Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


14
-6 Robotics and Automation Handbook
friction regime. Because of the parameter v
s,i
, the model (14.12) cannot be represented linearly in all
friction parameters (v
s,i
, α
0,i
, α
1,i
, and α
2,i
). Thus, a joined regressor form of a robot dynamic model is
not possible with the model (14.12). This prevents simultaneous estimation of the friction parameters and
the BPS elements, using, for example, some time-efficient least-squares technique.
Dynamic friction models aim at covering more versatile friction phenomena. Among others (see surveys
in [15,16]), the Dahl and the LuGre models are the most frequently cited, analysed, and implemented
dynamic models. They cover a number of static and dynamic friction phenomena and facilitate their
representation in a compact way. The LuGre model is more comprehensive than the Dahl one, and it has
the following form:
σ
0,i
z
i
+ σ
1,i
˙
z
i
+ α
2,i
˙
q
i
= τ
f
i
˙
z
i
=
˙
q
i
− σ
0,i
|
˙
q
i
|
γ (
˙
q
i
)
z
i
(i = 1, ..., n)
(14.13)
where z
i
is a presliding deflection of materials in contact, γ (
˙
q
i
)isdefined by Equation (14.12), while σ
0,i
and σ
1,i
are the stiffness of presliding deflections and viscous damping of the deflections, respectively.
Notice that the static model (14.12) corresponds to the sliding behaviour (
˙
z
i
= 0) of the LuGre model.
A drawback of the LuGre model is that for some choices of its coefficients, the passivity condition from
speed
˙
q
i
to friction force τ
f
i
is easily violated [18]. This condition reflects the dissipative nature of friction.
Without the passivity property, the LuGre model admits periodic solutions, which is not realistic friction
behavior. On the other hand, a linear parameterization of the LuGre model is obviously not possible, and
consequently, the joined regressor form of a dynamic model cannot be created.
A neural-network friction model is also used [19]
3
k=1
f
i,k
[1 −2/(exp(2w
i,k
˙
q
i
) +1)] + α
2,i
˙
q
i
= τ
f
i
(i = 1, ..., n) (14.14)
where f
i,k
, w
i,k
, and α
2,i
are unknown parameters. This static model can represent Stribeck, Coulomb,
and viscous effects, and it admits a straightforward online implementation. However, it cannot be linearly
parameterized, and consequently, the joined regressor form of a dynamic model is not possible with this
model.
When the robot model is completed, the next step is to obtain realistic values for the model parameters.
These parameters are acquired via estimation procedures, that are explained in the next section.
14.3 Estimation of Model Parameters
Anestimation of frictionparameterswillbe explained first in this section. Friction parameters areestimated
separately from the BPS elements if the joined regressor form of a robot dynamic model cannot be created.
Then, brief descriptions of two methods for estimation of the BPS elements will be given.
14.3.1 Estimation of Friction Parameters
Unknown parameters of a friction model associated with the joint i can be collected in the vector p
f
i
.
Elements of this vector can be estimated on the basis of identification experiments in open-loop. In
each experiment, the considered joint is driven with a sufficiently exciting control input τ
i
, and the
corresponding motion q
i
is measured. The remaining joints are kept locked by means of appropriate
hardware or by feedback control. In the latter case, the feedback controllers must be tuned such that the
motions in the remaining joints, possibly caused by the couplings effects and by gravity, are prevented.
The dynamics for joint i can be represented as
¨
q
i
=
τ
i
− τ
f
i
p
f
i
− c
i
sin q
i
/J
i
(14.15)
Copyright © 2005 by CRC Press LLC

Modeling and Identification for Robot Motion Control 14
-7
where J
i
is the equivalent moment of inertia of the joint, and c
i
isacoefficient of the gravity term. This
term vanishes if the axis of joint motion is parallel with the direction of gravity. The parameters J
i
and c
i
are usually not known exactly, so they need to be estimated together with the friction parameters.
An efficient time-domain identification procedure elaborated in [19] can be carried out to estimate
friction parameters of a static friction model together with J
i
and c
i
from Equation (14.15). This procedure
engages a recursive Extended Kalman filtering technique for nonlinear continuous-time processes. The
procedure recursively updates estimates, until convergence of all unknown parameters is reached. Friction
parameters characteristic to the presliding friction regime of the LuGre model (14.13), i.e., σ
0,i
and σ
1,i
, can
be estimated using frequency response function (FRF) measurements, as explained in [20]. This procedure
requires an experiment where the considered joint is driven with a random excitation (noise) and the FRF
from the excitation τ
i
to the motion q
i
is measured. A low noise level is needed, so as to keep friction
within the presliding regime. Joint position sensors of high resolution are thus necessary, because very
small displacements have to be detected. The estimation procedure employs a linearization of (14.13)
around zero
˙
q
i
, z
i
, and
˙
z
i
,defined in Laplace domain:
H
i
(s) =
Q
i
(s)
τ
i
(s)
=
1
J
i
s
2
+ (σ
1,i
+ α
2,i
)s + σ
0,i
+ c
i
(14.16)
The parameters α
2,i
and c
i
must be known beforehand. The transfer function (14.16) can be fitted into
the measured FRF to determine the unknown σ
0,i
and σ
1,i
.
14.3.2 Estimation of BPS Elements
Assume that friction models associated with the robot joints reconstruct realistic friction phenomena
sufficiently accurately. If this is the case, then the friction component τ
f
is completely determined in a
robot rigid-body dynamic model (14.6), as well as in the corresponding regressor representation (14.10).
This facilitates estimation of the elements of the BPS set, using identification experiments. During the
experiment the robot is controlled with decoupled PD (proportional, derivative) controllers to realize a
specific trajectory. This trajectory must be carefully chosen such that the corresponding control input
τ (t)sufficiently excites all system dynamics. If the applied τ (t) and the resulting q(t),
˙
q(t), and
¨
q(t)are
collected during the experiment, and postprocessed to determine elements of the BPS, then we speak about
batch estimation. If the estimation of the BPS is performed as the identification experiment is going on,
then we speak about online estimation.
14.3.2.1 Batch LS Estimation of BPS
Assume ζ samples of each element of τ , q,
˙
q, and
¨
q have been collected. These samples correspond to time
instants t
1
, t
2
, ..., t
ζ
. By virtue of (14.10), we may form the following system of equations:
Φ · p = y
(14.17)
Φ =
R(q(t
1
),
˙
q(t
1
),
¨
q(t
1
))
R(q(t
2
),
˙
q(t
2
),
¨
q(t
2
))
.
.
.
R(q(t
ζ
),
˙
q(t
ζ
),
¨
q(t
ζ
))
(14.18)
y = [(τ (t
1
) −τ
f
(t
1
))
T
,(τ (t
2
) −τ
f
(t
2
))
T
, ...,(τ (t
ζ
) −τ
f
(t
ζ
))
T
]
T
(14.19)
If the input τ (t)sufficiently excites the manipulator dynamics, then the LS (least-squares) estimate of
p is
ˆ
p = Φ
#
y (14.20)
Copyright © 2005 by CRC Press LLC

14
-8 Robotics and Automation Handbook
where # denotes a matrix pseudoinverse [21]. There are several criteria evaluating sufficiency of excitation.
The usual one is the condition number of Φ,defined as the ratio between maximal and minimal singular
values of Φ. If this number is closer to 1, the excitation is considered better for a reliable estimation of p.In
[4] several other performance criteria are also listed, such as the largest singular value of Φ, the Frobenius
condition number of Φ, and the determinant of the weighted product between Φ and its transpose.
14.3.2.2 Online Gradient Estimator of BPS
Among several solutions for online estimation of the BPS elements [22], the gradient estimator is the
simplest choice. It resorts to the concept of prediction error. If an estimate
ˆ
p of the BPS is available and the
friction component τ
f
is known, then the model (14.10) can be used to predict the difference between
the control input and friction:
R(q(t),
˙
q(t),
¨
q(t))
ˆ
p =
ˆ
τ (t) −τ
f
(t) =
ˆ
τ
d
(t)
(14.21)
The prediction error
˜
τ
d
is formed as the difference between
ˆ
τ
d
(t) and the measured τ
d
(t) = τ (t) −
τ
f
(t):
˜
τ
d
(t) =
ˆ
τ
d
(t) − τ
d
(t)
= R(q,
˙
q,
¨
q)
ˆ
p − R(q,
˙
q,
¨
q)p
= R(q,
˙
q,
¨
q)
˜
p
(14.22)
where
˜
p =
ˆ
p − p is the BPS estimation error. The following update law enables online estimation of the
BPS:
˙
ˆ
p =−αR
T
(q,
˙
q,
¨
q)
˜
τ
d
(14.23)
where α is a positive scalar estimation gain. In the given law, the unknown parameters are updated in the
converse direction of the gradient of the squared prediction error with respect to the parameters [22].
As in the batch LS estimation, the quality of the BPS estimates achieved with (14.23) strongly depends
on the choice of a trajectory the robot realizes during the identification experiment. Design of such a
trajectory deserves special attention.
14.3.3 Design of Exciting Trajectory
The robot trajectory, which is realized during the identification experiment, is called the exciting trajectory.
There are several designs of such a trajectory available in literature, and they are briefly summarized in
[12]. A design suggested in [11] and [12] postulates the exciting trajectory as finite Fourier series with
predefined fundamental frequency and with free coefficients:
q
exc
i
(t) = q
0,i
+
N
j=1
1
j2πf
[a
ij
sin( j 2πft) −b
ij
cos( j2πft)] (i = 1, ..., n) (14.24)
Here, f [Hz] is the desired resolution of the frequency content, the number of harmonics N determines
the bandwidth of the trajectory, and the free coefficients q
0,i
, a
ij
, and b
ij
(i = 1, ..., n; j = 1, ..., N)
should be determined such that all manipulator rigid-body dynamics are sufficiently excited during the
identification experiment. The given exciting trajectory is periodic, which enables continuous repetition
of the identification experiment and averaging of measured data to improve the signal-to-noise ratio.
Additional advantages are direct control of the resolution and of the bandwidth of the trajectory harmonic
content. The control of the bandwidth is an important precaution for avoiding frequency components
that excite the robot flexible modes.
Copyright © 2005 by CRC Press LLC
Modeling and Identification for Robot Motion Control 14
-9
The exciting trajectory can be realized on the robotic systems using a PD feedback controller:
τ =−K
p
(q − q
exc
) −K
d
(
˙
q −
˙
q
exc
) (14.25)
whereK
p
=diag[k
p,1
, ..., k
p,n
] and K
d
=diag[k
d,1
, ..., k
d,n
] are matricesof positiveposition and velocity
gains, respectively. The applied τ sufficiently excites the system rigid-body dynamics if the free coefficients
in (14.24) are determined by optimising some property of the information matrix Φ (e.g., the condition
number of Φ). No matter which property (performance criterion) is adopted, the resulting optimization
problem is nonconvex and nonlinear. Different initial conditions may lead to different exciting trajectories,
allcorrespondingto local minimaof theperformance criterion.Consequently,the optimization determines
a suboptimal, rather than the globally optimal exciting trajectory. Still, experience shows that use of
suboptimal trajectories gives satisfactory results.
The presence of disturbances in the collected q,
˙
q, and
¨
q affects the quality of the estimation methods
(14.20) and (14.23). The quality is better if disturbances are reduced to a minimum. High-frequency
quantization noise and vibrations caused by flexibilities are disturbances commonly found in robot man-
pulators. By reconstruction of joint motions, speeds, and accelerations with carefully tuned Kalman filters
[9,10], a sufficient rejection of the disturbances can be achieved.
14.3.4 Online Reconstruction of Joint Motions, Speeds, and Accelerations
Online reconstruction of q,
˙
q, and
¨
q using a Kalman filter will be formulated in discrete-time, assuming a
digital setup for data-acquisition from a robot joint. It is proven in [10] that at sufficiently high sampling
rates, usual in modern robotics, the discrete Kalman filter associated with the motion of a robot joint i can
be constructed assuming an all-integrator model for this motion. This model includes a correcting term
ν
i
, representing the model uncertainty. It accounts for the difference between the adopted model and the
real joint dynamics. The correcting term is a realization of the white process noise ξ
i
, filtered through a
linear, stable, all-pole transfer function. With the correcting term used, the reconstruction of q,
˙
q, and
¨
q
requires at least a third-order model.
As a case-study, we assume that ξ
i
is filtered through just a single integrator. A continuous-time model
associated to the motion in the joint i has the form:
¨
q
i
=
¨
q
r,i
+ ν
i
˙
ν
i
= ξ
i
˜
y
i
=q
i
+ η
i
(14.26)
where
¨
q
r,i
is the desired joint acceleration, and η
i
is the measurement noise. In the model (14.26), the joint
motion q
i
is regarded as the only measured coordinate. In the design of the Kalman filter the deviation
from the desired joint motion q
r,i
e
i
= q
i
−q
r,i
(14.27)
and its time derivative can be adopted as the states to be reconstructed, rather than the motion coordinates
themselves. In such a way, the state reconstruction process is merely for the deviation from the expected,
or modelled, trajectory [10]. Let T
s
denote themselves the sampling time used for both data-acquisition
and control. We may determine a discrete-time system involving identical solutions with the model that
arises after substituting Equation (14.26) into Equation (14.27) at t = kT
s
:
x
i
(k + 1) = E
i
(T
s
)x
i
(k) + g
i
(T
s
)ξ
i
(k)
˜
y
i
(k) = c
i
x
i
(k) +q
r,i
(k) + η
i
(k) (14.28)
Copyright © 2005 by CRC Press LLC
14
-10 Robotics and Automation Handbook
where
x
i
(k) = [e
i
(k),
˙
e
i
(k), ν
i
(k)]
T
(14.29a)
E
i
=
1 T
s
0.5T
2
s
01 T
s
00 1
, g
i
=
T
3
s
/6
0.5T
2
s
T
s
(14.29b)
c
i
= [100]
(14.29c)
Here, k abbreviates kT
s
. A Kalman filter that optimally reconstructs the state x
i
in the presence of the
model uncertainty ν
i
and measurement noise η
i
has the form:
ˆ
x
i
(k + 1) = E
i
(T
s
)
¯
x
i
(k)
¯
x
i
(k) =
ˆ
x
i
(k) + k
i
[
˜
y
i
(k) −q
r,i
(k) − c
i
ˆ
x
i
(k)] (14.30)
where
¯
x
i
denotes updated state estimate and k
i
is a n ×1 vector of constant gains. As the filter reconstructs
deviations from the reference motions and speeds, together with the model uncertainty, the motion
coordinates can be reconstructed as follows:
¯
q
i
=q
r,i
+
¯
e
i
¯
˙
q
i
=
˙
q
r,i
+
¯
˙
e
i
¯
¨
q
i
=
¨
q
r,i
+
¯
ν
i
(14.31)
To compute the vector k
i
, one needs covariances of the measurement noise η
i
and of the process noise
ξ
i
. Assuming white, zero mean quantization noise, uniformly distributed within a resolution increment
θ
m
of the position sensor, the straightforward choice for η
i
is θ
2
m
/12 (see [10] for details). The reference
[9] suggests a simple rule to choose ξ
i
: it should equal max
¨
q
2
r,i
(maximum value of the square jerk of
the motion reference). In practice, these rules are used as initial choices, while the final tuning is most
effectively done online. However, use of Bode plots from the measured e
i
to the reconstructed
¯
e
i
— an
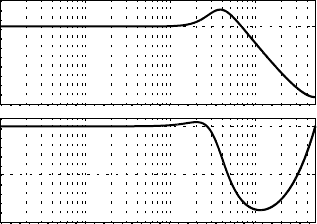
illustrative example is presented in Figure 14.2 — could be instructive for filter tuning. The Bode plots
reveal which harmonics of e
i
will be amplified after reconstruction, as well as which harmonics will be
attenuated. By analyzing the power spectrum of e
i
, a control engineer may locate spectral components
due to noise and other disturbing effects, that need to be filtered out. The gain vector k
i
can be retuned to
reshape the Bode plot according to the needs.
−15
0
5
Magnitude (dB)
0.1
1
10
100
−60
−30
0
Frequency (Hz)
Phase (
o
)
FIGURE 14.2 Bode plots of the Kalman filter, from the measured e
i
to the reconstructed
¯
e
i
.
Copyright © 2005 by CRC Press LLC
Modeling and Identification for Robot Motion Control 14
-11
14.4 Model Validation
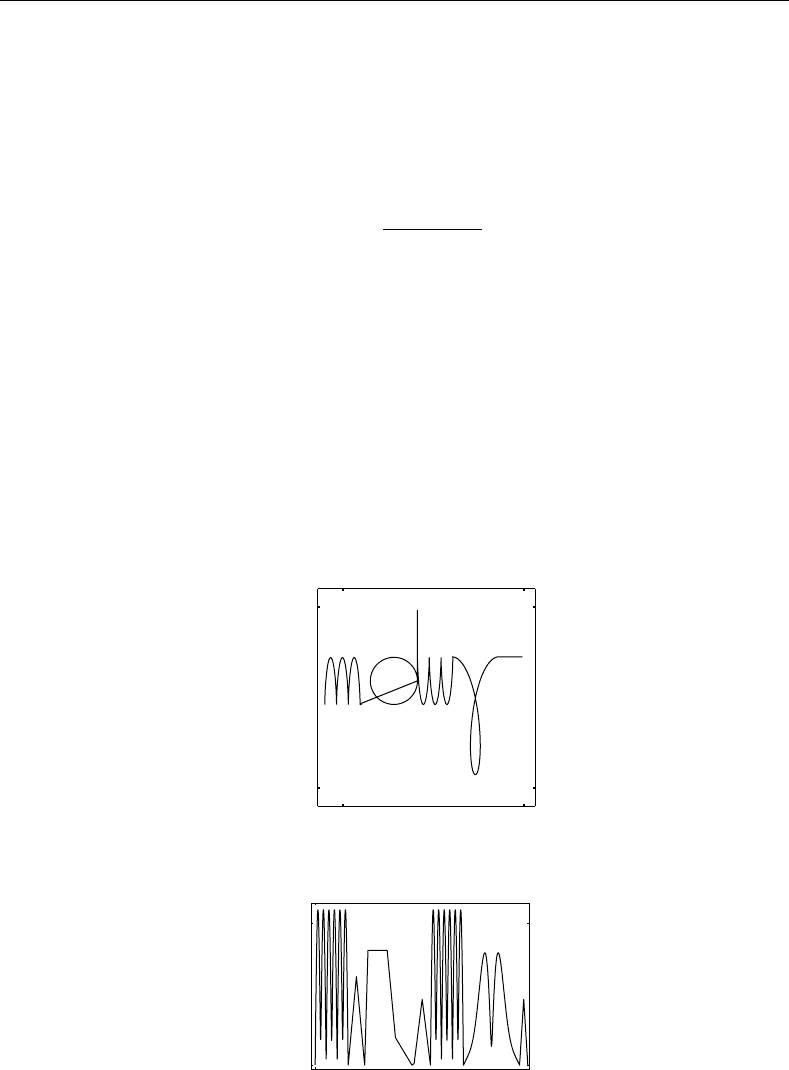
Writing and drawing tasks can be useful for model validation, because they require complex non-smooth
motions, and their execution may induce significant dynamic forces/torques. An extensive study of human
handwriting is given in [13]. This reference considers one representative writing task: the sequence of letters
shown in Figure 14.3a. The given sequence is a concatenation of motion primitives typically executed by
robots. Mathematically, the sequence can be piecewise described in closed-form, with the possibility of
imposing an arbitrary velocity profile. One may use this freedom to pose very demanding dynamic tasks,
that can be used for a rigorous verification of robot kinematic and dynamic models.
For example, the robot-tip should realize the sequence of letters with the velocity profile
v(t) =
˙
x
2
(t) +
˙
z
2
(t) (14.32)
presented in Figure 14.3b. The given profile has fast and slow phases. Figure 14.3a and Figure 14.3b
define the reference trajectory of the robot-tip. An inverse kinematics model can be used to determine
the corresponding reference joint motions q
r
(t). Along these motions a dynamic model can be validated.
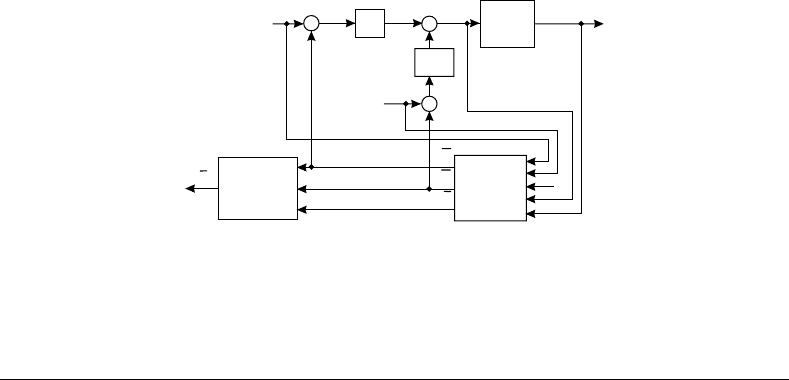
The organization of the validation experiment is illustrated in Figure 14.4. The objective is to test how
accurately the output
¯
τ of the dynamic model, which is fed by online reconstructed joint motions, speeds,
and accelerations (see formulas (14.30) and (14.31)), reconstructs control signals generated with PD
controllers:
τ =−K
p
(
¯
q − q
r
) −K
d
(
¯
˙
q −
˙
q
r
) (14.33)
If
¯
τ is close enough to τ , the dynamic model is considered appropriate for control purposes.
−0.25
0.25
0.35
0.85
x
(m)
z
(m)
(a)
0
10
0
0.7
Time (s)
Velocity (m/s)
(b)
FIGURE 14.3 Reference trajectory in the task space: (a) tip path, (b) adopted tip-velocity profile.
Copyright © 2005 by CRC Press LLC
14
-12 Robotics and Automation Handbook
s
q
r
q
q
r
.
q
r
.
.
q
q
.
.
q
.
Robot
Dynamic
model
Kalman
filter
K
p
K
d
++
+
+
−
−
s
FIGURE 14.4 Experimental validation of a robot dynamic model.
14.5 Identification of Dynamics Not Covered with a Rigid-Body
Dynamic Model
In model-based manipulator motion control, a dynamic model is used to compensate for the nonlinear
and coupled manipulator dynamics. To illustrate this, we may consider a motion control problem solved,
for example, using the feedback linearization [23]:
τ (t) = M(q(t))u(t) + c(q(t),
˙
q(t)) + g(q(t)) +τ
f
(t)
(14.34)
Here, u(t) represents a feedback control action which should stabilize the manipulator motion and enforce
the desired accuracy in realizing a reference trajectory q
r
(t). The remaining variables are as in (14.6). When
applied, the control (14.34) should decouple the manipulator dynamics. The problem of controlling the
nonlinear-coupled system shifts to the problem of controlling the linear plants, defined in the Laplace
domain:
P
i
(s) = q
i
(s)/u
i
(s)(i = 1, ..., n)
(14.35)
where u
i
is the ith component of u.
Ideally, the plant transfer function P
i
wouldbe modelled as a single mass (double integrator). The related
frequency response function (FRF) should have a linear amplitude plot with a –2 slope and constant phase
at –180
◦
. This holds if perfectly rigid-body dynamics are completely linearized by Equation (14.34). In
practice this may not happen, as a perfectly rigid mechanical construction is difficult to achieve, and
hence, the rigid-body model is hardly an accurate description of the realistic manipulator dynamics.
Rather than a double integrator, P
i
has a more involved FRF, incorporating resonances and antiresonances
due to flexibilities. The frequencies of these resonances and antiresonances may vary as the manipulator
changes its configuration. The flexible dynamics not covered with the rigid-body model influence feasible
performance and robustness in motion control. Therefore, it is worthwhile spending additional effort on
identifying these dynamics.
Inthe following we sketchtwo standardtechniquescapable of, at least, local identification ofmanipulator
dynamics not covered with the rigid-body model. The first technique is based on spectrum analysis, while
the second one is established in time-domain. Both of them utilize separate identification experiments for
each joint (n experiments for the whole manipulator). Each experiment is performed under closed-loop
conditions, because the dynamics not covered with the rigid-body model might not be asymptotically
stable. For example, when identifying dynamics in joint i, this joint is feedback controlled to realize a slow
motion of a constant speed
˙
q
r,i
, while the remaining ones take some static posture. A low constant speed
is preferable to reduce the influence of friction effects on the quality of identification. The slow motion
is performed within the joint range. If, for example, the range in the revolute joint is not limited, a full
revolution can be made. The direction of movement is changed after reaching the joint limit, or after the
full revolution. Denote with q
r
(t)an(n × 1) vector of set-points, used in the identification experiment.
Copyright © 2005 by CRC Press LLC
Modeling and Identification for Robot Motion Control 14
-13
Elements of q
r
(t) should satisfy
˙
q
r,i
(t) =
˙
q
r,i
and
˙
q
r, j
(t) ≡ 0ifi = j . The specified set-points can be
achieved by applying the control law (14.34) with
u =−K
p
(q − q
r
) −K
d
(
˙
q −
˙
q
r
) +n (14.36)
where K
p
= diag[k
p,1
, ..., k
p,n
] and K
d
= diag[k
d,1
, ..., k
d,n
] are matrices of positive position and
velocity gains, respectively, and the (n × 1) vector n contains a random excitation (noise) as ith element
and zeroselsewhere. Identificationis more reliable if the influenceof disturbances (e.g., quantization noise)
affecting the manipulator motion and speed is low. For that purpose, M, c, g, and τ
f
in Equation (14.34)
can be computed along q
r
(t) and
˙
q
r
(t).
The spectrum analysis technique identifies an FRF of the plant dynamics P
i
( j ω) = q
i
( j ω)/u
i
( j ω),
where ω denotes angular frequency. A comprehensive description of techniques for FRF identification is
available in [24]. If computed directly from the measured u
i
(t) and q
i
(t), the obtained FRF may appear
unreliable. We characterize an FRF as unreliable if the coherence function
=
2
nq
qq
nn
(14.37)
is small.
nn
and
qq
denote the autopower spectra of the excitation signal and of the joint response,
respectively, while
nq
is the cross power spectrum between the excitation and the response. becomes
small if the excitation and response data are correlated, which is usual if these data are measured in closed-
loop. If this is the case, one should carry out indirect, instead of the direct identification of the plant’s
FRF.
In the indirect identification, an FRF of the transfer from n
i
(t)tou
i
(t) is estimated first (n
i
is the ith
element of n in (14.36)). This estimation represents the sensitivity function S
i
( j ω) = [1 + ( jωk
d,i
+
k
p,i
)P
i
( j ω)]
−1
for the feedback loop in the joint i. The coherence of this approach is normally sufficient for
reliable estimation in the frequency range beyond the bandwidth of the closed-loop system in the joint i.
Hence, a low bandwidth for the closed-loop in the joint i is preferable. On the other hand, sufficiently high
bandwidths of the feedback loops in the remaining joints are needed to prevent any motion in these joints.
Therefore, separate sets of controller settings are required. With the identified sensitivity, for a known
setting of the PD gains, one may find the plant’s FRF:
P
i
( j ω) =
1/S
i
( j ω) − 1
jωk
d,i
+ k
p,i
(14.38)
The obtained FRF represents dynamics of the joint i, which are not compensated with the rigid-body
dynamic model, as a set of data. For the control design it is more convenient to represent these dynamics
with some parametric model in a transfer function or state-space form. There are a number of solutions
to fit a parametric model into FRF data [24]. The least-square fit using an output error model structure
model is one possibility [25].
The time-domain technique directly determines a parametric model of the plant dynamics. Here, it is
only sketched for the case of direct identification, which is based on the measured excitation u
i
(t) and
response q
i
(t) data. Extension to indirect identification is straightforward. If collected at discrete time
instants t
1
, t
2
, ..., t
ζ
, the measurement pairs {u
i
(t
1
), q
i
(t
1
)}, {u
i
(t
2
), q
i
(t
2
)}, ..., {u
i
(t
ζ
), q
i
(t
ζ
)}can be used
for identification of the plant dynamics assuming a transfer function model of the form
Q
i
(z)
U
i
(z)
= P
i
(z) =
b
1
z
−1
+ b
2
z
−2
+···+b
n
z
−n
1 −a
1
z
−1
−···−a
n
z
−n
(14.39)
This model, defined in Z-domain, is often referred to as the ARMA (autoregressive moving-average)
model [26]. Provided n <ζ, the least-squares estimates of the model coefficients
ϑ = [a
1
a
2
...a
n
b
1
b
2
...b
n
]
T
(14.40)
Copyright © 2005 by CRC Press LLC
14
-14 Robotics and Automation Handbook
can be determined using the formula
ˆ
ϑ = F
#
Q
i
(14.41)
where # denotes matrix pseudoinverse and
Q
i
=
q
i
(t
n+1
)
q
i
(t
n+2
)
.
.
.
q
i
(t
ζ
)
F =
q
i
(t
n
) q
i
(t
n−1
) ··· q
i
(t
1
) u
i
(t
n
) ··· u
i
(t
1
)
q
i
(t
n+1
) q
i
(t
n
) ··· q
i
(t
2
) u
i
(t
n+1
) ··· u
i
(t
2
)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
q
i
(t
ζ −1
) q
i
(t
ζ −2
) ··· q
i
(t
ζ −n+1
) u
i
(t
ζ −1
) u
i
(t
ζ −2
) u
i
(t
ζ −n+1
)
(14.42)
The determined parametric model of the plant is used for design of a feedback controller. A more
realistic model contributes to higher performance of robot motion control and better robustness against
uncertainty in the manipulator dynamics. Experience shows that robust model-based motion control of
high performance is possible only if all notable peculiarities of the manipulator dynamics are recognized
and taken into account during the feedback control design. This certainly increases the time needed for
system identification, control design, and feedback tuning. However, a benefit from application of the
resulting controller is a robotic system of improved quality.
14.6 Case-Study: Modeling and Identification of a Direct-Drive
Robotic Manipulator
Practical application of the theoretical concepts presented so far will be illustrated for the case of a realistic
robotic manipulator of spatial kinematics and direct-drive actuation.
14.6.1 Experimental Set-Up
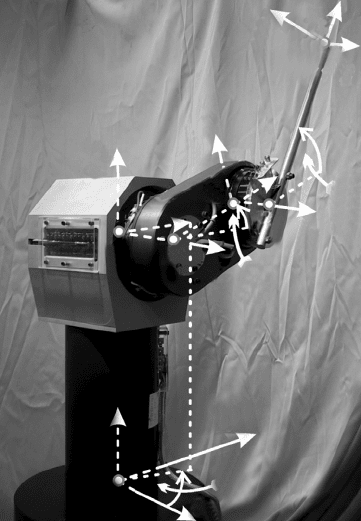
The robotic arm used for experimental identification is shown in Figure 14.5. This experimental facility
is used for research on modeling, identification, and control of robots [27–32]. Its three revolute joints
(n = 3 − RRR kinematics) are actuated by gearless brushless DC direct-drive motors. The joints have
infinite range of motions, because power and sensor signals are transferred via sliprings. The coordinate
frames indicated in Figure 14.5 are assigned according to the DH convention. Numerical values of the DH
parameters are given in Table 14.1. The actuators are Dynaserv DM-series servos with nominal torques
of 60, 30, and 15 Nm. These servos are equipped with incremental optical encoders with a resolution of
∼10
−5
rad. Each actuator is driven by a power amplifier, which ensures a linear proportionality between
the input voltage and the output motor torque. Both encoders and amplifiers are connected to a PC-based
TABLE 14.1 DH Parameters of the RRR
Robot
i α
i
[rad] a
i
[m] q
i
d
i
[m]
1 π/2 0 q
1
C
0
C
1
= 0.560
20P
1
C
2
= 0.200 q
2
C
1
P
1
= 0.169
30P
2
C
3
= 0.415 q
3
C
2
P
2
= 0.090
Copyright © 2005 by CRC Press LLC
Modeling and Identification for Robot Motion Control 14
-15
1
x
1
y
2
y
2
z
2
x
0
y
0
z
0
x
1
z
3
y
3
z
C
3
C
0
C
2
C
1
P
1
P
2
3
x
q
1
q
2
q
3
FIGURE 14.5 The RRR robot.
control system. This system consists of a MultiQ I/O board from Quanser Consulting (8 × 13 bits ADC,
8 ×12 bits DAC, eight digital I/O, six encoder inputs, and three hardware timers), combined with the soft
real-time system Wincon from Quanser Consulting. The control system facilitates online data acquisition
and control directly from Matlab/Simulink.
The rigid-bodydynamics has a dominant role in the overall dynamic behavior of the RRR robot. Friction
in the robot joints can be observed, too. Moreover, several effects not covered by the rigid-body dynamics
with friction can be excited, e.g., vibrations at the robot base and high frequency resonances. These effects
cannot be ignored if a high quality feedback control design is desired.
14.6.2 Kinematic and Dynamic Models in Closed Form
Kinematic and rigid-body dynamic models of the RRR robot were derived following the procedure ex-
plained in subsections 14.2.1 and 14.2.2. The models are available in closed form, which highly facilitates
their analysis and manipulation, as well as a model-based control design.
The elements of the matrix
0
O
3
, which maps orientation of the tip coordinate frame ‘3’ to the base
frame ‘0,’ are as follows:
o
1,1
= cos q
1
cos(q
2
+q
3
), o
1,2
=−cos q
1
sin(q
2
+q
3
), o
1,3
= sin q
1
, o
2,1
= sin q
1
cos(q
2
+q
3
)
o
2,2
=−sin q
1
sin(q
2
+q
3
), o
2,3
=−cos q
1
, o
3,1
= sin(q
2
+q
3
), o
3,2
= cos(q
2
+q
3
), o
3,3
= 0 (14.43)
The orthogonal projections of the vector
0
x
3
(q) pointing from the origin of ‘0’ to the origin of ‘3’ are
x = cos q
1
(a
3
cos(q
2
+q
3
) +a
2
cos q
2
) +(d
2
+ d
3
) sin q
1
y = sin q
1
(a
3
cos(q
2
+q
3
) +a
2
cos q
2
) − (d
2
+ d
3
)cosq
1
z = a
3
sin(q
2
+q
3
) +a
2
sin q
2
+ d
1
(14.44)
Copyright © 2005 by CRC Press LLC