Меньков А.В., Острейковский В.А. Теоретические основы автоматизированного управления
Подождите немного. Документ загружается.


250
решается с четом ее специфичесих свойств. Метод Данци а —
Вльфа — это один из наиболее старых и известных деомпози-
ционных методов, оторый был разработан Дж. Данци ом и
Ф. Вльфом (США) в 1960 . В этом методе центр спсает пред-
приятиям информацию в виде цен, а полчает от них информа-
цию в виде предпола аемых объемов затрат и выпсов. Деом-
позиционный метод Данци а — Вльфа относится задачам ли-
нейно о про раммирования, в оторых исомые переменные
рппирются в блои, связанные в единю задач либо дополни-
тельными общими о раничениями, либо дополнительными об-
щими переменными, входящими во все блои одновременно.
В методе Данци а — Вльфа рассматривается задача линейно-
о про раммирования, о раничения оторой разделены на два
блоа, т. е. требется найти масимм фнции
⇒ max; (7.1)
при о раничениях
= B
0
;(7.2)
= B
1
;(7.3)
x
i
l 0, (7.4)
де C = (c
1
, …, c
n
) — ветор строи; B = (B
0
, B
1
)
T
= (b
1
, …, b
m
,
b
m +1
, …, b
m + k
)
T
— (m + k) — мерный ветор о раничения задачи;
А
i
= ( , )
T
= (a
1i
, …, a
mi
, a
m +1, i
, …, a
m + k, i
)
T
— (m + k) — мер-
ный i-тый ветор словий i = ; T — зна транспонирования,
X =(x
1
, …, x
n
) — ветор переменных.
Для обоснования иерархичесо о построения СУ наиболь-
ший интерес представляют итеративные методы решения задач
блочно о про раммирования, оторые в отличие от монотонных
методов (например, симплес-метода) не позволяют полчить
решение за онечное число ша ов и процесс приближения ре-
шению не является монотонным. Однао они обеспечивают при-
ближение оптимальном решению при величении числа ите-
раций. Задачи итерационно о типа обычно рассматриваются а
двхровневые.
c
i
x
i
i 1=
n
∑
A
i
0
x
i
i 1=
n
∑
A
i
1
x
i
i 1=
n
∑
A
i
0
A
i
1
1 n,
251
В ал оритме Корнай — Липтаа центр спсает план в нат-
ральных поазателях, а информация в форме оцено в центр пос-
тпает от предприятий. Обозначим через u
i
= ветор размер-
ности ν, оординаты оторо о представляют собой объемы соот-
ветствющих общих ресрсов, выделенных i-том бло. Веторы
выбираются та, чтобы = B
2
. То да задача (7.1)—(7.4) рас-
падается на n отдельных задач вида
c
i
x
i
⇒ max; x
i
= u
i
; x
i
= B
1
; x
i
l 0. (7.5)
Двойственная ней задача бдет иметь вид
(u
i
y
i
+ B
1
z
i
) ⇒ min; (7.6)
y
i
= z
i
l c.(7.7)
Псть Y
i
— множество допстимых планов задачи (7.6)—(7.7),
X
i
(u
i
) — множество допстимых планов задачи (7.5) при фиси-
рованном веторе u
i
. Бдем считать, что Y
i
≠ ¾ для всех i = .
Введем (ν + n) — мерный ветор u = (u
1
, ..., u
n
, u
n + 1
, ..., u
n + ν
)
T
и множество
U = {u / = B
2
, X
i
(u
i
) ≠ 0, > i = }.
Назовем центральным планом задачи (7.1)—(7.4) и U — мно-
жеством допстимых центральных планов. Через ϕ
i
(u
i
) обозначим
оптимальное значение целевой фнции в задаче (7.6), (7.7) при
фисированном веторе u
i
и положим
ϕ(u) = .
То да задача (7.1)—(7.4) эвивалентна задаче
ϕ(u) ⇒ , (7.8)
оторая решается сведением ее матричной и ре и решением
последней итеративным методом Брана — Робинсона или др-
ими способами.
Необходимо подчернть, что блочные ал оритмы математи-
чесо о про раммирования — очень рбые модели процессов пла-
нирования и правления. Более совершенные модели должны чи-
1 n,
u
i
i 1=
n
∑
A
i
0
A
i
1
A
i
0
A
i
1
1 n,
u
i
∑
1 n,
ϕ
i
u
i
()
i 1=
n
∑
max
u ° U
252
тывать ативность элементов системы, т. е. наличие них собствен-
ных целей, харатеристии средств переработи и достоверность
информации, запаздывание при ее обмене и др ие фаторы.
При использовании метода деомпозиции для решения за-
дач планирования и оперативно о правления имеются сщест-
венные различия. В планировании резльтаты решения задачи
использются лишь после е о оончания. Задача при этом мо-
жет решаться на одном или несольих ровнях. В оперативном
правлении промежточные резльтаты в процессе решения
задачи использются для правления. При этом сщественной
становится динамиа процесса и чет разно о масштаба вре-
мени на различных ровнях системы.
Ареация. А ре ация является од-
ним из методов синтеза сложных
систем, т. е. процесса построения
системы, обладающей заданными
свойствами, птем объединения от-
дельных подсистем с известными ха-
ратеристиами. Таим образом, а -
ре ация может рассматриваться а
противоположность деомпозиции.
Ряд сщественных резльтатов ис-
пользования принципа а ре ации по-
лчен Р. Клиовсим.
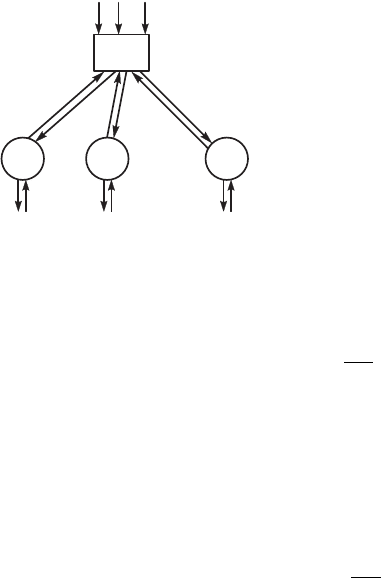
Рассмотрим ИСУ, поазанню на
рис. 7.16. Управляющее стройство
(УУ) полчает от системы высше о ровня неоторое оличество
ресрсов А, В, ..., P и распределяет их оптимальным образом меж-
д объетами правления M
i
, i = . Информация о выходных
эффетах, или продтах аждо о объета правления (ОУ), пос-
тпает на УУ и в а ре изированном виде Y
i
и определяет валовю
продцию системы. Псть известны харатеристии оптималь-
но о правления ОУ в виде
... = . (7.9)
То да задача состоит в определении таих значений , , ... ,
, переменных A
i
, B
i
, ... , P
i
, i = , оторые масимизирют
сммарный выход
Y = = ⇒ max (7.10)
. . .
...
m
1
m
2
R
n
R
1
A
ÓÓ
R
2
Y
n
Y
1
Y
2
m
n
BP
7.16. Интерпретация
принципа ареации
1 n,
A
i
α
B
i
β
P
i
p
Q
i
q
A
i
0
B
i
0
P
i
0
1 n,
Y
i
i 1=
n
∑
Q
i
q
A
i
α−
B
i
β−
... P
p−
[]
1/q
i 1=
n
∑
253
при соблюдении словий
= A; = B; ... ; A
i
l 0; B
i
l 0; .... .
Можно поазать, что оптимальные значения , , ...,
определяются из линейных равнений:
= = ... = = ,
де Q = . Подставляя значения , , ..., в (7.10), по-
лчаем
A
α
B
β
... P
p
= Q
q
, q = α + β + ... + ρ.
Ка видно, харатеристии оптимально о правления для а -
ре ированной системы имеют таой же аналитичесий вид, а и
харатеристии подсистем (7.9). Та а аждая подсистема пол-
ностью определена значением оэффициента Q
i
, то можно са-
зать, что процесс а ре ации сопровождается n-ратным сжатием
информации, содержащейся в харатеристиах оптимально о п-
равления а ре ированных подсистем.
Конечно, сществет мно о харатеристи оптимально о п-
равления, оторые не описываются равнениями типа (7.9). То -
да вопрос а ре ации и оптимизации превращается в трдню за-
дач нелинейно о про раммирования.
В рассмотренном слчае а ре ации (7.9), (7.10) предпола а-
лось, что выходные эффеты Y
i
аддитивным образом содейств-
ют достижению общей цели Y, т. е.
Y = , ε > 0.
Однао во мно их производственных системах имеется ряд
ритериев ачества, оторые лишь в совопности определяют
ачество процесса фнционирования всей системы.
Задачи, решаемые системами, обычно имеют настольо боль-
шю размерность, что изчение их в исходных переменных не
позволяет оптимизировать процесс и полчить представления о
влиянии отдельных ОУ системы на общю эффетивность. Вы-
A
i
i 1=
n
∑
B
i
i 1=
n
∑
A
i
0
B
i
0
P
i
0
A
i
0
A
----- -
B
i
0
B
----- -
P
i
0
P
----- -
Q
i
0
Q
------
Q
i
i 1=
n
∑
A
i
0
B
i
0
P
i
0
ε
i
Y
i
i 1=
n
∑
252
тывать ативность элементов системы, т. е. наличие них собствен-
ных целей, харатеристии средств переработи и достоверность
информации, запаздывание при ее обмене и др ие фаторы.
При использовании метода деомпозиции для решения за-
дач планирования и оперативно о правления имеются сщест-
венные различия. В планировании резльтаты решения задачи
использются лишь после е о оончания. Задача при этом мо-
жет решаться на одном или несольих ровнях. В оперативном
правлении промежточные резльтаты в процессе решения
задачи использются для правления. При этом сщественной
становится динамиа процесса и чет разно о масштаба вре-
мени на различных ровнях системы.
Ареация. А ре ация является од-
ним из методов синтеза сложных
систем, т. е. процесса построения
системы, обладающей заданными
свойствами, птем объединения от-
дельных подсистем с известными ха-
ратеристиами. Таим образом, а -
ре ация может рассматриваться а
противоположность деомпозиции.
Ряд сщественных резльтатов ис-
пользования принципа а ре ации по-
лчен Р. Клиовсим.
Рассмотрим ИСУ, поазанню на
рис. 7.16. Управляющее стройство
(УУ) полчает от системы высше о ровня неоторое оличество
ресрсов А, В, ..., P и распределяет их оптимальным образом меж-
д объетами правления M
i
, i = . Информация о выходных
эффетах, или продтах аждо о объета правления (ОУ), пос-
тпает на УУ и в а ре изированном виде Y
i
и определяет валовю
продцию системы. Псть известны харатеристии оптималь-
но о правления ОУ в виде
... = . (7.9)
То да задача состоит в определении таих значений , , ... ,
, переменных A
i
, B
i
, ... , P
i
, i = , оторые масимизирют
сммарный выход
Y = = ⇒ max (7.10)
. . .
...
m
1
m
2
R
n
R
1
A
ÓÓ
R
2
Y
n
Y
1
Y
2
m
n
BP
7.16. Интерпретация
принципа ареации
1 n,
A
i
α
B
i
β
P
i
p
Q
i
q
A
i
0
B
i
0
P
i
0
1 n,
Y
i
i 1=
n
∑
Q
i
q
A
i
α−
B
i
β−
... P
p−
[]
1/q
i 1=
n
∑
253
при соблюдении словий
= A; = B; ... ; A
i
l 0; B
i
l 0; .... .
Можно поазать, что оптимальные значения , , ...,
определяются из линейных равнений:
= = ... = = ,
де Q = . Подставляя значения , , ..., в (7.10), по-
лчаем
A
α
B
β
... P
p
= Q
q
, q = α + β + ... + ρ.
Ка видно, харатеристии оптимально о правления для а -
ре ированной системы имеют таой же аналитичесий вид, а и
харатеристии подсистем (7.9). Та а аждая подсистема пол-
ностью определена значением оэффициента Q
i
, то можно са-
зать, что процесс а ре ации сопровождается n-ратным сжатием
информации, содержащейся в харатеристиах оптимально о п-
равления а ре ированных подсистем.
Конечно, сществет мно о харатеристи оптимально о п-
равления, оторые не описываются равнениями типа (7.9). То -
да вопрос а ре ации и оптимизации превращается в трдню за-
дач нелинейно о про раммирования.
В рассмотренном слчае а ре ации (7.9), (7.10) предпола а-
лось, что выходные эффеты Y
i
аддитивным образом содейств-
ют достижению общей цели Y, т. е.
Y = , ε > 0.
Однао во мно их производственных системах имеется ряд
ритериев ачества, оторые лишь в совопности определяют
ачество процесса фнционирования всей системы.
Задачи, решаемые системами, обычно имеют настольо боль-
шю размерность, что изчение их в исходных переменных не
позволяет оптимизировать процесс и полчить представления о
влиянии отдельных ОУ системы на общю эффетивность. Вы-
A
i
i 1=
n
∑
B
i
i 1=
n
∑
A
i
0
B
i
0
P
i
0
A
i
0
A
----- -
B
i
0
B
----- -
P
i
0
P
----- -
Q
i
0
Q
------
Q
i
i 1=
n
∑
A
i
0
B
i
0
P
i
0
ε
i
Y
i
i 1=
n
∑
254
ход из это о положения состоит в том, что нжно либо выделять
сщественные переменные, по оторым и производится оптими-
зация, либо а ре ировать переменные. При а ре ировании пере-
менных полчается модель сщественно меньшей размерности.
А ре ирование переменных, а таже переход от а ре ированных
величин исходным мо т быть выполнены различными спосо-
бами.
Отметим, что не при любом выборе а ре ированных перемен-
ных от исходной модели можно перейти адеватной а ре иро-
ванной модели, т. е. таой модели, состояние выходов оторой
совпадает с а ре атами состояния выходов исходной модели, ес-
ли состояние входов а ре ированной модели совпадает с а ре а-
тами состояния входов исходной модели. В тех слчаях, о да
построенная а ре ированная модель адеватна исходной, ово-
рят, что а ре ирование совместно.
Предположим, что для неоторо о объета построена модель
в виде системы равнений
y
i
= f
i
(x
i
), i = ,
связывающих вход модели х с её выходами . То да а ре ирование
этой модели сводится введению неоторой замены переменных
ε
k
= ψ
k
(x
1
, ... , x
n
), k = ; m < n;
r
k
= ϕ
k
(y
1
, ... , y
n
), (7.11)
задающей связи межд переменными x и y исходной модели с а -
ре атами ε, r и k введению системы равнений
r
k
= μ
k
(ε
1
, ... , ε
m
), k = , (7.12)
связывающих входы ε а ре ированной модели с ее выходами r.
Условие совместности при таом а ре ировании имеет вид
ϕ
k
(f
1
(x), ... , f
n
(x)) = μ
k
(ψ
1
(x), ... , ψ
m
(x)), k = , (7.13)
для любых X = (x
1
, ... , x
n
).
В ачестве примера рассмотрим применение принципа а ре-
ирования в линейных эономичесих моделях, в частности в
моделях межотраслево о баланса. Подобные задачи состоят в оп-
ределении объемов x
1
, x
2
, ... , x
n
полных выпсов аждо о из n
видов продции, необходимых для обеспечения заданных объ-
1 n,
1 m,
1 m,
1 m,
255
емов y
i
, i = онечных выпсов и провери допстимости по-
лченно о ветора X = (x
1
, ... , x
n
) по неоторым сводным поаза-
телям, например, по стоимости или производственным мощнос-
тям. Одной из наиболее известных моделей межотраслево о
баланса, на оторых решаются подобные задачи, является модель
«затраты — выпс»
X = AX + Y,(7.14)
де X = (x
1
, ..., x
n
) — ветор полно о выпса продции; Y = (y
1
, ... ,
y
n
) — ветор онечно о выпса продции; A = || a
ij
|| — матрица
оэффициентов прямых материальных затрат.
Современном ровню разделения трда в промышленности
соответствет номенлатра из десятов тысяч различных видов
продции, что и определяет размерность n исходной модели
(7.14). А ре ирование этой модели означает меньшение размер-
ности объединением продтов в рпненню (а ре ированню)
номенлатр, состоящю из m(m < n) а ре ированных поазате-
лей. То да в соответствии с (7.11) и (7.12) можно ввести перемен-
ные E = {ε
1
, ... , ε
m
} и R = (r
1
, ... , r
m
), таие, что
E = CX, R = DY,(7.15)
де C = || c
ij
||, D = || d
ij
|| —матрицы одинаовых размеров m×n, ран-
а m, и матриц H, задающю связь межд а ре атами Е и R:
E = EH + R.(7.16)
Систем равнений (7.15) и (7.16) называют линейной систе-
мой биматрично о а ре ирования модели «затраты — выпс».
Условие совместности (7.13) в данном слчае имеет вид
(Ф
m
– H)C = D(Ф
n
– A), (7.17)
де Ф
n
— единичная матрица поряда k, k = m, n.
А ре ированная модель (7.16) с точностью до обозначений в
размерности совпадает с исходной моделью «затраты — выпс»
(7.14). Это позволяет применить описанный аппарат а ре ирова-
ния и модели (7.16). В резльтате ряда последовательных ша ов
а ре ирования можно построить мно остпенчатю систем
а ре ирования модели «затраты — выпс», соответствющю
иерархичесой стртре правления промышленным произ-
водством.
В сложных ИСУ модели нижних ровней и лобальная модель
отличаются а размерностью, та и составом переменных. Поэ-
1 n,

254
ход из это о положения состоит в том, что нжно либо выделять
сщественные переменные, по оторым и производится оптими-
зация, либо а ре ировать переменные. При а ре ировании пере-
менных полчается модель сщественно меньшей размерности.
А ре ирование переменных, а таже переход от а ре ированных
величин исходным мо т быть выполнены различными спосо-
бами.
Отметим, что не при любом выборе а ре ированных перемен-
ных от исходной модели можно перейти адеватной а ре иро-
ванной модели, т. е. таой модели, состояние выходов оторой
совпадает с а ре атами состояния выходов исходной модели, ес-
ли состояние входов а ре ированной модели совпадает с а ре а-
тами состояния входов исходной модели. В тех слчаях, о да
построенная а ре ированная модель адеватна исходной, ово-
рят, что а ре ирование совместно.
Предположим, что для неоторо о объета построена модель
в виде системы равнений
y
i
= f
i
(x
i
), i = ,
связывающих вход модели х с её выходами . То да а ре ирование
этой модели сводится введению неоторой замены переменных
ε
k
= ψ
k
(x
1
, ... , x
n
), k = ; m < n;
r
k
= ϕ
k
(y
1
, ... , y
n
), (7.11)
задающей связи межд переменными x и y исходной модели с а -
ре атами ε, r и k введению системы равнений
r
k
= μ
k
(ε
1
, ... , ε
m
), k = , (7.12)
связывающих входы ε а ре ированной модели с ее выходами r.
Условие совместности при таом а ре ировании имеет вид
ϕ
k
(f
1
(x), ... , f
n
(x)) = μ
k
(ψ
1
(x), ... , ψ
m
(x)), k = , (7.13)
для любых X = (x
1
, ... , x
n
).
В ачестве примера рассмотрим применение принципа а ре-
ирования в линейных эономичесих моделях, в частности в
моделях межотраслево о баланса. Подобные задачи состоят в оп-
ределении объемов x
1
, x
2
, ... , x
n
полных выпсов аждо о из n
видов продции, необходимых для обеспечения заданных объ-
1 n,
1 m,
1 m,
1 m,
255
емов y
i
, i = онечных выпсов и провери допстимости по-
лченно о ветора X = (x
1
, ... , x
n
) по неоторым сводным поаза-
телям, например, по стоимости или производственным мощнос-
тям. Одной из наиболее известных моделей межотраслево о
баланса, на оторых решаются подобные задачи, является модель
«затраты — выпс»
X = AX + Y,(7.14)
де X = (x
1
, ..., x
n
) — ветор полно о выпса продции; Y = (y
1
, ... ,
y
n
) — ветор онечно о выпса продции; A = || a
ij
|| — матрица
оэффициентов прямых материальных затрат.
Современном ровню разделения трда в промышленности
соответствет номенлатра из десятов тысяч различных видов
продции, что и определяет размерность n исходной модели
(7.14). А ре ирование этой модели означает меньшение размер-
ности объединением продтов в рпненню (а ре ированню)
номенлатр, состоящю из m(m < n) а ре ированных поазате-
лей. То да в соответствии с (7.11) и (7.12) можно ввести перемен-
ные E = {ε
1
, ... , ε
m
} и R = (r
1
, ... , r
m
), таие, что
E = CX, R = DY,(7.15)
де C = || c
ij
||, D = || d
ij
|| —матрицы одинаовых размеров m×n, ран-
а m, и матриц H, задающю связь межд а ре атами Е и R:
E = EH + R.(7.16)
Систем равнений (7.15) и (7.16) называют линейной систе-
мой биматрично о а ре ирования модели «затраты — выпс».
Условие совместности (7.13) в данном слчае имеет вид
(Ф
m
– H)C = D(Ф
n
– A), (7.17)
де Ф
n
— единичная матрица поряда k, k = m, n.
А ре ированная модель (7.16) с точностью до обозначений в
размерности совпадает с исходной моделью «затраты — выпс»
(7.14). Это позволяет применить описанный аппарат а ре ирова-
ния и модели (7.16). В резльтате ряда последовательных ша ов
а ре ирования можно построить мно остпенчатю систем
а ре ирования модели «затраты — выпс», соответствющю
иерархичесой стртре правления промышленным произ-
водством.
В сложных ИСУ модели нижних ровней и лобальная модель
отличаются а размерностью, та и составом переменных. Поэ-
1 n,
256
том при онстрировании модели ИСУ признана необходимой
различная степень рпнения поазателей разных ровней. Для
решения таих задач разработаны специальные методы итератив-
но о а ре ирования, позволяющие вязывать решения, полчаю-
щиеся на верхних ровнях, с решениями, формирющимися на
нижних ровнях.
Основная идея метода итеративно о а ре ирования залюча-
ется в следющем. Псть дана задача математичесо о про рам-
мирования
f(X) ⇒ max; g(X) m 0; x l 0. (7.18)
Здесь X = — ветор элементов x
i
, размерностью n;
g(X)= .
Разобьем множество индесов N = {1, ..., n} на l пересеаю-
щихся подмножеств J
k
, k = и подставим определенным обра-
зом в соответствие рппе переменных x
i
, i ° J
k
одн а ре ирован-
ню переменню x
k
. То да задача (7.18) в новых переменных пе-
репишется в виде
(X ) ⇒ max; (X ) m 0; x l 0, (7.19)
де
X = ; (X ) = , l < m.
Правила перехода от задачи (7.18) задаче (7.19) составляют
первю часть ал оритма, а именно а ре ирование. Полченный в
резльтате решения задачи (7.19) а ре ированный ветор X опре-
деленным образом а ре ирет до исходной размерности n. Это
вторая часть процесса — деза ре ирование. Детализация решения
позволяет перейти новой задаче и т. д., поа с заданной степе-
нью точности не бдет построено детализированное решение,
довлетворяющее словиям (7.18).
Ал оритмы итеративно о а ре ирования мо т быть реализо-
ваны в разных вариантах, одни из оторых онечноша овые, а
др ие — бесонечноша овые итеративные процессы, причем
последние нестационарны.
В залючение заметим, что методы а ре ации разработаны в
настоящее время недостаточно. Особенно это относится мето-
дам итеративно о а ре ирования — весьма важном подласс
математичесо о про раммирования.
x
i
{}
1
n
g
j
X(){}
1
m
1 l,
f
g
x
k
{}
1
l
g gX(){}
1
m
257
7.5. Принципы правления сложными системами
Управление в сложных системах принципиально отличается
от традиционно о представления об правлении, в частности от
то о, что принято называть «оптимальным правлением» (точ-
нее — «про раммным правлением»), т. е. переводом системы в
желаемое состояние по неотором оптимальном пти. Это оче-
видно: сложные системы слабопредсаземы, определить а же-
лаемое, та и пратичеси достижимое состояние невозможно,
тем более невозможно выбрать и навязать системе «оптимальный»
(в детерминистичесом или статистичесом смысле) пть перехо-
да, посоль стртра и фнции системы не взаимоопредели-
мы. По содержанию и механизм действия правление сложными
системами, в том числе самоправление, наиболее близо фи-
зиоло ичесим процессам возбждения и торможения, иначе о-
воря, внешне о и внтренне о стимлирования. Прямые и обрат-
ные связи, все виды и формы воздействия (если они не приводят
разршению системы) — не более чем стимлы, возбждающие
или тормозящие внтрисистемные процессы, ход и последствия
оторых в основном определяются самой системой.
Проблема правления сложными системами состоит в иссле-
довании влияния возбждающих и тормозящих стимлов на по-
ведение системы и онечный резльтат и в использовании стим-
лирования для достижения требемой эффетивности системы.
Возбждение может перейти в торможение и наоборот: при изме-
нении ровня стимла и состояния системы, поэтом априорная
оцена харатера воздействия затрднительна. Управление долж-
но дости аться ценой относительно мало о энер оресрса. Ти-
пичным в этом смысле является информационное правление,
при отором энер оресрс правления незначителен по сравне-
нию с энер оресрсом объетов правления. Сложная система
обладает не тольо большим энер оресрсом, но и большой ди-
намичесой инерционностью.
Сформлирем общю задач правления сложной системой
в следющем виде:
= Фt, Y(t), Y(t –
τ), dF
1
[(s, t),t], ...
..., dF
k
[(s, t)t), x(t, t
x
), u(t, τ
u
)] , (7.20)
dY t()
dt
-------------
⎩
⎨
⎧
Ys δ
1
−()
∞−
t τ−
∫
Ys δ
k
−()
∞−
t τ−
∫
⎭
⎬
⎫
256
том при онстрировании модели ИСУ признана необходимой
различная степень рпнения поазателей разных ровней. Для
решения таих задач разработаны специальные методы итератив-
но о а ре ирования, позволяющие вязывать решения, полчаю-
щиеся на верхних ровнях, с решениями, формирющимися на
нижних ровнях.
Основная идея метода итеративно о а ре ирования залюча-
ется в следющем. Псть дана задача математичесо о про рам-
мирования
f(X) ⇒ max; g(X) m 0; x l 0. (7.18)
Здесь X = — ветор элементов x
i
, размерностью n;
g(X)= .
Разобьем множество индесов N = {1, ..., n} на l пересеаю-
щихся подмножеств J
k
, k = и подставим определенным обра-
зом в соответствие рппе переменных x
i
, i ° J
k
одн а ре ирован-
ню переменню x
k
. То да задача (7.18) в новых переменных пе-
репишется в виде
(X ) ⇒ max; (X ) m 0; x l 0, (7.19)
де
X = ; (X ) = , l < m.
Правила перехода от задачи (7.18) задаче (7.19) составляют
первю часть ал оритма, а именно а ре ирование. Полченный в
резльтате решения задачи (7.19) а ре ированный ветор X опре-
деленным образом а ре ирет до исходной размерности n. Это
вторая часть процесса — деза ре ирование. Детализация решения
позволяет перейти новой задаче и т. д., поа с заданной степе-
нью точности не бдет построено детализированное решение,
довлетворяющее словиям (7.18).
Ал оритмы итеративно о а ре ирования мо т быть реализо-
ваны в разных вариантах, одни из оторых онечноша овые, а
др ие — бесонечноша овые итеративные процессы, причем
последние нестационарны.
В залючение заметим, что методы а ре ации разработаны в
настоящее время недостаточно. Особенно это относится мето-
дам итеративно о а ре ирования — весьма важном подласс
математичесо о про раммирования.
x
i
{}
1
n
g
j
X(){}
1
m
1 l,
f
g
x
k
{}
1
l
g gX(){}
1
m
257
7.5. Принципы правления сложными системами
Управление в сложных системах принципиально отличается
от традиционно о представления об правлении, в частности от
то о, что принято называть «оптимальным правлением» (точ-
нее — «про раммным правлением»), т. е. переводом системы в
желаемое состояние по неотором оптимальном пти. Это оче-
видно: сложные системы слабопредсаземы, определить а же-
лаемое, та и пратичеси достижимое состояние невозможно,
тем более невозможно выбрать и навязать системе «оптимальный»
(в детерминистичесом или статистичесом смысле) пть перехо-
да, посоль стртра и фнции системы не взаимоопредели-
мы. По содержанию и механизм действия правление сложными
системами, в том числе самоправление, наиболее близо фи-
зиоло ичесим процессам возбждения и торможения, иначе о-
воря, внешне о и внтренне о стимлирования. Прямые и обрат-
ные связи, все виды и формы воздействия (если они не приводят
разршению системы) — не более чем стимлы, возбждающие
или тормозящие внтрисистемные процессы, ход и последствия
оторых в основном определяются самой системой.
Проблема правления сложными системами состоит в иссле-
довании влияния возбждающих и тормозящих стимлов на по-
ведение системы и онечный резльтат и в использовании стим-
лирования для достижения требемой эффетивности системы.
Возбждение может перейти в торможение и наоборот: при изме-
нении ровня стимла и состояния системы, поэтом априорная
оцена харатера воздействия затрднительна. Управление долж-
но дости аться ценой относительно мало о энер оресрса. Ти-
пичным в этом смысле является информационное правление,
при отором энер оресрс правления незначителен по сравне-
нию с энер оресрсом объетов правления. Сложная система
обладает не тольо большим энер оресрсом, но и большой ди-
намичесой инерционностью.
Сформлирем общю задач правления сложной системой
в следющем виде:
= Фt, Y(t), Y(t –
τ), dF
1
[(s, t),t], ...
..., dF
k
[(s, t)t), x(t, t
x
), u(t, τ
u
)] , (7.20)
dY t()
dt
-------------
⎩
⎨
⎧
Ys δ
1
−()
∞−
t τ−
∫
Ys δ
k
−()
∞−
t τ−
∫
⎭
⎬
⎫
258
де Y — выход системы; x(t, τ
x
) ô X — воздействие среды; F
i
,
i = — известные фнции; u(t, τ
u
) ô U — область возможных
и допстимых правлений; τ
x
, τ
u
, δ
i
— запаздывания. При чете
предыстории t
0
– τ
max
m t m t
0
.
Требется найти правление и (t, ), обеспечивающее вы-
сою эффетивность системы
Э = Э [Y(t), T, C, (t, ), x(t, τ
x
)] l Э *, (7.21)
де С — стоимость системы.
Система считается правляемой, если:
(7.22)
де P(u) — мощность, потребляемая для реализации правления
и при задержах τ
u
, E
s
— энер оресрс системы; P
*
, E
*
— до-
пстимые значения мощности и энер ии правления на интерва-
ле [0, Т ].
Значимость фнций, входящих в Ф выражения (7.20), не-
одинаова для систем различно о ласса: Y (t) представляет со-
бой состояние выходов системы начал правления; Y(t – τ)
при t
0
– τ
max
m t m t
0
— поведение системы на интервале, пред-
шествющем правлению (предыстория системы);
(s – δ
i
)dF
i
((s, t),t), i = , {δ
i
} = δ,
множество, определяющее типовые свойства системы, ее спо-
собность правлению и внтренние тенденции, неоторю от-
носительно стабильню (посоль инте рирование ведется от
–×) линию поведения и правляемости, ее внтреннюю моти-
вацию.
Управление и воздействие среды мо т быть независимы, но
мо т быть и зависимы, если правляющая система распола ает
априорной информацией относительно X или оценивает х на ин-
тервале [0, T ], а среда может иметь информацию относительно U
или оценивать u на интервале [0, T ].
Рассмотрим частные слчаи.
1 k,
u
ˆ
τˆ
u
u
ˆ
τˆ
u
0
T
∫
Э[Y(t), T, C] l Э
*
при u(X) ô U,
P
u
(u(t, τ
u
(t))) l P
*
,
P
u
(t)dt = E
*
ô E
s
,
⎩
⎨
⎧
Y
∞−
t τ−
∫
⎭
⎬
⎫
1 k,
259
1. Фнция Ф таова, что влияние τ на (s – δ
i
)dF
i
((s, t),t),
i = , пренебрежимо мало; в этом слчае
= Ф[t, Y(t), x(t, τ
x
), u(t, τ
u
)]. (7.23)
Если, роме то о, Ф — линейная фнция и τ
u
= 0, x = 0, то
= AY + u + f (t). (7.24)
Это задача про раммно о правления, харатерная для техни-
чесих систем, оторая решается известными методами. Если
x ≠ 0, то
= AY + x + u + f (t )(7.25)
и это есть правление в словиях содействия или противодейс-
твия. В слчае f (t) = 0 и
= AY + u + ξ, (7.26)
де ξ — слчайная фнция, то правление стохастичесое.
2. Фнция Ф слабо зависит от (s)dF
i
((s, t),t), i = ,
в этом слчае
= Ф[t, Y(t), Y(t – τ), x(t – τ
x
), u(t – τ
u
)], (7.27)
правление не опирается на мотивацию, но сщественно зависит
от ситации на интервале [t – τ, t]. Это ситационное правление.
При линейной Ф и f (t) = 0
= A
1
Y(t) + A
2
Y(t – τ) + x(t – τ
x
) + u(t – τ
u
), (7.28)
де A
1
и A
2
— матрицы оэффициентов. Решение (7.28) (если оно
сществет) дости ается типовыми методами. Задачи ситацион-
но о правления (7.27) и (7.28) харатерны для производствен-
ных систем.
⎩
⎨
⎧
Y
∞−
t τ−
∫
⎭
⎬
⎫
1 k,
dY
dt
------
dY
dt
------
dY
dt
------
dY
dt
------
⎩
⎨
⎧
Y
∞−
t
∫
⎭
⎬
⎫
1 k,
dY
dt
------
dY
dt
------

258
де Y — выход системы; x(t, τ
x
) ô X — воздействие среды; F
i
,
i = — известные фнции; u(t, τ
u
) ô U — область возможных
и допстимых правлений; τ
x
, τ
u
, δ
i
— запаздывания. При чете
предыстории t
0
– τ
max
m t m t
0
.
Требется найти правление и (t, ), обеспечивающее вы-
сою эффетивность системы
Э = Э [Y(t), T, C, (t, ), x(t, τ
x
)] l Э *, (7.21)
де С — стоимость системы.
Система считается правляемой, если:
(7.22)
де P(u) — мощность, потребляемая для реализации правления
и при задержах τ
u
, E
s
— энер оресрс системы; P
*
, E
*
— до-
пстимые значения мощности и энер ии правления на интерва-
ле [0, Т ].
Значимость фнций, входящих в Ф выражения (7.20), не-
одинаова для систем различно о ласса: Y (t) представляет со-
бой состояние выходов системы начал правления; Y(t – τ)
при t
0
– τ
max
m t m t
0
— поведение системы на интервале, пред-
шествющем правлению (предыстория системы);
(s – δ
i
)dF
i
((s, t),t), i = , {δ
i
} = δ,
множество, определяющее типовые свойства системы, ее спо-
собность правлению и внтренние тенденции, неоторю от-
носительно стабильню (посоль инте рирование ведется от
–×) линию поведения и правляемости, ее внтреннюю моти-
вацию.
Управление и воздействие среды мо т быть независимы, но
мо т быть и зависимы, если правляющая система распола ает
априорной информацией относительно X или оценивает х на ин-
тервале [0, T ], а среда может иметь информацию относительно U
или оценивать u на интервале [0, T ].
Рассмотрим частные слчаи.
1 k,
u
ˆ
τˆ
u
u
ˆ
τˆ
u
0
T
∫
Э[Y(t), T, C] l Э
*
при u(X) ô U,
P
u
(u(t, τ
u
(t))) l P
*
,
P
u
(t)dt = E
*
ô E
s
,
⎩
⎨
⎧
Y
∞−
t τ−
∫
⎭
⎬
⎫
1 k,
259
1. Фнция Ф таова, что влияние τ на (s – δ
i
)dF
i
((s, t),t),
i = , пренебрежимо мало; в этом слчае
= Ф[t, Y(t), x(t, τ
x
), u(t, τ
u
)]. (7.23)
Если, роме то о, Ф — линейная фнция и τ
u
= 0, x = 0, то
= AY + u + f (t). (7.24)
Это задача про раммно о правления, харатерная для техни-
чесих систем, оторая решается известными методами. Если
x ≠ 0, то
= AY + x + u + f (t )(7.25)
и это есть правление в словиях содействия или противодейс-
твия. В слчае f (t) = 0 и
= AY + u + ξ, (7.26)
де ξ — слчайная фнция, то правление стохастичесое.
2. Фнция Ф слабо зависит от (s)dF
i
((s, t),t), i = ,
в этом слчае
= Ф[t, Y(t), Y(t – τ), x(t – τ
x
), u(t – τ
u
)], (7.27)
правление не опирается на мотивацию, но сщественно зависит
от ситации на интервале [t – τ, t]. Это ситационное правление.
При линейной Ф и f (t) = 0
= A
1
Y(t) + A
2
Y(t – τ) + x(t – τ
x
) + u(t – τ
u
), (7.28)
де A
1
и A
2
— матрицы оэффициентов. Решение (7.28) (если оно
сществет) дости ается типовыми методами. Задачи ситацион-
но о правления (7.27) и (7.28) харатерны для производствен-
ных систем.
⎩
⎨
⎧
Y
∞−
t τ−
∫
⎭
⎬
⎫
1 k,
dY
dt
------
dY
dt
------
dY
dt
------
dY
dt
------
⎩
⎨
⎧
Y
∞−
t
∫
⎭
⎬
⎫
1 k,
dY
dt
------
dY
dt
------
260
3. Фнция Ф линейная и от t непосредственно не зависит.
То да
= A
1
Y(t) + A
2
Y(t – τ) + dF
1
((s, t),t) + ...
... + dF
k
((s, t),t) + x(t, τ
x
) + u(t – τ
u
). (7.29)
Этот слчай харатерен для нейтральной среды (слчайной
либо, по райней мере, не зависящей от u). Достижение высоой
эффетивности возможно тольо птем приспособления сложив-
шихся на интервале [–×, t – τ] свойств системы изменению си-
тации, сладывающейся на интервале [t – τ, T], т. е. птем адап-
тации системы, средством оторой является правление. Это
адаптивное правление, применяемое в слчае, если влияние тра-
диций не очень сильно, во всяом слчае их можно перестроить
на относительно оротом интервале времени.
4. Фнция Ф зависит от t
= Фt, Y(t), Y(t – τ), dF
1
(s, t), t), ...
... + dF
k
((s, t), t) + x(t, τ
x
) + u(t, τ
u
) . (7.30)
Стро ое эффетивное правление невозможно. Управление долж-
но влиять на внтреннюю мотивацию системы; это достижимо, ес-
ли мотивация системы известна (хотя бы частично). Оптимальных
(в смысле max Э) решений не сществет. Управление рефлесивное.
Рефлесивное правление может оазаться эффетивным, ес-
ли е о применять на интервале времени T
u
° T. В этом слчае вли-
яние τ и δ незначительно и
= Фt, Y, dF
1
((s, t), t), ..., dF
k
((s, t), t), ...
..., dF
1u
((s, t), u(t, τ
u
), ...
..., dF
ku
((s, t), u(t, τ
u
), x(t, τ
x
) . (7.31)
dY t()
dt
-------------
Ys δ
1
−()
∞−
t τ−
∫
Ys δ
k
−()
∞−
t τ−
∫
dY
dt
------
Yt δ
1
−()
∞−
t τ−
∫
Yt δ
1
−()
∞−
t τ−
∫
dY
dt
------
Yt()
∞−
T
u
∫
Yt()
T
u
t
∫
Yt()
T
u
t
∫
Yt()
T
u
t
∫
261
Управление эффетивно оценивается на интервале (0, T) и
изменяет мотивацию системы на интервале [t – T
u
, t], таим об-
разом, что она начинает действовать в соответствии с намерени-
ями правляющей системы.
5. Управление начинается с неоторо о фисированно о мо-
мента времени
= Ф
*
t, Y (t), Y(t – τ), (t – δ
1
)d ((s, t), t), ...
..., (t – δ
k
)d ((s, t), t), x(t, τ
x
), u(t, τ
u
), (7.32)
де Ф
*
= Ф
*
(u
*
, τ
*
, Ф), = (u
*
, τ
*
, )
В резльтате правления u
*
на интервале [t
*
– τ
*
, T
*
], фнция
Ф меняется на Ф
*
, F
i
— на , преобразется стртра системы.
Это процесс формирования новой системы, начинающей фн-
ционировать в момент t
*
под действием: внтренних фаторов, т. е.
взаимодействия дости ающих определенно о ровня процессов
(самоор анизация), или заонсервированной и стимлиремой в
момент t
u
= t
*
– τ
*
про раммы, или под действием внешних фа-
торов (ор анизация). В новой системе мотивация наапливается
на интервале [t
*
, t – τ] и действет новое правление u(t, τ
u
).
Управление самоор анизацией (или ор анизацией) состоит в
1) разршении старой стртры до ровня элементов, оторые
требются для новой системы и подлежат сохранению; 2) созда-
нии новой стртры; 3) под отове системы восприятию п-
равления u(t, τ
u
); 4) блоировании небла оприятно о (в частнос-
ти, мешающе о самоор анизации) воздействия среды, по отно-
шению оторой преобразющаяся система беззащитна.
Рассмотрим виды правления сложной системой.
Адаптивное правление с подражательным механизмом. В тео-
рии правления рассматриваются методы адаптации стохасти-
чесой ситации, оптимальные в среднем. Однао для сложных
систем харатерны неповторяющиеся ситации поведения. Для
единичных ситаций известные методы стохастичесой адапта-
ции малопри одны.
Сществет метод, находящийся на стые стохастичесой оп-
тимизации и целенаправленно о поведения, — метод массовых
проб. Ситация не стохастична, она не описывается статистичес-
ими заонами, и с этим ниче о нельзя сделать. Но можно пре-
dY
dt
------
Y
t
*
t τ−
∫
F
1
*
Y
t
*
t τ−
∫
F
k
*
F
i
*
F
i
*
F
i
F
i
*