Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Space and Exploration Automation 69.2 Challenges of Space Automation 1245
mechanics and planetary atmospheric aerodynamics are
reasonably well understood and well behaved in space.
For surface rovers, the interactions between their mo-
bility systems and planet surfaces are complex and
sometimes further complicated by reduced-gravity ef-
fects. The result is nondeterministic behavior as the
system interacts with the world and increased uncer-
tainty in how the autonomous mobility system will
respond to operational commands. As such, mobility
and navigation problems for rovers are characterized
by high levels of difficulty and increased measurement
uncertainty. Common mobility and navigation sensors
often inadequately handle the tremendous variability
of surface features and properties of natural terrain.
Advanced sensing and perception techniques are of-
ten required for detection or measurement of significant
wheel–terrain interactions such as slippage and sink-
age, and assessment or measurement of certain terrain
properties prior to engagement by the rover.
Robotic Manipulation
Mechanical manipulators or arms with multiple de-
grees of freedom are useful on a variety of robots
operating in space, on-orbit, and on planet surfaces.
They include fixed-base manipulators on space shuttles,
space stations, landers, and rovers as well as manipu-
lation appendages on free-flying robots. Robotic tasks
for this variety of systems may require fine positioning
and dexterous manipulation of equipment or the en-
vironment. In order to accomplish manipulation tasks,
robots typically execute closed-loop feedback control
of arms/mechanisms, with the essential feedback pro-
vided by appropriate sensors. Further considerations
for achieving reliable manipulation include avoiding
collisions of the manipulator with the robot itself,
avoiding unintended contact with the environment, and
controlling forces during intended contactwith theenvi-
ronment. Oftentimes, it is also necessary to compensate
for errors associated with degradations and/or changes
in the manipulator hardware due to environmental fac-
tors such as spacecraft launch/landing vibrations and
material thermal expansion, which can affect the abil-
ity to accurately position a manipulator at a target of
interest. Sensing solutions that provide adequate cover-
age and resolution for both gross and fine manipulation
are essential for missions requiring object handling and
transport, servicing/repair, assembly/disassembly, sam-
ple acquisition, and in situ acquisition of scientific
measurements. Additional information on robotic ma-
nipulation, and automation mobility and navigation can
be found in Chap.16.
Wheel Slip and Sinkage
Wheeled mobility systems are subject to undesirable
wheel–terrain interactions that cause wheels to slip on
rocks and soil. Frequent loss of traction due to wheel
slip during traverses from one place to another will
detract significantly from the ability to maintain good
rover position estimates. Computer-vision-based mo-
tion and pose estimation, or visual odometry, is one
viable sensing solution. Current methods require sub-
stantial computation but may be feasible for future,
relatively fast-moving rovers if realized in hardware or
firmware with cameras that have dedicated embedded
processors.
It is highly desirable to have a capability to
sense wheel slippage so that corrective control actions
may be taken. Barring the capability to directly mea-
sure wheel slip, measurement of over-the-ground rover
speed would allow calculation of percentage slip using
an analytical relationship between slip, over-the-ground
speed, and wheel linear speed (as derived from encoder
readings or tachometers, for example). The problem
here is that true over-the-ground speed is also difficult
to measure. If a rover attempts to drive forward while
all wheels are slipping, interpretation of wheel encoder
readings alone will indicate forward progress, but in
all probability the rover position will not have changed
significantly. Some Doppler and millimeter-wave radar
solutions exist for measuring true vehicle speed, but
for rover use they must be low-power and low-mass
devices.
In soft soils, loss of traction due to excessive wheel
slippage can also lead to wheel sinkage and ultimately
vehicle entrapment. It is possible for wheels to sink to
soil depths sufficient to prohibit rover progress over ter-
rain, thus trapping the vehicle at one location. This is
also possible on soils with insufficient bearing strength
to support the rover (incidentally, a property to which
a look-ahead visual perception system may be insensi-
tive). Like wheel slip, it is desirable to have a capability
to sense excessive wheel sinkage so that corrective
controls may be executed before immobility results.
Sinkage measurements are also valuable for reducing
position estimation errors. A means to measure wheel
sinkage permits overall reductions in the effects of prop-
agating nonsystematic error during rover traverses on
varied terrain.
Terrain Properties
Capabilities for noncontact sensing of terrain properties
such as hardness or bearing strength are needed for de-
tecting nongeometric mobility hazards. Passive stereo
Part G 69.2
1246 Part G Infrastructure and Service Automation
vision or other ranging systems available on existing
rovers cannot detect pits filled with loose drift ma-
terial that may have insufficient load-bearing strength
to support a rover. Such hazards are known to exist
on the Martian surface and need to be detected be-
fore a rover engages them, potentially meeting with
catastrophe. Downward-looking impulse radar can be
employed as a proximity sensor for this problem. Sim-
ilar millimeter-wave and microwave ranging sensors
are also useful for general obstacle detection and colli-
sion avoidance in environments subject to dust, blowing
sand, and other all-weather conditions. However, the
mass of available units may be prohibitive for some
planetary rover applications, and like the speed mea-
surement radars mentioned above, candidate radars for
terrain property sensing must be low-power and low-
mass devices.
It is also possible to infer nongeometric terrain
properties from sensor data. Some viable approaches
consider terrain appearance in camera images using im-
age texture differences for soil and rocks and other
approaches employ proprioceptive sensing (e.g., of vi-
brations) to resolve differences in feel of the terrain type
beneath rover wheels. The latter approach applies once
the terrain in question has been engaged and is there-
fore more useful for intelligent, reactive traction control
than for nongeometric mobility hazard avoidance. The
look-ahead, image texture-basedmethods, in addition to
their utility for appearance-based hazard detection, are
also useful for intelligent predictive traction control on
varied, but traversable, terrain surfaces.
69.2.2 On-Orbit and In-Space Robotics
Space robots have been used in low-Earth orbitfor tasks
of automatedservicing, inspection,and assembly. Satel-
lites require servicing for various reasons, each calling
for various forms of service action to be taken. Failure
of defective hardware may call for repair or replace-
ment of components or modules. Anticipated depletion
of fuel orpropellant maycall for refuelingin spaceif the
satellite’s mission is intended to continue. When a satel-
lite’s lifetime or mission expires it may be necessary to
remove it from orbit. On-orbit robotic servicing applies
to repair/replacement and refueling activities.
One of the automation challenges is the physi-
cal capture of free-floating satellites for retrieval and
subsequent servicing. Other challenges are related to
the general area of intelligent sensing and associated
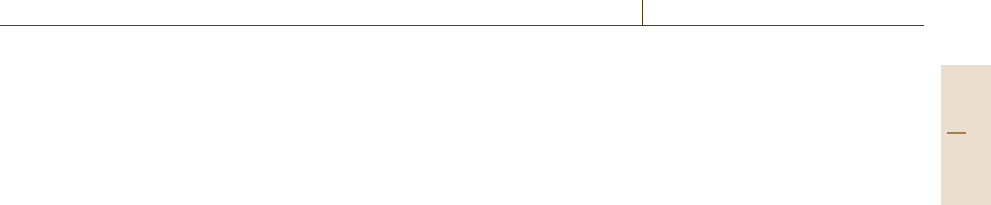
data processing to ensure safe operations. Servicing
activities are representative of maintenance tasks that
Fig. 69.4 Illustration of robotic maintenance in space
are slated for on-orbit and in-space robots (Fig.69.4).
Other relevant tasks fall into the categories of assembly
of space structures and their post-assembly inspection
(Fig.69.5), as well as assistance to astronauts perform-
ing extravehicular activity (EVA).
In assembly operations, space robots would be used
to transport structural elements and mate elements that
are part of a larger space structure. Such tasks call for
rendezvous and docking, dexterous manipulation, and
fine motion control for execution of detailed assem-
bly sequences. In-space assembly may be supported by
automated planning on space robot computers and on
off-board computers, or via human teleoperation. Some
space structures will have dedicated robotic systems as
part of their fully assembled design. An example is the
International Space Station, which (when fully assem-
bled) will have robotic systems including three main
manipulators, two small dexterous arms, and a mobile
base/transporter system.
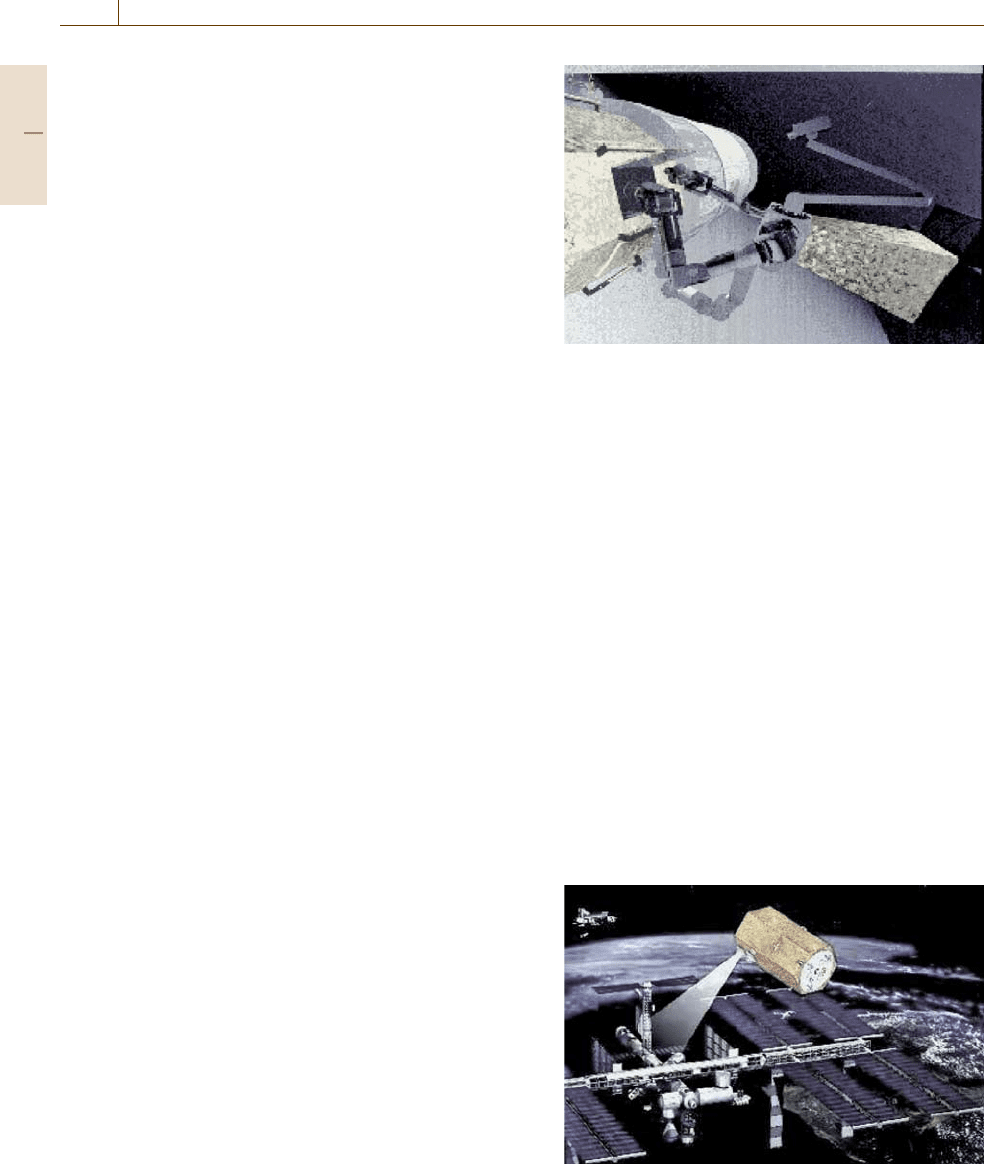
Robots that perform important inspection tasks are
also needed on-orbit to examine space station and
Fig. 69.5 Illustration of robotic inspection in space
Part G 69.2
Space and Exploration Automation 69.2 Challenges of Space Automation 1247
spacecraft external hardware and outer surfaces for
damage or other problems. This may be done us-
ing robotic vision supported by mobility algorithms
designed to ensure required coverage of critical sur-
faces. Both free-flying and legged space robots that
walk on space structure exteriors can be employed.
When astronauts must leave the safer confines of space
stations or spacecraft to perform EVA, space robots
will support their activities by performing tasks such
as retrieval and hand-off of tools for astronaut use,
monitoring of EVA operations, serving as additional
eyes or illumination sources to facilitate EVA in ar-
eas that are hard to access, or working cooperatively
as direct EVA participants. Research is underway to
address necessary challenges and technology develop-
ments applicable to a range of system entities from
Earth-based operations infrastructures to autonomous
robotic operations.
69.2.3 Subsurface Robotics
The solar system exploration agenda for the world’s
space agencies includes plans to access and sample the
subsurface environments of terrestrial planets, moons,
and small bodies such as comets and asteroids. This will
be yet another class of tasks for space robots. Near-term
focus is on the Moon, Mars, and Jupiter’s moon Europa,
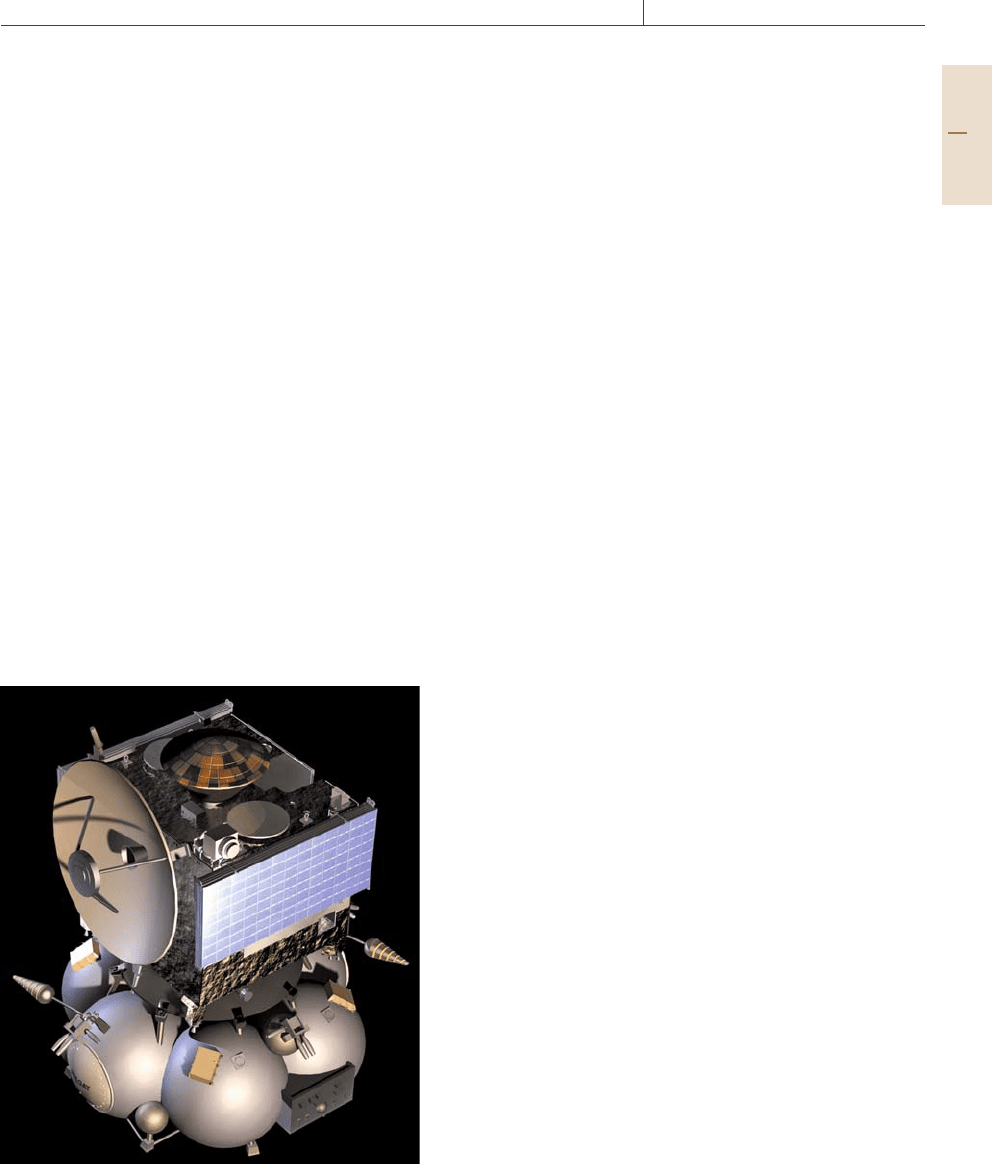
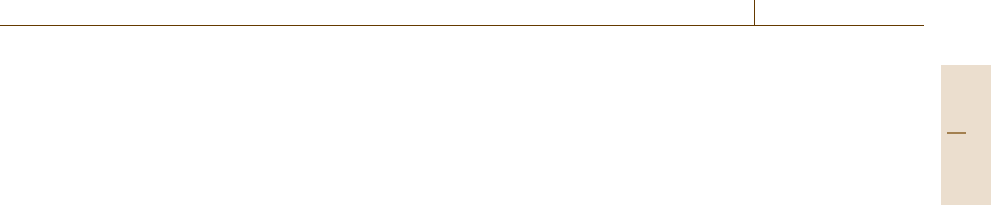
Fig. 69.6 Mars Express spacecraft (courtesy of ESA)
the surface of which is ice-covered and the subsurface
of which is presumed to be an ocean of water possibly
harboring life. The subsurface of Mars is of interest be-
cause it is believed to be the only place on the planet
in which liquid water potentially exists and because
its sedimentary rock layers are believed to contain in-
formation about the geologic, hydrologic, and climatic
evolution of the planet as well as any signs of extinct
life (Fig.69.6). Subsurface water in its various forms on
Mars is alsoconsidered a critical resource for sustaining
robotic outposts and future human explorers. Water-ice
and structure of the lunar subsurface are of interest for
similar reasons. Along the same vein, the potential for
an ocean and life on Europa make its scientific interest
quite clear.
Today there is significant focus on ways and means
to drill and bore into the surfaces of these bodies
using automation and robotics, and there are many
challenges to overcome. Most challenges being ad-
dressed presently relate to understanding the physics
and mechanical system requirements for drilling into
consolidated and unconsolidated materials comprised
of soil, rock, and/or ice to both shallow and deep
depths. Based on the findings of various such stud-
ies, associated requirements for intelligent control and
autonomy for robotic subsurface explorers are being
pondered as well by planetary scientists and engineers
alike (including aerospace, robotics, and Earth mining
engineers).
Robotics challenges presented by drilling mechan-
ics largely relate to control issues. After years of
experience drilling into the Earth, the best techniques
are still more of an art form than an engineering pro-
cedure. Humans are typically intimately involved in
determining and implementing the recovery procedures
when problems occur that inhibit drilling progress.
The art form mastered by human drill operators
translates, for space robotics, into a sensor-feedback-
intensive, knowledge-based, and reactive control task
that will need to be fully autonomous since similar
levels of human supervision will not be possible on
remote surface missions. Robust capabilities of auto-
mated monitoring and diagnosis with safe and reliable
autorecovery algorithms are necessary. At the very
least, human-equivalent performance by robotic sub-
surface devices may be needed for most tasks. As
with subsurface drilling on the Moon or Mars, loco-
motion through ice followed by subsea navigation will
require high levels of robotic autonomy moving be-
yond intelligent control and onto adaptive and learning
systems.
Part G 69.2
1248 Part G Infrastructure and Service Automation
69.2.4 Automation
Robotics typically refers to electromechanical systems
that embody some level of programmable intelligence
and that interact with or within physical environments.
Robots often operate in environments that are largely
unknown a priori and may be unstructured, thereby
requiring sensing and perception to compute or infer
intelligent actions. Automation often refers to auto-
mated devices or techniques that somehow improve
the performance or utility of a system or process.
Automated systems often operate in structured envi-
ronments, and their operation may or may not be
physical.
Automation for space systems is often applied to
reduce costs or enable new mission capabilities. To
date, some of the most advanced examples center on
the use of robotics as the form of automation, as
nonrobotic human spaceflight missions have relied to
a large extent on the capabilities of humans to achieve
mission success. Automation has also been used for
more common actions such as spacecraft antenna and
solar panel deployment enabled by automatic mecha-
nisms and devices. In the present and future, the use
of nonrobotic automation is on the rise and comes in
a variety of forms. Applications range from more per-
vasive software-based automation of data processing
functions to incorporation of robotic capabilities into
space suits intended to augment and amplify human ca-
pabilities in space. On some space missions, collection
of scientific data as well as its processing and analysis is
also handled by automation of science instrument sys-
tems. Some of the means of automating such functions
include computer vision, pattern recognition and classi-
fication techniques, and automated reasoning methods
of artificial intelligence.
Other activities and required infrastructure for
future space missions call for automation of the man-
ufacturing and construction variety. This is the case for
outposts on other planetary surfaces or in space where
humans would live and work for extended periods. As-
tronauts living and working in space on space stations
are typically surrounded by automated systems that run
life-support systems and perform functions formerly
performed by themselves or their human mission con-
trollers based on Earth. Example tasks for space station
automation solutions include initiation and monitor-
ing of experiments as well as detection and diagnosis
of system failures. On planetary surfaces, the cost-
effective approach to sustenance of astronauts includes
living off the land by using in situ resources; for ex-
ample, automated systems and production plants would
collect and process soil to extract water. Outpost au-
tomation would manufacture materials needed for life
support systems and would produce electricity and fu-
els to power equipment and facilities. Implementation
of automated systems along these lines has been con-
templated and extensively studied for many years [69.5]
and will be essential for long-duration human presence
in space.
69.3 Past and Present Space Robots and Applications
Over the past 30years, the exploration activities of
international space agencies have given automation
technology a proving ground for demonstrating its util-
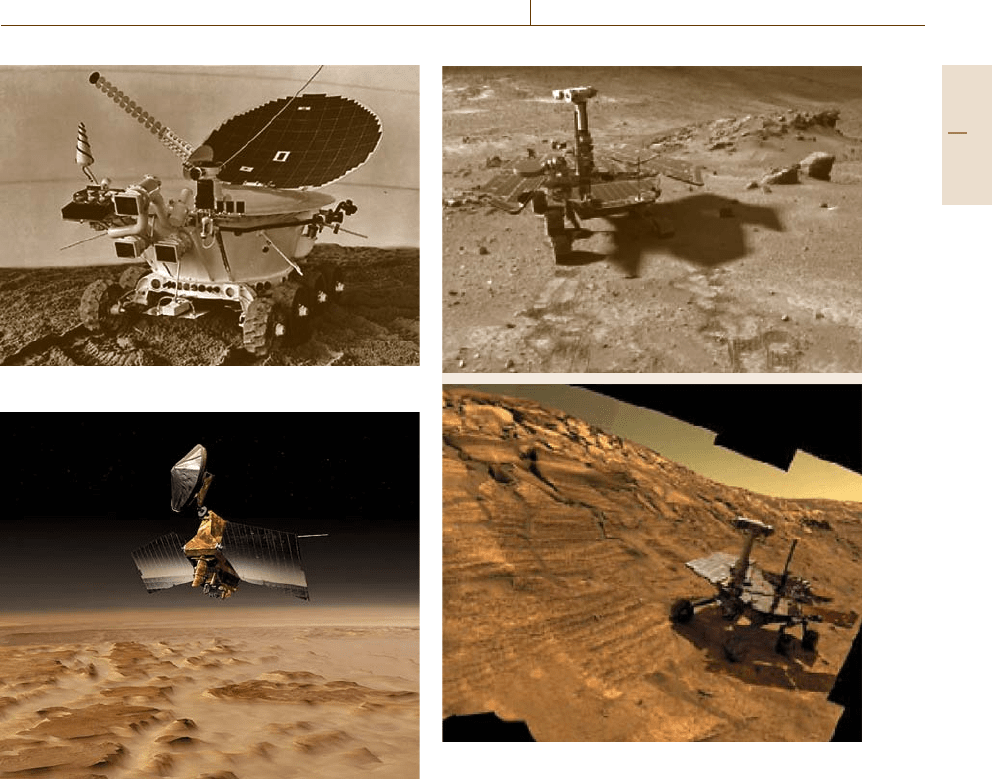
ity and practicality in space. In the 1970s the former
USSR landed rovers on the Moon and teleoperated
them from Earth (Fig.69.7). Since the early 1980s nu-
merous NASA space shuttle flights have consistently
involved teleoperation of the Canadarm. Space struc-
ture and scientific hardware deployments, assembly,
servicing, and repair have been some of the primary
uses of space automation on such missions in low-
Earth orbit. Such on-orbit uses of automation and
robotics have involved performance of tasks by as-
tronauts and robots teleoperated by astronauts, with
the most complex work performed by suited astro-
nauts during EVA, that is, on spacewalks outside of
the Space Shuttle Orbiter. Other robotic systems have
been used in this general class of application scenar-
ios for tasks associated with automation of science
experiments performed in space-based laboratories. In
the early 1990s, Germany’s ROTEX technology experi-
ment demonstrated the use of a mechanical manipulator
remotely controlled from Earth while on the NASA
Space Shuttle Orbiter as well as remotely controlled
by astronauts on the Space Shuttle Orbiter. Japan’s Ex-
perimental Test Satellite VII demonstrated automation
and robotic servicing technologies on-orbit in the late
1990s. NASA’s free-flying Autonomous Extravehicular
Robotic Camera demonstrated a means to provide addi-
tional viewpoints or eyes for astronauts during EVAs.
Additional systems have been proposed and devel-
oped for space automation but never flown for various
Part G 69.3
Space and Exploration Automation 69.3 Past and Present Space Robots and Applications 1249
Fig. 69.7 Russian lunar rover, Lunokhod 2
Fig. 69.8 Concept of the Mars Reconnaissance Orbiter
(courtesy of NASA/JPL)
reasons such as budget-related cancelations (e.g., the
Orbital Maneuvering Vehicle, the Flight Telerobotic
Servicer, and Ranger).
With the exception of the Moon missions of the
1970s the aforementioned automation and robotics ac-
tivities have been performed in low-Earth orbit. Space
automation has been applied in geostationary orbit
around the Earth as well. The many communications,
scientific, and military satellites in various Earth or-
bits today are great examples of space automation that
have directly affected quality of life on Earth. Robotic
tasks that can be automated in geostationary orbit in-
clude satellite servicing and deployment/assembly of
large space structures. However, since astronauts have,
to date, been constrained by technology to operations
a)
b)
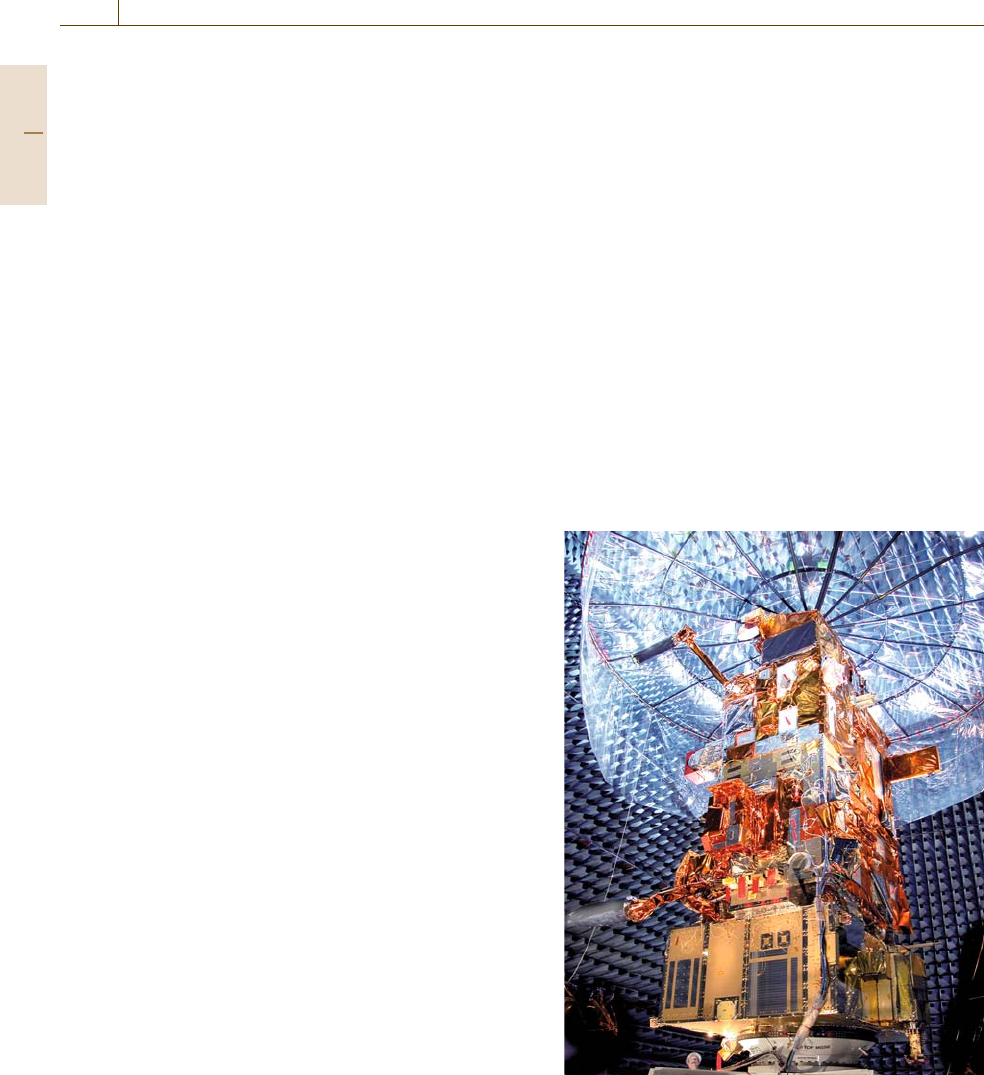
Fig. 69.9a,b Mars exploration rovers Spirit (a) and Op-
portunity
(b) on Mars (special-effects images created using
photorealistic rover models and image mosaics acquired
during their missions)
in low-Earth orbit, robotic systems are more critical for
automated activities in geostationary orbit.
Moving further out into space beyond Earth,
robotics continues to play a critical role in expand-
ing our knowledge of the solar system. Space agencies
have employed numerous interplanetary robotic space-
craft, planetary probes, surface landers, and rovers that
have collected a substantial amount of data leading to
our current understanding of the solar system [69.6].
Destinations visited include nearly all of the planets as
well as asteroids and comets. The use of robotic tech-
nology in space has reached a level where, presently,
multiple robotic spacecraft are operating at any given
time throughout the solar system. At Mars alone, mul-
tiple robotic spacecraft including satellites, landers,
Part G 69.3
1250 Part G Infrastructure and Service Automation
and rovers are in operation today, performing scien-
tific missions aimed at understanding the past or present
habitability of that planet. The most recent orbiting
spacecraft that are still in operation at Mars were de-
livered by the USA and Europe and include Mars
Odyssey, Mars Reconnaissance Orbiter (Fig. 69.8), and
Mars Express (Fig.69.6). The most recent rovers that
are still in operation are NASA’s twin Mars explo-
ration rovers, Spirit and Opportunity (Fig.69.9), which
have been operating at different locations on the Mar-
tian surface since 2004. They have both collected data
leading scientists to conclude that liquid water once
flowed on the surface of Mars at their respective landing
sites.
69.4 Future Directions and Capability Needs
Relatively few places on Earth’s moon have been ex-
plored by the rovers of the 1970s and by astronauts
during the series of NASA Apollo missions. As such,
relatively little is known about our Moon. Today, the
world’s space agencies and commercial sectors areturn-
ing a renewed focus on the Moon for further scientific
exploration, lunar resource-related commercial indus-
try, space tourism, and as a proving ground for enabling
future human exploration of Mars. Automation and
robotics are pervasive as tools to be used by human ex-
plorers to perform a variety of tasks involving rovers
and automated equipment for:
•
Surface exploration and transportation/deployment
of instruments and systems
•
Acquisition of scientific samples
•
Industrial mining for resources
•
Moonbase construction and assembly of facilities
•
Overall maintenance and repair of lunar infrastruc-
ture.
On the lunar surface, networked teams of robots will
work cooperatively to prepare sites for human habitats
at permanent lunar settlements. Robots will work with
automated machines and instruments as an integrated
system that constructs, services, monitors, and repairs
lunar outpost facilities. Such tasks may be shared with
astronauts or lunar settlers. Robotic systems will also
help to automate prospecting, mining, and processing
of lunar raw materials to help sustain human presence
by minimizing dependence on Earth support. Automa-
tion and robotic technologies to be developed toward
this end will be used in similar ways to facilitate even-
tual human exploration and settlement of locations on
Mars.
In space, free-flying space robots will advance be-
yond the current state of the art to perform routine
servicing of space assets such as Earth satellites and
space stations (Fig.69.10). Free-flying robots will work
cooperatively with astronauts to construct large scien-
tific and engineering space structures. Advances in the
following areas will be needed:
•
Mobility on space structures
•
Rendezvous and docking with spacecraft and struc-
tures
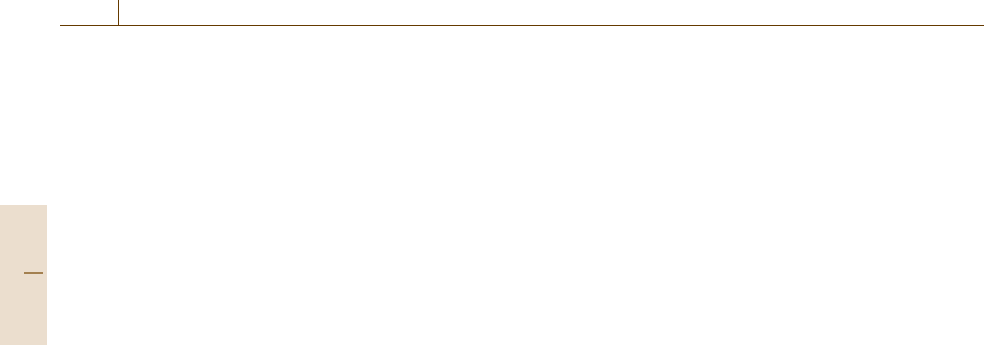
Fig. 69.10 MetOp-A satellite undergoing final testing at
EADS Astrium’s facilities in Toulouse. MetOp-A was
launched on 19 October 2006 from the Baikonur Cosmod-
rome in Kazakhstan, on a Soyuz ST rocket with a Fregat
upper stage (courtesy of ESA)
Part G 69.4
Space and Exploration Automation 69.6 Further Reading 1251
•
Dexterousand force-controlledobject grasping,ma-
nipulation, and transport
•
Human–robot task planning and sequencing.
Planetary surface robotic systems will advance to the
next level of autonomous capability enabled by new
and improved sensing solutions. Advances are required
to reduce the computational complexity of computer
vision algorithms or to increase the computational
speed of radiation-hardened processors that they run
on. In addition to devices for sensing or detecting
wheel slip, wheel sinkage, and terrain properties for
planetary surface mobility, reliable devices and soft-
ware are needed that improve existing capabilities
for:
•
Sensing large-scale terrain discontinuities such as
cliffs, craters, and escarpments
•
Optical ranging in both full sun and deep shadow
•
Distributed sensing in multiple-rover applications.
69.5 Summary and Conclusion
An overview of space and exploration automation and
various associated challenges was presented with rele-
vanceto robotics applications foron-orbit, in-space, and
planetary domains. Representative space robots and ap-
plications were noted followed by indications of future
directions for space automation and technological ca-
pabilities that will be needed to successfully perform
future space missions.
During the past several decades space automation
has been relied upon, either solely or in concert with
resident human capability, to explore and reveal scien-
tific knowledge of space and the planets. The levels of
automation or degrees of autonomy have varied from
mission to mission and will necessarily increase in the
future as more ambitious space missions are pursued.
Autonomous mobility and manipulation are fun-
damental functions for space robotic tasks. Viable
solutions that support these functions within formidable
constraints of space computing hardware drive the
technological capabilities of space robots, and ulti-
mately, mission success. Application domains include
planetary surfaces, outposts/settlements, on-orbit/in-
space operations, and subsurface environments. The
challenges are associated with robotic tasks includ-
ing exploration, servicing, infrastructure building and
construction, inspection, and assembly in space and
planetary environments. A sense of the existing levels
of automation and the robotic intelligence or au-
tonomy employed to meet the various challenges is
provided.
In general, automation and robotics for space and
planetary missions require a variety of mobility and
manipulation capabilities supported by viable and ad-
equate means for sensing/perception and sophisticated
software algorithms that represent an appropriate level
of intelligence for the mission. Solutions must com-
ply with hard constraints on mass, power, mechanical
complexity, electrical characteristics, and computing.
In time, the greatest needs and remaining limitations
will be addressed and overcome by innovations and ad-
vances in sensing, perception, and autonomous control
engineering. To be sure, space robot intelligence and
autonomy will play a critical role in meeting the chal-
lenges to come.
69.6 Further Reading
•
A.M. Howard, E.W. Tunstel (Eds.): Intelligence for
Space Robotics (TSI, San Antonio 2006)
•
T. Huntsberger, A. Stroupe, B. Kennedy: System
of systems for space construction, Proc. IEEE
Int. Conf. Syst. Man Cybern., Waikoloa (2005)
pp.3173–3178
•
A. Stroupe, T. Huntsberger, B. Kennedy, H. Ag-
hazarian, E. Baumgartner, A. Ganino, M. Garrett,
A. Okon, M. Robinson, J. Townsend: Heteroge-
neous robotic systems for assembly and servicing,
Proc. 8th Int. Symp. Artif. Intell. Robot. Autom.
Space, Munich (2005)
•
P.S. Schenker (guest Ed.): Special issue on robots in
space, Autonom. Robots 14(2/3), 99–263 (2003)
•
B. Sommer: On-orbit servicing of satellites (OOS)
as a major application field – the TECSAS mission,
Proc. 54th Int. Astronaut. Congr. Int. Astronaut.
Fed. (IAF), Bremen (2003)
Part G 69.6

1252 Part G Infrastructure and Service Automation
•
A. Popov: Mission planning on the International
Space Station program: concepts and systems, Proc.
IEEE Aerosp. Conf., Big Sky (2003)
•
N.J. Currie, B. Peacock: International Space Sta-
tion robotic systems operations – a human factors
perspective, 46th Annu. Meet. Hum. Factors Ergon.
Soc., Baltimore (2002)
•
E. Dupuis, R. Gillett, R. L’Archevêque, J. Rich-
mond: Ground control of International Space Sta-
tion robots, J. Mach. Intell. Robot. Control 3(3),
91–98 (2001)
•
P.J. Staritz, S. Skaff, C. Urmson, W. Whittaker:
Skyworker: a robot for assembly, inspection and
maintenance of large scale orbital facilities, Proc.
IEEE Int. Conf. Robot. Autom., Seoul (2001)
pp.4180–4185
•
D.A. Whelan, E.A. Adler, S.B. Wilson, G.M. Roes-
ler: DARPA Orbital Express program: effecting
a revolution in space-based systems, Proc. SPIE
Small Payloads in Space, Vol.4136 (2000) pp.48–
56
•
A. Ellery: An Introduction to Space Robotics
(Springer, Heidelberg 2000)
•
M. Oda, K. Kibe, F. Yamagata: ETS-VII – space
robot in-orbit experiment satellite, Proc. IEEE Int.
Conf. Robot. Autom., Minneapolis (1996) pp. 739–
744
•
S.B. Skaar (Ed.): Teleoperation and Robotics in
Space (AIAA, Reston 1994)
•
A.K. Bejczy, S.T. Venkataraman, D. Akin (Eds.):
Special issue on space robotics, IEEE Trans. Robot.
Autom. 9(5), 524–704 (1993)
•
A.A. Desrochers (Ed.): Intelligent Robotic Systems
for Space Exploration (Kluwer, Boston 1992)
•
T. Sheridan: Telerobotics, Automation, and Human
Supervisory Control (MIT, Cambridge 1992)
References
69.1 A.Ellery:Spacerobotics,Part1,Int.J.Adv.Robot.
Syst. 1(2), 118–121 (2004)
69.2 A.Ellery:Spacerobotics,Part2,Int.J.Adv.Robot.
Syst. 1(3), 213–216 (2004)
69.3 A. Ellery: Space robotics, Part 3, Int. J. Adv. Robot.
Syst. 1(4), 303–307 (2004)
69.4 P. Putz: Space robotics, Rep. Prog. Phys. 65,421–
463 (2002)
69.5 R.A.FreitasJr.,T.J.Healy,J.E.Long:Ad-
vanced automation for space missions, Proc.
7th Int. Joint Conf. Artif. Intell., Vancouver 1981
(William Kaufmann, New York 1981) pp. 803–
808
69.6 M. van Pelt: Space Invaders: How Robotic Space-
craft Explore the Solar System (Springer, New York
2006)
Part G 69

1253
Cleaning Auto
70. Cleaning Automation
Norbert Elkmann, Justus Hortig, Markus Fritzsche
The potential applications of automation for clean-
ing are many and diverse. All over the world,
research organizations and companies are devel-
oping automatic cleaning systems [70.1]. Products
such as automatic floor cleaning robots and floor
vacuum cleaners available for household use are
sold ten thousand times over every year at prices
below US
$300 (Fig. 70.1). While versatile, high-
performance systems exist for other applications
such as professional floor cleaning, airplane wash-
ing, ship cleaning, and facade cleaning, they are
by no means as widespread as household systems.
Automatic cleaning systems are frequently
extremely complex robot systems that operate
autonomously in unstructured environments or
outdoor areas. Cleaning automation not only
incorporates cleaning engineering but also
a variety of other technical disciplines, e.g.,
autonomous power supply, sensor systems, envi-
ronment modeling, and path planning in dynamic
environments.
70.1 Background
and Cleaning Automation Theory ...........1254
70.1.1 Floor Cleaning Robots ...................1255
70.1.2 Facade, Pool, Ventilation Duct,
and Sewer Line Cleaning Robots.....1255
70.2 Examples of Application ........................1256
70.2.1 Floor Cleaning Systems..................1256
70.2.2 Roofs and Facades........................1258
70.2.3 Ducts and Sewer Lines ..................1261
70.2.4 Swimming Pools ..........................1261
70.3 Emerging Trends ..................................1263
References ..................................................1263
Some examples of automatic cleaning systems for
floors, facades, swimming pools, ventilation ducts,
and sewer lines serve to highlight the current
potential of cleaning automation and provide
a glimpse of future developments.
Humans typically experience cleaning as monotonous
work, which by its very nature is performed in dirty en-
vironments. Moreover, cleaning can sometimes even be
hazardous to health or life endangering, depending on
the area or object and the type of cleaning involved.
Nonetheless, such areas may require regular cleaning.
Cleaning therefore ideally meets the premises for
applying robots or remote-controlled systems and is
inherently a typical service robot application. Unsur-
prisingly, developments over the last 20years have
been aimed at automating cleaning systems. The range
of systems available varies widely. Apart from floor
cleaning systems, other systems also clean facades,
swimming pools, ventilation ducts, and sewer lines.
Some of them are extremely complex.
Fig. 70.1 iRobot Roomba
Part G 70
1254 Part G Infrastructure and Service Automation
Mass markets for cleaning robot applications have
already developed in some sectors. Vacuuming robots
for household use represent one of the most widely
sold robot systems worldwide. Their sheer numbers and
low purchase prices of less than US $300 account for
their great commercial success in the household sec-
tor [70.2,3]. Residential users have far lower demands
on cleaning quality and, above all, cleaning speed
than professional users. In the 1990s, several manu-
factures of cleaning machines throughout the world
developed autonomous cleaning robots for professional
floor cleaning. Nonetheless, these systems have not
yet become established on the market for a variety of
reasons. Less flexibility than humans, high acquisition
costs, low availability, and complexity of operation of-
ten militate against the use of these systems.
Cleaning robots [70.1] and floor cleaning systems
(Fig.70.1) in particular share many commonalities with
other service robots, e.g., for transport or monitoring
tasks. Particular points of intersection are sensor sys-
tems for obstacle detection and environment modeling,
powersupply, path planning and execution,and human–
machine interfaces. Thus, cleaning robots constitute
a preliminary stage to complex household applications
for service robots or applications with direct human–
robot interaction.
Cleaning robots forfacades, pipes, ventilationducts,
and sewer lines are however not mass-produced items.
These systems are specially optimized for the require-
ments and geometry of the surface or object being
cleaned and are used exclusively in professional envi-
ronments rather than in the residential sector.
A robot’s features or technical innovations are less
crucial to its acceptance than its cleaning efficiency and
cost effectiveness. A system’s flexibility and ease of
operation are other important criteria for acceptance.
70.1 Background and Cleaning Automation Theory
Cleaning robots incorporate a multitude of basic de-
velopments and theories of robotics, e.g., mobility
and navigation, communication, sensors and sensor
networks, robotics and intelligent machines, and tele-
operation, which are treated in conjunction with mobile
robots in Chaps. 9 and 11 of this Handbook.
Cleaning robots have different levels of automation,
ranging from remote-controlled systems with inexpen-
sive, individual sensors to autonomous systems with
complex, multiple sensors for environment modeling
and navigation.
All types of cleaning systems share certain technical
subsystems:
•
Motion platform for the system and cleaning unit
•
Control and operating system
•
Sensor system for environment modeling (in auto-
matic systems) and obstacle detection
•
Power supply
•
Communications system
•
Cleaning unit and, where applicable, suction and
material processing units
•
Various safety devices (collision avoidance systems
for floor cleaning systems, securing or recovery
ropes for facade, pipe, duct, sewer, and pool clean-
ing systems)
All automated cleaning systems draw on established
cleaning methods and technologies. An automated
cleaning system however cannot inspect its cleaning
quality as easily as a human can. At present, mobile
systems that clean areas with varying optical conditions
and textures cannot measure the level of dirtiness re-
liably. They can, however, check the quantity of dirt
picked up over a unit of time.
Cleaning robots from the different fields of applica-
tion differ widelyin terms ofrequirements andtechnical
challenges. Basically, two categories can be distin-
guished and the underlying requirements subsumed in
these two groups:
•
Floor cleaning robots: Such cleaning systems re-
lieve humans of monotonous work such as mopping
and vacuuming. For their use to be cost effec-
tive, these systems must function autonomously and
without an operator. Easy operability, high-quality
cleaning, and flexible use are basic requirements
these systems have to meet.
•
Facade, pool, ventilation duct, and sewer lineclean-
ing robots:Such cleaning systems are utilized where
humans are unable to access an area in need of
cleaning or are only able to access it with ex-
treme difficulty. These systems can be engineered
to be remote controlled or fully autonomous. Usu-
ally, they are customized for a specific application
scenario. Nevertheless, easy operability and high-
quality cleaning are basic requirements. They must
Part G 70.1