Middleton W.M. (ed.) Reference Data for Engineers: Radio, Electronics, Computer and Communications
Подождите немного. Документ загружается.

36-1
2
REFERENCE DATA FOR ENGINEERS
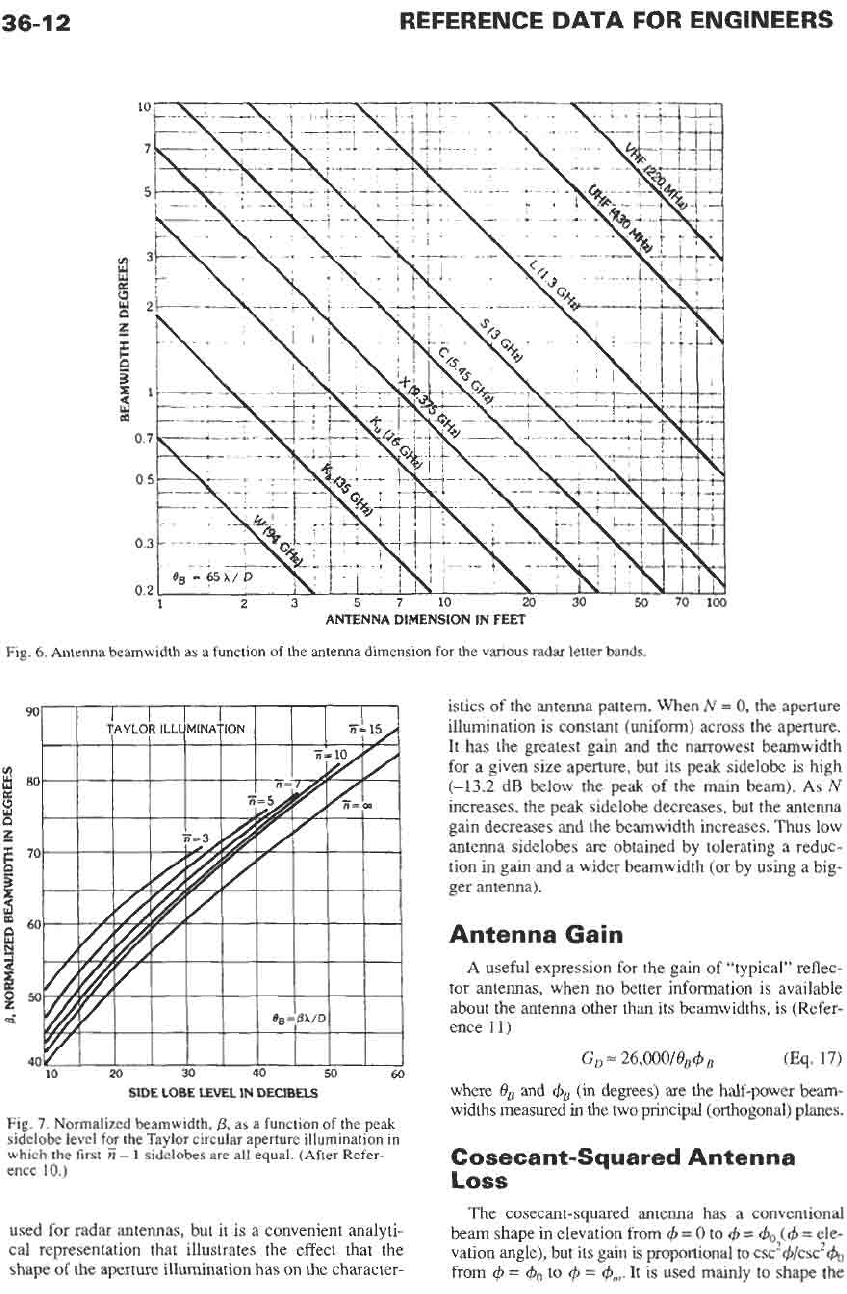
Fig.
6.
Antenna beamwidth as a function of the antenna dimension for the
various
radar letter bands.
SIDE
LOBE LEVEL
IN
DECIBELS
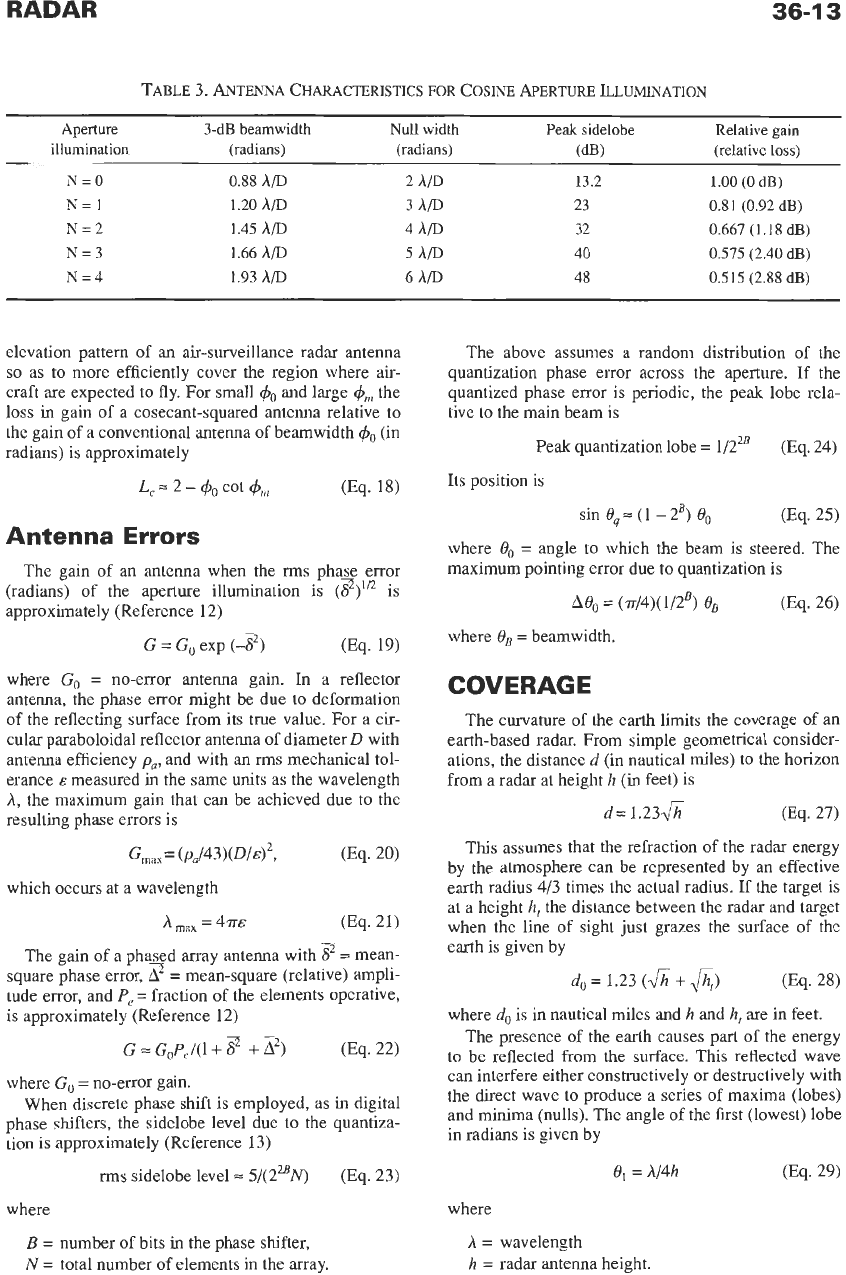
Fig.
7.
Normalized beamwidth,
p,
as a function
of
the peak
sidelobe level for
the
Taylor circular aperture illumination in
which the first
E
-
1
sidelobes are all
equal.
(After Refer-
ence
10.)
used for radar antennas, but it is a convenient analyti-
cal representation that illustrates the effect that the
shape of
the
aperture illumination has
on
the
character-
istics
of
the antenna pattern. When
N
=
0,
the aperture
illumination is constant (uniform) across the aperture.
It has the greatest gain and the narrowest beamwidth
for a given size aperture, but its peak sidelobe is high
(-13.2 dB below the peak
of
the main beam).
As
N
increases, the peak sidelobe decreases, but the antenna
gain decreases and the beamwidth increases.
Thus
low
antenna sidelobes are obtained by tolerating a reduc-
tion in gain and a wider beamwidth (or by using a big-
ger antenna).
Antenna Gain
A
useful expression for the gain of “typical” reflec-
tor antennas, when
no
better information is available
about the antenna other than its beamwidths, is (Refer-
ence 11)
Go
=
26,000/0B4B
(Eq.
17)
where
0,
and
+B
(in
degrees) are the half-power beam-
widths measured
in
the
two
principal (orthogonal) planes.
Cosecant-Squared Antenna
Loss
The cosecant-squaed antenna has a conventional
beam shape in elevation from
4
=
0
to
4
=
4o
(4
=
ele-
vation angle), but its gain is proportional to cscz~/csc2+o
from
4
=
+,,
to
=
4nl.
It
is
used mainly to shape the
36-1
3
TABLE
3.
ANTENNA
CHARACTERISTICS
FOR
COSINE AF’ERTURE
ILLUMINATION
Aperture
3-dB
beamwidth
Null width Peak sidelobe
Relative gain
illumination
(radians)
(radians)
(dB)
(relative loss)
~~~
N=O 0.88
AD
2
AP
13.2
1.00
(0
dB)
N= 1 1.20
AD
3
AD
23 0.81 (0.92
dB)
N=2
1.45
AD
4
AP
32
0.667
(1.18
dB)
N=3
1.66
AD
5
AP
40
0.575
(2.40
dB)
N=4 1.93
AD
6
AP
48 0.515 (2.88
dB)
elevation pattern of an air-surveillance radar antenna
so
as to more efficiently cover the region where
air-
craft are expected
to
fly. For small
$,,
and large
&
the
loss in gain of a cosecant-squared antenna relative to
the gain of a conventional antenna of beamwidth
+,,
(in
radians) is approximately
L,=
2
-
$,,
cot
$m
(Eq. 18)
Antenna
Errors
The gain of an antenna when the
rms
phase error
(radians) of the aperture illumination is
(15’)~’’
is
approximately (Reference
12)
G
=
G,
exp
(-3)
(Eq.
19)
where
Go
=
no-error antenna gain. In a reflector
antenna, the phase error might be due to deformation
of the reflecting surface from its true value. For a cir-
cular paraboloidal reflector antenna of diameter
D
with
antenna efficiency
pa,
and with an rms mechanical tol-
erance
E
measured
in
the same units as the wavelength
A,
the maximum gain that can be achieved due to the
resulting phase errors is
which occurs at a wavelength
The gain of a phased array antenna with
3
=
mean-
square phase error,
A2
=
mean-square (relative) ampli-
tude error, and
P,
=
fraction of the elements operative,
is approximately (Reference
12)
G
=
~g,i(i
+
2
+
F)
(Eq.
22)
where
Go
=
no-error gain.
When discrete phase shift is employed, as
in
digital
phase shifters, the sidelobe level due to the quantiza-
tion is approximately (Reference
13)
rms
sidelobe level
=
5/(2?Q
(Eq.
23)
where
B
=
number of bits
in
the phase shifter,
N
=
total number of elements in the array.
The above assumes a random distribution of the
quantization phase error across the aperture. If the
quantized phase error is periodic, the peak lobe rela-
tive to the main beam is
Peak quantization lobe
=
1/22B
(Eq.
24)
Its position is
sin
oq=
(1 -27
0,
AO,
=
(~/4)(1/2~)
0,
(Eq.
25)
where
0,
=
angle
to
which the beam is steered. The
maximum pointing error due to quantization is
(Eq.
26)
where
0,
=
beamwidth.
COVERAG
E
The curvature
of
the earth limits the coverage of
an
earth-based radar. From simple geometrical consider-
ations, the distance
d
(in nautical miles) to the horizon
from a radar at height
h (in
feet) is
d=
1.234%
(Eq.
27)
This assumes that the refraction of the radar energy
by the atmosphere can be represented by an effective
earth radius
413
times the actual radius. If the target is
at a height
h,
the distance between the radar and target
when the line of sight just grazes the surface
of
the
earth is given by
do
=
1.23
(4%
+
&)
(Eq.
28)
where
do
is in nautical miles and
h
and
h,
are
in feet.
The presence of the earth causes part of the energy
to be reflected from the surface. This reflected wave
can interfere either constructively or destructively with
the direct wave to produce a series of maxima (lobes)
and minima (nulls). The angle of the first (lowest) lobe
in radians is given by
=
A/4h
(Eq.
29)
where
A=
wavelength
h
=
radar antenna height.
36-1
4
REFERENCE
DATA
FOR
ENGINEERS
Both
A
and h are measured in the same units. This
equation assumes a flat earth.
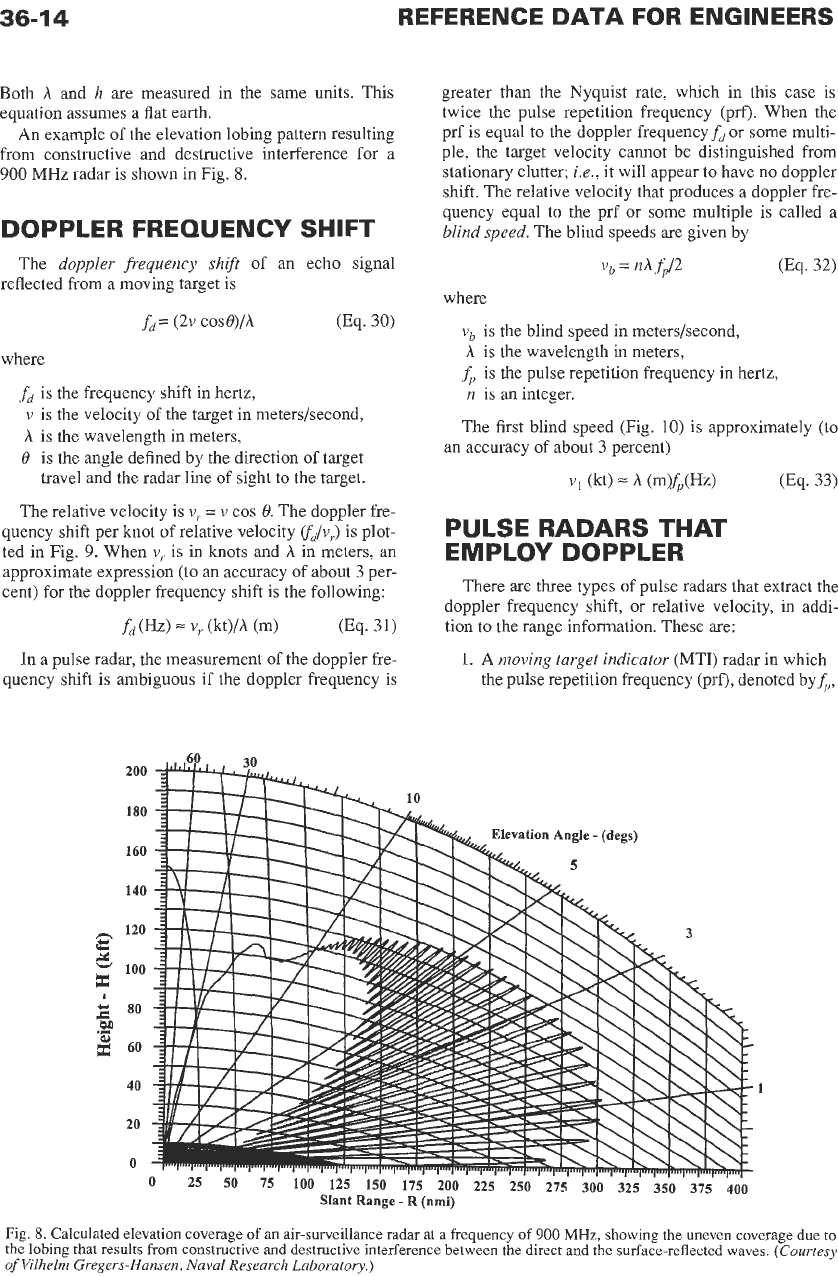
An example of the elevation lobing pattern resulting
from constructive and destructive interference for a
900
MHz radar is shown in Fig.
8.
DOPPLER FREQUENCY SHIFT
The doppler
frequency
shift of an echo signal
reflected from a moving target is
fd=
(2v
cosO)/h
m.
30)
where
fd
is the frequency shift in hertz,
v
is the velocity of the target in meters/second,
A
is the wavelength in meters,
O
is the angle defined by the direction of target
travel and the radar line of sight to the target.
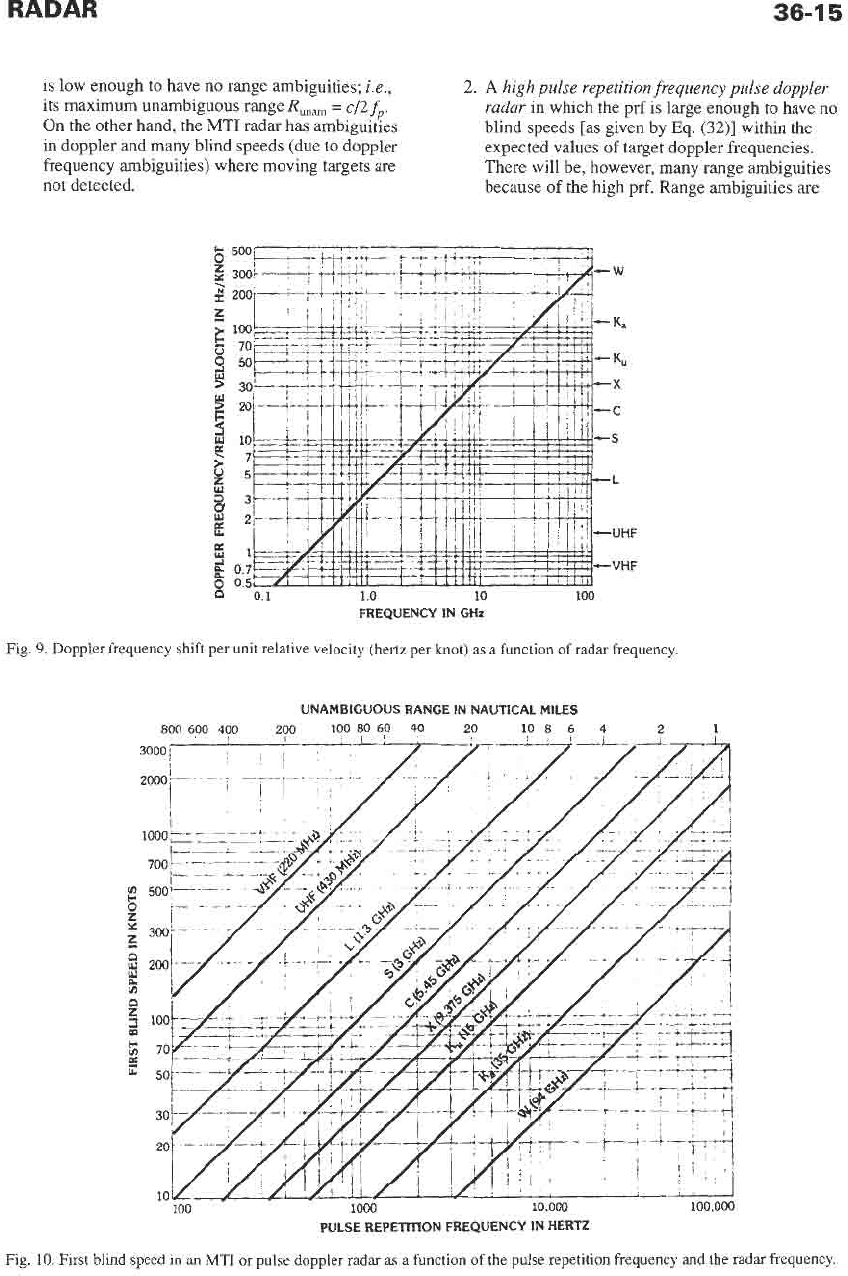
The relative velocity is
v,.
=
v
cos 0. The doppler fre-
quency shift per knot of relative velocity
fd/v,)
is plot-
ted in Fig.
9.
When
v,
is
in
knots and
A
in meters,
an
approximate expression
(to
an accuracy of about
3
per-
cent) for the doppler frequency shift is the following:
fd
(Hz)
v,
(m) (Eq.
31)
In
a pulse radar, the measurement of the doppler fre-
quency shift is ambiguous if the doppler frequency is
200
180
160
140
120
c
X
c
100
I
2
80
M
4
60
.I
40
20
0
greater than the Nyquist rate, which in this case
is
twice the pulse repetition frequency (prf). When the
prf is equal to the doppler frequency
fd
or some multi-
ple, the target velocity cannot be distinguished from
stationary clutter;
ie.,
it will appear to have no doppler
shift. The relative velocity that produces a doppler fre-
quency equal to the prf or some multiple is called a
blind speed. The blind speeds are given by
where
vb
is the blind speed in meters/second,
A
is the wavelength in meters,
fp
is the pulse repetition frequency in hertz,
n
is an integer.
The first blind speed (Fig.
10)
is approximately (to
an accuracy of about
3
percent)
v1
(kt)
=
A
(mlfp(W (Eq.
33)
PULSE RADARS THAT
EMPLOY DOPPLER
There are three types of pulse radars that extract the
doppler frequency shift, or relative velocity,
in
addi-
tion to the range information. These are:
1.
A moving target indicator (MTI) radar in which
the pulse repetition frequency (prf), denoted by
fp,
Fig.
8.
Calculated elevation coverage
of
an air-surveillance radar at a frequency
of
900
MHz,
showing the uneven cove1
the lobing that results
from
constructive and destructive interference between the direct and the surface-reflected waves.
of
Vilhelm Gregers-Hansen, Naval Research Laboratov.)
'age
(C,
due
to
mrtesy
RADAR
36-1
5
is low enough to have
no
range ambiguities;
it.,
its maximum unambiguous range
R,,,
=
c/2
fp.
On the other hand, the
MTI
radar has ambiguities
in
doppler and many blind speeds (due to doppler
frequency ambiguities) where moving targets are
not detected.
2.
A
high
pulse repetition frequency pulse doppler
radar
in which the prf is large enough to have
no
blind speeds [as given by Eq.
(32)]
within the
expected values
of
target doppler frequencies.
There will be, however, many range ambiguities
because
of
the high prf. Range ambiguities are
Fig.
9.
Doppler frequency shift per unit relative velocity (hertz
per
knot)
as
a
function of radar frequency.
PULSE REPETITION FREQUENCY IN HERTZ
Fig.
10.
First
blind speed in
an
MTI
or pulse doppler radar as a function
of
the pulse repetition frequency and the radar frequency.
resolved and the true range is found by transmit-
ting three separate waveforms, each at a different
prf.
(In
theory, only two different prfs are
required to resolve range ambiguities, but in prac-
tice at least three are needed.) An advantage of a
high-prf pulse doppler radar is that it can readily
detect targets with a high relative-velocity since
such echoes do not compete with the echoes from
clutter that are at lower doppler frequencies. It
has much poorer performance, however, against
low relative-velocity targets which compete with
the large clutter echoes seen by this type of radar
in its antenna sidelobes because of the high prf.
3.
A
medium prfpulse doppler radar
has both range
and doppler ambiguities. It will not detect high
relative-velocity targets as well as can a high-prf
pulse doppler radar, but it will detect low relative-
velocity targets better because its low prf sees less
clutter than does the high prf.
Most ground-based air-surveillance radars that must
see aircraft in the midst of clutter
are
generally MTI
radars. When flown in an aircraft for purposes of air-sur-
veillance, these are called AMTI, or
airborne moving
target indicator radar.
AMTI
radars
are
very good for
airborne air-surveillance radars at
UHF,
but result in
too
many blind speeds when employed at the higher micro-
wave frequencies. The high-prf and the medium-prf
pulse doppler radars can both be used for airborne
air-
surveillance purposes at the higher frequencies. (The
S-
band AWACS, or
AN/APY-l,
airborne air-surveillance
radar utilizes
a
high-prf pulse doppler waveform.)
An
X-band fighter/attack radar in a modern military aircraft
might employ
on
a time-shared basis
three
widely dif-
fering prfs, depending
on
the
operational situation.
When no clutter is present (as when the antenna beam is
looking up above the surface of the earth), a low prf
waveform without any doppler processing might be
employed. (The low prf waveform will provide the
greatest range, if no clutter is present.) When searching
for a target in clutter, the high prf and
the
medium-prf
pulse doppler waveforms might be interleaved. The high
prf would be looking for high-speed approaching targets
at long range and the medium prf would be looking for
slower-speed targets at shorter ranges.
The doppler frequency shift is important for many
purposes in radar.
In addition to the
MTI,
AMTI,
and
pulse doppler radars, the doppler frequency is the key
to such radars as
=
Doppler weather radars
Nexrad,
whose output is regularly shown on TV
weather broadcasts.
Terminal Doppler Weather Radar (TDWR).
These
are located in the vicinity of major airports to
warn aircraft, that are landing or taking-off, of
the presence of dangerous wind shear.
Windprojiler,
that measures as a function of alti-
tude the wind speed and direction for both
weather prediction and the efficient routing of
aircraft.
The
Airborne weather-avoidance doppler radar,
that
detects dangerous wind shear to warn the pilot
of danger during take-off or landing.
Synthetic aperture radar
(SAR),
(for mapping a
scene on the surface of the earth, and the
inverse
synthetic aperture radar
(ISAR),
for imaging a
target well enough to recognize
it
from other sim-
ilar targets. (SAR is more usually thought
of
as an
antenna synthesized in a digital processor, but it
was originally invented as a doppler radar and can
be described as depending on the doppler effect.)
Doppler navigator,
a multi-beam radar which can
provide the vector velocity of
an
aircraft which
carries it.
HF
over-the-horizon radar,
which depends
on
the
doppler frequency to detect aircraft and ships in
the presence of large clutter echoes. The doppler
spectrum of the sea echo obtained by an
HF
radar
can also be used to extract the strength and direc-
tion of the winds over the ocean.
continuous wave
(CW) radar also depends
on
the
doppler frequency shift to detect targets
&
clutter and/
or to measure relative velocity.
MTI
RADAR
The MTI radar uses a digital implementation of a
time-domain filter composed of “delay lines” to pass
desired moving targets, but to reject stationary clutter.
The simplest type of MTI time-domain filter uses a
single delay line to subtract the received radar echoes
from the echoes received one pulse repetition period
previously. A single delay-line canceler has a fre-
quency response given by
H,(f)
=
2
sin
7cfdTp
(Eq.
34)
where
fd
=
doppler frequency,
Tp
=
pulse repetition period.
When
n
single delay-line cancelers are used in cas-
cade the frequency response is
H,,(f)
=
2”
sin”7cfdTp
(Eq.
35)
An arrangement of
n
delay lines in cascade with
N
=
n
+
1
taps (one at the input of each delay line and one
at the output of the last delay line), whose outputs are
weighted by the coefficients of the binomial series
with alternating sign before summing, produces a
response equivalent to that of
Eq.
35
for then cascaded
delay-line cancelers. This is sometimes called an
N-
pulse canceler
and is an example of a
transversal
filter
(also called a
nonrecursive
filter). The transversal filter
may be used with weightings other than the binomial
coefficients with alternating sign to give a tailored fre-
quency response. Feedback can also be employed
in
a
cascade of delay-line cancelers to shape the frequency
response further. This is called a
recursive
filter. Its
“infinite” duration transient response, however, can
36-1
7
limit its usefulness, especially for military radars sub-
ject to hostile electronic countermeasures.
Many air-surveillance radars used for air-traffic con-
trol employ a staggered prf rather than a constant prf.
A staggered or multiple prf MTI radar is one that uses
more than one pulse repetition period. Four or five
stagger periods might be used. For example, the peri-
ods of an L-band air surveillance radar might be in the
ratio of 28:30:27:3
1
(Reference
15).
A
staggered prf is
used to increase the first blind speed beyond that given
by Eq. 32. If the individual periods of the multiple
PRF waveform are designated by TI, T,,
.
.
.
,Tv,
and if
they
are
related by the ratios
n,/T,
=
n2/T,
=
.
,
.
=
n,/T,\,,
where
n,, n,,
.
.
.
,
n,v
are integers, then the first blind
speed when N different periods are used is
vi
=
[(nl
+
n2
+
. . .
+
nN)/~vB (Eq.
36)
where v, is the first blind speed as given by Eq. 32 for
a nonstaggered waveform with a constant period equal to
the average of the N periods, or
(T,
+
T2
+
. . .
+
T,)/N.
In the above example with four staggered periods,
n1
=
25,
n2
=
30,
n3
=
27,
and
n4
=
31, the first blind speed
of the staggered waveform is
28.25
times that of a
waveform with constant pulse repetition period. The
staggered prf can also be used with a transversal filter
of unequal spacings and with amplitude weights to
shape the frequency response of the doppler filter.
Still another method for providing doppler filtering
in an MTI or pulse doppler radar is to generate a bank
of narrow-band doppler filters. These can be obtained
using a transversal filter with phase weights rather than
amplitude weights.
N
pulses processed as a filter bank
will produce N contiguous narrow-band filters. The fil-
ter bank has the advantage over other methods in (1)
separating desired moving targets from undesired
moving clutter (such as rain),
(2)
providing a measure
of the target’s radial velocity, and (3) improving the
signal-to-noise ratio compared
to other filters. Of all
these advantages, the first (separating aircraft echoes
from rain) has been the most important.
In the above, several methods for providing doppler
filtering have been briefly mentioned. Each has its
advantages and limitations, and no one method is
superior
in
all cases to the rest. Thus “engineering
judgement”
is
needed when selecting the type of filter-
ing to be used in any doppler radar application.
MTI
Performance Limitations
The performance measure used
to
describe the abil-
ity of an MTI to see targets
in
clutter is the
MTI
Improvement Factor, defined as the signal-to-clutter
ratio at the output of the MTI processor divided by the
signal-to-clutter ratio at the input, averaged uniformly
over
all
target relative velocities of interest. Clutter
Attenuation is the ratio of the clutter power at the can-
celer input to the clutter residue at the output, normal-
ized to the attenuation
of
a single pulse passing
through the unprocessed channel of the canceler.
Sub-
clutter Visibility is the ratio by which the target echo
power may be weaker than the clutter echo power and
still be detected with specified detection and false
alarm probabilities. All target relative velocities
are
assumed equally likely.
The performance of an MTI radar is limited by clut-
ter fluctuations, antenna scanning, and equipment
instabilities.
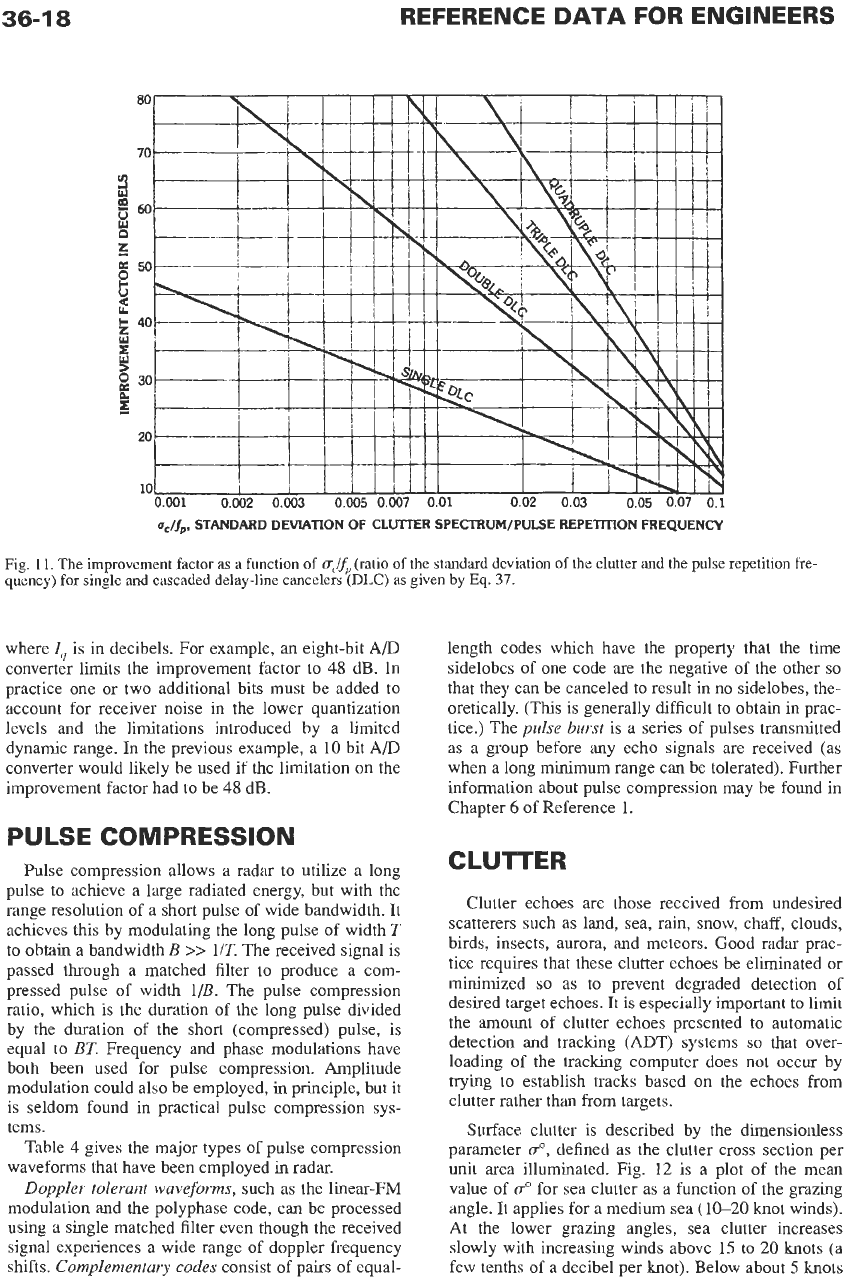
Clutter Fluctuations-The improvement factor of
an N-pulse canceler with
n
=
N
-
1
delay lines, or
n
cascaded delay-line cancelers, is
where
fp
=
pulse repetition frequency,
a,
=
standard deviation of the clutter spectrum
This is plotted in Fig.
11.
The standard deviation of
the clutter spectrum in hertz is related to the standard
deviation of the velocity spread in meters/second by
the expression
uc
=
2uv/h.
“Typical” values of
a,
are
(Reference
14):
which is assumed to be of Gaussian shape.
Heavily wooded hills,
20
mph wind:
0.2
m/s
Sparsely wooded hills, calm day:
0.02
m/s
Sea echo, windy day:
0.9
m/s
Rain clouds:
2
m/s
Chaff
1
m/s
The Gaussian model (and Eq. 37) does not apply for
heavy clutter. The exponential clutter model needs to
be used when improvement factors are greater than
20
or
30
dB, as has been described by Billingsley (Refer-
ence 16).
ment factor for
n
delay-line cancelers in cascade is
Antenna Scanning-The limitation to the improve-
I,
=
(2”/n!)
x
(0.6n,)2”
0%.
38)
where
nB
=
number of pulses received within the half-
power beamwidth as the antenna scans by
the
target.
Equipment InstabilitieeThe improvement factor
in a doppler radar can be limited by the instabilities in
such things as the transmitter frequency, stalo and
coho oscillator phase or frequency, phase shift in the
transmitter, and changes in the pulse width and pulse
amplitude. Simple expressions can be found in the lit-
erature for the limitation on the improvement factor
due to these equipment instability effects when a sin-
gle or a double delay-line canceler is used; but most
modern radars employ more sophisticated doppler fil-
ters and thus require more sophisticated analysis of the
effect of equipment instabilities.
Digital Quantization-The limit
on
the improve-
ment factor in a digital MTI due
to
the finite size of the
quantization interval of the A/D converter is approxi-
mately
I4
=
6
x
number of bits
(Eq. 39)
36-1
8
REFERENCE
DATA
FOR ENGINEERS
Fig.
11.
The improvement factor as a function of
u&
(ratio
of
the
standard deviation of the clutter and
the
pulse repetition
fre-
quency) for single and cascaded delay-line cancelers
(DLC)
as given
by
Eq.
37.
where
Iq
is in decibels. For example, an eight-bit
A/D
converter limits the improvement factor to 48 dB. In
practice one or two additional bits must be added to
account for receiver noise in the lower quantization
levels and the limitations introduced by a limited
dynamic range. In the previous example, a
10
bit A/D
converter would likely be used if the limitation on the
improvement factor had
to
be 48 dB.
PULSE COMPRESSION
Pulse compression allows a radar to utilize a long
pulse to achieve a large radiated energy, but with the
range resolution of a short pulse of wide bandwidth. It
achieves this by modulating the long pulse of width
T
to obtain a bandwidth
B
>>
1IT.
The received signal is
passed through a matched filter to produce a com-
pressed pulse of width
1/B.
The pulse compression
ratio, which is the duration of the long pulse divided
by the duration of the short (compressed) pulse, is
equal
to
BT.
Frequency and phase modulations have
both been used for pulse compression. Amplitude
modulation could also be employed,
in
principle, but it
is seldom found in practical pulse compression sys-
tems.
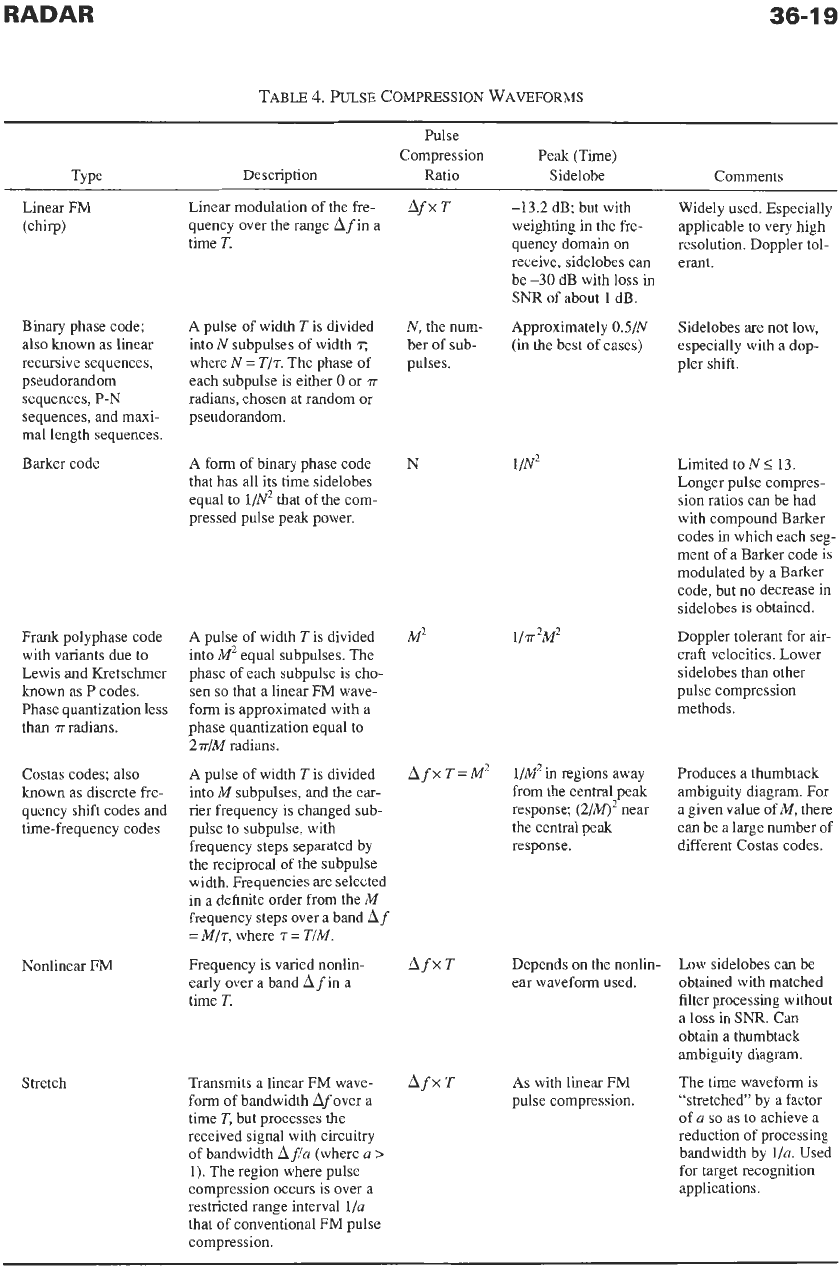
Table 4 gives the major types of pulse compression
waveforms that have been employed in radar.
Doppler tolerant waveforms,
such as the linear-FM
modulation and
the
polyphase code, can be processed
using a single matched filter even though the received
signal experiences a wide range of doppler frequency
shifts.
Complementary codes
consist of pairs of equal-
length codes which have the property that the time
sidelobes of one code are the negative of the other
so
that they can be canceled to result in no sidelobes, the-
oretically. (This is generally difficult to obtain in prac-
tice.) The
pulse burst
is a series of pulses transmitted
as a group before any echo signals are received (as
when a long minimum range can be tolerated). Further
information about pulse compression may be found in
Chapter
6
of Reference
1.
CLUTTER
Clutter echoes are those received from undesired
scatterers such as land, sea, rain, snow, chaff, clouds,
birds, insects, aurora, and meteors. Good radar prac-
tice requires that these clutter echoes be eliminated or
minimized
so
as to prevent degraded detection of
desired target echoes. It is especially important
to
limit
the amount of clutter echoes presented to automatic
detection and tracking
(ADT)
systems
so
that over-
loading of the tracking computer does not occur by
trying to establish tracks based on the echoes from
clutter rather than from targets.
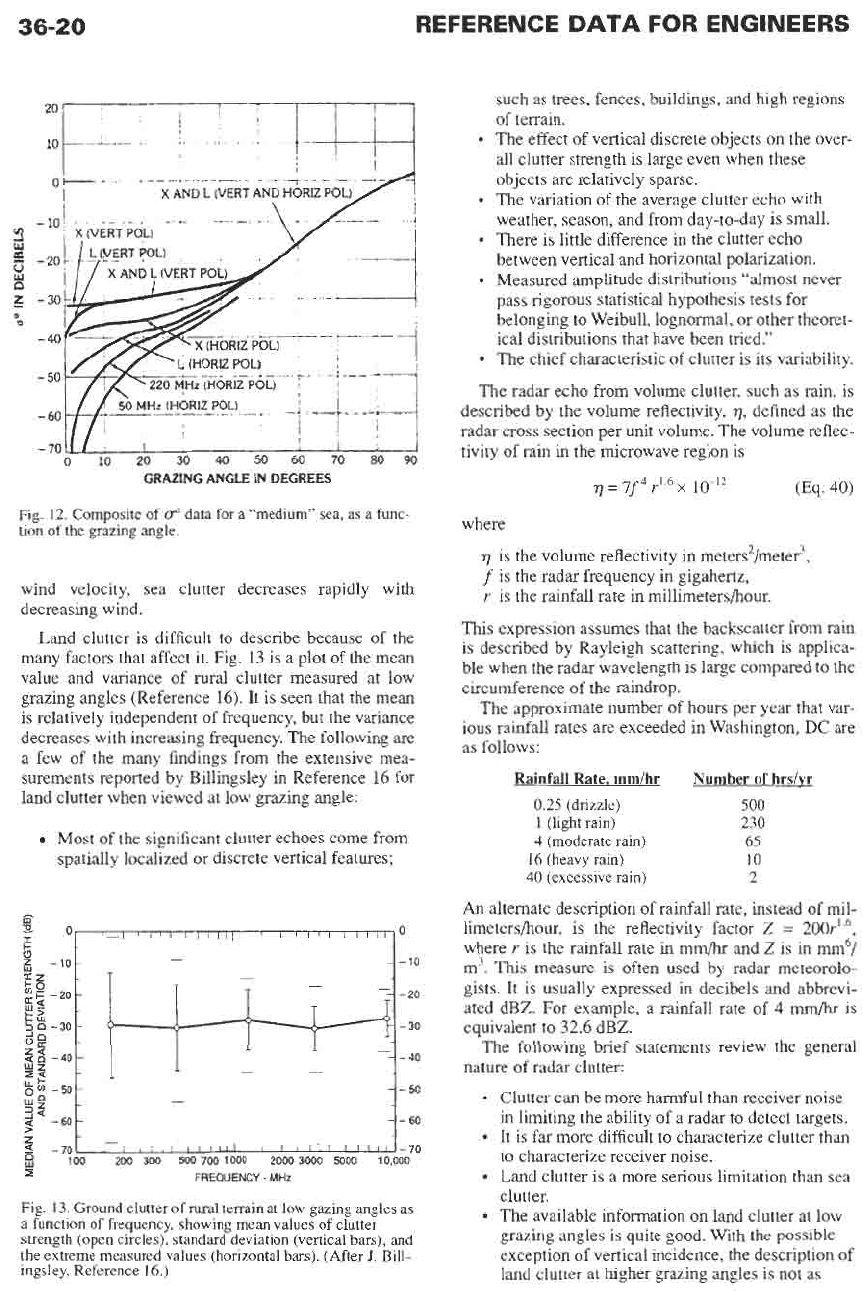
Surface clutter is described by the dimensionless
parameter
co,
defined as the clutter cross section per
unit area illuminated. Fig.
12
is a plot
of
the mean
value of
uo
for sea clutter as a function of the grazing
angle. It applies for a medium sea
(10-20
knot winds).
At the lower grazing angles, sea clutter increases
slowly with increasing winds above
15
to
20
knots (a
few tenths of
a
decibel per knot). Below about
5
knots
36-1
9
TABLE
4.
PULSE
COMPRESSION
WAVEFORMS
Pulse
Compression Peak (Time)
Description Ratio Sidelobe Comments
Binary phase code;
also known as linear
recursive sequences,
pseudorandom
sequences, P-N
sequences, and maxi-
mal length sequences.
Barker code
Frank polyphase code
with variants due to
Lewis and Kretschmer
known as
P
codes.
Phase quantization less
than
T
radians.
Costas codes; also
known as discrete fre-
quency shift codes and
time-frequency codes
Nonlinear FM
Stretch
Linear modulation of the fre-
quency over the range Afin a
time
T.
A
pulse of width Tis divided
into
N
subpulses of width
7;
where
N
=
T/r. The phase
of
each subpulse
is
either
0
or
7~
radians, chosen at random or
pseudorandom.
A
form of binary phase code
that has all its time sidelobes
equal to
1/N2
that of the com-
pressed pulse peak power.
A
pulse of width
T
is divided
into
M2
equal subpulses. The
phase of each subpulse is cho-
sen
so
that a linear FM wave-
form is approximated with a
phase quantization equal
to
2w/M
radians.
A
pulse of width Tis divided
into
M
subpulses, and the car-
rier frequency is changed sub-
pulse to subpulse. with
frequency steps separated by
the reciprocal
of
the subpulse
width. Frequencies
are
selected
in a definite order from the
M
frequency steps over
a
band
A
f
=
Mh,
where
r
=
TIM.
Frequency
is
varied nonlin-
early over a band Afin a
time
T.
Transmits a linear
FM
wave-
form of bandwidth
Af
over a
time T, but processes the
received signal with circuitry
of bandwidth
Afia
(where
a
>
1).
The region where pulse
compression occurs is over a
restricted range interval
l/u
that
of
conventional FM pulse
compression.
AfxT
-13.2
dB;
but with Widely used. Especially
applicable
to
very high
resolution. Doppler tol-
weighting in the fre-
quency domain
on
receive, sidelobes can erant.
be
-30
dB with loss in
SNR
of
about
1
dB.
N,
the num- Approximately
OS/N
Sidelobes are not low,
ber of sub- (in the best of cases)
especially with a dop-
pulses. pler shift.
N
M2
1/N2
A
f
x
T
=
M2
1/M2
in regions away
from the central peak
response;
(2/w2
near
the central peak
response.
AfxT
Depends
on
the nonlin-
ear waveform used.
Limited to
N
5
13.
Longer pulse compres-
sion ratios can be had
with compound Barker
codes in which each seg-
ment of a Barker code is
modulated by a Barker
code, but
no
decrease in
sidelobes is obtained.
Doppler tolerant for air-
craft velocities. Lower
sidelobes than other
pulse compression
methods.
AfxT
As
with linear FM
pulse compression.
Produces a thumbtack
ambiguity diagram. For
a given value of
M,
there
can be a large number of
different Costas codes.
Low sidelobes can be
obtained with matched
filter processing without
a loss in
SNR.
Can
obtain a thumbtack
ambiguity diagram.
The time waveform is
"stretched" by a factor
of
a
so
as to achieve a
reduction of processing
bandwidth by
llu.
Used
for target recognition
applications.
36-20
REFERENCE
DATA
FOR ENGINEERS
T-’
0
E
5
-10-
kin
5
-20
bg
c)
uz
E401
52
-40-
wz
8s-50-
5
-60-
z
24:
wo
35
oi-
.
I
I
I
5
,
X(VERTP0L)
(_I
11111,
,
,I,/
0
-
-10
-
-
-
-
-
-
-20
11
-
30
-
-
-
-40
-
-
-50
-
-
-
.
-
-
-60
-
70
-
,
I
I
I
0
10
20
30
40
50
60
70
80
90
GRAZING ANGLE IN DEGREES
Fig.
12.
Composite
of
d‘
data for
a
“medium”
sea,
as
a func-
tion
of
the grazing angle.
wind velocity, sea clutter decreases rapidly with
decreasing wind.
Land clutter is difficult to describe because of the
many factors that affect it. Fig. 13 is a plot of the mean
value and variance of rural clutter measured at low
grazing angles (Reference 16). It is seen that the mean
is relatively independent of frequency, but the variance
decreases with increasing frequency. The following are
a
few of the many findings from the extensive mea-
surements reported by Billingsley
in
Reference 16 for
land clutter when viewed at
low
grazing angle:
Most
of
the significant clutter echoes come from
spatially localized or discrete vertical features;
such
as
trees, fences, buildings, and high regions
of terrain.
The effect of vertical discrete objects on the over-
all clutter strength is large even when these
objects are relatively sparse.
The variation of the average clutter echo with
weather, season, and from day-to-day is small.
There is little difference
in
the clutter echo
between vertical and horizontal polarization.
Measured amplitude distributions “almost never
pass rigorous statistical hypothesis tests
for
belonging
to
Weibull, lognormal, or other theoret-
ical distributions that have been tried.”
The chief characteristic of clutter
is
its variability.
The radar echo from volume clutter, such
as
rain, is
described by the volume reflectivity,
77,
defined as the
radar cross section per unit volume. The volume reflec-
tivity of rain in the microwave region is
77
=
7f4
r1.6x
10-12
(Eq.
40)
where
77
is the volume reflectivity in meters2/meter3,
f
is
the radar frequency in gigahertz,
r
is
the rainfall rate in millimeters/hour.
This expression assumes that the backscatter from rain
is described by Rayleigh scattering, which is applica-
ble when the radar wavelength is large compared to the
circumference of the raindrop.
The approximate number of hours per year that var-
ious rainfall rates are exceeded in Washington, DC are
as
follows:
Rainfall Rate.
mm/hr
Number
of
hrdvr
0.25
(drizzle)
500
1
(light rain)
230
4
(moderate
rain)
65
16
(heavy
rain)
10
40
(excessive
rain)
2
An
alternate description of rainfall rate, instead of
mil-
limetershour, is the reflectivity factor
Z
=
200r’.6,
where
r
is the rainfall rate in mmh and
Z
is in
m6/
m3. This measure is often used by radar meteorolo-
gists.
It
is usually expressed in decibels and abbrevi-
ated dBZ. For example,
a
rainfall rate of
4
mm/hr
is
equivalent to 32.6 dBZ.
The following brief statements review the general
nature of radar clutter:
Clutter can be more harmful than receiver noise
in limiting the ability of
a
radar
to
detect targets.
It is far more difficult to characterize clutter than
to characterize receiver noise.
Land clutter is
a
more serious limitation than sea
clutter.
The available information on land clutter at low
grazing angles is quite good. With the possible
exception of vertical incidence, the description of
land clutter at higher grazing angles
is
not
as

RADAR
36-2
1
good. Theoretical models of clutter echo are poor
and remote sensing results over land might be
misleading.
The theory of radar sea clutter
at
HF
and
VHF
is
readily described by Bragg scatter. On the other
hand, Bragg scatter does not apply at the higher
microwave frequencies. “Sea spikes” are the
dominant clutter mechanism at these frequencies.
Rain clutter can seriously affect the performance
of radars at
L
band and higher. Unless doppler
processing
is
used,
S
band and higher frequency
radars are seriously degraded (clobbered) in rain.
Snow generally is not as serious
as
rain in reduc-
ing radar performance.
RADAR MEASUREMENT
ACCURACY
The rms error,
6M,
in making a measurement of
a
radar parameter
M
in the presence of Gaussian noise
and in the absence of any bias can be written conceptu-
ally in the form
6M
=
kM/(2E/No)’”
(Eq.
41)
where
E
is the received signal energy,
No
is the noise power per unit bandwidth,
k
is a constant of the order of unity.
(Note that
2E/No
is also the peak-signal-to-mean-noise
ratio at the output of
a
matched filter.) For a range
measurement (time delay),
k
depends on the shape
of
the signal spectrum and
M
can be taken as the rise time
of the pulse. For a doppler frequency measurement,
k
depends on the shape of the time waveform and
M
is
the spectral resolution (or the reciprocal of the obser-
vation time). For an angle measurement,
k
depends on
the shape
of
the antenna aperture illumination and
M
is
the beamwidth.
RMS Range Measurement Error
Rectangular pulses are seldom truly rectangular in
that they have
a
finite rise and a finite fall time.
A
quasi-rectangular pulse (Reference
1)
is
more realistic
than a perfectly rectangular pulse since it is a pulse
which has passed through a filter
so
that it has
a
rounded shape rather than have unrealistic rise and fall
times with infinite slopes. The theoretical rms range
error for such a pulse when the noise is Gaussian is
6R=
(c~/2)/[1.3(2E/N~)’/*]
(Eq.
42)
where
c
=
velocity of propagation
T
=
half-power time duration.
RMS Doppler Frequency
Measurement Error
Rectangular pulse of width
7.
Sf
=
1/1/[7.r(2ElNo)’/2]
(Eq.
43)
6f
=
1/[2.6r(2E/No)”2]
(Eq.
44)
Quasi-rectangular pulse of half-power width
7.
RMS Angle Measurement Error
Uniform aperture illumination:
60=
O.6280,l(2E/N0)’~*
(Eq.
45)
where
0,
=
half-power beamwidth.
Cosine aperture illumination:
TRACKING WITH RADAR
There are at least four different radar methods for
obtaining the track of
a
target, as described below.
Single-Target Tracker
(STT):
The single-target
tracker continually engages one target with
a
high data
rate. Ten target observations per second is
a
typical
data rate for military tracking radars. Tracking in range
and angle is performed with a closed-loop servo sys-
tem
so as
to keep the radar positioned on a moving tar-
get.
Monopulse
trackers
are
the most accurate tracker
and have
a
high degree of resistance
to
deliberate
countermeasures, which is why it has been the pre-
ferred tracking method for military air defense systems
based on the STT.
In
a
monopulse radar, the angle
measurement in one coordinate is determined by using
two beams slightly displaced (squinted) in angle.
Transmission occurs on the sum of the two squinted
beams and reception on both the sum and the differ-
ence of the two beams. The angle measurement is
obtained with the difference pattern. The sum pattern
provides detection and the measurement of range. The
sum pattern signal also acts as a reference signal
to
determine in which direction is the angle error. To pro-
vide angle measurements in two angle coordinates,
four squinted antenna beams are required.
A
monopulse tracker has three receiving channels:
a
range
channel and two
angle
channels.
The
conical scan
STT is much simpler than
a
monopulse tracker in that it needs only one receiving
channel to extract the angle measurement in two angle
coordinates.
A
single offset (squinted) antenna beam is
rotated typically at
a
rate of about
30
Hz.
The conical
scan tracker time-shares
a
single beam to sequentially
obtain the angle measurements in two coordinates;
whereas, a monopulse radar obtains its angle measure-
ments simultaneously. Conical scan radars are used
where accuracy and vulnerability to electronic counter-