Лобанов А.Н. Фотограмметрия
Подождите немного. Документ загружается.

Для теоретического обоснования способа используем формулы
(9.12), выражающие зависимость между координатами х и у точки
снимка и координатами X, У и 1 соответственной точки местности.
Пусть известны приближенные значения элементов ориентиро-
вания снимка. Вычислим по формулам (9.12) координаты х и у изо-
бражений опорных точек на снимке и обозначим их через (х) и'
л
(у).
Очевидно, вычисленные координаты будут отличаться от измерен-
ных х и у. Обозначим поправки к приближенным значениям элемен-
тов ориентирования через 6Х
5
, 6У
5
, 62
3
, 6а, бсо, бх, 6Д 6л;
0
и 8у
0
.
Полагая, что имеем избыточные измерения, составим уравне-
ния поправок
'<> ++ +1Й-
вг
* ++
,
дХ
К I
дХ
Я I
дХ
XI 1
дХ
I
дХ
К
+ —-бсо +— бх + —б/
б.ДГо
+ —бу
0
—* =
дсо дх д! дх
0
ду
0
•
д
У * I
д
У с ;
д
У I
д
У « I
д
У я
1
—
1
— 6ш+ —— бх + —— 6} + — 0*0 + —-оуо— У = «.
да дх д{ дх
0
ду
0
Найдем частную производную от х по Х
5
, обозначив числители
и знаменатель в равенствах (9.12) через X*, У*, 2* соответственно,
дх — а^' + а'Х*- 1 . ,, .
— =— / =—[а^ + а
3
(* —* о)].
дХ
3
г* 2*
Вычислим другую производную
дх _ ^Х*2* —2*Х*
да ' 2*
согласно (9.12) и (9.8):
X*' = (X — Хз) ( — 51П а
соз X —
соз а зт
со
зт
х) -{-
(У — К 5)
0
+
+ (2
—
2з)
(соз
а
соз
х
— $1П
а зт
со
зт
х)
=
—
с
г
(X
—
Х$) + а
х
(2
—
2
5
);
2* = (X
—
Х3) (— соз а соз
со)
+ (У
—
У
5
)
0
+ (2
—
2
В
) X
X (— зт а
соз со)
= с
3
(X
—
Х5) + а
3
(2
—
2
5
).
Следовательно,
, /
2
* —*о
' 2*
390
[
С1
(X - Х
5
) -
Я!
(2 - 2
5
) +
[Сз (X - Хз) — а, (2 -
2<,') 1
Аналогично получим остальные частные производные. В резуль-
тате будем иметь
дх
1
дХ
3
дх 1
=
1
+ Ь
3
(х — х
0
)];
дх
1
дг
8
2*
дх
1
да 2
х — х
0
[с
1
(Х-Х
3
)-а
1
(2-2
3
)] +
[с
3
(Х-Х
3
)-а
э
(2-2
3
)];
дх
е =
——
=
— }
зт х + (х — х
0
)
дсо
Т.*
соз
со
дх
дх
дх
ду о
=
У
—
Уо,
= 0;
дх
X
—
д!
дх
Л
= — = 1;
дх
а
ду
1
ду
дУ
3
ду
[Ы + ^з (у — г/о)];
Ш + с
3
(у — уо)У.
д2
3
2*
ди 1
-г—=—МХ-Х
3
)-аг(2-2
3
)] +
да 2*
у — г/о
2*
ду
[
Сз
(Х-Х
3
)-а
3
(2-2
3
)у,
= —/сози + (у
—
Уо)(^ со + Т^т);
\ 2* соз 0) /
Г
д(0
ду
ди
ду
А'="Г~ = 0;
дх„
(х—х
0
у,
д</ 1
&'=^7~ = -г(г/ —г/о);
д! г
дуо
а.
Таким образом, уравнения поправок можно представить в виде
абх
3
+ Ь8У
3
+ сЬ2
3
+ йЬа + ебш + /бх + §б/ +
И&х,
+
+ Яуо + (х)—
*
= о;
а'8Х
3
+ 6'6К
5
+ с'Ь2
3
+ й'бсс + г'бш + /'бх + г'б/ +
+ л'бх
0
++ (у) — у = о'.
(20.2)
391.
Одна опорная точка дает два уравнения с девятью неизвестными
и весами р и р". Следовательно, для решения задачи необходимо
не менее пяти точек.
Уравнения (20.2) решаются под условием
[ра
2
+ р V
2
] = ппп
методом последовательных приближений. Для этого сначала из
меряют координаты опорных точек на снимке. Затем по прибли-
женным значениям элементов ориентирования (начальное прибли-
жение) вычисляют координаты (х) и (у) тех же опорных точек на
снимке и коэффициенты уравнений поправок. Составляют уравне-
ния поправок и нормальные уравнения. Решают нормальные урав-
нения, в результате чего получают поправки к начальному при-
ближению. Введя эти поправки, находят первое приближение не-
известных. Используя первое приближение, вновь вычисляют ве-
личины (х) и (у) и коэффициенты уравнений поправок. Составляют
новые уравнения поправок и нормальные уравнения, в результате
решения которых получают поправки к первому приближению
и второе приближение неизвестных.
Вычисления продолжают до тех пор, пока разность значений
каждого неизвестного в двух последних приближениях не будет
меньше установленного допуска. При подсчете этого допуска учи-
тываются требуемая точность определения элементов ориентирова-
ния, а также точность построения и измерения снимков.
Для оценки точности решения задачи в последнем приближении
вычисляют весовые коэффициенты и поправки V. Находят ошибку
единицы веса
где п — число опорных точек. Затем вычисляют средние квадра-
тические ошибки элементов
т
23 = I
х
л/^; = ее;
т
у
0
= ^ У^ЭЭ.
Если элементы внутреннего ориентирования снимка известны
с достаточной точностью, то в уравнениях (20.2) будет только шесть
неизвестных, для определения которых необходимо иметь не менее
трех опорных точек.
Изложенный выше'способ пригоден для снимков с любыми эле-
ментами ориентирования. Если угловые элементы внешнего ориен-
392.
(20.3)
т
у
3
= У^;
т
(й = и У
т
х
0
= р У^;
(20.4)
тирования малы, то уравнения (20.2) можно представить в таком
виде:
I „„ , * „„ , (
с
, ^ , ху
?3-2
—
ух
—
!
!
б[—х
0
+ х — (х) = 0-,
У
(20.5)
4- XX — — 6( — у
0
+ у
—
(у) = V'.
Задачу и в этом случае решают путем последовательных прибли-
жений, полагая, что в начальном приближении элементы а, со, х,
х
о>
Уо равны нулю.
Способ, рассмотренный в данном параграфе, позволяет при опре-
делении элементов внешнего ориентирования учесть влияние эле-
ментов внутреннего ориентирования, величины которых в полете
могут отличаться от значений, полученных в лабораторных усло-
виях.
В случае равнинной местности системы уравнений (20.2) и (20.5)
плохо обусловлены и точность определения элементов внутреннего
ориентирования недостаточна.
Способ используется и для решения нетопографических задач,
например, для определения траектории, скорости и колебаний са-
молета и других носителей.
§ 141. Определение элементов ориентирования снимка
по звездам
Рассмотрим способ, позволяющий определить направление глав-
ного луча, угол поворота снимка и элементы внутреннего ориенти-
рования по звездам, изобразившимся на снимке.
На рис. 257: РР' — ось мира; Р — северный полюс мира; |ЗВ —
небесный экватор, у — точка весеннего равноденствия.
Совместим начало прямоугольной системы координат XV2 с
центром 5 небесной сферы, ось 2 — с осью мира, а плоскость XI —
с кругом склонения равноденственных точек.
Пусть при фотографировании звезд с точки 5 оптическая ось
фотокамеры направлена вдоль оси мира. В этом случае плоскость
снимка Р° параллельна плоскости XV. Пусть координатные оси
х° и у
0
снимка соответственно параллельны осям X и V.
Обозначим через / фокусное расстояние фотокамеры, а через
х° и у
0
—• координаты изображения а
0
звезды на снимке Р°. Тогда
можно написать следующие зависимости между экваториальными
координатами звезды и координатами ее изображения:
б = —; 1&а= (20.6)
У
+" уо
2
х
°
393.
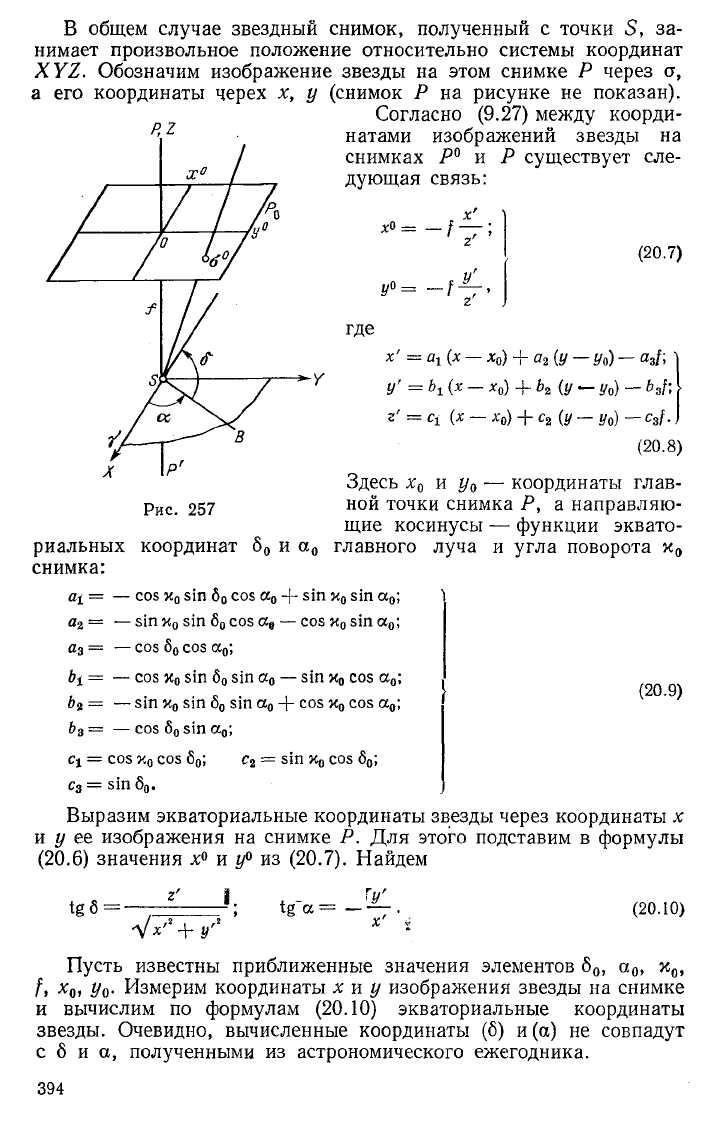
В общем случае звездный снимок, полученный с точки 5, за-
нимает произвольное положение относительно системы координат
ХУ7,. Обозначим изображение звезды на этом снимке Р через с,
а его координаты черех х, у (снимок Р на рисунке не показан).
Согласно (9.27) между коорди-
натами изображений звезды на
снимках Р° и Р существует сле-
дующая связь:
X»
=
X'
/тг;
(20.7)
где
х' = а
1
(х — х
0
) + а
2
{у — у
0
) — а
3
{;
у' =Ь
1
{х — х
0
) + Ь
2
(у — у
0
) — Ь
3
(\'
г' = (х — х
0
) + с
2
(у — 1/
0
) — с
3
/.
]
(20.8)
Здесь х
0
и у
0
— координаты глав-
ной точки снимка Р, а направляю-
щие косинусы — функции эквато-
риальных координат 8
0
и а
0
главного луча и угла поворота х
0
снимка:
а±
=
—
соз х
0
зт б
0
соз
«о
+ зт х
0
зт
ос
0
;
а
2
=
—
зт х
0
зт
б
0
соз а
в
—
соз х
0
зт а
0
;
а
3
=
—
соз
б
0
соз
а
0
;
=
—
соз к
0
зт
б
0
зт а
0
—
зт х
0
соз а
0
;
Ь%
=
—
зт и
0
зт б
0
зт а
0
+ соз щ соз а
0
;
Ь
3
=
—
соз
б
0
зт а
0
;
С\
= соз
у.
0
соз б
0
; с
2
=
8>п
соз б
0
;
Сз
= зт б
0
.
Выразим экваториальные координаты звезды через координаты х
и у ее изображения на снимке Р. Для этого подставим в формулы
(20.6) значения х° и у
0
из (20.7). Найдем
(20.9)
г'
I.
V
+»'
, - V
а =
—
— .
х'
(20.10)
Пусть известны приближенные значения элементов о
0
, к
0
,
Л
х<»
Уо- Измерим координаты х и у изображения звезды на снимке
и вычислим по формулам (20.10) экваториальные координаты
звезды. Очевидно, вычисленные координаты (б) и (а) не совпадут
с б и а, полученными из астрономического ежегодника.
394.
Для определения поправок к приближенным значениям неиз-
вестных напишем
Ф
= б = б)
дд
0
^ а/ '
да
в
д<
р X I
а
Ф .
дх
0
Ф' = {§а = (*8а)
дх
0
ду
0
аф'
аб
0
а®' аф' .
бб
0
+ —ба
0
бк
0
+
да
дх
а
аф' . аф' , _дф^_
б / + ——бх
0
+ -7—6 у
0
.
а/
дх
0
дУо
(20.11)
Частные производные найдем в результате дифференцирования
функций ф и ф':
аф
г
г' соз б
0
+ — (*'
СОЗ
а
0
+ у'
81П
а
0
) б
6;
аф
дао
дф
= 0;
ах
0
= — с
2
х —
1
— — [х' (а
г
у — а
2
х) + у' (Ь
х
у — Ь
2
х)
1§
2
б *§б;
аф
д!
дф
дх
й
аф
т
(а
3
х' + Ъ
3
у') 1§
2
б -с
3
_1_
г'
1
дУй г
аф'
— («!*' +ЬгУ') б —
г
-V (а
2
х' + Ъ
г
у') 1§
2
б — с
2
18 в;
1§б;
=
—
— (зт «о + соз «о а) а;
аб
0
у'
аф'
аа„
аф'
= _(1+*
§
2
а);
1
А'
••
ах
0
аф'
— [ (а
х
у — а
2
х) а + Ь
г
у — Ь
2
х] а;
1
=
—
—
Г
(а
3
а + Ь
3
) а;
д( У
дх
0
у
дф' 1
/' = = — — {а
2
+ Ь
2
) а.
ду
0
У
(20.12)
395.
Пусть имеются избыточные измерения. Тогда уравнения (20.11)
можно представить в таком виде:
абб
0
+
Ь8а
0
+ сбх
0
+ йб/ + е8х
0
+ /б</
0
+ I = V,
а'бб
0
+ 6'ба
0
+ с'био + й'8[ + е'8х
0
+ /%
0
+ /' = о', /
(2
°'
13)
где
/ = (1§б)-1§б; !' = №«) -^а. (20.14)
Одна звезда, изобразившаяся на снимке, дает два уравнения
(20.13) с шестью неизвестными. Таким образом, для решения за-
дачи необходимо не менее трех звезд. Если элементы внутреннего
ориентирования известны и требуется найти только поправки к при-
ближенным значениям элементов внешнего ориентирования снимка,
то задача решается по двум звездам.
Уравнения (20.13) решаются под условием
[рИ
2
+ р'1/'
2
] =
ГП1П
методом последовательных приближений.
Для оценки точности решения задачи в последнем приближении
вычисляют весовые коэффициенты (2 и поправки V и г/. Находят
ошибку единицы веса
У
-- Л/
1
•
где п — число звезд, использованных для определения элементсв
ориентирования снимка.
Затем вычисляют средние квадрэтические ошибки неизвестных
т
0
= ц д/Сп; т[ = ц у (?
44
;
т
а
й
=
Ц
д/С*
22
; т
Хо
= д/р
5б
; (20.16)
т
*о
=
I
х
У ; Щ
0
=
Ц
У
Сое •
Изложенные выше способы определения элементов ориентиро-
вания по опорным точкам и по звездам используются и для выявле-
ния систематических ошибок снимка. В этом случае в уравнения
поправок вводят дополнительные параметры в виде полиномов
различных степеней, например полином (4.41), увеличивая соот-
ветственно количество опорных точек или звезд. Решив уравне-
ния, получают элементы ориентирования снимка и коэффициенты
полинома, позволяющие исключить систематические ошибки из
результатов измерений.
§ 142. Определение углов наклона снимка
по линии горизонта
Этот способ основан на применении дополнительной камеры,
жестко связанной с основной камерой и предназначенной для фо-
тографирования горизонта. Затворы обеих камер работают синх-
ронно.
396.
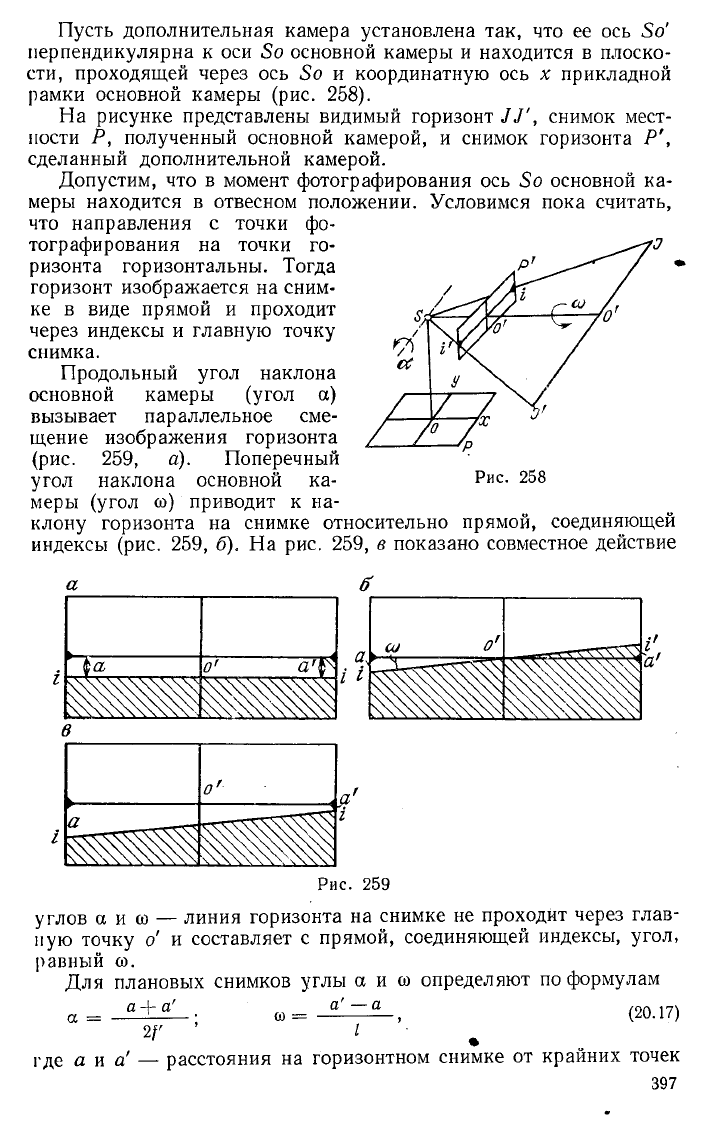
Пусть дополнительная камера установлена так, что ее ось 5о'
перпендикулярна к оси 5о основной камеры и находится в плоско-
сти, проходящей через ось Зо и координатную ось х прикладной
рамки основной камеры (рис. 258).
На рисунке представлены видимый горизонт ]]', снимок мест-
ности Р, полученный основной камерой, и снимок горизонта Р',
сделанный дополнительной камерой.
Допустим, что в момент фотографирования ось Зо основной ка-
меры находится в отвесном положении. Условимся пока считать,
что направления с точки фо-
тографирования на точки го-
ризонта горизонтальны. Тогда
горизонт изображается на сним-
ке в виде прямой и проходит
через индексы и главную точку
снимка.
Продольный угол наклона
основной камеры (угол а)
вызывает параллельное сме-
щение изображения горизонта
(рис. 259, а). Поперечный
угол наклона основной ка-
меры (угол со) приводит к на-
клону горизонта на снимке относительно прямой, соединяющей
индексы (рис. 259, б), На рис. 259, в показано совместное действие
Рис. 258
СО о'
цц
8111
/
а'
Рис. 259
углов а и со — линия горизонта на снимке не проходит через глав-
ную точку о' и составляет с прямой, соединяющей индексы, угол,
равный со.
Для плановых снимков углы а и со определяют по формулам
аа' а'—а
2/'
со
=
(20.17)
где а и а' — расстояния на горизонтном снимке от крайних точек
397
горизонта I и Г до прямой, проходящей через индексы; /' — фокус-
ное расстояние дополнительной камеры; / — длина горизонтного
снимка.
Величина а считается положительной, если точка I находится
выше линии индексов.
Угол со, вычисленный по формуле (20.17), непосредственно
представляет поперечный наклон основного снимка, а в угол а
следует ввести поправки за наклон видимого горизонта и кривизну
Земли.
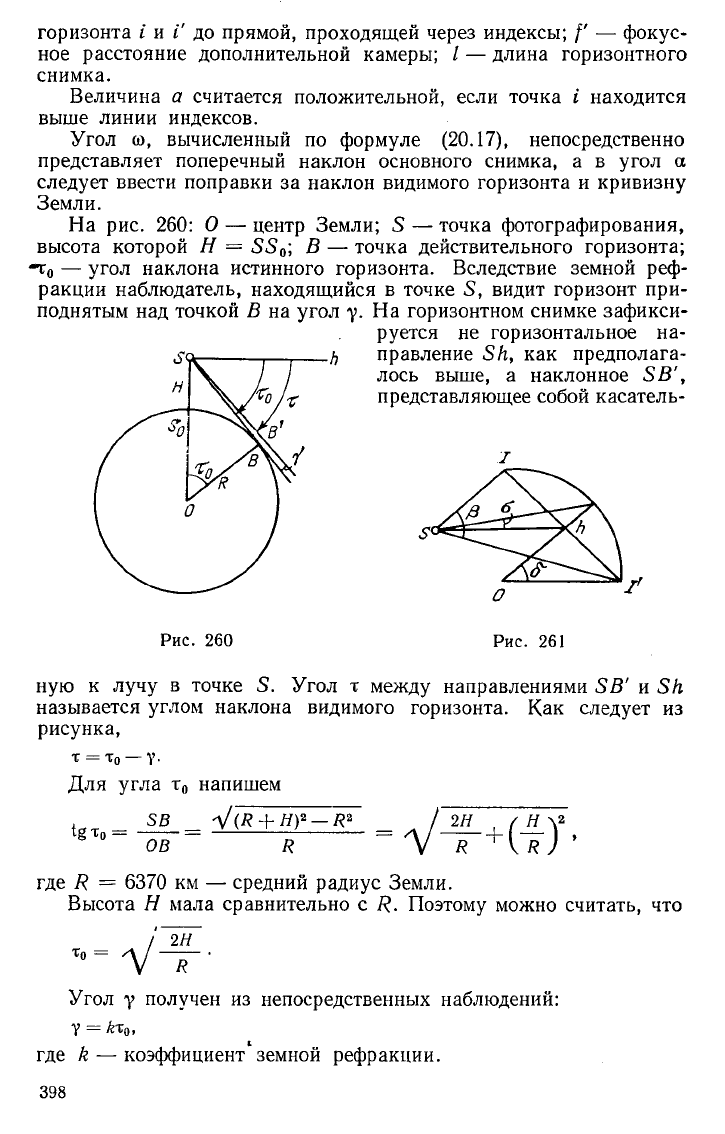
На рис. 260: О — центр Земли; 5 — точка фотографирования,
высота которой Я = 55
0
; В — точка действительного горизонта;
"т
0
— угол наклона истинного горизонта. Вследствие земной реф-
ракции наблюдатель, находящийся в точке 5, видит горизонт при-
поднятым над точкой В на угол у. На горизонтном снимке зафикси-
руется не горизонтальное на-
правление 8к, как предполага-
лось выше, а наклонное 8В',
представляющее собой касатель-
Рис. 260 Рис. 261
ную к лучу в точке 5. Угол т между направлениями 8В' и Зк
называется углом наклона видимого горизонта. Как следует из
рисунка,
т = т
0
—
V-
Для угла т
0
напишем
, 5в У(Д + Щ* — Я
2
/ 2Н / Н у
1§т
°= = Л/я
+
(т) •
где К = 6370 км — средний радиус Земли.
Высота Я мала сравнительно с Поэтому можно считать, что
У
2Н
Угол у получен из непосредственных наблюдений:
У = Лт
0
,
где к — коэффициент земной рефракции.
398.
Следовательно,
т = т
0
—
6т
0
=
(1
— к) т
0
или
т =
(1
—щ-у/ънт. (20.18)
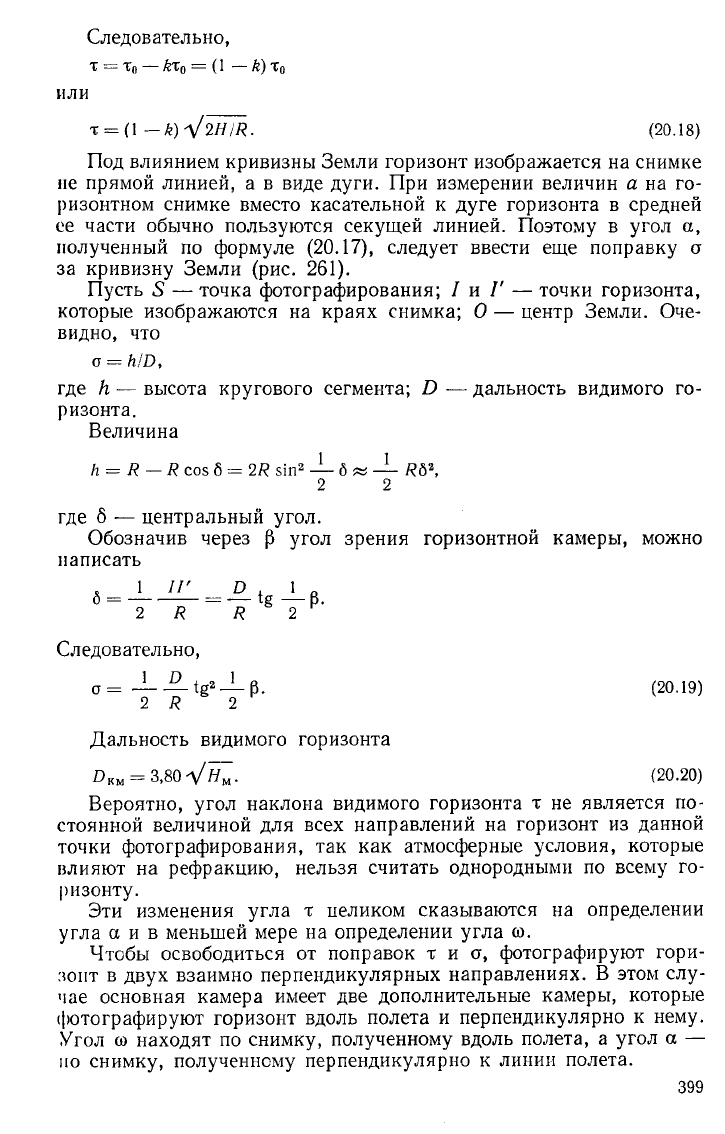
Под влиянием кривизны Земли горизонт изображается на снимке
не прямой линией, а в виде дуги. При измерении величин а на го-
ризонтном снимке вместо касательной к дуге горизонта в средней
ее части обычно пользуются секущей линией. Поэтому в угол а,
полученный по формуле (20.17), следует ввести еще поправку сг
за кривизну Земли (рис. 261).
Пусть 5 — точка фотографирования; / и /' — точки горизонта,
которые изображаются на краях снимка; О — центр Земли. Оче-
видно, что
а = к! О,
где к — высота кругового сегмента; О — дальность видимого го-
ризонта.
Величина
к = Я — Я соз
б
= 2/? 5Ш
2
—
б
да
— ЯЬ
2
,
2 2
где б •— центральный угол.
Обозначив через угол зрения горизонтной камеры, можно
написать
2 Я Я 2
Следовательно,
1 п
+ 2
1
Я
а= *§
2
—р.
2 Я 2
Дальность видимого горизонта
(20.19)
0
КМ
= 3,80У//
М
. (20.20)
Вероятно, угол наклона видимого горизонта т не является по-
стоянной величиной для всех направлений на горизонт из данной
точки фотографирования, так как атмосферные условия, которые
влияют на рефракцию, нельзя считать однородными по всему го-
ризонту.
Эти изменения угла т целиком сказываются на определении
угла айв меньшей мере на определении угла со.
Чтобы освободиться от поправок т и а, фотографируют гори-
зонт в двух взаимно перпендикулярных направлениях. В этом слу-
чае основная камера имеет две дополнительные камеры, которые
фотографируют горизонт вдоль полета и перпендикулярно к нему.
Угол со находят по снимку, полученному вдоль полета, а угол а —
по снимку, полученному перпендикулярно к линии полета.
399.