Mikles J., Fikar M. Process Modelling, Identification, and Control
Подождите немного. Документ загружается.

118 4 Dynamical Behaviour of Processes
x(t)=e
At
x(0) +
t
0
e
A(t−τ)
Bu(τ )dτ (4.4)
y(t)=Cx(t)+Du(t) (4.5)
and replace u(t) with δ(t)weget
x(t)=e
At
x(0) + e
At
B (4.6)
y(t)=Ce
At
x(0) + Ce
At
B + Dδ(t) (4.7)
For x(0) = 0 then follows
y(t)=Ce
At
B + Dδ(t)=g(t) (4.8)
Consider the transfer function G(s)oftheform
G(s)=
b
n
s
n
+ b
n−1
s
n−1
+ ···+ b
0
a
n
s
n
+ a
n−1
s
n−1
+ ···+ a
0
(4.9)
The initial value theorem gives
g(0) = lim
s→∞
sG(s)=
⎧
⎨
⎩
∞, if b
n
=0
b
n−1
a
n
, if b
n
=0
0, if b
n
= b
n−1
=0
(4.10)
and g(t)=0fort<0.
If for the impulse response holds g(t)=0fort<0 then we speak about
causal system.
From the Duhamel integral
y(t)=
t
0
g(t −τ )u(τ)dτ (4.11)
follows that if the condition
t
0
|g(t)|dt<∞ (4.12)
holds then any bounded input to the system results in bounded system output.
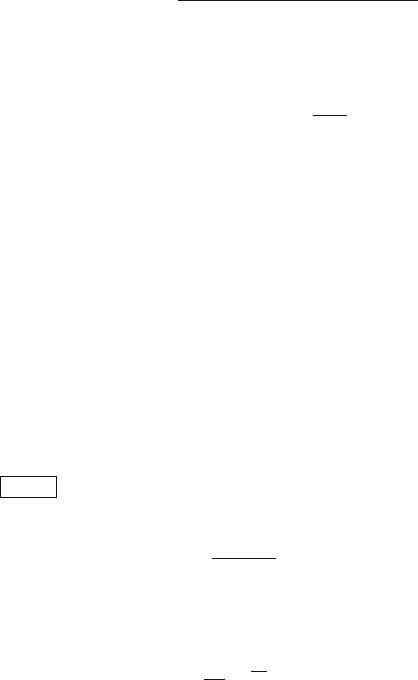
Example 4.1: Impulse response of the first order system
www
Assume a system with transfer function
G(s)=
1
T
1
s +1
then the corresponding weighting function is the inverse Laplace transform
of G(s)
g(t)=
1
T
1
e
−
t
T
1
The graphical representation of this function is shown in Fig. 4.1.
4.1 Time Responses of Linear Systems to Unit Impulse and Unit Step 119
0 1 2 3 4 5 6
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t / T
1
T
1
g
Fig. 4.1. Impulse response of the first order system
4.1.2 Unit Step Response
Step response is a response of a system with zero initial conditions to the unit
step function 1(t). Consider a system with transfer function G(s) for which
holds
Y (s)=G(s)U(s) (4.13)
If the system input variable u(t) is the unit step function
u(t)=1(t) (4.14)
then the system response (for zero initial conditions) is
y(t)=L
−1
G(s)
1
s
(4.15)
From this equation it is clear that step response is a time counterpart of the
term G(s)/s or equivalently G(s)/s is the Laplace transform of step response.
The impulse response is the time derivative of the step response.
Consider again the state-space approach. For u(t)=1(t) we get from (3.47)
x(t)=e
At
x(0) +
t
0
e
A(t−τ)
Bu(t)dτ (4.16)
x(t)=e
At
x(0) + e
At
(−A
−1
)(e
−At
− I)B (4.17)
x(t)=e
At
x(0) + (e
At
− I)A
−1
B (4.18)
y(t)=Ce
At
x(0) + C(e
At
− I)A
−1
B + D (4.19)
For x(0) = 0 holds
y(t)=C(e
At
− I)A
−1
B + D (4.20)
120 4 Dynamical Behaviour of Processes
If all eigenvalues of A have negative real parts, the steady-state value of
step response is equal to G(0). This follows from the Final value theorem (see
page 58)
lim
t→∞
y(t) = lim
s=0
G(s)=−CA
−1
B + D =
b
0
a
0
(4.21)
The term b
0
/a
0
is called (steady-state) gain of the system.
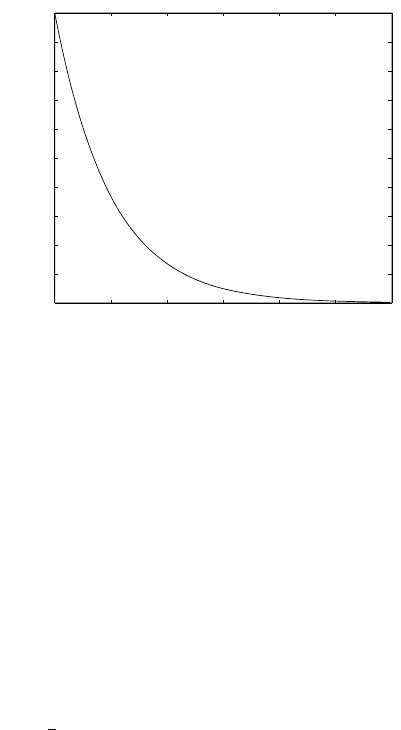
Example 4.2: Step response of first order system
www
Assume a process that can be described as
T
1
dy
dt
+ y = Z
1
u
This is an example of the first order system with the transfer function
G(s)=
Z
1
T
1
s +1
The corresponding step response is given as
y(t)=Z
1
(1 −e
−
t
T
1
)
Z
1
the gain and T
1
time constant of this system. Step response of this
system is shown in Fig 4.2.
0 2 4 6 8
0
0.2
0.4
0.6
0.8
1
1.2
t
y / Z
1
T
1
T
1
T
1
Fig. 4.2. Step response of a first order system
Step responses of the first order system with various time constants are
shown in Fig 4.3. The relation between time constants is T
1
<T
2
<T
3
.
4.1 Time Responses of Linear Systems to Unit Impulse and Unit Step 121
0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t
y / Z
1
T
1
=1
T
1
=2
T
1
=3
Fig. 4.3. Step responses of a first order system with time constants T
1
,T
2
,T
3
Example 4.3: Step responses of higher order systemswww
Consider two systems with transfer functions of the form
G
1
(s)=
Z
1
T
1
s +1
,G
2
(s)=
Z
2
T
2
s +1
connected in series. The overall transfer function is given as their product
Y (s)
U(s)
=
Z
1
Z
2
(T
1
s + 1)(T
2
s +1)
The corresponding step response function can be calculated as
y(t)=Z
1
Z
2
1 −
T
1
T
1
− T
2
e
−
t
T
1
+
T
2
T
1
− T
2
e
−
t
T
2
or
y(t)=Z
1
Z
2
1 −
T
1
T
2
T
1
− T
2
1
T
2
e
−
t
T
1
−
1
T
1
e
−
t
T
2
Consider now a second order system with the transfer function given by
G(s)=
Y (s)
U(s)
=
Z
s
T
2
k
s
2
+2ζT
k
s +1
As it was shown in the Example 3.12, such transfer function can result
from the mathematical model of a U-tube.
The characteristic form of the step response depends on the roots of the
characteristic equation
T
2
k
s
2
+2ζT
k
s +1=0
122 4 Dynamical Behaviour of Processes
If T
k
represents the time constant then the dumping factor ζ plays a crucial
role in the properties of the step response. In the following analysis the
case ζ<0 will be automatically excluded as that corresponding to an
unstable system. We will focus on the following cases of roots:
Case a: ζ>1 - two different real roots,
Case b: ζ = 1 - double real root,
Case c: 0 <ζ<1 - two complex conjugate roots.
Case a: If ζ>1 then the characteristic equation can be factorised as
follows
T
2
k
s
2
+2ζT
k
s +1=(T
1
s + 1)(T
2
s +1)
where
T
2
k
= T
1
T
2
2ζT
k
= T
1
+ T
2
or
T
k
=
√
T
1
T
2
ζ =
T
1
+ T
2
2
√
T
1
T
2
Another possibility how to factorise the characteristic equation is
T
2
k
s
2
+2ζT
k
s +1=
T
k
ζ −
ζ
2
− 1
s +1
T
k
ζ +
ζ
2
− 1
s +1
Now the constants T
1
,T
2
are of the form
T
1
=
T
k
ζ −
ζ
2
− 1
,T
2
=
T
k
ζ +
ζ
2
− 1
Case b: If ζ = 1 then T
1
= T
k
, T
2
= T
k
.
Case c: If 0 <ζ<1 then the transfer function can be rewritten as
G(s)=
Z
s
T
2
k
s
2
+
2ζ
T
k
s +
1
T
2
k
and the solution of the characteristic equation is given by
s
1,2
=
−
2ζ
T
k
±
,
4
ζ
2
T
2
k
− 4
1
T
2
k
2
s
1,2
=
−ζ ±
ζ
2
− 1
T
k
The corresponding transfer functions are found from the inverse Laplace
transform and are of the form
Case a:
y(t)=Z
s
1 −
T
1
e
−t/T
1
− T
2
e
−t/T
2
T
1
− T
2
4.1 Time Responses of Linear Systems to Unit Impulse and Unit Step 123
Case b:
y(t)=Z
s
1 −
1 −
t
T
k
e
−t/T
k
Case c:
y(t)=Z
s
-
1 −
1
1 −ζ
2
e
−
ζ
T
k
t
sin
1 −ζ
2
T
k
t + arctan
1 −ζ
2
ζ
.
For the sake of completeness, if ζ = 0 the step response contains only a
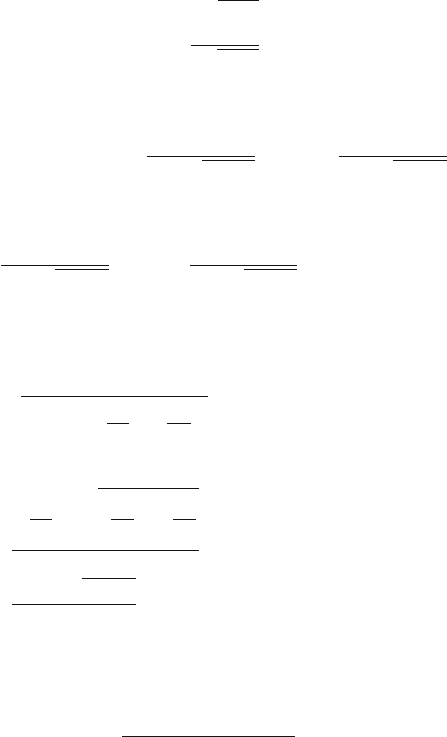
sinus function. Step responses for various values of ζ are shown in Fig. 4.4.
0 5 10 15
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
t
y / Z
s
ζ = 1.3
ζ = 1.0
ζ = 0.5
ζ = 0.2
Fig. 4.4. Step responses of the second order system for the various values of ζ
Consider now the system consisting of two first order systems connected in
a series. The worst case concerning system inertia occurs if T
1
= T
2
. In this
case the tangent in the inflex point has the largest value. If T
2
T
1
then
the overall characteristic of the system approaches a first order system
with a time constant T
1
.
A generalisation of this phenomenon shows that if the system consists of
n-in-series connected systems, then the system inertia is the largest if all
time constants are equal.
If i-th subsystem is of the form
G
i
(s)=
Z
i
T
i
s +1
then for the overall transfer function yields
G(s)=
Y (s)
U(s)
=
+
n
i=1
Z
i
+
n
i=1
(T
i
s +1)
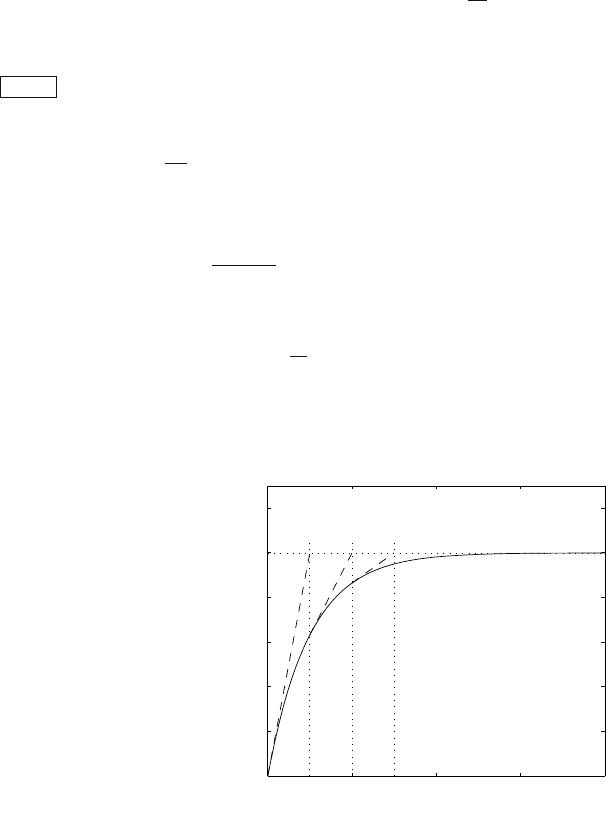
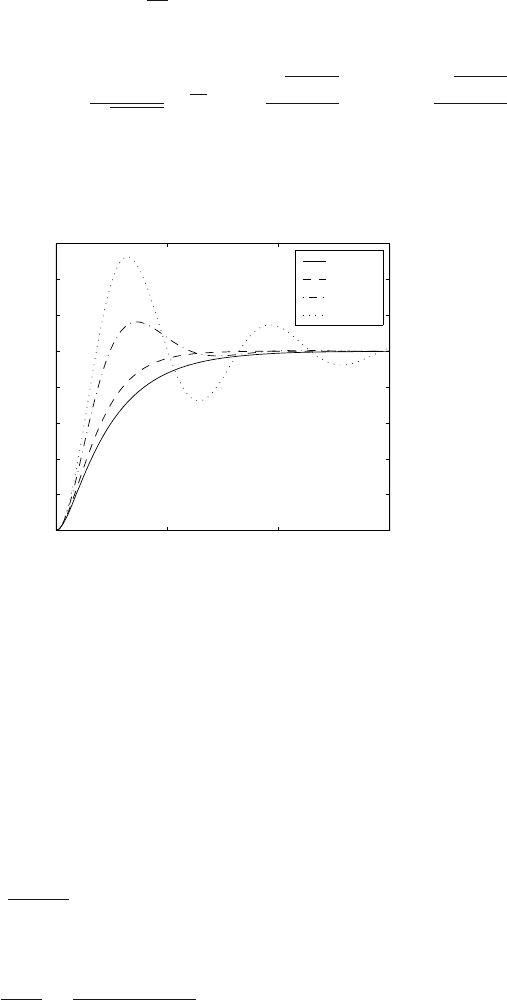
124 4 Dynamical Behaviour of Processes
If T
s
= T
1
= T
2
= ··· = T
n
then the system residence time will be the
largest. Consider unit step function on input and Z
s
= Z
1
Z
2
···Z
n
.The
step responses for various n are given in Fig. 4.5.
0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t / T
y / Z
s
n = 1
n = 2
n = 3
n = 4
Fig. 4.5. Step responses of the system with n equal time constants
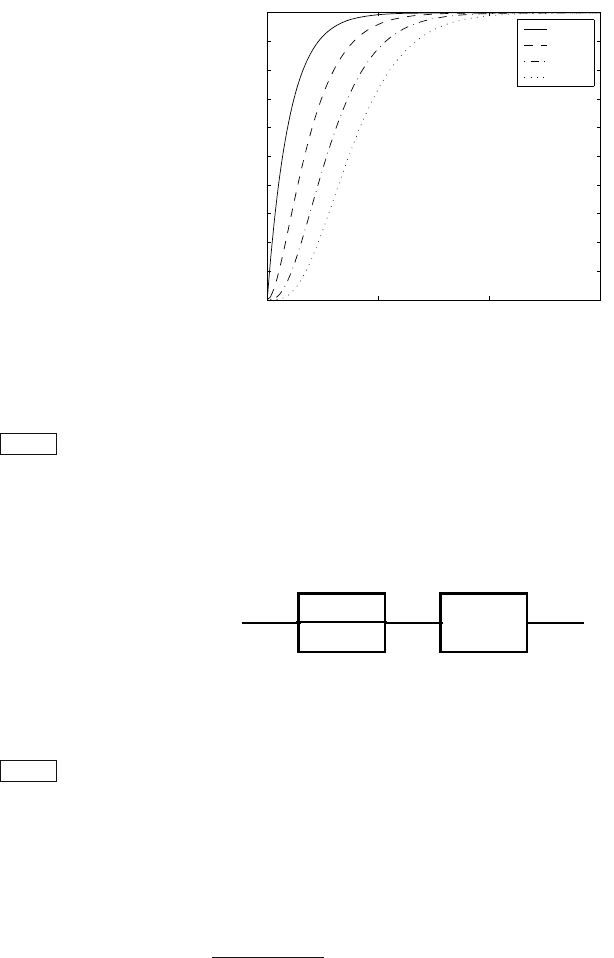
Example 4.4: Step response of the n-th order system connected in a serieswww
with time delay
Fig. 4.6 shows the block scheme of a system composed of n-th order system
and pure time delay connected in a series. The corresponding step response
is shown in Fig. 4.7 where it is considered that n =1.
Z
s
(T
s
s +1)
n
e
−T
d
s
- - -
U(s) Y (s)
Fig. 4.6. Block scheme of the n-th order system connected in a series with time
delay
Example 4.5: Step response of 2nd order system with the numerator B(s)=www
b
0
+ b
1
s
As it was shown in Example 3.14, some transfer function numerators of
the CSTR can contain first order polynomials. Investigation of such step
responses is therefore of practical importance. An especially interesting
case is when the numerator polynomial has a positive root.
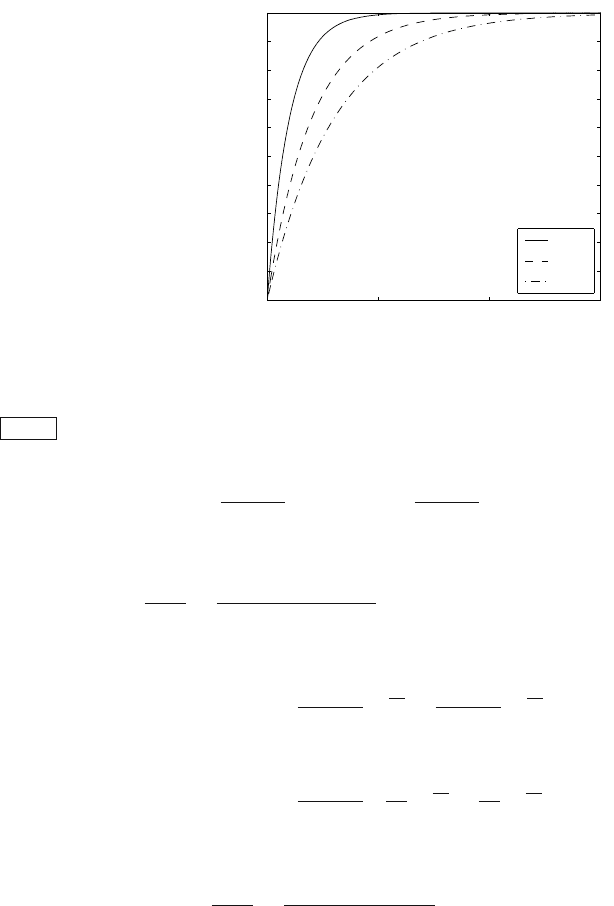
Consider for example the following system
G(s)=
b
1
s +1
s
2
+2.6s +1
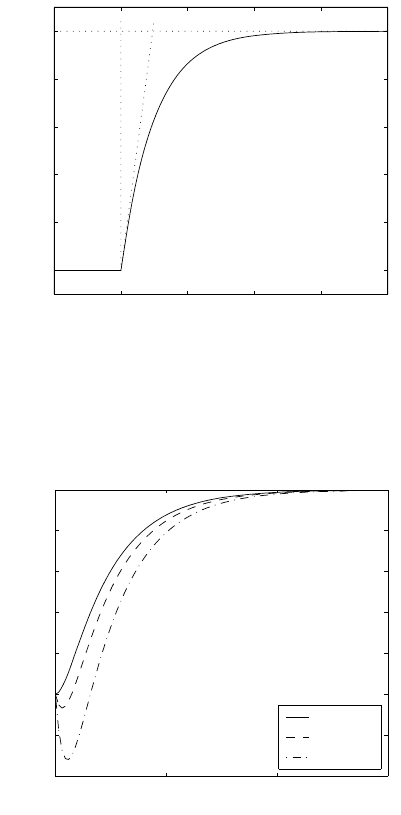
4.2 Computer Simulations 125
0 2 4 6 8 10
0
0.2
0.4
0.6
0.8
1
t
y / Z
s
T
d
T
s
Fig. 4.7. Step response of the first order system with time delay
The corresponding step response is illustrated in Fig. 4.8.
0 5 10 15
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
t
y / (b
0
a
0
)
b
1
= 0.0
b
1
= −0.5
b
1
= −1.5
Fig. 4.8. Step response of the second order system with the numerator B(s)=b
1
s+1
4.2 Computer Simulations
As it was shown in the previous pages, the investigation of process behaviour
requires a solution of differential equations. Analytical solutions can only be
found for processes described by linear differential equations with constant
coefficients. If the differential equations that describe dynamical behaviour of
126 4 Dynamical Behaviour of Processes
a process are nonlinear, then it is either very difficult or impossible to find the
analytical solution. In such cases it is necessary to utilise numerical methods.
These procedures transform the original differential equations into difference
equations that can be solved iteratively on a computer. The drawback of
this type of solution is a loss of generality as numerical values of the initial
conditions, coefficients of the model, and its input functions must be specified.
However, in the majority of cases there does not exist any other approach as
a numerical solution of differential equations. The use of numerical methods
for the determination of process responses is called simulation. There is a
large number of simulation methods. We will explain Euler and Runge-Kutta
methods. The Euler method will be used for the explanation of principles of
numerical methods. The Runge-Kutta method is the most versatile approach
that is extensively used.
4.2.1 The Euler Method
Consider a process model in the form
dx(t)
dt
= f(t, x(t)),x(t
0
)=x
0
(4.22)
At first we transform this equation into its difference equation counterpart.
We start from the definition of a derivative of a function
dx
dt
= lim
Δt→0
x(t +Δt) −x(t)
Δt
(4.23)
if Δt is sufficiently small, the derivative can be approximated as
dx
dt
.
=
x(t +Δt) −x(t)
Δt
(4.24)
Now, suppose that the right hand side of (4.22) is constant over some interval
(t, t +Δt) and substitute the left hand side derivative from (4.24). Then we
can write
x(t +Δt) −x(t)
Δt
= f(t, x(t)) (4.25)
or
x(t +Δt)=x(t)+Δtf (t, x(t)) (4.26)
The assumptions that led to Eq. (4.26) are only justified if Δt is sufficiently
small. At time t = t
0
we can write
x(t
0
+Δt)=x(t
0
)+Δtf (t
0
,x(t
0
)) (4.27)
and at time t
1
= t
0
+Δt

4.2 Computer Simulations 127
x(t
1
+Δt)=x(t
1
)+Δtf (t
1
,x(t
1
)) (4.28)
In general, for t = t
k
, t
k+1
= t
k
+Δt Eq. (4.26) yields
x(t
k+1
)=x(t
k
)+Δtf (t
k
,x(t
k
)) (4.29)
Consider now the following differential equation
dx(t)
dt
= f(t, x(t),u(t)),x(t
0
)=x
0
(4.30)
We assume again that the right hand side is constant over the interval
(t
k
,t
k+1
) and is equal to f(t
k
,x(t
k
),u(t
k
)). Applying the approximation (4.24)
yields
x(t
k+1
)=x(t
k
)+Δtf (t
k
,x(t
k
),u(t
k
)) (4.31)
In this equation we can notice that the continuous-time variables x(t),u(t)
have been replaced by discrete variables x(t
k
),u(t
k
). Let us denote
x(t
k
) ≡ x
k
(4.32)
u(t
k
) ≡ u
k
(4.33)
and we obtain a recursive relation called difference equation
x
k+1
= x
k
+Δtf (t
k
,x
k
,u
k
) (4.34)
that can be solved recursively for k =0, 1, 2,... for the given initial value x
0
.
Equation (4.34) constitutes the Euler method of solving the differential
equation (4.30) and it is easily programmable on a computer. The difference
h = t
k+1
− t
k
is usually called integration step.
As the basic Euler method is only very crude and inaccurate, the following
modification of modified Euler method was introduced
x
k+1
= x
k
+
h
2
(f
k
+ f
k+1
) (4.35)
where
t
k
= t
0
+ kh, k =0, 1, 2,...
f
k
= f(t
k
,x(t
k
),u(t
k
))
f
k+1
= f[t
k+1
,x(t
k
)+hf(t
k
,x(t
k
),u(t
k
)),u(t
k+1
)]
4.2.2 The Runge-Kutta method
This method is based on the Taylor expansion of a function. The Taylor
expansion helps to express the solution x(t +Δt) of a differential equation in
relation to x(t) and its time derivatives as follows