Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Teleoperation References 465
References
27.1 T. Sheridan: Telerobotics, Automation and Human
Supervisory Control (MIT Press, Cambridge 1992)
27.2 E. Nu
˜
no,A.Rodríguez,L.Basa
˜
nez: Force reflect-
ing teleoperation via IPv6 protocol with geometric
constraints haptic guidance. In: Advances in Teler-
obotics, STAR, Vol. 31 (Springer, Berlin, Heidelberg
2007) pp. 445–458
27.3 R.J. Anderson, M.W. Spong: Bilateral control of
teleoperators with time delay, IEEE Trans. Autom.
Control 34(5), 494–501 (1989)
27.4 G. Niemeyer, J.J.E. Slotine: Stable adaptive teleop-
eration, IEEE J. Ocean. Eng. 16(1), 152–162 (1991)
27.5 P. Arcara, C. Melchiorri: Control schemes for tele-
operation with time delay: A comparative study,
Robot. Auton. Syst. 38,49–64(2002)
27.6 P.F. Hokayem, M.W. Spong: Bilateral teleoperation:
An historical survey, Automatica 42, 2035–2057
(2006)
27.7 R. Ortega, N. Chopra, M.W. Spong: A new pas-
sivity formulation for bilateral teleoperation with
time delays, Proc. CNRS-NSF Workshop: Advances
in time-delay systems (Paris, 2003)
27.8 E. Nu
˜
no,L.Basa
˜
nez, R. Ortega: Passive bilateral
teleoperation framework for assisted robotic tasks,
Proc. IEEE Int. Conf. Robot. Autom. (Rome, 2007)
pp. 1645–1650
27.9 S. Munir, W.J. Book: Control techniques and pro-
gramming issues for time delayed internet based
teleoperation, ASME J. Dyn. Syst. Meas. Control
125(2), 205–214 (2004)
27.10 S.E. Salcudean, M. Zhu, W.-H. Zhu, K. Hashtrudi-
Zaad: Transparent bilateral teleoperation under
position and rate control, Int. J. Robot. Res. 19(12),
1185–1202 (2000)
27.11 N. Chopra, M.W. Spong, R. Ortega, N. Barbanov:
On tracking performance in bilateral teleoperation,
IEEE Trans. Robot. 22(4), 844–847 (2006)
27.12 T. Namerikawa, H. Kawada: Symmetric impedance
matched teleoperation with position tracking,
Proc. 45th IEEE Conf. Decis. Control (San Diego,
2006) pp. 4496–4501
27.13 E. Nu
˜
no, R. Ortega, N. Barabanov, L. Basa
˜
nez: A
globally stable proportional plus derivative con-
troller for bilateral teleoperators, IEEE Trans. Robot.
24(3), 753–758 (2008)
27.14 R. Lozano, N. Chopra, M.W. Spong: Convergence
analysis of bilateral teleoperation with constant
human input, Proc. Am. Control Conf. (New York
2007) pp. 1443–1448
27.15 R. Lozano, N. Chopra, M.W. Spong: Passivation of
force reflecting bilateral teleoperators with time
varying delay, Proc. Mechatron. Conf. (Entschede
2002)
27.16 N. Chopra, M.W. Spong: Adaptive synchroniza-
tion of bilateral teleoperators with time delay. In:
Advances in Telerobotics, STAR, Vol. 31 (Springer,
Berlin, Heidelberg 2007) pp. 257–270
27.17 C. Secchi, S. Stramigioli, C. Fantuzzi: Variable de-
lay in scaled port-Hamiltonian telemanipulation,
Proc. 8th Int. IFAC Symp. Robot Control (Bologna
2006)
27.18 M. Boukhnifer, A. Ferreira: Wave-based passive
control for transparent micro-teleoperation sys-
tem, Robot. Auton. Syst. 54(7), 601–615 (2006)
27.19 P. Loshin: IPv6, Theory, Protocol, and Practice,2nd
edn. (Morgan Kaufmann, San Francisco 2003)
27.20 W.R. Sherman, A. Craig: Understanding Virtual Re-
ality. Interface, Application and Design (Morgan
Kaufmann, San Francisco 2003)
27.21 R. Azuma: A survey of augmented reality, Presence
Teleoper. Virtual Environ. 6(4), 355–385 (1997)
27.22 M. Inami, N. kawakami, S. Tachi: Optical camou-
flage using retro-reflective projection technology,
Proc. Int. Symp. Mixed Augment. Real. (Tokyo 2003)
pp. 18–22
27.23 R. Azuma, Y. Baillot, R. Behringer, S. Feiner,
S. Julien, B. MacIntyre: Recent advances in aug-
mented reality, IEEE Comp. Graphics Appl. 21(6),
34–47 (2001)
27.24 A. Rastogi, P. Milgram, J. Grodski: Augmented
telerobotic control: A visual interface for un-
structured environments, Proc. KBS/Robot. Conf.
(Montreal 1995)
27.25 A.Kron,G.Schimdt,B.Petzold,M.Zäh,P.Hinter-
seer, E. Steinbach: Disposal of explosive ordnances
by use of a bimanual haptic system, Proc. IEEE Int.
Conf. Robot. Autom. (New Orleans 2004) pp. 1968–
1973
27.26 A. Ansar, D. Rodrigues, J. Desai, K. Daniilidis,
V. Kumar, M. Campos: Visual and haptic collabora-
tive tele-presence, Comput. Graph. 25(5), 789–798
(2001)
27.27 B. Dejong, E. Faulring, E. Colgate, M. Peshkin,
H. Kang, Y. Park, T. Erwing: Lessons learned froma
novel teleoperation testbed, Ind. Robot: Int. J.
33(3), 187–193 (2006)
27.28 Y. Xiong, S. Li, M. Xie: Predictive display and inter-
action of telerobots based on augmented reality,
Robotica 24, 447–453 (2006)
27.29 S. Otmane, M. Mallem, A. Kheddar, F. Chavand: Ac-
tive virtual guides as an apparatus for augmented
reality based telemanipulation system on the in-
ternet, Proc. 33rd Annu. Simul. Symp. (Washington
2000) pp. 185–191
27.30 J.Gu,E.Auguirre,P.Cohen:Anaugmentedre-
ality interface for telerobotic applications, Proc.
Workshop Appl. Comput. Vis. (Orlando 2002)
pp. 220–224
27.31 A. Rodríguez, L. Basa
˜
nez, E. Celaya: A Relational
Positioning Methodology for Robot Task Specifi-
Part C 27
466 Part C Automation Design: Theory, Elements, and Methods
cation and Execution, IEEE Trans. Robot. 24(3),
600–611 (2008)
27.32 Y.H. Liu: Computing n-finger form-closure grasps
on polygonal objects, Int. J. Robot. Res. 19(2), 149–
158 (2000)
27.33 D. Ding, Y. Liu, S. Wang: Computation of 3-D form-
closure grasps, IEEE Trans. Robot. Autom. 17(4),
515–522 (2001)
27.34 M. Roa, R. Suárez: Finding locally optimum force-
closure grasps, Robot. Comput.-Integr. Manuf. 25,
536–544 (2009)
27.35 J. Cornell
`
a, R. Suárez, R. Carloni, C. Melchiorri: Dual
programming based approach for optimal grasp-
ing force distribution, Mechatronics 18(7), 348–356
(2008)
27.36 T.B.Martin,R.O.Ambrose,M.A.Diftler,R.Platt,
M.J. Butzer: Tactile gloves for autonomous grasping
with the NASA/DARPA Robonaut, Proc. IEEE Int. Conf.
Robot. Autom. (New Orleans 2004) pp. 1713–1718
27.37 M.Bergamasco,A.Frisoli,C.A.Avizzano:Exo-
skeletons as man–machine interface systems for
teleoperation and interaction in virtual environ-
ments. In: Advances in Telerobotics STAR Ser., Vol.
31 (Springer, New York 2007) pp. 61–76
27.38 S.B. Kang, K. Ikeuchi: Grasp recognition using the
contact web, Proc. IEEE/RSJ Int. Conf. Intell. Robots
Syst. (Raleigh 1992) pp. 194–201
27.39 R.L. Feller, C.K.L. Lau, C.R. Wagner, D.P. Pemn,
R.D. Howe: The effect of force feedback on remote
palpation, Proc. IEEE Int. Conf. Robot. Autom. (New
Orleans 2004) pp. 782–788
27.40 M. Benali-Khoudja, M. Hafez, J.M. Alexandre,
A. Kheddar: Tactile interfaces: a state-of-the-art
survey, Proc. 35th Int. Symp. Robot. (Paris 2004)
pp. 721–726
27.41 T. Wotjara, K. Nonami: Hand posture detection by
neural network and grasp mapping for a master–
slave hand system, Proc. IEEE/RSJ Int. Conf. Intell.
Robots Syst. (Sendai 2004) pp. 866–871
27.42 M. Roa, R. Suárez: Independent contact regions for
frictional grasps on 3-D objects, Proc. IEEE Int. Conf.
Robot. Autom. (Pasadena 2008)
27.43 K.B. Shimoga: Robot grasp synthesis algorithms: a
survey,Int.J.Robot.Res.15(3), 230–266 (1996)
27.44 R. Suárez, P. Grosch: Mechanical hand MA-I as ex-
perimental system for grasping and manipulation,
Video Proc. IEEE Int. Conf. Robot. Autom. (Barcelona
2005)
27.45 A. Iborra, J.A. Pastor, B. Alvarez, C. Fernandez,
J.M. Fernandez: Robotics in radioactive environ-
ments, IEEE Robot. Autom. Mag. 10(4), 12–22 (2003)
27.46 W. Book, L. Love: Teleoperation telerobotics tele-
presence. In: Handbook of Industrial Robotics,2nd
edn. (Wiley, New York 1999) pp. 167–186
27.47 R. Aracil, M. Ferre: Telerobotics for aerial live power
line maintenance. In: Advances in Telerobotics,
STAR Ser., Vol. 31, (Springer, Berlin, Heidelberg 2007)
459–469
27.48 J.H.Dunlap,J.M.VanName,J.A.Henkener:Robotic
maintenance of overhead transmission lines, IEEE
Trans. Power Deliv. 1
(3), 280–284 (1986)
27.49 R.Aracil,M.Ferre,M.Hernando,E.Pinto,J.M.Se-
bastian: Telerobotic system for live-power line
maintenance: ROBTET, Control Eng. Prac. 10(11),
1271–1281 (2002)
27.50 C.T. Haas, Y.S. Ki: Automation in infrastructure con-
struction, Constr. Innov. 2,191–210(2002)
27.51 Y. Hiramatsu, T. Aono, M. Nishio: Disaster restora-
tion work for the eruption of Mt Usuzan using an
unmanned construction system, Adv. Robot. 16(6),
505–508 (2002)
27.52 A.M. Lytle, K.S. Saidi, R.V. Bostelman, W.C. Stones,
N.A. Scott: Adapting a teleoperated device for
autonomous control using three-dimensional po-
sitioning sensors: experiences with the NIST
RoboCrane, Autom. Constr. 13, 101–118 (2004)
27.53 A.J. Kwitowski, W.D. Mayercheck, A.L. Brautigam:
Teleoperation for continuous miners and haulage
equipment, IEEE Trans. Ind. Appl. 28(5), 1118–1125
(1992)
27.54 G. Baiden, M. Scoble, S. Flewelling: Robotic sys-
tems development for mining automation, Bull.
Can.Inst.Min.Metall.86.972, 75–77 (1993)
27.55 J.C. Ralston, D.W. Hainsworth, D.C. Reid, D.L. An-
derson, R.J. McPhee: Recent advances in remote
coal mining machine sensing, guidance, and tele-
operation, Robotica 19(4), 513–526 (2001)
27.56 A.J. Park, R.N. Kazman: Augmented reality for min-
ing teleoperation, Proc. of SPIE Int. Symp. Intell.
Syst.Adv.Manuf.–Telemanip.TelepresenceTech-
nol. (1995) pp. 119–129
27.57 T.J. Nelson, M.R. Olson: Long delay telecontrol of
lunar mining equipment, Proc. 6th Int. Conf. Expo.
Eng., Constr., Oper. Space, ed. by R.G. Galloway,
S.Lokaj(Am.Soc.Civ.Eng.,Reston1998)pp.477–
484
27.58 N. Wilkinson: Cooperative control in teleoperated
mining environments, 55th Int. Astronaut. Congr.
Int. Astronaut. Fed., Int. Acad. Astronaut. Int. Inst.
Space Law (Vancouver 2004)
27.59 P. Ridao, M. Carreras, E. Hernandez, N. Palom-
eras: Underwater telerobotics for collaborative
research. In: Advances in Telerobotics,STARSer.,
Vol. 31 (Springer, Berlin, Heidelberg 2007) pp. 347–
359
27.60 S. Harris, R. Ballard: ARGO: Capabilities for deep
ocean exploration, Oceans 18,6–8(1986)
27.61 M. Fontolan: Prestige oil recovery from the sunken
part of the Wreck, PAJ Oil Spill Symp. (Petroleum
Association of Japan, Tokyo 2005)
27.62 G. Antonelli (Ed.): Underwater Robots: Motion
and Force Control of Vehicle–Manipulator Systems
(Springer, Berlin 2003)
27.63 C. Canudas-de-Wit, E.O. Diaz, M. Perrier: Ro-
bust nonlinear control of an underwater vehi-
cle/manipulator system with composite dynamics,
Part C 27
Teleoperation References 467
Proc. IEEE Int. Conf. Robot. Autom. (Leuven 1998)
pp. 452–457
27.64 M. Lee, H-S. Choi: A robust neural controller for
underwater robot manipulators, IEEE Trans. Neural
Netw. 11(6), 1465–1470 (2000)
27.65 J. Kumagai: Swimming to Europe, IEEE Spectrum
44(9), 33–40 (2007)
27.66 L. Pedersen, D. Kortenkamp, D. Wettergreen,
I. Nourbakhsh: A survey of space robotics, Proc.
7th Int. Symp. Artif. Intell., Robot. Autom. Space
(Nara 2003)
27.67 F. Doctor, A Glas, Z. Pronk: Mission prepara-
tion support of the European Robotic Arm (ERA),
National Aerospace Laboratory report NLR-TP-
2002-650 (Netherlands 2003)
27.68 S.Roderick,B.Roberts,E.Atkins,D.Akin:The
ranger robotic satellite servicer and its autonomous
software-based safety system, IEEE Intell. Syst.
19(5), 12–19 (2004)
27.69 W. Bluethmann, R. Ambrose, M. Diftler, S. Askew,
E. Huber, M. Goza, F. Rehnmark, C. Lovchik, D. Ma-
gruder: Robonaut: A robot designed to work with
humans in spaces, Auton. Robots 14, 179–197 (2003)
27.70 G. Hirzinger, B. Brunner, K. Landzettel, N. Sporer,
J. Butterfass, M. Schedl: Space Robotics – DLR’s
telerobotic concepts, lightweight arms and articu-
lated hands, Auton. Robots 14, 127–145 (2003)
27.71 S.E. Fredrickson, S. Duran, J.D. Mitchell: Mini AER-
Cam inspection robot for human space missions,
AIAA Space 2004 Conf. Exhib. (San Diego 2004)
27.72 T. Imaida, Y. Yokokohji, T. Doi, M. Oda,
T. Yoshikawa: Ground–space bilateral teleoper-
ation of ETS-VII robot arm by direct bilateral
coupling under 7-s time delay condition, IEEE
Trans. Robot. Autom. 20(3), 499–511 (2004)
27.73 R.A. Lindemann, D.B. Bickler, B.D. Harrington,
G.M. Ortiz, C.J. Voorhees: Mars exploration rover
mobility development, IEEE Robot. Autom. Mag.
13(2), 19–26 (2006)
27.74 G.A. Landis: Robots and humans: synergy in plan-
etary exploration, Acta Astronaut. 55(12), 985–990
(2004)
27.75 J.W. Hill, P.S. Green, J.F. Jensen, Y. Gorfu,
A.S. Shah: Telepresence surgery demonstration
system, Proc. IEEE Int. Conf. Robot. Autom. (IEEE
Computer Society, San Diego 1994) pp. 2302–2307
27.76 J. Marescaux, J. Leroy, M. Gagner, F. Rubino,
D. Mutter, M. Vix, S.E. Butner, M. Smith: Transat-
lantic robot-assisted telesurgery, Nature 413,
379–380 (2001)
27.77 S.E. Butner, M. Ghodoussi: A real-time system for
tele-surgery, Proc. 21st Int. Conf. Distrib. Com-
put. Syst. (IEEE Computer Society, Washington 2001)
pp. 236–243
27.78 G.S. Guthart, J.K. Jr. Salisbury: The Intuitive
telesurgery system: overview and application,
Proc. IEEE Int. Conf. Robot. Autom. (San Francisco
2000) pp. 618–621
27.79 M. Li, A. Kapoor, R.H. Taylor: Telerobotic control
by virtual fixtures for surgical applications. In:
Advances in Telerobotics, STAR, Vol. 31 (Springer,
Berlin, Heidelberg 2007) pp. 381–401
27.80 A. Smith, J. Smith, D.G. Jayne: Telerobotics: surgery
for the 21st century, Surgery 24(2), 74–78 (2006)
27.81 M. Topping: An Overview of the development of
Handy 1, a rehabilitation robot to assist the severely
disabled, J. Intell. Robot. Syst. 34(3), 253–263
(2002)
27.82 C. Balaguer, A. Giménez, A. Jardón, R. Correal,
S. Martínez, A.M. Sabatini, V. Genovese: Proprio,
teleoperation of a robotic system for disabled per-
sons’ assistance in domestic environments. In:
Advances in Telerobotics, STAR, Vol. 31 (Springer,
Berlin, Heidelberg 2007) pp. 415–427
27.83 O. Reinoso, C. Fernández, R.
˜
Neco: User voice as-
sistance tool for teleoperation. In: Advances in
Telerobotics, STAR Ser., Vol. 31 (Springer, Berlin,
Heidelberg 2007) pp. 107–120
27.84 K. Kawamura, M. Iskarous: Trends in service
robots for the disabled and the elderly, Proc.
IEEE/RSJ/GI Int. Conf. Intell. Robots Syst. (Munich
1994) pp. 1647–1654
27.85 G. Pires, U. Nunes: A wheelchair steered through
voice commands and assisted by a reactive fuzzy
logic controller, J. Intell. Robot. Syst. 34(3), 301–314
(2002)
27.86 P. Hoppenot, E. Colle: Human-like behavior robot-
application to disabled people assistance, Proc.
IEEE Int. Conf. Syst., Man, Cybern. (Soc. Syst. Man
Cyber., Nashville 2000) pp. 155–160, .
27.87 M.E.Pollack,S.Engberg,J.T.Matthews,S.Thrun,
L. Brown, D. Colbry, C. Orosz, B. Peintner,
S. Ramakrishnan, J. Dunbar-Jacob, C. McCarthy,
M. Montemerlo, J. Pineau, N. Roy: Pearl: A mo-
bile robotic assistant for the elderly, AAAI Workshop
Autom. Eldercare (Alberta 2002)
27.88 T. Wojtara, K. Nonami, H. Shao, R. Yuasa, S. Amano,
D. Waterman, Y. Nobumoto: Hydraulic master–
slave land mine clearance robot hand controlled
by pulse modulation, Mechatronics 15,589–609
(2005)
27.89 K. Kato, S. Hirose: Development of the quadruped
walking robot, TITAN-IX–mechanical design con-
cept and application for the humanitarian demi-
ning robot, Adv. Robot. 15(2), 191–204 (2001)
27.90 P. Gonzalez de Santos, E. Garcia, J.A. Cobano,
A. Ramirez: SILO6: A six-legged robot for humani-
tarian demining tasks, Proc. 10th Int. Symp. Robot.
Appl. World Autom. Congr. (2004)
27.91 J.-D. Nicoud: Vehicles and robots for humanitarian
demining, Ind. Robot 24(2), 164–168 (1997)
27.92 M.K. Habib: Humanitarian demining: reality and
the challenge of technology – the state of the arts,
Int. J. Adv. Robot. Syst. 4(2), 151–172 (2007)
27.93 C.S. Tzafestas, N. Palaiologou, M. Alifragis: Vir-
tual and remote robotic laboratory: comparative
Part C 27
468 Part C Automation Design: Theory, Elements, and Methods
experimental evaluation, IEEE Trans. Educ. 49(3),
360–369 (2006)
27.94 X.Giralt,D.Jofre,R.Costa,L.Basa
˜
nez: Proyecto
de Laboratorio Remoto de Automática: Objetivos
y Arquitectura Propuesta, III Jornadas de Trabajo
EIWISA 02, Ense
˜
nanza vía Internet/Web de la In-
geniería de Sistemas y Automática (Alicante, 2002)
pp. 93–98, in Spanish
27.95 M. Alencastre, L. Munoz, I. Rudomon: Teleoperat-
ing robots in multiuser virtual environments, Proc.
4th Mexican Int. Conf. Comp. Sci. (Tlaxcala 2003)
pp. 314–321
Part C 27

469
Distributed A
28. Distributed Agent Software for Automation
Francisco P. Maturana, Dan L. Carnahan, Kenwood H. Hall
Agent-based software and hardware technologies
have emerged as a major approach to organize
and integrate distributed elements of complex au-
tomation. As an example, this chapter focuses on
a particular situation. Composite curing, a rapidly
developing industry process, generates high costs
when not properly controlled. Curing autoclaves
require tight control over temperature that must
be uniform throughout the curing vessel. This
chapter discusses how agent-based software is
being implemented into the curing process by
pushing control logic down to the lowest level
of the control hierarchy into the process con-
troller, i. e., the programmable logic controller
(PLC). The chapter also discusses how the ben-
efits of process survivability, diagnostics, and
dynamic reconfiguration are achieved through the
use of autoclave and thermocouple intelligent
agents.
28.1 Composite Curing Background ............... 471
28.2 Industrial Agent Architecture................. 473
28.2.1 Agent Design
and Partitioning Perspective........ 474
28.2.2 Agent Tool................................. 475
28.3 Building Agents for the Curing System.... 475
28.4 Autoclave and Thermocouple Agents ...... 477
28.4.1 Autoclave Agent ......................... 477
28.4.2 Thermocouple Agent................... 478
28.5 Agent-Based Simulation ....................... 478
28.6 Composite Curing Results
and Recommendations ......................... 480
28.6.1 Designing the Validation System .. 480
28.6.2 Modeling Process Dynamics ......... 481
28.6.3 Timing and Stability Criteria ........ 484
28.7 Conclusions .......................................... 484
28.8 Further Reading ................................... 484
References .................................................. 485
A general introduction and overview of agent-based
automation can be found in the additional reading
listed. Autoclave curing is vital to the production
and support of many industries. In fact, there are
so many industries that are dependent upon auto-
clave curing that improvements to curing production
controls would lend a competitive advantage to the
corporation that could deliver these improvements.
While the focus of this particular work is directed
predominately towards the production of compos-
ite materials, there are many other processes that
could benefit from this work, with almost no dif-
ferences in terms of the autoclave curing controls.
This is especially true for the following products
that require autoclave curing: composite materials,
polymers, rubber, concrete products (e.g., sand-lime
brick, asbestos, hydrous calcium silicate, cement (steam
curing)), tobacco, textiles, electrical and electronics
products (e.g., printed circuit boards (PCBs), ceramic
substrates) chemical, medical/pharmaceutical products,
wood and buildingproducts, metallurgical products,tire
rethreading, glass laminating, and aircraft/aerospace
products.
Much work has recently been reported for new cur-
ing methods and autoclave curing devices. This is one
indication that there is a trend towards researching and
developing new and better ways of curing materials.
This research and development (R&D) has increased
to meet market demands and technical papers regard-
ing materials curing is proliferating. Market research
studies also support the notion that there is increased
demand for composite materials and that this trend
will continue in the future. With increased demand
comes a need for increased efficiencies in the curing
production process. Composite material manufacturers,
aerospace manufacturers, and manufacturers of other
Part C 28
470 Part C Automation Design: Theory, Elements, and Methods
materials that require curing are increasing their capital
expenditure budgets for the development and/or acqui-
sition of improved autoclave manufacturing capabilities
to meet this demand head-on.
Composite curing is accomplished through the
proper application of heating and cooling to composite
material inside autoclaves or automated ovens. De-
pending upon the type of composite material or the
application of the composite material, a different set of
curing parameters is used to control the curing process.
Composite materials are cured under very stringent
specifications, especially for materials that are used for
aerospace applications. Ifcomposites are curedat atem-
perature that is too high, the material could become
brittle and will be susceptible to breaking. If cured at
a temperature that is too low, the material may not bond
correctly and will eventually come apart.
The specifications that govern the curing process
for composite materials are called recipes or profiles.
Recipes/profiles differ slightly for an autoclave that has
convection heaters versus an autoclave that has gas
heaters. Likewise, an autoclave that has cryogenic cool-
ers versus an autoclave that is air-cooled or fan-cooled
would have slightly different control parameters within
its control recipe. In the case of autoclave operations
there are, generally, three profiles used to control the
composite curing process: temperature, pressure, and
vacuum. Of these three, temperature is the most im-
portant and the most difficult to control. As seen in
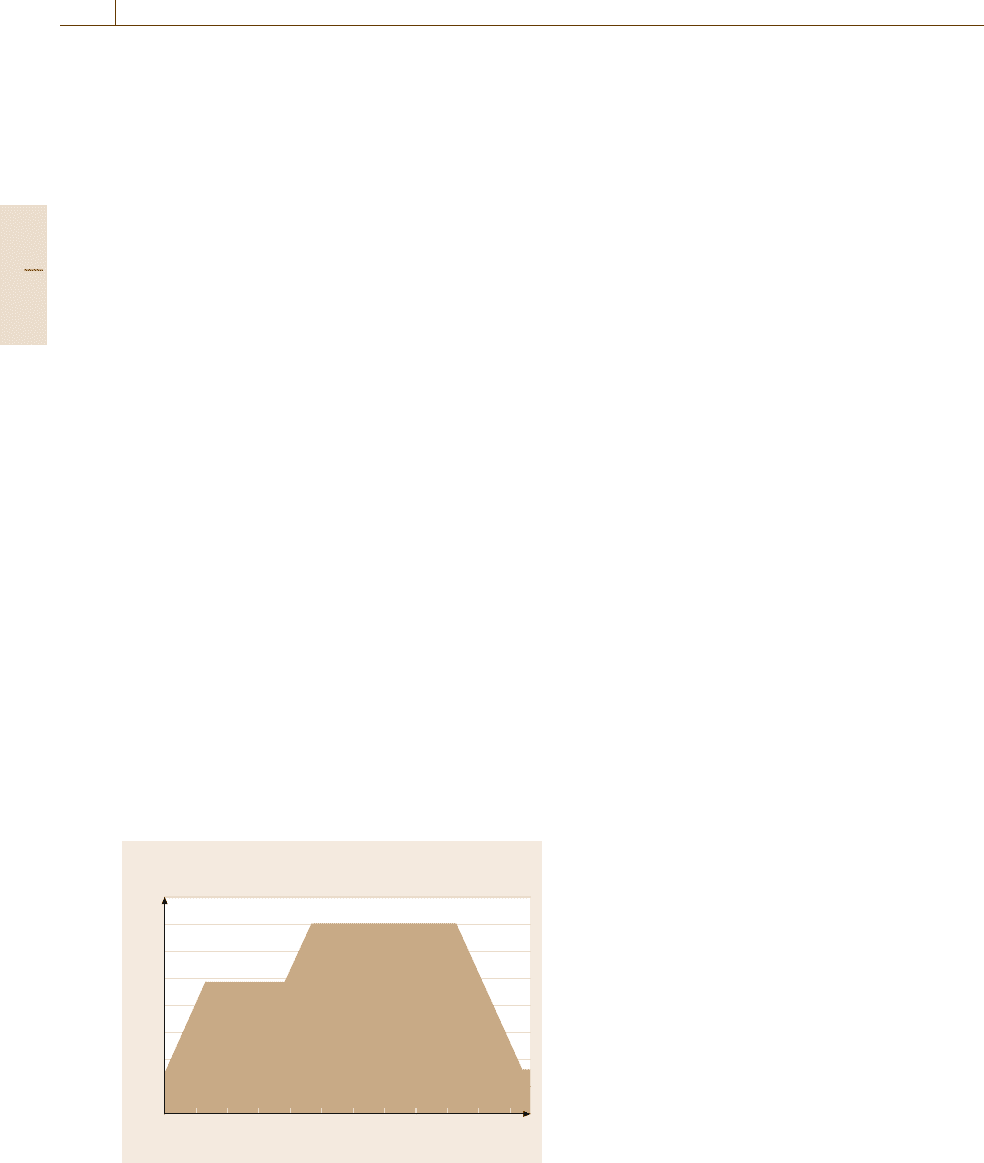
Fig.28.1, six separate periods control the temperature
within the curing autoclave. Temperature increases and
decreases are ramped up or down according to a partic-
ular rate of change (i.e., a slope) that is also regulated
within the specification.
0 27 53 79 105 131 157 183 209 235 261 287
Temperature profile
Temperature (°C)
Time (min)
400
350
300
250
200
150
100
50
0
Fig. 28.1 Typical autoclave temperature profile
State-of-the-art systems use centralized material
management control loops to guide the curing activ-
ity through a prescribed set of thermal, pressure, and
vacuum profiles. Controlling autoclave operations so
that they conform to thermal profiles is the main con-
cern of the system and, hence, dictates the requirements
for system control. For a composite material to bond
properly, temperature throughout an autoclave must be
maintained at a very specific level. Arrays of ther-
mocouples provide temperature readings back to the
control program through output data cards and are used
to controlthe operationof heaters and, sometimes, cool-
ers. One of the challenges of controlling temperature
within theautoclave chamber is tokeep it within a range
of temperature values even when the temperature must
be modified several times during the production pro-
cess (as shown in Fig.28.1). The nonlinear behaviors
of a temperature profile are monitored by a lead ther-
mocouple that is designated based upon its position in
the autoclave, the type of material (or materials) be-
ing cured, chamber idiosyncrasies, and other production
variables.
Whichever thermocouple is selectedas the lead sen-
sor, the feedback temperature data from that sensor will
not be allowed to exceed the temperature profile tem-
perature during heating operations. During the period
of time when the thermal profile specifies a decrease
in temperature (i.e., cooling operations), the lead ther-
mocouple is usually used to determine the minimum
temperature that will be allowed to occur. Naturally,
for this type of control to be effective, network con-
nectivity is critical to maintain high-level material state
control. If a lead thermocouple disconnects from the
composite material while the composite is being cured,
the disconnection must be detected as soon as possi-
ble, and another thermocouple must be selected by the
software to act as the lead. The former lead thermocou-
ple is ignored from that point forward while the curing
process continues. For cooling operations, the thermo-
couple that is used to control the cooling is actually
called the lag thermocouple and temperatures are not
allowed to go below that of the lag sensor.
On the surface of thiscontrol application, it doesnot
seem that the requirements would be difficult to accom-
plish through ordinary ladder logic routines. However,
there is a commercial issue that takes precedence over
the control issue. Millions of dollars of composite ma-
terials could be lost during one imperfect curing process
run. The survivability of the curing session must be en-
sured with greater probability despite perturbations in
the production process.
Part C 28
Distributed Agent Software for Automation 28.1 Composite Curing Background 471
Classical control methods suffice to monitor and
control the thermal process within the autoclaves.
Although the curing activity is performed in a con-
trolled environment, there are dynamic perturbations
that affect the thermocouples, which could generate
unsatisfactory results, provoking complete rejection of
an expensive piece of composite material. Perturba-
tions of interest relate to potential malfunctioning in
the thermocouple themselves. A malfunctioning ther-
mocouple may appear healthy on visual inspection
but its internal operations may be faulty. This is the
case when thermocouples generate bogus readings.
This type of problem is very difficult to detect offline
and is not detected until the curing process has un-
dergone several steps. Classical control programs that
reside in the controller have limitations in terms of
enabling enough reasoning to detect such problems
early.
Another type of problem occurs when thermo-
couples detach from the material during curing. The
autoclave is a sealed controlled environment that cannot
be easily interrupted to reattach the sensors. The con-
troller must be capable of reacting to the failing reader
by performing corrective actions on the fly without dis-
rupting operation.
A viable solution to the problem above is to aug-
ment the reasoning capability of the control system
with more sophisticated reasoning algorithms. These
augmented algorithms follow the process to generate
a model from it. Condition monitoring rules can then
be added to detect malfunctioning sensors. Typically, in
industrial implementations, such advanced capabilities
are placed in the personal computer (PC)level.APC
workstation is added to supervise the control system.
This approach converts the solution into a centralized
system. A centralized system suffers from other prob-
lems such as single point of failure and connectivity
issues, which exacerbate the problem of maintaining
a robust system for the whole duration of the process.
Current trends in industry and industrial techniques
show a strong tendency to move away from centralized
supervisory models.
The endeavor in this work is to show a new tech-
nique to cope with the issues above. A programmable
logic controller (PLC) can be designed with agent
capabilities to enable for advanced reasoning at the
controller level. Agents are software components that
encapsulate physical equipment knowledge (rules) and
properties in the form of capabilities, behaviors, and
procedures [28.1–3]. The capabilities express the type
of functions that an agent contributes to the well-being
of the system. Each capability is a construct of behav-
iors. Moreover, each behavior is made of sequentially
organized procedures. In the example, the agents are
seamless integrated with the control algorithm inside
the PLC.
The fundamental technical milestone is to eliminate
the connectivity problem, and to augment the reconfig-
uration of the control system by moving the condition
monitoring capabilities closer to the physical process,
into the PLC. The PLC is the core of the control op-
eration and therefore these devices have been widely
adopted in industrial automation with the necessary re-
dundancy to prevent losses.
The intention is to show fundamental aspects of
the agent-based control technology to solve a particular
composite curing application.The technologydiscussed
is intended for general use; it is possible to use the same
infrastructure to solve different applications.
The discussion will begin with a little bit of back-
ground about curing technology. Then, industrial agent
technology will be discussed. The chapter concludes
with an example and discussion of results on how to
model the curing application with intelligent agents.
28.1 Composite Curing Background
There are several markets in which large growth in
demand for autoclave cured products and materials
is forecast. The carbon fiber composites market has
been experiencing a growth of 12% during the last
23years and is expected to grow to US$12.2 billion
by 2011 [28.4, 5]. Carbon fiber reinforced thermo-
plastics will be improved by 37% between 2006 and
2010 [28.6].The opportunities for continuous fiber rein-
forced thermoplastic composites are likewise increasing
at a strong rate of growth. During 2002 alone, the
growth rate was 93% [28.7,8]. The aircraft maker Air-
bus has projected increases of thermoplastic composite
use of 20% per year.
The natural rubber market is also seeing higher
demands for its products. Rubber products have the
second largest need for autoclave curing production
improvements. Higherdemands for natural rubber prod-
ucts are largely due to the spectacular economic growth
Part C 28.1
472 Part C Automation Design: Theory, Elements, and Methods
in the People’s Republic of China (PRC) and greater
demand for consumer as well as industrial products.
Production levels just within Thailand have risen from
1.805million tons in1995 to 2.990 million tons in 2005.
Actual production exceeded 1995 demand projections
by 6.25% in 2000 and 40.05% in 2005. By 2010, it is
expected that 3.148million tons of natural rubber will
have to be produced. This will be more than 63% than
was originally thought to be needed in 1995.
There have been many technical and scientific
papers published recently that address many differ-
ent methods of curing within an autoclave. In 2004,
Salagnac et al. sought to improve the curing pro-
cess through heat exchanges that were mainly free
convection and radiation within a narrow-diameter
autoclave [28.9, 10]. Transient thermal modeling of
in situ curing during the tape winding of compos-
ite cylinders was attempted and successfully executed
by Kim et al. at the University of Texas at Austin
in 2002 [28.11]. Chang et al. studied the optimal de-
sign of the cure cycle for the consolidation of thick
composite laminates in 1996 at the National Cheng-
Kung University in Taiwan [28.12]. Smart autoclave
processing of thermoset resin matrix composites that
were based upon temperature and internal strain mon-
itoring was studied by Jinno et al. in 2003 [28.13].
Their work looked at the control of temperature
ramp rate so that the peak temperature predicted by
Springer’s thermochemical model is kept below an al-
lowable value. Cure completion was determined by
a cure rate equation, and internal strain monitoring
with embedded optical-fiber sensors [28.13]. In 2003,
a report was performed by Mawardi and Pitchumani
at the University of Connecticut [28.14]. Their work
was depicted as the development of optimal temper-
ature and current cycles for the curing of composites
using embedded resistive heating elements. Heating
and cooling was controlled internal to the mater-
ials rather than through external heating and cooling
equipment.
To get to a better understanding of the cur-
ing process Thomas et al. performed experimental
characterizations of autoclave-cured glass–epoxy com-
posite laminates at Washington University in St. Louis,
MO [28.15]. From the results of over 100 experimental
autoclave curing runs in 1996, the study team sought
to verify shrinking horizon model predictive control
(SHMPC) to predict and control the thickness and void
content of their composite materials. At the Korea Ad-
vanced Institute of Science and Technology, Kim and
Lee reported the results from their experiments with
composites to reduce fabrication thermal residue stress
of hybrid co-cured structures through the use of dielec-
trometry [28.16]. Ghasemi-Nejhad reported in 2005 his
method of manufacturing and testing of active com-
posite panels with embedded piezoelectric sensors and
actuators [28.17]. The embedded sensors and actuators
were used to minimize the problems associated with
layering composites such as voids and weak bonds.
Pantelelis et al. of the National Technical University of
Athens presented a computer simulation tool in 2004
that was coupled with a numerical optimization method
developed for use in the optimal design of cure cy-
cles in the production of thermoset-matrix composite
parts [28.18]. The presenters, Georg et al. from Boe-
ing, Madsen and Teng from Northrup Grumman, and
Courdji from Convergent Manufacturing, discussed the
exploration of composites processing and producibility
by analysis [28.19]. The discussion centered predomi-
nately on accelerated insertion of materials-composites
(AIM-C) processing and producibility modules and the
results thatcould beachieve bylinking itwith the robust
design computation system (RDCS). AIM-C was being
conducted jointly by the Naval Air Systems Command
(NASC) and the Defense Advance Research Projects
Agency (DARPA). In particular, AIM-C sought to sig-
nificantly reduce the time and cost of inserting new
materials.
For more than 10 years, the University of Delaware
has been formulating advanced curing controls in its
Department of Chemical Engineering and Center for
Composite Materials.A team consisting of Pillai, Beris,
and Dhurjati developed an expert system toolin 1997 to
operate an autoclave for the intelligent curing of com-
posite materials [28.20]. At the same facility in 2002,
Michaud et al. developed a robust, simulation-based
optimization and control method methodology to iden-
tify and implement the optimal curing conditions for
thick-sectioned resin transfer molding (RTM) compos-
ite manufacturing [28.21].
To get better validation results for the curing pro-
cess, Arms et al. developed a technique for remote
powering and bidirectional communication with a net-
work of micro-miniature, multichannel addressable
sensing modules [28.22]. Use of the embedded sensors
sought to eliminate the damage that is commonly in-
curred when removing thermocouples from composite
materials in the post-curing phase of production. Urya-
sev and Trindade also studied methods to achieve better
validation results and settled on a method combining an
Part C 28.1
Distributed Agent Software for Automation 28.2 Industrial Agent Architecture 473
analytical model and experimental test data for optimal
determination of failure tolerance limits [28.23].
Alternative curing schemes are also being devel-
oped. Electron beam (EB) curing is a technique that
researchers at Acsion in Manitoba, Canada say could
have a massive impact in the aerospace and defense
industries, especially for the composite materials used
in aircraft wings [28.24]. In electron beam curing, the
incoming high-speed electrons knock off other elec-
trons in the polymer resin, causing the material to cure.
X-rays generatedfrom the high-energy beams canpene-
trate even deeper into the composite, yielding a uniform
cure in material several centimeters thick. The process
takes only minutes compared with hours for conven-
tional autoclave curing. Eight independent studies have
shown potential manufacturing cost savings of 26–65%
for prototyping alone. This could rise to as much as
90–95% [28.24]. The National Aeronautics and Space
Administration (NASA) encouraged the advancement
of the EB curing process through a small business
innovation research (SBIR) grant awarded to Science
Research Laboratory (SRL), Inc. As a result of the work
conducted, a new curingmethod was producedthat used
automated tape placement with the electron beam. The
new method is known as in situ electron beam curing
and the SRL-devised system is being utilized at the
NASA Marshall Space Flight Center [28.25].
Commercial interests have been developing other
methods and products to supplement the curing con-
trols that have already been put into use in the factory.
The Blair Rubber Company of Seville, OH has devel-
oped very precise process specifications for vulcanizing
rubber products in curing autoclaves. Multichannel
communications modules are in common use with
thermocouples. In particular, Data Translation, Inc.
has universal serial bus (USB) thermocouple measure-
ment modules that can monitor several thermocouple
devices simultaneously. Flexible thermocouple man-
agement programs have been developed to minimize
the costs associated with thermocouple wear and tear.
Thermocouples are reworkedand/or recalibratedand re-
turned to service through this type of program. Other
thermocouple management programs are involved with
manual and automatic device slaving, intelligent ther-
mocouples that protect against ground fault current,
automatic compensation, and automatic swapping of
lead thermocouples [28.26–30].
Even the design and manufacture of thermocou-
ples has become specialized. Customized wiring is
provided within thermocouples by manufacturers de-
pending upon the industrial application and/or the
environment in which the sensors will be placed. Within
autoclave-based composite applications, there are at
least seven types of thermocouples.
28.2 Industrial Agent Architecture
Industrial agents have been designed to execute on pro-
grammable logic controllers (PLCs). The agents are
built on workstations, compiled, and then downloaded
to the PLCs [28.31–33]. The downloading of the agents
is directed by central management software that exe-
cutes an agent assignment script. A decision was made
to expand the PLC firmware to enable for the program-
ming of advanced decision-making engines.
The agents have three main parts:
1. Reasoning
2. Data table interface
3. Execution control.
The first part is the actual brain of the agent.
The brain is composed of behaviors, which execute as
needed, as prescribed in the process operations. Dy-
namically generated events trigger the execution of
behaviors in the agent to follow a particular sequence of
procedures. An industrial agent is essentially reactive,
but its software infrastructure permits the incorporation
of proactivebehaviors.The datatable interface serves as
the repository of control and agent data. The reasoning
part sets values in the data table to estimable the control
loops. The control part is the control execution level.
This part is in charge of executing control loops in a pe-
riodic or continuous fashion to maintain steady-state
conditions during the execution of the operations.
As shown in Fig. 28.2, a hierarchical library of
interrelated agents represents the composite curing ap-
plication. Each node of the library corresponds to an
agent of a given type such as a thermocouple or auto-
clave. Each agent will expose a set of user-configurable
attributes to give it a personality and operational ranges.
The interagent communication is based on the FIPA
(Foundation for Intelligent Physical Agents) [28.34]
language specification. The content of the agent
message is written in a job description language
Part C 28.2
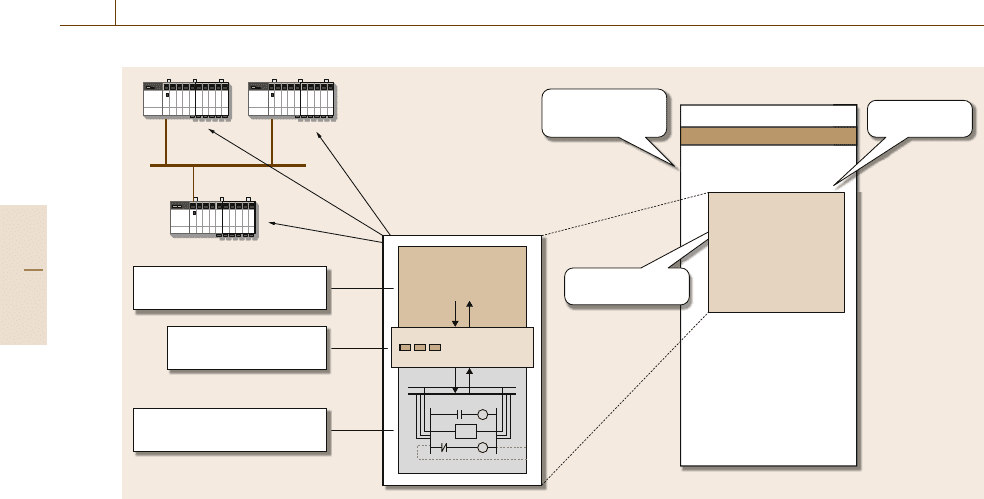
474 Part C Automation Design: Theory, Elements, and Methods
Hierarchical
structure
Agent
Attributes
Reasoning
C
2+
/Java
Interface
IEC-61131
Talks IEEE-FIPA over
Ethernet/IP and ControlNet
Data table holds I/0
symbols
Talks common information
protocol (CIP)
PLCs
Composite curing system
Curing
Autoclave01
Cooler
Heater
TC07...
TC08...
TC09...
TC10...
TC11...
TC12...
TC13...
TC14...
TC15...
Fig. 28.2 Industrial agent components. CIP – common information protocol
(JDL) [28.31–33]. The industrial platform is based on
Rockwell Automation’s PLCs and NetLinx networking.
28.2.1 Agent Design
and Partitioning Perspective
The benefits of using agents can be observed in three
main technological aspects:
1. System design
2. Upgrading
3. Runtime.
For an appropriate system design technique, the ef-
fects of changing components (adding, removing, and
altering) must be measured. The agent technology pro-
vides new techniques todesign truly distributed systems
by using libraries of functionality where the designers
specify the components and their corresponding be-
haviors in generic terms. The libraries of functionality
augment the system design capabilities by eliminating
the need to redesign the whole system when changes
are made.
System upgradability is traditionally a difficult task
in industrial systems due to the hard-coupled dependen-
cies among the controlled components (tightly coupled
systems). In a nonagent system, the logical dependen-
cies among the components must be hard-coded into
the software during design time. Therefore, the ef-
fect of changing one component cascades throughout
the system, forcing the modification of other com-
ponents, and so on. In an agent-based system, one
attempts to eliminate this cascading effect by emphasiz-
ing loosely coupled relationships among the controlled
components. Agents generatedynamic interconnections
with counterparts via agent messages. The dynamically
emerging interconnectivity effects the agents’ behaviors
by locally changing their world view.
The runtime perspective of agent-based systems is
helped by the agent’s capability (or service) of in-
frastructure discovery. Using the dynamic discovery
infrastructure, an agent can initiate the discovery of
other agents than can help in responding to a par-
ticular event. As opposed to having a specific set of
predefined plans or agents to talk to under particular cir-
cumstances, the agents opt to discover their associates
that can currently supply a solution. This distributed
nature of agent technology opens the door to creating
a more survivable system by eliminating single points
of failure.
A very significant aspect of the agent-based control
technology is system scalability. An agent solution can
be scaled up and down to fit different system sizes.
A powerful feature of agents is the ability for
interagent communications to detect, isolate, and ac-
commodate component failures. In the case of a mul-
tithermocouple system, agent-to-agent communication
is directed at validating normative temperature read-
ings. Any variations from the group’s tendency are
Part C 28.2