Ockendon J., Howison S., Lacey A., Movchan A. Applied Partial Differential Equations
Подождите немного. Документ загружается.

48 FIRST-ORDER QUASILINEAR SYSTEMS
ICmnl < ICmnl = Cmn.
However, (2.36) is
8U _ Md 8U
U(6 y) =
May
(2.38)
8x
1 - U/Pd 8y
P-(1 - y/Pa )
which can be solved explicitly as in §1.3 and expanded in the form (2.37). This
gives the convergence of (2.37) and hence, by comparison, the convergence of (2.35)
to the unique analytic solution of the Cauchy problem. Now, of course, the prob-
lem (2.38) does not represent any real simplification over the problem (2.33), and
in any event both can be solved as in Chapter 1. However, the argument above
carries over almost unchanged when (2.33) is a vector equation for u, in which case
it is not solvable by the methods of Chapter 1. In this case (2.38) also becomes a
vector equation for U, but it transpires that all the components of U are equal so
that U can still be found explicitly as the solution of a scalar equation.
Note that the region in which the theorem guarantees existence of the solution
is restricted both by the size of Pa and Pd and by the possibility of blow-up of U;
the latter may impose quite a severe restriction when M. and Md are large, and
this emphasises the local nature of the theorem (see Exercise 2.6).
2.4
Hyperbolicity
We cannot overemphasise the restrictions on D and u that the Cauchy-Kowalev-
ski theorem demands, nor the requirement that the partial differential equation
can be written in the form 8u/8x = D(u) 8u/8y. However, even when all these
restrictions are met, because the theorem uses Taylor series expansions, it only
tells us about local existence and uniqueness and the Cauchy-Riemann system
demonstrates how local the existence result can be.
There are now two ways in which we can try to develop a more global theory for
those partial differential equations whose solutions can be expected to exist away
from any curve on which boundary conditions are posed. We could either look
for solutions of 8u/8t = D(u) Ou/8y which satisfy boundary conditions different
from, and less restrictive than, the Cauchy data (2.32) (for example, we could
prescribe fewer than n components of u on the boundary), or we could ask for
further restrictions on D whereby the Cauchy problem is well posed and hence
has a solution which is not restricted to some very small neighbourhood of the
y axis. We recall that in the first-order scalar equations of Chapter 1 no such
restriction was needed on the coefficient D.
The former approach leads us to the initial and boundary value problems for
elliptic and parabolic equations to be discussed in Chapters 5 and 6. The latter
idea leads to the concept of hyperbolicity and hyperbolic equations, which will be
described in detail in Chapter 4 for scalar second-order equations. However, we are
already in a position to describe an intuitive framework within which to answer
the question as to how D(u) should be restricted for the Cauchy problem for a
first-order system to be well posed.

HYPERBOLICITY 49
2.4.1 Two-by-two systems
We saw in §2.2 that, in certain cases, Riemann invariants exist for a system of
dimension two and hence a certain known function is constant along any charac-
teristic. Suppose now that the partial differential equation A 8u/Bx+B Ou/e9y = c
is in fact such that (2.26) yields two real distinct characteristics C1,2, and that the
consistency condition (2.27) can be integrated for both the Riemann invariants.
This occurs, for example, if A and B are constant and (2.26) has real distinct roots
for y/i. In this fortunate circumstance, if we prescribe u on a boundary r which is
nowhere tangent to C1,2, we can find u(P) by merely solving the pair of simultane-
ous algebraic equations given by the Riemann invariants at P (see Fig. 2.6(a)). We
can then immediately assert that the solution at P exists, is unique and depends
continuously on the data until or unless some pathology develops in the solution
of these algebraic equations. Thus the Cauchy problem is well posed.
In more general cases, we could imagine taking a sequence of points Pi close to
IF and iterating as indicated in Fig. 2.6(b), regarding A and B as constants in each
iteration. Hence, even when equations (2.26) and (2.27) do not have integrals, we
conjecture that, for a quasilinear first-order system of dimension two, the Cauchy
problem is well posed provided that (2.26) has two real distinct roots at each point
(x, y, u) of interest, that is, provided two characteristic directions exist at each
point. This provides the motivation for defining a hyperbolic system of dimension
two as one in which (2.26) has two real distinct roots for y/i. In general, these
roots depend on the solution u; even in the semilinear case when A and B depend
only on x and y, a system may be hyperbolic in only part of a given domain, so
that a problem of mixed type occurs. For the scalar equation aOu/8x+bOu/Oy = c
the problem is necessarily hyperbolic, and for the two-by-two vector case (2.21)
we distinguish the three possibilities, namely elliptic, parabolic and hyperbolic,
depending on whether there are no, one or two real characteristics, respectively.
This observation is the basis of the more detailed discussion of Chapter 3, where
(a)
(b)
Fig. 2.6 Solution by characteristics: (a) A and B constant; (b) approximate solution
when A and B are functions of u.
50
FIRST-ORDER QUASILINEAR SYSTEMS
we will see that the parabolic case is especially delicate. Indeed, the case where
both A and B are the identity matrix is parabolic under this classification, even
though the system comprises two scalar hyperbolic equations.
2.4.2
Systems of dimension n
With n dependent variables, (2.26) shows that at most n characteristic directions
exist at a point. Guided by a motivational argument similar to that which led to
Fig. 2.6, the system is said to be hyperbolic at that point if (2.26) has n distinct
real roots for A = y/i.
In order to consider the possibility of R.iemann invariants for systems of di-
mension n, we define the left eigenvector I corresponding to a root A
so
that
IT(B
- AA) = OT.
Premultiplying the partial differential equation by IT, we obtain
ITA 18 +ABn 1 =ITC.
y
If t is a scalar variable parametrising the characteristic, the generalisation of (2.27)
is
ITAiu = lT c i. (2.39)
Again, it is just one ordinary differential relation for the variation of a combination
of the n components of u along the characteristic. As remarked earlier, only when
n = 1 is it a first-order ordinary differential equation for u which, in the linear case,
reduces to a quadrature. In general, it cannot be integrated except for constant
coefficient equations, when, along the characteristic,
ITAn = IT 1 c dx'. (2.40)
The unlikelihood of integrating (2.39), even in the case c = 0, can be seen at once
when n = 3, because it is well known that the Pfafan
P du = Pi (u) dul + P2 (u) du3 + P3 (u) du3
is proportional to a total differential dqS(u) if and only if
the curl being taken with respect to u. Thus, even autonomous equations with
c = 0 rarely have Riemann invariants as soon as n >, 3.
If n Riemann invariants do exist for a hyperbolic system, then on each charac-
teristic there is one algebraic relation between the n components of u. The exis-
tence and uniqueness of u are thus assured in some neighbourhood of a boundary
on which u is prescribed, assuming the boundary is nowhere parallel to a char-
acteristic. However, we must be careful with the definition of this neighbourhood
HYPERBOLICITY 51
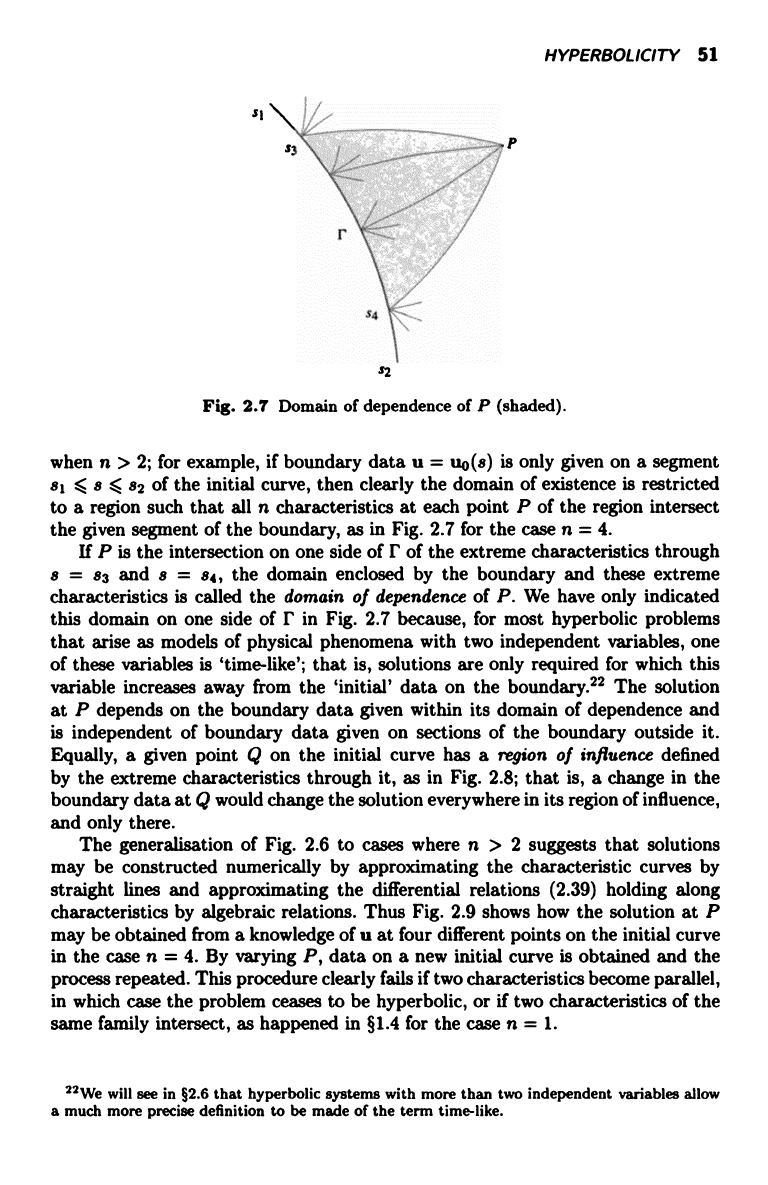
Fig. 2.7 Domain of dependence of P (shaded).
when n > 2; for example, if boundary data u = uo(s) is only given on a segment
81 < 8 <, 82 of the initial curve, then clearly the domain of existence is restricted
to a region such that all n characteristics at each point P of the region intersect
the given segment of the boundary, as in Fig. 2.7 for the case n = 4.
If P is the intersection on one side of r of the extreme characteristics through
8 = 83 and s = 84, the domain enclosed by the boundary and these extreme
characteristics is called the domain of dependence of P. We have only indicated
this domain on one side of r in Fig. 2.7 because, for most hyperbolic problems
that arise as models of physical phenomena with two independent variables, one
of these variables is 'time-like'; that is, solutions are only required for which this
variable increases away from the `initial' data on the boundary.22 The solution
at P depends on the boundary data given within its domain of dependence and
is independent of boundary data given on sections of the boundary outside it.
Equally, a given point Q on the initial curve has a region of influence defined
by the extreme characteristics through it, as in Fig. 2.8; that is, a change in the
boundary data at Q would change the solution everywhere in its region of influence,
and only there.
The generalisation of Fig. 2.6 to cases where n > 2 suggests that solutions
may be constructed numerically by approximating the characteristic curves by
straight lines and approximating the differential relations (2.39) holding along
characteristics by algebraic relations. Thus Fig. 2.9 shows how the solution at P
may be obtained from a knowledge of u at four different points on the initial curve
in the case n = 4. By varying P, data on a new initial curve is obtained and the
process repeated. This procedure clearly fails if two characteristics become parallel,
in which case the problem ceases to be hyperbolic, or if two characteristics of the
same family intersect, as happened in §1.4 for the case n = 1.
22 We will see in §2.6 that hyperbolic systems with more than two independent variables allow
a much more precise definition to be made of the term time-like.

52 FIRST-ORDER QUASILINEAR SYSTEMS
Fig. 2.8 Region of influence of Q (shaded).
Fig. 2.9 The solution at P using linear approximations to the characteristics.
If Riemann invariants exist, some explicit results may be obtained in closed
form. The following examples (which refer to the models introduced in §2.1) and
remarks illustrate the kind of information that may be obtained.
2.4.3
Examples
Shallow water theory
In this example, described by (2.1) and (2.2), we identify (z, y) in our general
discussion above with (t, z), and we find
A=u±a, where a= &,
and the Riemann invariants are u ± 28, respectively. The system is always hyper-
bolic unless the river is dry, but the nonlinearity means that the characteristics
HYPERBOtICITY 53
can often intersect, corresponding to the formation of a `bore' or `hydraulic jump'.
In §4.8.1 we will see how to use these Riemann invariants to generate some useful
explicit solutions to (2.1) and (2.2).
This example illustrates the point that the existence of Riemann invariants is by
no means a necessary condition for a first-order system to have explicit solutions,
because we cannot usually locate the characteristics explicitly. Among the many
clever `tricks' for guessing explicit solutions, one possibility to keep in mind for
autonomous systems such as (2.1) and (2.2) is that of exchanging the roles of
dependent and independent variables. We see that, if we attempt the hodogrnph
transformation
x = X(u, h),
t = T(u, h), (2.41)
so that, by the chain rule,
Ou
1 ax
at -dah'
etc., with the Jacobian
_8T Ox
OT OX
Ou8h ahau
assumed non-zero, then we obtain the linear system23
Ox
aT 8T_
ah -
U - 5 7
h + au 0'
8u - u
u
+h
8h
= 0,
where we have set g = 1 for simplicity. This of course only works because there are
no undifferentiated terms in the original equations (2.1) and (2.2), but it has an
interesting geometrical interpretation which will be discussed further in Chapter 4.
Unsteady one-dimensional gas dynamics
Rearranging (2.4) (with the help of (2.3)) as
Tt OX
Ox
and again identifying (t, x) with (x, y), we find, after some calculations (Exer-
cise 2.10), that the system is always hyperbolic with
A=u or
\=u±JJ_T
V P
as the slopes of the characteristics, on which
rypdp - pdp = 0,
ryppdu + dp = 0,
respectively. Hence p/p7 is constant on dx/dt = u but, in general, Riemann in-
variants do not exist on all three families of characteristics.
23See (301 for
a discussion of the corresponding system in gas dynamics.

54
FIRST-ORDER QUASILINEAR SYSTEMS
Steady two-dimensional gas dynamics
Our analysis in §2.2 of the linearised system (2.8)-(2.10) has already revealed the
existence of three real distinct characteristics when the basic flow is supersonic,
and it is only under these circumstances that the system is hyperbolic. A slightly
different situation arises for the full (unlinearised) system (2.5)-(2.7) where, after
more lengthy algebraic manipulations (Exercise 2.11), we find
=
v
A twice or A = tan (tan-' (V)
f sin-'
7P
/
.
u
u
p(u2 + v2)
Now, there are four real roots when u2 + v2 > ryp/p, in which case the flow is again
said to be supersonic. However, the system is not strictly hyperbolic even when
the flow is supersonic because two of the eigenvalues, namely A = v/u, coincide; in
practice, however, the solutions usually behave as if the system were hyperbolic.
In both of the examples above, neighbouring members of the second or third
families of characteristics found above can intersect in general to form gasdynamic
shock waves. Much more will be said about these shock waves in the next section.
Flow of granular materials
The model (2.13) with h = 1, together with the relation (2.16) between r, o- and
oy, can, after a long calculation (started in Exercise 2.3, where tP is defined, and
continued in Exercise 2.14), be shown to be always hyperbolic with
A=-cot l0±I 4 21
and the Riemann invariants are
fcot0log1-o22av I+2,i
respectively. We remark that these characteristics are not the slip planes that were
needed to formulate the model.
Fluidised and packed beds
The two linear models (2.17) and (2.18), and (2.19) and (2.20) are clearly always
hyperbolic; the characteristics of the latter are given by
dx
dt
= va, vb,
while for the former one of these characteristic `speeds' is zero. However, the pres-
ence of the undifferentiated terms means that there are no explicit Riemann in-
variants unless k or h is zero. Fortunately, the linearity of these models enables us
to circumvent this difficulty, as we shall see in Chapter 4.
As an aside, suppose that k = 0 in (2.19) and (2.20) and we were attempting to
solve the Cauchy problem in which ca and cb, which are now Riemann invariants,
WEAK SOLUTIONS AND SHOCK WAVES 55
were prescribed on the non-characteristic curve t = 0. Now suppose further that
we were interested in modelling a fluidised bed of finite depth, and we were unsure
(as we often are) about the boundary conditions that should be applied at the top
and bottom of the bed. One thing we can be sure of at once is that we should not
impose values of either cQ or cb at the top of the bed, towards which the gas is
moving with velocity va or vb. If such values were prescribed, they would almost
certainly clash with the values of the Riemann invariants that follow from the
Cauchy data.
Optical fibre model
A transformation slightly less obvious than the hodograph transformation (2.41)
can be applied to the optical fibre model (2.11) and (2.12). For a given T, this
system is hyperbolic (unlike most models of slow viscous flow), with characteristics
dx/dt = u, the local fluid velocity, and t = constant, corresponding to infinite
propagation speed in the incompressible glass. However, the presence of T means
that there are no explicit Riemann invariants. Nonetheless, if we write the `partial'
hodograph transformation
x = x(A, t),
u = u(A, t),
and rescale this so that r = fo T(t') dt', we find (Exercise 2.15) that x satisfies the
linear equation
82x 82x
1 ex
8A2 - c8A8r q 8A'
which can be solved explicitly for 8x/8A. This enables us to show that the char-
acteristics never intersect.
The whole question of finding whether any given quasilinear system has enough
symmetry to be able to be integrated explicitly is intimately connected with the
theory of groups that depend on a continuously-varying parameter. We will return
to this on several later occasions but, for now, the all-too-frequent occurrence of
shock waves as a result of the intersection of characteristics of hyperbolic systems
demands immediate attention.
«2.5
Weak solutions and shock waves
We have shown at the end of §2.2 that, for a hyperbolic system, the first derivatives
of u can be discontinuous across a characteristic, and in Chapter 1 we have given
several examples where characteristics may intersect to cause discontinuities in u
itself. Hence, following the discussion of weak solutions for the scalar equations of
Chapter 1, we examine the possibility of jump discontinuities in u across a curve r
for the system A 8u/8x + B Ou/ey = c. Because Green's theorem plays a crucial
role, we only really have any hope of generalising the theory presented in §1.7 for a
hyperbolic system when it is in conservation form. Hence we consider the problem
of defining a weak solution of
8u 8v
+ 8y
= C,
(2.42)
8x
56
FIRST-ORDER QUASILINEAR SYSTEMS
where v and c are functions of u, x and y; for simplicity, initial data u = uo(y) is
given on x = 0 and the domain of interest is x > 0. For (2.42) to be hyperbolic, the
matrix (Ov;/Suj) must have n distinct real eigenvalues. If we now multiply (2.42)
by a test function O(x, y), differentiable everywhere in x > 0 and such that
-+ 0
sufficiently rapidly as x or y -+ oo, then, using Green's theorem on the half plane
x > 0, we obtain
VP
c*
+ v
+ 1 c I dx dy
J
(2.43)
ff
I u
>o \
8x ey ey
/
00
The statement (2.43) generalises (1.25), and our restrictions on the behaviour
of 0 have left us with a convenient right-hand side. The equation makes sense
even if u is discontinuous, and hence we define a weak solution of (2.42) to be a
function u satisfying (2.43) for all suitable test functions v/0. If the weak solution u
is continuous then clearly, retracing our steps, (2.43) implies (2.42) and a classical
solution is a weak solution. A weak solution need not, however, be continuous; if
it is discontinuous across a curve F then, carrying over the argument leading to
(1.27) and applying Green's theorem to (2.43) for the domain x > 0 excluding r,
we obtain
Ir [tGu]± dy = J [ 1'v]± dx. (2.44)
r
Since zji is continuous across r and (2.44) holds for all such ip, then, necessarily,
= [v]+,
(2.45)
(u)±
TX
which is the jump or Rankine-Hugoniot condition for a general hyperbolic system
of conservation laws.
For a semilinear problem, v is equal to Du, where D is a matrix which does not
depend on u, and hence dy/dx is an eigenvalue of D. In this case discontinuities
in u can occur across any of the characteristics. In general, however, they lie on
curves called shocks, which are definitely not characteristics.
Of course, the approach above inherits all the non-uniqueness properties that
were encountered in Chapter 1 for the case n = 1. We will now describe two ways
in which this non-uniqueness might be resolved.
2.5.1 Causality
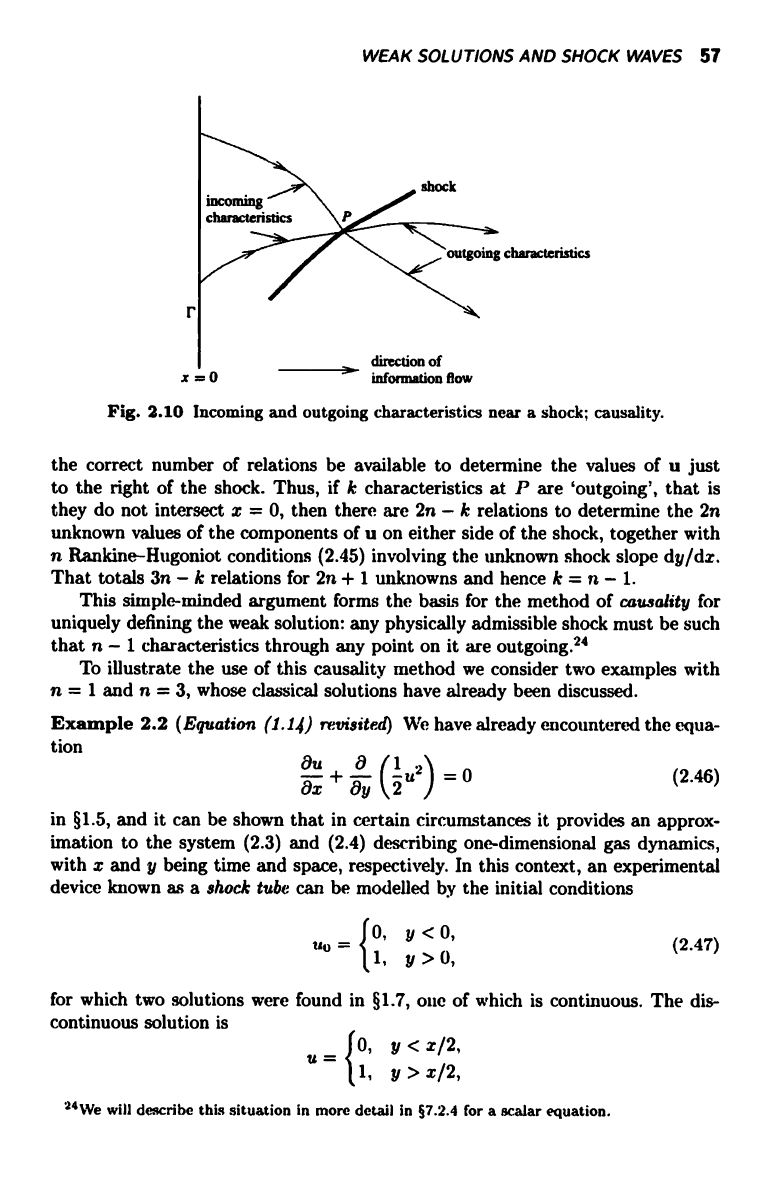
We begin by remarking that we can construct weak solutions by piecing together
classical solutions using the jump condition (2.45). At a point P on the shock there
are n characteristic directions on each side of it, as in Fig. 2.10 for the case n = 2.
These 2n characteristics through P form two classes, those that intersect x = 0
and those that do not.
On each characteristic which intersects x = 0, some information propagates
about the boundary data uo(y); in the special case when a Riemann invariant
exists on the characteristics, this takes the form of a prescribed algebraic relation
between the components of u as we approach the shock (from the left in Fig. 2.10).
For the shock strength (u) and direction to be defined uniquely it is necessary that
WEAK SOLUTIONS AND SHOCK WAVES 57
Fig. 2.10 Incoming and outgoing characteristics near a shock; causality.
the correct number of relations be available to determine the values of u just
to the right of the shock. Thus, if k characteristics at P are `outgoing', that is
they do not intersect x = 0, then there are 2n - k relations to determine the 2n
unknown values of the components of u on either side of the shock, together with
n Rankine-Hugoniot conditions (2.45) involving the unknown shock slope dy/dx.
That totals 3n - k relations for 2n + 1 unknowns and hence k = n - I.
This simple-minded argument forms the basis for the method of causality for
uniquely defining the weak solution: any physically admissible shock must be such
that n - 1 characteristics through any point on it are outgoing.24
To illustrate the use of this causality method we consider two examples with
n = 1 and n = 3, whose classical solutions have already been discussed.
Example 2.2 (Equation (1.14) revisited) We have already encountered the equa-
tion
8x
+ 8y ( 2
u2)
= 0
(2.46)
in §1.5, and it can be shown that in certain circumstances it provides an approx-
imation to the system (2.3) and (2.4) describing one-dimensional gas dynamics,
with x and y being time and space, respectively. In this context, an experimental
device known as a shock tube can be modelled by the initial conditions
_ Jo y < o
1,
Y>01
(2.47)
for which two solutions were found in §1.7, one of which is continuous. The dis-
continuous solution is
u=
0,
y < x/2,
Sl
1, y>x/2,
24We will describe this situation in more detail in §7.2.4 for a scalar equation.