Москвин Б.В. Теория принятия решений
Подождите немного. Документ загружается.

251
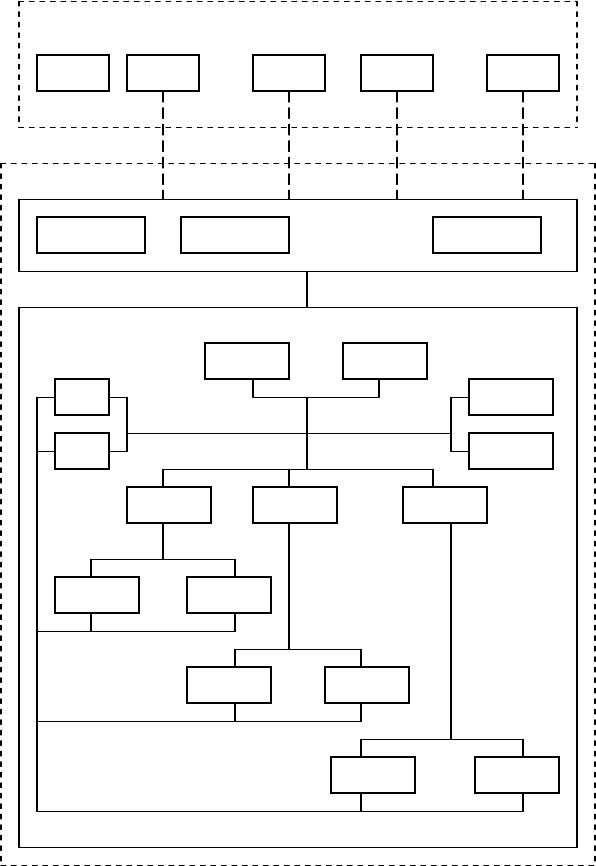
Орбитальная группировка
….. .…..
Наземная группировка
. . . . . . . . . .
Главный Центр (ГИЦИУ)
. . . .
. . .
. . .
. . .
Рис.12.1
К
А
-1 К
А
-2 К
А
-N ОС-КОС-1
ОКИК-1 ОКИК-МОКИК-2
КП Г
Ц
Ц
УП-1
ОКП
Б
Ц
Т
Ц
ПУ-К
А
ПУ-К
А
УЭНС
ОЭМС
ПУ-К
А
Ц
УП-1
Ц
УП-L
ПУ-К
А
ПУ-К
А
ПУ-К
А
252
С целью повышения потенциальных пространственно-вре-
менных возможностей управления КА в состав АСУ КА входит
совокупность территориально распределенных отдельных ко-
мандно-измерительных комплексов (ОКИК), объединяющих рас-
положенные в одном географическом районе радиотехнические
средства и средства обработки информации, которые предназна-
чены для непосредственного приема с КА и передачи на КА всей
измерительной
и управляющей информации. ОКИК по каналам
связи и передачи данных обменивается информацией с Главным
Центром (Главный центр испытаний и управления - ГИЦИУ).
В состав Главного Центра входят: командный пункт главно-
го центра (КП ГЦ), осуществляющий общее оперативное руково-
дство дежурными сменами подразделений Главного центра; от
дел координации и планирования (ОКП), обеспечивающий
согла-
сование планов работы подразделений, управляющих КА; управ-
ление эксплуатации наземных средств (УЭНС), ответственное за
состояние средств наземной группировки (готовность к работе,
отказ, техническое обслуживание, ремонт, и т.д.); отдел электро-
магнитной совместимости радиоэлектронных средств (ОЭМС),
предоставляющий информацию о влиянии радиопомех (как соз-
даваемых техническими средствами наземной группировки, так и
посторонних
) на работу наземных средств; баллистический центр
(БЦ), предоставляющий информацию о состоянии движения КА;
телеметрический центр (ТЦ), анализирующий состояние борто-
вых систем КА по результатам телеизмерений.
Основными подразделениями ГИЦИУ, ответственными за
непосредственное управление КА, являются центры управления
полетами (ЦУП), в состав которых входят пункт управления КА
(ПУ КА). Именно на
пунктах управления КА и осуществляется
управление конкретными космическими аппаратами, для чего
решаются задачи планирования (перспективного, долгосрочного,
оперативного), а также задачи оперативного управления. Управ-
ление КА осуществляется в соответствии с технологическими
циклами, при этом в качестве основной функции управления КА
рассматривается функция принятия (выбора) решения.
Особенности функционирования АСУ КА, как сложной во
-
енно-технической системы, влияют на математические форма-
лизмы, которые следует использовать при принятии решений.
Ранее были рассмотрены особенности моделей сложных военно-
технических систем, конкретизируем их применительно к АСУ КА.

253
1). Система функционирует в условиях существенной неоп-
ределенности обстановки. При управлении КА решаются две ос-
новные группы задач.
Первая группа задач связана с предварительным планиро-
ванием действий, обеспечивающих управление КА, таких как из-
мерение текущих навигационных параметров КА, оценка техниче-
ского состояния КА по результатам телеизмерений, выдача на
борт КА разовых
команд и временных программ и др.
Вторая группа задач обеспечивает контроль выполнения
предварительно разработанной программы управления КА - пла-
на (данный этап часто называют оперативным управлением).
Решение указанных задач разнесено во времени.
t
t
н
t
к
t
о
t
f
Планирование осуществляется на основе информации, по-
лученной к моменту t
н
, а реализация плана (программы управле-
ния) начинается в момент t
о
. На интервале времени (t
н
,t
о
] на сис-
тему воздействуют возмущения различного рода. Часть из них,
такие, например, как выход из строя технических устройств в ре-
зультате неисправностей, может быть спрогнозирована, другие,
например, такие, как ошибки операторов, неквалифицированные
действия личного состава, статистической оценке и прогнозу не
подвергаются. Совершенно своеобразными возмущениями, ха-
рактерными для военных систем, являются
воздействия против-
ника. В этих условиях предварительно разработанные планы мо-
гут быть не реализуемы в изменившейся обстановке, что являет-
ся фактором, усложняющим принятие решений на различных эта-
пах управления в АСУ КА.
2). Система имеет выраженный многоцелевой характер
функционирования. Прежде всего, здесь можно различать две
большие группы взаимосвязанных целей: цели объекта
управле-
ния - орбитальной группировки КА; цели наземной группировки,
обеспечивающей управление орбитальной группировкой и вклю-
чающей в свой состав совокупность технических средств управ-
ления. Орбитальная группировка состоит из КА различного целе-
вого назначения, управление которыми осуществляется в соот-
ветствии со специфической технологией. В этой связи технология
Планирование Оперативное управление
254
управления КА и его предназначение, естественно, должны учи-
тываться в моделях принятия решений. Анализ особенностей
функционирования наземных средств управления показывает,
что при планировании их работы целесообразно повышать каче-
ство проведения сеансов управления, минимизировать расход
ресурсов, привлекаемых к управлению, и т.д. Стремление повы-
сить эффективность принимаемых в АСУ КА решений приводит
к
тому, что в моделях необходимо учитывать множественность це-
лей, что усложняет данные модели и алгоритмы поиска рацио-
нальных решений.
3). Структура системы имеет сложное многоуровневое ие-
рархическое строение. Непосредственное планирование и управ-
ление целевым применением КА осуществляется на пунктах
управления ЦУП-ов. При этом ряд КА решает свои задачи совме
-
стно с другими КА в составе орбитальной системы аппаратов,
тогда результаты независимого планирования работы отдельного
КА должны согласовываться (координироваться) на уровне сис-
темы КА. Важной особенностью АСУ КА является то, что назем-
ные средства управления, каналы связи, вычислительные сред-
ства, используемые для обработки информации, являются общи-
ми для КА различных
типов. Таким образом, программы управле-
ния операциями отдельных КА должны координироваться: на
уровне системы КА (на ПУ КА); на уровне ЦУПа, планирующего
управление разнотипных КА, входящих в одну орбитальную сис-
тему; на уровне всей орбитальной группировки КА в целом (в
ОКП). Такая иерархическая структура управления КА должна со-
провождаться использованием специфических
(координацион-
ных) моделей и алгоритмов принятия решений.
12.4. Модели принятия решений в АСУ КА
Одно из центральных мест при концептуальном описании
процессов управления в АСУ КА занимает понятие "о п е р а -
ц и я", под которой обычно понимается действие или система
действий, объединенных общим замыслом и единой целью.
Вследствие этого цель функционирования каждого отдельного КА
реализуется в ходе выполнения им операций, связанных
с ин-
формационным, вещественным и энергетическим обменом с
пунктами управления (обслуживания), а также с другими КА. По-
нятие операции является основным системообразующим поняти-
255
ем, позволяющим объединить описание различных видов дея-
тельности КА (движение, работу аппаратуры, расход ресурса и
т.п.). Содержание и специфика каждой выполняемой операции
находит свое отражение в задании соответствующих параметров,
характеризующих:
- результаты выполнения операций (объем, качество, время
выполнения операций и т.п.);
- расход ресурсов при выполнении операций;
- информационные и
материальные потоки, возникающие в
ходе выполнения операций.
Состояние КА в фиксированный момент времени можно ха-
рактеризовать совокупностью значений параметров операций,
выполняемых КА в указанный момент времени. В целом же про-
цесс функционирования КА можно интерпретировать как процесс
выполнения им комплекса операций (работ), связанных с перево-
дом КА из одного фиксированного состояния
в другое фиксиро-
ванное состояние. Аналогичный вывод оказывается справедлив и
при моделировании функционирования элементов и подсистем
системы автоматизированного управления (например, наземного
комплекса управления - НКУ), при моделировании функциониро-
вания АСУ КА в целом. Таким образом, используя концепцию
комплексов операций, удается связать в единое целое все основ-
ные аспекты функционирования АСУ КА,
связанные с веществен-
ным, энергетическим, информационным обменом ее основных
элементов и подсистем друг с другом и окружающей средой.
На основе концептуального описания процессов автомати-
зированного управления КА проведем построение двух конкрет-
ных классов математических моделей, используемых для плани-
рования работы средств управления.
12.4.1. Характеристика ситуации управления КА
Первым шагом построения моделей планирования опера-
ций, связанных с управлением КА (операций управления), явля-
ется проведение процедуры структуризации - выяснение того, что
же является здесь решением (альтернативой), какова его струк-
тура, из каких компонент оно состоит и чем определяется. Для
этого необходимо провести формализованное описание ситуации
управления. Для описания ситуации управления КА
введем сле-
дующие базисные множества.
256
А = {А
ν
}, ν∈N = {1,..., n} - множество космических аппаратов
(КА);
В = {В
μ
}, μ∈М = {1,..., m} - множество пунктов управления (от-
дельных командно-измерительных комплексов - ОКИК);
D = {D
æ
}, æ∈K = {1,...,к} - множество видов работ, проводимых с
КА;
С = {C
λ
}. λ∈L = {1,...,l} - множество средств управления;
Т = (t
o
, t
f
] - множество моментов времени (интервал планиро-
вания операций).
Тогда множество работ (операций), которые необходимо
запланировать, можно характеризовать как А × D = {<ν,
æ >}.
Обозначим через D
ν
- множество работ, проводимых с ν-м
КА, D
ν
= {D
ν
æ
}, æ∈K
ν
= {1,..., к
ν
}, и С
μ
- множество средств управле-
ния, размещенных на μ-м пункте, С
μ
= {С
μ
λ
}, λ∈L
μ
= {1,..., l
μ
}. Тогда
∪D
ν
= D, ν∈N; ∪С
μ
= C, μ∈M.
Динамика относительного перемещения системы КА-ОКИК
может задаваться функцией (отображением) вида
ε: А × В × Т → {0, 1}, (12.6)
которое называют [39] к о н т а к т н ы м потенциалом. При этом
ε(ν,μ,t) = 1, если A
ν
находится в зоне обслуживания B
μ
в мо-
мент t;
ε(ν,μ,t) = 0, в противном случае.
Так как множества А и В конечны, то функцию ε(ν,μ,t) можно
представить матричной функцией E(t) = ║ε
νμ
(t)║, где ε
νμ
(t) =
ε(ν,μ,t).
Оснащенность ОКИК различными средствами, а также воз-
можности средств по выполнению различных работ с КА можно
характеризовать функциональным отношением (отображением)
θ: А × D × В × C → {0, 1}, (12.7)
которое называют [39] потенциалом д о с т у п н о с т и. При
этом
θ(ν,
æ,μ,λ) = 1, если работа вида æ, проводимая с ν-м КА, мо-
жет выполняться с использованием средства λ, размещенном на
μ-м ОКИК;
θ(ν,
æ,μ,λ) = 0, в противном случае.
Так как множества А,D,В,С - конечны, то функция θ(ν,
æ,μ,λ) мо-
жет задаваться матрицей Θ = ║θ
ν
æ
μλ
║, где θ
ν
æ
μλ
= θ(ν,æ,μ,λ).
257
Возможности проведения различных операций управления
можно характеризовать множеством X
X = {<ν,
æ,μ,λ,t>∈A×D×B×C×T ⎪χ
ν
æ
μλ
(t)= ε
νμ
(t) θ
ν
æ
μλ
= 1}. (12.8)
Возможность здесь понимается как совокупность фактов наличия
зоны видимости КА-ОКИК и технической оснащенности ОКИК
средствами, необходимыми для проведения данной операции.
Задача планирования операций управления заключается в
выборе подмножества X
*
⊆X, такого, что весь комплекс работ вы-
полняется наилучшим в смысле выбранного критерия оптималь-
ности образом.
Для решения данной задачи введем индикаторную функ-
цию вида
u: X → {0, 1}, (12.9)
которая принимает значение 1 или 0 в зависимости от того, за-
планирован соответствующий кортеж <ν,
æ,μ,λ,t> из множества X
к выполнению или нет; таких функций u(x), x∈X, естественно, мо-
жет быть бесконечное множество. В этом случае целесообразно
искать наилучшую в некотором смысле функцию u
*
(x), тогда
X
*
= { x ∈ X ⎪ u
*
(x) = 1}.
Выполнение совокупности операций управления должно
удовлетворять отношениям, ограничивающим выбор (ограниче-
ниям). Так, в частности, такие ограничения должны
- быть связаны с логическими зависимостями, отражающими
последовательность выполнения работ с КА;
- отражать технические условия эксплуатации средств обслу-
живания (невозможность одновременной работы с несколькими
КА, невозможность проведения ряда работ по условиям электро-
магнитной
совместимости и т. д.).
Тогда среди всех возможных функций u∈U можно выделить
подмножество функций Δ, допустимых с точки зрения ограниче-
ний, накладываемых на управление КА; Δ ⊆ U.
Будем полагать, что отношения предпочтения заданы в
кардинальных шкалах, т.е. являются функциями вида
f
i
: U → R
1
,
i∈G, где R
1
- множество действительных чисел. Тогда в целом
задача планирования операций управления КА в общем виде мо-
жет быть представлена как
u
*
= arg opt { f
i
(u), i ∈ G } (12.10)
u∈Δ
258
Формализованное описание множества допустимых вари-
антов решений (планов) Δ и целевых функций f
i
(u) целесообразно
проводить в рамках конкретного класса моделей планирования:
статических или динамических.
12.4.2. Статическая модель планирования операций
управления КА.
Существенной особенностью статических моделей являет-
ся то, что здесь анализ и сравнение различных программ взаимо-
действия основных элементов АСУ КА производятся на всем ин-
тервале управления T целиком в условиях "замораживания" из-
менения состояния операций.
Каждую такую программу взаимодействия (план) можно
представить бесконечномерным вектором u = ║u
ν
æ
μλt
║, ν∈N, ,æ∈K,
μ∈M, λ∈L, t∈T, компоненты которого принимают значения из {0,1}.
В то же время реальный процесс взаимодействия КА со средст-
вами управления, проводимый с целью выполнения операции
управления (ν,
æ), осуществляется непрерывно в некоторых ин-
тервалах времени (t
н
ν
æ
, t
к
ν
æ
], t
н
ν
æ
,t
к
ν
æ
∈ T, где T - множество момен-
тов времени, в которые потенциально возможно выполнение опе-
раций управления. Можно считать, что выполнение каждой опе-
рации (ν,æ) эквивалентно выполнению некоторой совокупности
действий {y
j
, j∈J
ν
æ
}, где под д е й с т в и е м понимается непре-
рывная работа технического средства λ, размещенного на μ-м
пункте, проводимая в интервале времени (t
н
, t
к
]. Формально каж-
дое действие описывается кортежем вида <ν,
æ,μ,λ,t
н
,t
к
>, и тогда
множество планов выполнения операций управления U можно
задать в виде множества векторов u = ║u
j
║, компоненты которо-
го u
j
принимают значение 0 или 1 в зависимости от того, заплани-
ровано действие y
j
= <ν,æ,μ,λ,t
н
,t
к
>, или нет. Таким образом
U = {
║u
j
║, j∈J
ν
æ
, ν∈N, æ∈K } . (12.11)
Начало и конец временного интервала, когда может выпол-
няться действие, задается, исходя из следующих соображений:
а) введением предположения о том, что
t
н
и t
к
каждого дейст-
вия определяются началом и концом временного интервала
взаимодействия КА с ОКИК (ε
νμ
(t)=1);
б) дискретизацией интервалов времени, когда может выпол-
няться операция управления.
Программа выполнения операций управления представля-
ет собой с одной стороны программу реализации целевого назна-
259
чения КА на заданном временном интервале, а с другой стороны
программу работу средств управления, обеспечивающих эту реа-
лизацию. Так как в статических моделях процесс управления рас-
сматривается на всем интервале управления сразу, то среди всех
программ управления (планов) следует рассматривать только
такие, которые позволяют достигать заданного состояния ком-
плекса операций или
выполнить все необходимые для этого дей-
ствия. Это лежит в основе формализации условий выполнения
операций, среди которых следует различать:
а) условия, вытекающие из анализа особенностей, связанных
с технологией управления КА при реализации его целевого на-
значения;
б) условия, вытекающие из особенностей функционирования
средств управления, ограниченности их ресурсов.
Таким образом, первый
вид условий отражает целевые аспекты
выполнения операций управления, а второй ресурсные аспекты.
Следует отметить, что если ограничения, определяемые
условиями использования технических средств обслуживания
АСУ при управлении КА, носят в целом однородный характер для
КА различного целевого назначения, то ограничения, определяе-
мые технологией управления, существенно зависят от специфики
целевых задач, решаемых КА
. В этой связи моделью планирова-
ния операций управления КА не может служить какая-либо цело-
стная модель, но необходимо строить систему взаимосвязанных
моделей. При этом можно различать модели планирования опе-
раций для различных типов КА и модели согласования (коорди-
нации) планов КА.
Модели координации планов КА строятся на основе учета
ресурсных ограничений, накладываемых комплексом средств
управления. При построении таких моделей широко используются
методы декомпозиции, и особенности соответствующих подходов
далее будут рассмотрены в 15.5. Здесь же рассмотрим вариант
математической модели планирования операций управления КА,
учитывающий логические связи действий.
Пусть по результатам прогнозирования динамики относи-
тельного перемещения ν-го КА и технических средств управления
АСУ, размещенных на ОКИК, произведена оценка возможностей
управления КА на интервале времени Т. Это позволяет сформи-
ровать множество возможных действий Y
ν
= { y
j
, j∈J
ν
}, причем ка-
ждое действие y
j
определяется кортежем вида <ν,æ,μ,λ,t
н
,t
к
>. Каж-
дому действию можно сопоставить в соответствие булевую пере-
260
менную u
j
, которая может принимать значение 1 или 0 в зависи-
мости от того, запланировано j-е действие, или нет. Тогда множе-
ство возможных планов выполнения операций управления ν-го КА
определяется множеством векторов с компонентами u
j
∈{0,1}, j∈J
ν
U
ν
= { ║u
j
║, j∈J
ν
} . (12.12)
На множестве U
ν
необходимо задать множество допусти-
мых планов Δ
ν
⊆ U
ν
, отражающих технологию управления КА,
которая характеризуется логической взаимосвязью запланиро-
ванных действий.
Рассмотрим некоторые варианты формализованного опи-
сания логической связи действий (технологических ограничений)
в виде линейных ограничений.
1. Пусть необходимо выполнить не более (не менее, или
ровно) b ∈ {1, 2, 3,...} действий из заданного набора с номерами
из множества J. Такое условие формально можно записать в
ви-
де:
∑
∈Jj
u
j
≤ (≥) (=) b . (12.13)
2. Действия с номерами из J совместно выполняться не мо-
гут:
∑
∈Jj
u
j
≤ 1. (12.14)
3. Если выполнено i-е действие, то необходимо выполнить
ровно одно действие с номером из J, в противном случае дейст-
вия с номерами из J выполняться не могут:
u
i
-
∑
∈Jj
u
j
= 0 . (12.15)
4. Если выполнено действие с номером из S, то необходи-
мо выполнить хотя бы одно действие из Q:
∑
∈Sj
u
i
-
∑
∈Qj
u
j
= 0 . (12.16)
Рассмотренные варианты формализации технологических
ограничений позволяют при достаточной изобретательности опи-
сывать разнообразные комбинаторные зависимости между дей-
ствиями (или операциями), с помощью линейных ограничений,
накладываемых на булевые переменные. Таким образом, в виде
линейных неравенств можно представить довольно широкий
класс ситуаций, возникающих в процессе управления КА, и тем
самым сформировать множество допустимых
планов Δ
ν
.