Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Cleaning Automation 70.1 Background and Cleaning Automation Theory 1255
also be recoverable when cleaning areas that are
inaccessible to humans.
Significant features of these two groups of cleaning
robots are highlighted below.
70.1.1 Floor Cleaning Robots
Without exception, floor cleaning systems utilize
wheel-driven mobile platforms. The configuration of
the wheels varies depending on the case of application
and the maneuverability requirements. Kinematics with
two driven wheels and other caster wheels are often
used.
Sensor systems for obstacle detection and navi-
gation vary widely. Inexpensive infrared or ultrasonic
sensors and contact switches are employed in systems
for household use. The sensor data generated does
not provide a basis for optimized path planning in an
environment and such systems normally change their
direction of travel according to a given algorithm in-
tended to optimally cover a surface. It can be assumed
that theentire areahas been negotiated and cleaned after
an appropriate period of operation.
Floor cleaning systems for professionaluse predom-
inantly contain laser scanners to generate maps and
navigate. In this case, path planning and execution must
be optimized to clean a maximum surface area within
a specific time. Ultrasonic sensors and contact switches
are often employed additionally as collision sensors.
Objects suchas walls, shelves or the like are particularly
challenging when cleaning.On the one hand, safeguards
are needed to prevent people from getting pinned, for
instance, between the cleaning system and a wall. On
the other hand, laser scanners’ capability to generate
precise maps near a shelf is limited. Batteries supply
floor cleaning systems their power. To be cost effec-
tive, a floor cleaning system must be usable over several
hours. The several hours presently required to charge
a battery may hinder professional use. Floor cleaning
systems must furthermore be equipped with efficient
cleaning systems.
70.1.2 Facade, Pool, Ventilation Duct,
and Sewer Line Cleaning Robots
Unlike floor cleaning robots that are normally used
on level ground and equipped with batteries, dust
reservoirs, and water tanks, other cleaning systems
for facades, pools, pipes, sewers, and ducts must be
supplied power through cables and cleaning medium
through hoses and, where necessary, must have a fall
arrester system or a recovery rope. The engineering and
money required to implement these essential compo-
nents, which constitute an indispensable infrastructure,
are quite substantial compared with floor cleaning
systems.
The use of cleaning robots on facades, in pools,
pipes, ducts, and sewer lines may require their adapta-
tion to ambient conditions that are highly unusual for
automated systems and to environments that are less
than ideal for robots. Variable ambient conditions such
as humidity, temperature, and light conditions place
great demands on components and, for example, neces-
sitate adapting and increasing the redundancy of sensor
systems for navigation. Given the high expectations on
system reliability, this is particularly important.
Facade Cleaning Robots
Facade cleaning robots are often remote-controlled sys-
tems that clean surfaces that are inaccessible to humans
or accessible only with great effort. However, isolated
fully automatic systems that operate without human
supervision are also in use, particularly in Europe.
Some of these systems were designed specifically for
a building during its planning phase. Remote-controlled
systems in particular are designed to be universal and
usable on a variety of buildings including their infra-
structures without structural modifications.
Facade cleaning robots come in many different de-
signs: wheel-driven systemsfor flat and slightlyinclined
glass roofs, climbing systems with vacuum cups for
sharply inclined and vertical facades, and rail-guided
systems. As a rule, facade cleaning robots must be able
to navigate obstacles such as window framework and
other facade elements. The use of sensors to deter-
mine position constitutes a particular challenge since
they must deliver reliable data under the widest vari-
ety of outdoor weather conditions from rainto sunshine.
All the facade cleaning robots in operation today have
cables that supply electrical power and, depending on
the system, compressed air, water, and data commu-
nications. There are no known systems that operate
autonomously on facades without an umbilical.Whatis
more, measures often have to be taken to secure a robot
against falling [70.4]. Such measures have to be inte-
grated into the overall concept and, where necessary,
automated for fully automatic systems.
Pool Cleaning Robots
Pool cleaning robots have been in use for some 20years
to clean the bottoms and sides of swimming pools. The
Part G 70.1
1256 Part G Infrastructure and Service Automation
various manufacturers’ products function on the basis
of the same system. A tracked vehicle provides loco-
motion under water. Rotating brushes mounted on the
front and back of the unit loosen dirt, which is then suc-
tioned into a slot on the unit’s underside and pumped
through a filter. The water intake on the underside addi-
tionally increases the contact pressure, thus facilitating
controlled movement on the vertical sides of pools.
Pool cleaning robots use a minimum number of
sensors to orient themselves and move underwater
completely independently. Since pool geometries are
usually simple, navigation logic can also be kept sim-
ple. Simple sensor arrays on the fronts and backs of
these systems are the elements of an efficient cleaning
strategy.
Pool cleaning robots must be lightweight to make
operator handling easy and to attain sufficient buoyancy
for retrieval. Hence, battery operation is often not an
option since it would not allow the necessary clean-
ing performance. Such systems are supplied with power
through a cable with which they can be retrieved in the
event of damage.
Ventilation Duct
and Sewer Line Cleaning Robots
Cleaning systems for pipes, sewers, and ducts represent
a sizeable market since their inaccessibility often pre-
vents humans from being able to clean them without
cleaning automation. Pipe and ventilation duct diam-
eters are too small or areas may be hazardous to health
or potentially explosive, e.g., in the petroleum industry
or sewage disposal.
Thousands of different systems for pipe, ducts, and
sewer line cleaning exist all over the world. As a rule,
they are remote controlled or semiautomatic and move
on wheels or tracks. They normally do not navigate
autonomously and incorporate video cameras to dis-
play their environment to the operator. A cable connects
these systems to a supply and control station. While
this limits the systems’ radius of action, it assures they
are highly reliable, are supplied cleaning medium and
can be recovered from pipes, sewers, and ducts with
certainty. Cleaning methods vary widely depending on
the case of application and include brushes, water, high
water pressure, and dry ice.
70.2 Examples of Application
The automatic systems presented here are established
systems that have achieved product maturity and, for
the most part, been in operation for years. In addi-
tion to special applications for which very few systems
are available worldwide, there are also applications for
which a mass market has already opened. Accordingly,
the systems cited here merely represent a few exam-
ples of the wide range of cleaning automation products.
Space constraints only allow the description of cleaning
systems presently in operation and preclude covering
the multitude of prototype developments and experi-
mental models.
70.2.1 Floor Cleaning Systems
A distinction must be made between professional and
household floor cleaning systems as well as the types of
cleaning, i.e., vacuuming and wet cleaning. The Hefter
ST82 R floor washing robot is an example of profes-
sional wet cleaning, and iRobot’s Roomba of household
vacuuming. While the technical configuration and per-
formance of other manufacturer’s systems differ, the
basic concept is comparable.
ST82 R Floor Washing Robot
Manufacturer: HEFTER Cleantech GmbH,
Germany
Type: Professional floor cleaning
system
Operating mode: Autonomous, taught path
Cleaning technology: Wet cleaning
Area of application: Supermarkets, airports, large
halls, etc.
Based on a standard floor cleaning system, the
Hefter ST82 R floor washing robot is intended for
professional cleaning of hard floors (Fig.70.2). Outfit-
ted with auxiliary localization and collision avoidance
sensor systems, a navigation system and an onboard
computer, the Hefter ST82 R is able to follow and ef-
fectively clean a programmed path fully autonomously
and independently of an operator [70.5].
This cleaning robot can run in two operating modes:
manual and automatic. In manual mode, the system per-
forms like a hand-guided floor cleaning system in order
to teach it the path to be cleaned autonomously and to
recover it in the event it malfunctions.
Part G 70.2
Cleaning Automation 70.2 Examples of Application 1257
Fig. 70.2 Hefter cleaning robot ST82R
Automatic mode is programmed in two stages. The
robot’s entire work space is first navigated in manual
mode. The robot’s onboard navigation software auto-
matically generates a virtual map of the workspace
from the data collected by an odometer, a gyrocom-
pass, ultrasonic sensors, and laser scanners during the
first reference run.
A second reference run is taken afterward. This
time, the intended cleaning route is followed exactly.
A cleaning path based on the sensor data is entered into
the virtual map. A Siemens SINAS navigation system
furnishes the necessary navigation intelligence [70.6].
Once the reference runs have been completed, the
cleaning robot is able to navigate the programmed path
on its own. To do so, the robot is switched to auto-
matic mode. The operator can no longer intervene in
the robot’s movement in automatic mode.
Since the robot moves in peopled surroundings,
a multitudeof safety mechanisms that preventcollisions
with and injuries to people have been provided.
Along with switching strips mounted all over the
robot, a laser scanner installed in the front skirt is an
integral element of the safety concept. If one of the
safety systems is activated, the robot initially reacts by
moving to evade the direction of the source of activa-
tion. If this does not cancel the activated safety system,
then an emergency stop is triggered. Automatic opera-
tion can be resumed only after acknowledgement by an
authorized operator.
In hazardous situations the safety system is unable
to detect, automatic operation can be interrupted by ac-
tivating emergency stop buttons on the robot.
The Hefter ST82 R floor washing robot system was
successfully tested in various retail stores but is no
longer available for purchase.
Floor cleaning robots from other manufacturers in-
clude:
•
The Hako Acromatic is for autonomous profes-
sional cleaning in buildings (but is no longer
sold) [70.7].
•
Fuji Heavy Industries’ Subaru RFS1 is the succes-
sor to an autonomous floor cleaner sold since 2000.
The latest model communicates with the elevator
and canthus move independently from floorto floor.
It is not designed for manual operation [70.8].
Other systems that at least deserve brief mention
are the Comac CLEAN [70.9], Cybernetix Auror and
Baror [70.10], Thomson Abilix 500 [70.3], Servus
Robots [70.11], CleanFix Robo40 [70.12], Floor-
botics [70.13], Robosoft AutoVac C6 and C100 [70.14],
and VonSchrader Dolphin [70.15], AUTOMAX AXV-
01 [70.16].
Roomba 500 Series Vacuum Cleaning Robot
Manufacturer: iRobot Corporation, USA
Type: Household vacuum cleaning
system
Operating mode: Autonomous
Cleaning technology: Vacuum cleaning
Area of application: Standard rooms in homes.
Vacuum cleaning is one of the few fields of applica-
tion for which a mass market has already opened for
service robots in general and cleaning robots in par-
ticular. The most successful system in this segment is
iRobot’s Roomba robot (Fig. 70.1), which consists of
a cleaning robot and a base station. The circular clean-
ing robot stands atop three wheels, of which two are
drive wheels and one a caster wheel, and navigates an
unfamiliar environment completely autonomously. Es-
sentially, the robot operates automatically [70.17].
In principle, it cleans on the basis of a classical
vacuum cleaner with a powerful vacuuming unit and ro-
tating brushes configured so that even dirt in the robot’s
boundary area is picked up. A dirt detecting sensor is
located in the suction zone.
The path being cleaned does not have to be pro-
grammed. Equipped with optical ranging sensors and
contact sensors, the system detects when it nears an
obstacle, proceeds toward it at reduced speed, and
changes its path direction upon contact. Ranging sen-
sors directed downward detect stairs and drop-offs and
generate a change of path direction as well.
Path direction is not changed randomly. The robot
utilizes sensor data to analyze its environment and se-
Part G 70.2
1258 Part G Infrastructure and Service Automation
lects one of four motion patterns depending on the
situation: spiraling, wall following, room crossing, and
dirt detection.
Dirt detection is selected whenever larger quantities
of dirt are detected in the suction flow. The robot reacts
by increasing suction power and follows a spiral motion
pattern until the quantity of dirt drops again.
Virtual walls can be used to limit the robot’s
workspace. These are generated by stations which emit
an infrared beam. If its battery charge drops below
a critical value or it has finished cleaning, the system
returns on its own to its base station, which emits an
infrared beam that acts as a guide beam for the robot.
Systems from other manufacturers include:
•
The Kärcher RC3000 (Germany) is an autonomous
vacuuming robot for household use (largely similar
in design to the Siemens VSR8000). It is the only
household appliance that disposes of collected dirt
in its docking station [70.18].
•
The Infinuvo Cleanmate QQ2 is an autonomous
vacuuming robot for household use. It additionally
kills germs with an ultraviolet (UV) lamp and fresh-
ens air with fragrance capsules [70.19].
•
The iRobot Scooba (USA) is Roomba’s successor
that not only vacuums but also wet mops [70.17].
•
The Electrolux Trilobite (Sweden) was introduced
as the first vacuuming robot for household use in
2001 [70.2].
Other systems that at least deserve brief mention
are the LG RoboKing, Hanool Ottoro, Black&Decker
ZoomBot, and Sharper Image eVac.
70.2.2 Roofs and Facades
A number of facade cleaning robots have moved well
beyond the research and prototype stage and are being
operated as special developments exclusively on spe-
cific facades. Since relatively little time and effort is
required to adapt remote-controlled systems, they will
quite likely be used on other facades in the near future.
Filius Glass Roof Cleaning Robot
Developer: Fraunhofer IFF, Germany
Type: Professional roof cleaning
system
Operating mode: Remote controlled
Cleaning technology: Wet roof cleaning
Area of application: Berlin Central Train Station,
Germany.
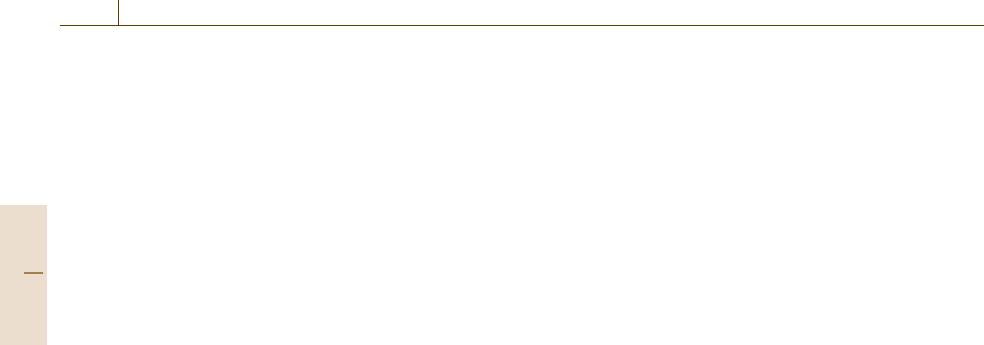
Fig. 70.3 Fraunhofer IFF Filius roof cleaning robot
The Fraunhofer IFF specially developed a remote-
controlled cleaning robot for Berlin central train station
in Germany (Fig.70.3). However, it can also be used
on other roofs with comparable geometries once the
appropriate infrastructure has been installed.
Filius is a remote-controlled, semiautomatic robot
that can navigate obstacles with heights of up to
200mm. Onboard cable winches secure Filius to
a gantry on the roof ridge from which it is supplied with
power and water through a cable and a hose. As clean-
ing progresses, the gantry moves incrementally so it is
always located above the robot.
Dirt is loosened by a rotating brush mounted on the
front, and is then rinsed away by a nozzle bank behind
the brush. An operator assumes the control of action
functions such as path direction and brush activity by
remote control.
Wobble sticks and ultrasonic sensors detect travel
across the roof surface and an emergency stop prevents
operators from driving the robot over the roof’s edge.
Its all-wheel drive makes the robot extremely ma-
neuverable on all terrain. Ramps laid out enable it to
navigate the gantry’s rails and expansion joints between
individualroof areasfor instance.Thus, therobot can be
positioned and used on the entire surface of the station’s
roof.
Feeder lines on the roof,fed with high-pressure soft-
ened water by a supply vehicle, supply water to the
gantry.
RobuGlass Glass Roof Cleaning Robot
Manufacturer: Robosoft, France
Type: Professional roof cleaning
system
Operating mode: Remote controlled
Cleaning technology: Wet roof cleaning
Area of application: Louvre Pyramid (France).
Part G 70.2
Cleaning Automation 70.2 Examples of Application 1259
A remote-controlled robot cleans the glass Lou-
vre Pyramid in Paris, France. Combining suction and
caterpillar tracks, the robot travels up and down the
triangular surfaces. The absence of any overhead se-
curing device is a special feature of the Louvre robot.
Technically, it is designed so that the frictional force
of the walking mechanism suffices to prevent it from
sliding down the sloping surface in the event of a mal-
function. Operators at the foot of the pyramid supply it
from below through cable and hose, the compressed air
needed being provided by equipment located on a sup-
ply vehicle. Rotating brushes do the cleaning and a car
windshield wiper dries the path of travel during down-
ward travel [70.20].
Compared with other facade cleaning robots, the
Louvre system has a very simple design. The mini-
mum of distinctive features of the facade substantially
reduces complexity. First, the triangular surfaces are
completely level, only interrupted by silicone joints.
Consequently, a very simple walking mechanism can
be used since there are no obstacles to be navi-
gated. Second, the system cannot fall when it travels
across the sloping surfaces, thus making an over-
head securing device unnecessary. Safety engineering
accounts for a large part of other facade cleaning
robots’ systems and weight. Third, the sloping smooth
surfaces allow water from cleaning to simply run
off. This simplifies the cleaning system. Fourth, the
space around the pyramid is navigable by a vehi-
cle and the system can be recovered with a small
crane at any time. Its relatively short cleaning paths
enable supplying the robot from below. The requi-
site cables and hoses are simply pulled along the
glass.
Glass Roof Cleaning Robot
for Leipzig’s New Exhibition Center
Developer: Fraunhofer IFF, Germany
Type: Professional roof cleaning
system
Operating mode: Autonomous
Cleaning technology: Wet roof cleaning
Area of application: Entrance hall of Leipzig’s new
exhibition center (Germany).
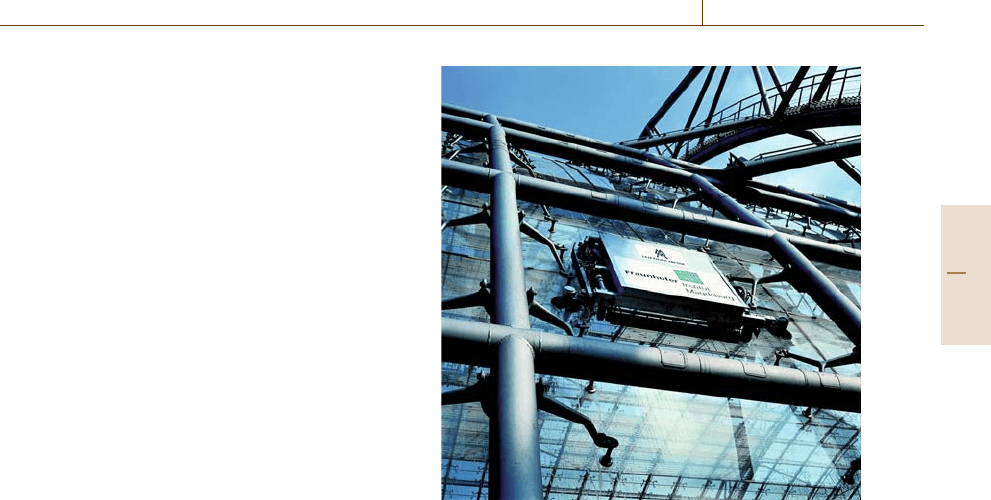
Two fully automatic cleaning robots have been
cleaning the 25000m
2
glass hall of Leipzig’s new ex-
hibition center in Germany since 1997 (Fig. 70.4). The
roof consists of a glass facade suspended from a steel
structure. Accessing it with a gantry alone or other ac-
cess equipment would be extremely complicated.
Fig. 70.4 Fraunhofer IFF cleaning robot in Leipzig
A gantry transports the robots along the roof ridge
and uses small hoists to lower them onto the glass sur-
face between the pane mounts. The robots then move
downward under the steel trusses and between the
mounts, cleaning the glass. Upon returning to the top,
the robots are picked up by the hoists and shifted to the
next path. A broad roller brush cleans the entire surface
of the facade lane by lane, starting at the eastern end of
the roof and ending at the western end. Since the robots
are unable to move around the mounts, these areas are
cleaned by disc brushes on retractable arms. Chemical-
free deionizedwater is sprayedonto the glass to moisten
and wash away dirt mobilized by the brushes.
The gantry on the roof ridge secures each cleaning
robot with two Dyneema ropes and supplies each with
power and water through its own cable and hose. To
prevent damaging the panes of glass and silicone seals,
hose, cable, and securing ropes are coiled and uncoiled
inside a robot and thus laid down on the glass instead
of being dragged over it. Furthermore, since the bearing
wheels are not driven, the two securing ropes are used
to correct the robot’s direction of travel. A fifth wheel
only provides the necessary drive in flat areas.
The steel structure limits the size a robot may have.
At an overhead clearance of 38cm, the robot’s height is
just 30cm. The travel path is 45 m long and runs from
the ridge between the pane mounts down into the eaves.
The distance between mounts limits the robot’s width
to 1.5m.
Part G 70.2
1260 Part G Infrastructure and Service Automation
Odometer measurements of the distance covered by
two wheels are supplemented by eddy-current sensor
measurements of the distance covered using the mounts
as reference marks. In addition, the distance to the
mounts to the robot’s left and right is used to correct
path direction, controlled by adjusting the coiling of the
two ropes. Expansion of the hall due to heat as well as
the general tolerances of the mounts’ uniformity make
navigation between mounts more challenging.
The gantry and robots move fully automatically
and are monitored from a master control room where
exact positions and actions are displayed. The robots
also accept abstract commands from a manual control
menu [70.21,22].
CleanAnt Glass Facade Cleaning Robot
Manufacturer: Niederberger, Switzerland
Type: Professional facade cleaning
system
Operating mode: Autonomous
Cleaning technology: Wet facade cleaning.
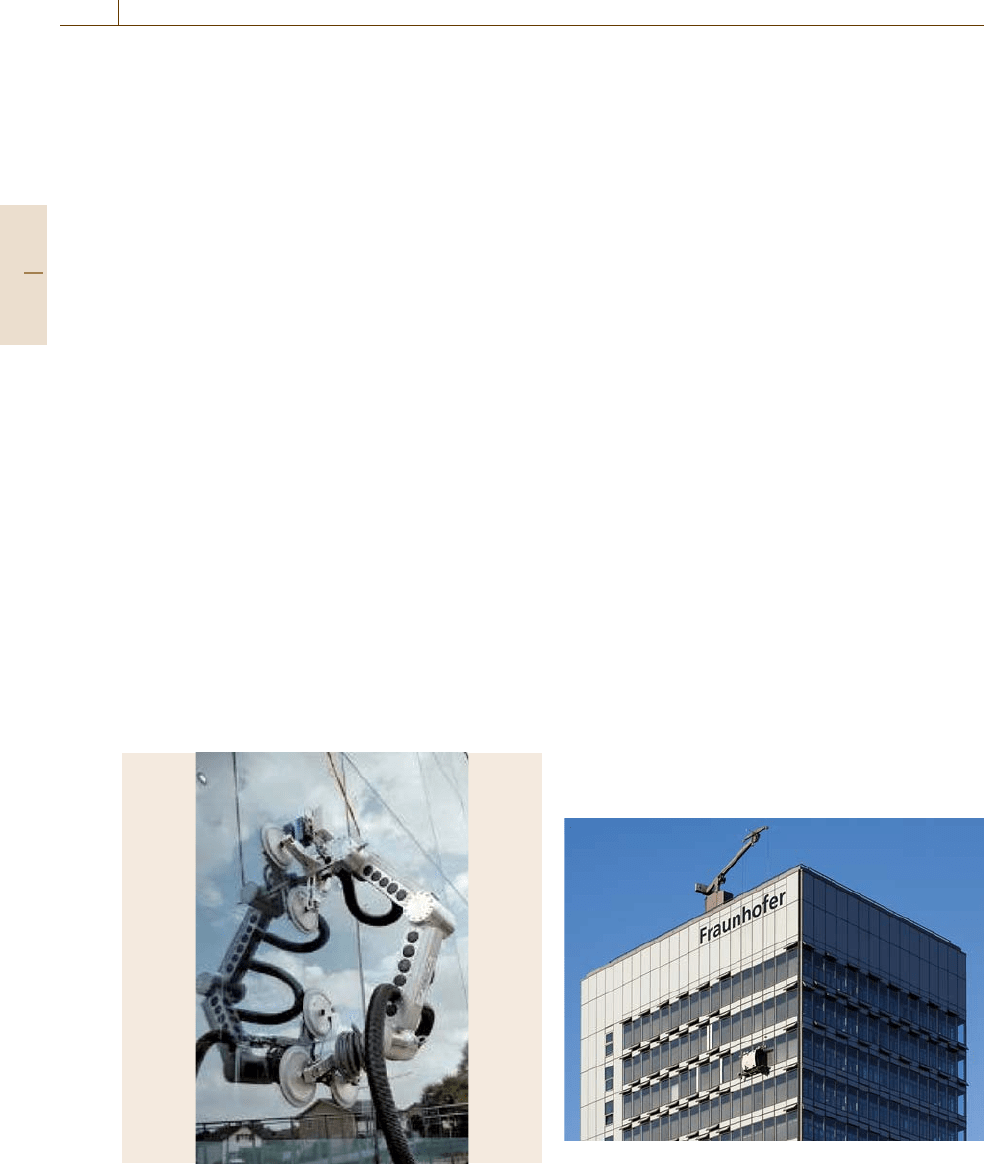
Consisting of two limbs with suction cups attached
to both ends, CleanAnt constitutes a walking kinematics
with five degrees of freedom (Fig.70.5). While one foot
is fixed on a pane, the second swings into the next walk-
ing position or moves over the surface to clean a pane.
A control computer synchronously controls and posi-
tions the axles, inverse kinematics identical to industrial
robot controls determining the positions of the joints.
Fig. 70.5 CleanAnt climbing robot
However, its base coordinate system changes when the
fixed foot changes.
The system automatically holds itself on the facade
being cleaned, thus making it possible to clean vertical,
overhanging or even curved facades. A slack rope se-
cures the cleaning system and only goes taut should the
system fall, thus preventing it from falling entirely.
Transceiver units on the building’s corners, which
triangulate current position, monitor its position on
a surface. The surface being cleaned is modeled in
computer-aided design (CAD) and uploaded to the
robot control system. The robot then follows a prede-
fined motion path autonomously.
While the complicated walking pattern, the few de-
grees of freedom, and the limited size of the cleaning
unit prevent the system from covering large areas, it
still qualifies as a service robot since it is able to clean
surfaces that would otherwise be inaccessible, i.e., it
can easily clean vaulted surfaces. Moreover, CleanAnt
can move around corners or from wall to ceiling and
navigate larger recesses or obstacles.
Wet brush cleaning and semidry cleaning with
fleece or dry ice can be applied as cleaning technolo-
gies. A hose supplies the requisite media from above
or below. For special operations, CleanAnt can also be
deposited onto a facade manually, e.g., from a gon-
dola, and maneuvered into specific areas by remote
control.
While it is marketed for professional facade clean-
ing, CleanAnt is the only robot cited here that is not
yet in operation. Nonetheless, it deserves mention if
only because its design representssuch agreat departure
from conventional robots [70.1,23].
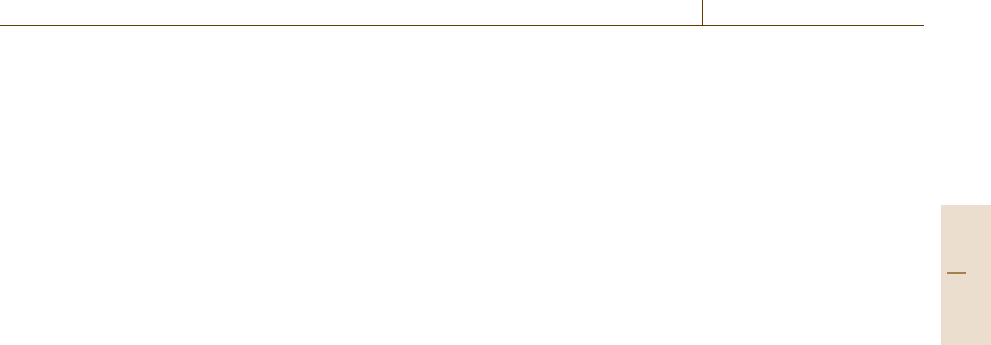
Fig. 70.6 SIRIUSc facade cleaning robot for automatic
cleaning of high-rise buildings
Part G 70.2
Cleaning Automation 70.2 Examples of Application 1261
Other facade cleaning robots include:
•
The Fraunhofer IFF’s SIRIUSc cleaning the vertical
facades of the Fraunhofer-Gesellschaft’s headquar-
ters in Munich, Germany (Fig. 70.6) [70.22,24,25]
and
•
Beihang University’s SkyCleaner III in operation on
the Shanghai Science and Technology Museum in
China [70.26].
70.2.3 Ducts and Sewer Lines
Regular cleaning of sewer lines isa basic measure toen-
sure they operate reliably. Cleaning of ventilation ducts
on the other hand is not essential to operational relia-
bility but arguably to protect people’s health. Although
sewer lines and ventilation ducts have similar geometric
properties, the boundary conditions for cleaning robot
operations differ fundamentally. Two systems serve as
examples of ventilation duct and sewer line cleaning
respectively.
Multipurpose Duct Cleaning Robot
Manufacturer: Danduct Clean, Danmark
Type: Professional duct cleaning sys-
tem
Operating mode: Remote controlled
Cleaning technology: Brushes, dry-ice cleaning
The Danish company Danduct Clean’s multipurpose
robot is a universal system that cleans and inspects ven-
tilation ducts. An all-wheel drive robot platform serves
as the carrier system. The overall system does not have
any collision sensors. However, two cameras directed
toward the front and the rear relay a direct impression
of the robot’s environment. The carrier system is out-
fitted with different cleaning systems depending on the
case of application.
Rotating brushes are used in dry ventilation ducts
to remove dust clinging to the walls. Various brush
systems are available depending on the duct geome-
try. A dry-ice cleaning system is employed in exhaust
areas of kitchens and the like where sizeable grease de-
posits form in ventilation ducts. Temperatures as low as
−79
◦
C facilitate their removal.
Irrespective of thecleaning systemused, cableswith
lengths of up to 30m supply media and transmit data to
an external control box. The robot is controlled from
the control box by joystick based on camera feedback.
Cruise control is additionallyavailable for long, straight
duct sections.
To effectively remove loosened dirt, inflatable
balloons seal off the duct section being cleaned. A pow-
erful suction unit is hooked up to the duct opening in
the direction of work and extracts loosened dirt from
the duct [70.27].
Other duct cleaning robots are manufactured by:
•
Indoor EnvironmentalSolutions, Inc.(USA) [70.28]
•
DRY ICE Engineering GmbH (Germany) [70.29]
•
HANLIM MECHATRONICS(South Korea)[70.30].
Sewer Cleaning Robot
Developer: Fraunhofer IFF, Germany
Type: Professional sewer cleaning
system
Operating mode: Automatic
Cleaning technology: High pressure.
Isolated sewer cleaning robots exist for inaccessible
sewer lines. Some remote-controlled inspection robots
for small sewer line diameters can be outfitted with
high-pressure nozzles. As a rule, however, small sewer
lines are cleaned with cleaning nozzles that utilize high-
pressure water for propulsion.
Contracted by the Emschergenossenschaft in Ger-
many, the Fraunhofer IFF developed a fully automatic
cleaning robot for sewer lines with diameters of
1600–2800 mm. The system employs an ejector nozzle
to mobilize deposits that are underwater and high-
pressure water to clean the pipe wallabovethe waterline
in sewer lines that are 20–40% full at all times. The
system can clean sewers up to 750m in length. The
wheel-driven cleaning system is roughly 4m long and
weighs 2.5t.Anultrasonic scanner monitors the clean-
ing results underwater and a camera monitors the area
above water. A specially equipped vehicle on the street
level supplies the cleaning system with up to 250l
of water per minute over a distance of up to 750m
with a nozzle pressure of over 100bar. The clean-
ing system dependably navigates in the sewer line and
system recovery is ensured through the cable connec-
tion [70.22,31].
70.2.4 Swimming Pools
Swimming pools accumulate large quantities of dirt
on a daily basis. The relatively large surfaces gather
dirt out of the air and off swimmers. Public swim-
ming pools are subject to hygiene codes with strict
water quality limit values that necessitate regularly
cleaning the bottom and walls of a pool. Underwa-
Part G 70.2
1262 Part G Infrastructure and Service Automation
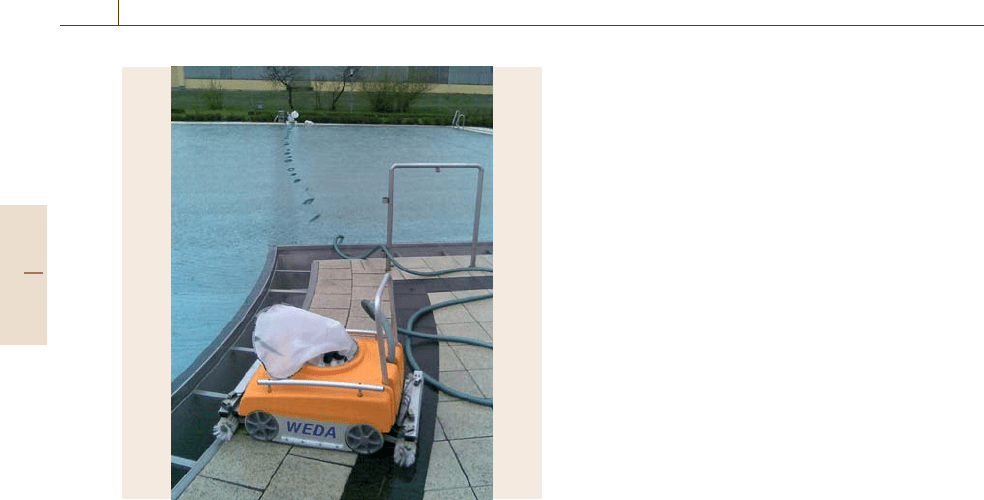
Fig. 70.7 WEDA B680 pool cleaning robot
ter cleaning machines have been in use since the
1970s. Such pool cleaners qualify as service robots
since they move and systematically navigate pools au-
tonomously. While the various manufacturers’ systems
share virtually the same robot engineering concept,
their designs, target markets, and cleaning systems
differ.
B680 Pool Cleaning Robot
Manufacturer: Weda, Sweden
Type: Professional pool cleaningdiffer
system
Operating mode: Autonomous, remote controlled
Cleaning technology: Brushes, water filter system.
The base of Weda’s B680 pool cleaning robot is
a tracked vehicle maneuverable by separately control-
ling its left and right track (Fig.70.7). Its forward speed
is approximately 0.25m/s. A water pump suctions in
approximately 1200l of water per minute on the un-
derside and rinses it through a reusable particle filter.
Common systems for residential use only manage ap-
proximately 250l/min. The suction generated beneath
the system is sufficient to enable the pool cleaner to tra-
verse vertical walls underwater. Rotating brushes loosen
dirt particles in front of and behind the unit, moving
them in the direction of the suction opening. Power is
supplied by a cable connected to a base station on the
edge of the pool. It is uncoiled and floats on the surface
during cleaning.
The robot is internally balanced in such a way that
it glides gently downward and lands on its feet when
loweredinto a pool or when it detachesfrom a side wall.
Electronics in the B680 were kept to a minimum so
that the unit is as easy for users to understand as possi-
ble. Contact sensors to the front and rear of the robot are
used for navigation and reverse the drive directionwhen
pressed. The unit has a slightly oblique front bumper
that generatesthe slight change in direction when it con-
tacts a pool wall. As a result, it reaches the opposite end
of itspath onits return travelsomewhatoffset.This sim-
ple navigation technique enables the complete cleaning
of rectangular pool surfaces quicker than through ran-
dom motion.
A pool cleaner is placed in the water during a pool’s
off hours and activates itself with a time switch after
a short wait, by which time the water has calmed and
dirt particles have settled. The cleaning is finished in
a few hours and the unit deactivates itself for retrieval
from the water the next morning. Control keys execute
the requisite maneuver. The filter bag size is dependent
upon its planned hours of operation. If it is too small, it
clogs quickly, thus diminishing cleaning performance.
In such a case, the cleaning robot would merely be em-
barking on a joyride and would lose traction as suction
decreases [70.32].
Other manufacturers of professional and household
pool cleaning systems include:
•
Maytronics’ (Israel) pool robots are intended for
residential use and smaller pools. Maytronics
offers the only battery-powered robot. Maytron-
ics products are marketed globally under various
names [70.33].
•
iRobot (USA) offers several models that suction up
and filter dirt in water [70.17].
•
Aquatools (USA) offers robots for residential use
and smaller public pools.
•
Mariner 3S (Switzerland) sells professional pool
cleaners. Instead of collecting bags, some units use
filter cartridges that are cleaned afterward with aux-
iliary equipment [70.34].
Part G 70.2

Cleaning Automation References 1263
70.3 Emerging Trends
Especially in the domain of cleaning, service robots
already provide many different options for relieving
people of dangerous, stressful, and/ormonotonous work
and are penetrating both household and professional
market sectors. Household systems have technically
simple and low-cost designs and are already being sold
in large numbers. Professional systems are technically
complex, flexible, cost effective, efficient, and easy to
operate. However, since they fail to fulfill the requi-
site criteria in many cases, they have not yet established
themselves as mass products. Nevertheless, numerous
individual solutions exist for special applications such
as facade or pool cleaning.
To the extent that they do not fully navigate
surfaces whengeometries are more complex or environ-
ments are dynamic and generally can neither navigate
themselves nor coordinate tools better than humans,
professional cleaning robots’ sensory and cognitive
capabilities continue to limit their universal and cost-
effective use.
Such cleaning robots will not become mass prod-
ucts until their cost effectiveness, performance, ef-
ficiency, and total attendant costs make them su-
perior to manual cleaning. Further development of
service robots’ cognitive capabilities, environment
modeling sensor systems, and multimodal user in-
terfaces is being pursued worldwide for other fields
of application and is a fundamental prerequisite to
establishing cleaning robots in the professional sec-
tor.
References
70.1 R.D. Schraft: Service Robots (B&T, Munich 2000)
70.2 IFR: World Robotics Report 2006 (International Fed-
eration of Robotics IFR, 2006),
www.worldrobotics.com, last cited 2009
70.3 E. Prassler, A. Ritter, C. Schaefer, P. Fiorini: A short
history of cleaning robots, Auton. Robot. 9, 211–226
(2000)
70.4 S. Hirose, K. Kawabe: Ceiling walk climbing robot
Ninja-II, 1st Int. Symp. Mobile, Climb. Walk. Robots
(Brussels 1998) pp. 143–147
70.5 U. Zechbauer: Der elektronische Saubermann, Pict.
Future (Herbst), 59–61 (2002), in German
70.6 G. Lawitzky: A navigation system for cleaning
robots, Auton. Robot. 9(3), 255–260 (2000)
70.7 M. Schofield: Neither master nor slave, 7th Int.
Conf. Emerg. Technol. Fact. Autom., Vol. 2 (IEEE,
Piscataway 1999) p. 1427
70.8 H. Aoyama: Building cleaning robot system, 1st
German-Japanese Summit Mobile Auton. Syst.
(Hannovermesse 2008)
70.9 Comac: Verona, Italy (2008) www.comac.it
70.10 Cybernetix: Marseille, France (2008)
www.cybernetix.fr/
70.11 Intellibot: Pittsburgh, USA (2008)
www.intellibotrobotics.com
70.12 Cleanfix: Cleaning Systems, Wyckoff, ISA (2008)
www.cleanfixusa.com/cleanfix-site/robo40.php
70.13 Floorbotics: Northcote, VIC, AUS (2008)
www.floorbot.com/
70.14 Robosoft Advanced Robotics Solutions, Bidart,
France (2008), www.robosoft.fr
70.15 Von Schrader: Racine, USA (2008)
www.vonschrader.com/equipment/carpet/
dolphin/dolphin.htm
70.16 The Specifications and Applications of Robots in
Japan – Non-Manufacturing Fields (Japan Robot
Association, Tokyo 1997) pp. 328–329
70.17 iRobot: Roomba (iRobot, Bedford 2008),
www.irobot.com
70.18 Kärcher: Winnenden, Germany (2008)
www.karcher.com
70.19 Infinuvo: San Jose (2009) www.infinuvo.com/
70.20 A. Kochan: Robot cleans glass roof of louvre pyra-
mid, Ind. Robot 32, 380–382 (2005)
70.21 N. Elkmann, U. Schmucker, T. Boehme, M. Sack:
Service robots for facade cleaning, advanced
robotics: Beyond 2000, 29th Int. Symp. Robot.
(Birmingham 1998) pp. 373–377
70.22 Fraunhofer IFF: Magdeburg, Germany (2008)
www.iff.fraunhofer.de/en/robotersysteme.htm
70.23 Serbot: Oberdorf, Switzerland
www.serbot.ndswing05.ch/ (2009)
70.24 N. Elkmann, D. Kunst, T. Krueger, M. Lucke,
T. Boehme, T. Felsch, T. Stuerze: SIRIUSc – facade
cleaning robot for a high-rise building in Mu-
nich, Germany, Proc. 7th Int. Conf. CLAWAR 2004
(Springer, 2004) pp. 1033–1040
70.25 N. Elkmann, D. Kunst, T. Krueger, M. Lucke,
T. Stuerze: SIRIUSc: fully automatic facade cleaning
robot for a high-rise building in Munich, Ger-
many, Proc. Jt. Conf. Robot. ISR 2006/Robotik 2006
(Munich 2006) pp. 203–204
70.26 H.Zhang,J.Zhang,W.Wang,R.Liu,G.Zong:Sky
cleaner 3 – a real pneumatic climbing robot for
glass-wall cleaning, IEEE Robot. Autom. Mag. 13(1),
32–41 (2006)
70.27 Danduct Clean: Herning, Denmark (2008)
www.danduct.com
Part G 70
1264 Part G Infrastructure and Service Automation
70.28 Indoor Environmental Solution: Houston, USA
(2008) www.cleanducts.com/
70.29 Dry Ice Engineering: Mainhausen, Germany (2008)
www.dryiceclean.de
70.30 Hanlim Mechatronics: Gyungki-Do, Korea (2008)
www.ductrobot.co.kr/en/page2.html
70.31 N. Elkmann, H. Althoff, S. Kutzner, J. Saenz,
T. Stuerze, C. Walter, E. Schulenburg: Automated
inspection system for large underground concrete
pipes partially filled with waste water, Proc. Jt.
Conf. Robot. ISR 2006/Robotik 2006 (Munich 2006)
pp. 167–168
70.32 Weda: Södertälje, Sweden (2008) www.weda.se
70.33 Maytronics: Yizreel, Israel (2008)
www.maytronics.com
70.34 3S Systemtechnik: Remigen, Switzerland (2008)
www.mariner-3s.com
Part G 70