Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

Precision Positioning of Rotary and Linear Systems 13
-19
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
–20
0
20
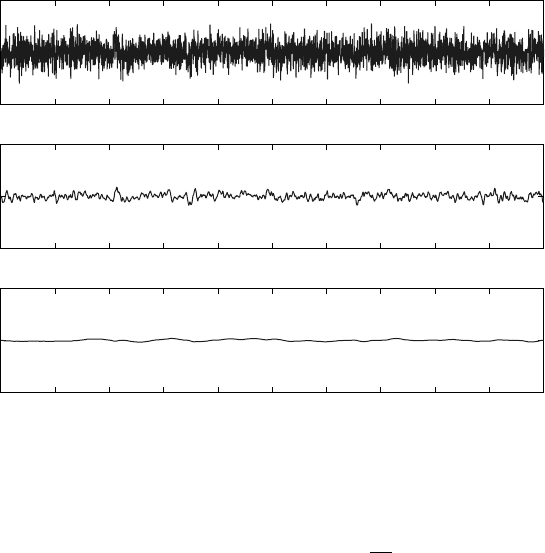
Sensor Noise at 1000 Hz Bandwidth, 3–sigma = 10.0 nm
Position, nm
–20
0
20
Sensor Noise at 100 Hz Bandwidth, 3–sigma = 3.2 nm
Position, nm
–20
0
20
Sensor Noise at 10 Hz Bandwidth, 3–sigma = 1.0 nm
Position, nm
Time, s
FIGURE 13.8 Effect of analog filtering on the resolution of an analog sensor.
controller loop bandwidth. If the noise present in the sensor measurement is essentially random, the sensor
resolution can be expressed as a spectral density and quoted as nm/
√
Hz. The designer can then match the
appropriate filter bandwidth to his resolution requirements. However, a caution here is that many sensors
have inherently higher levels of noise at the lower frequencies. The amount of filtering required to achieve
a resolution may be higher than expected. Analog sensors are usually supplied with signal conditioning
electronics that convert the natural output of the sensor to a standard form (typically ±10 V). These
electronics should be placed as close as possible to the sensor because the low-level signals in the raw
sensor output are often highly susceptible to electronic noise. The conditioned signal is usually somewhat
less sensitive but should still be shielded and routed as far as possible from high-power conductors. Analog
sensor accuracy and linearity is entirely distinct from the resolution specification. Sensors may be highly
linear about an operating point but often become increasingly nonlinear over their full range of travel.
This nonlinearity can be compensated for with a table or curve fit in software. Sensor manufacturers may
also provide a linearized output from their electronics package. This is very useful for metrology, but a
designer should confirm the update rate of this output before using for feedback. Often this additional
output is no longer a native analog signal, but it may have been quantized, corrected, and re-synthesized
through a digital-to-analog converter. All of these processes add time and phase lag to the measurement
making it less suitable for use as a feedback device.
13.3.6 Control Algorithms
The application of control algorithms separates mechatronics systems and mechatronic design from tradi-
tional electromechanical systems. Modern controllers do more than simply close a PID loop. They provide
additional options on feedback filtering and feedforward control, allow for coordination between multiple
axes, and should provide an array of tuning and data collection utilities. An overview of control algorithms
used with precision machines is provided here.
13.3.6.1 System Modeling
Dynamic models of the system should be developed for creating the controller and verifying its per-
formance. Each controller design should begin with a simple rigid-body model of the overall structure.
Copyright © 2005 by CRC Press LLC
13
-20 Robotics and Automation Handbook
Ka Ke 11
Current, AVolts
Control
Effort
Amplifier Gain
(Amps/Volt)
Forcer Gain
(Newtons/Amp)
Damping
(N/(m/s))
Km
Force, N
Accn
m/s
^
2
Mass
(kg)
Encoder Gain
(counts/meter)
Int 1 Int 2
Vel. m/s Position, m
Position
Position, cnts
1/J
±
1
s
1
s
B
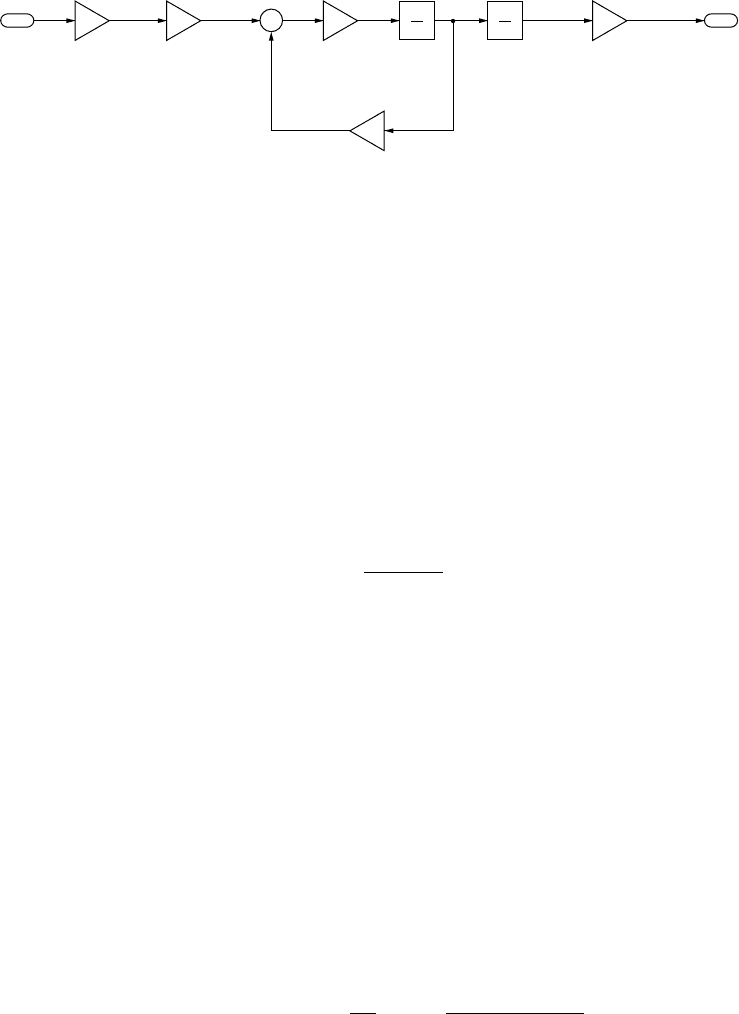
FIGURE 13.9 Simplified plant model used for initial single-axis tuning and motor sizing.
This simplified model is justified when, at a typical closed-loop bandwidth for mechanical systems of 10–
100 Hz, friction is low and any structural resonances are located at significantly higher frequencies. While
not complete, the simplified model shows the bulk rigid-body motion that can be expected given the mass
of the stage, the selection of motors and amplifiers, and the types of commanded moves. It can also be used
to generate a more-accurate estimation of motor currents (and power requirements) for typical machine
moves. Figure 13.9 shows a block diagram of a simplified linear-motor-driven system. The voltage from
the analog output of the controller is converted into current by the amplifiers and into a force by the linear
motors. In this first model, we assume no dynamics in the amplifier and that commutation is implemented
properly to eliminate force ripple. The motor force accelerates the stage mass, and an encoder measures
the resulting stage position. The continuous-time transfer function from control-effort to stage position
(in counts) is therefore
P
(
s
)
=
k
s(ms +b)
(13.19)
and this transfer function can be used to generate controller gains. Scaling factors will always be specific
to the supplier of the control electronics, and it may take some research to find these exactly.
The simplified model is adequate for the initial generation of gain parameters, but determining perfor-
mance at the nanometer level always involves augmenting the model with additional information. This ad-
vanced model should include the discrete-time controller, quantized position feedback and control effort,
higher order dynamics in the amplifier, higher-frequency mechanical modes (obtained either from a finite-
element study or experimentally through a modal analysis), force ripple in the motors, errorin the feedback
device, and frictionand process-forceeffects. Some can be predicted analyticallybefore building the system,
but all should be measured analytically as the parts of the system come together to refine the model.
13.3.6.2 Feedback Compensation
Commercially available controllers generally use some form of classical proportional-integral-derivative
(PID) control as their primary control architecture. This PID controller is usually coupled with one or
more second-order digital filters to allow the user to design notch and low-pass filters for loop-shaping
requirements. In continuous-time notation, the preferred form of the PID compensator is
C
(
s
)
= K
p
1 + T
D
s +
1
T
I
s
= K
p
T
D
T
I
s
2
+ T
I
s + 1
T
I
s
(13.20)
Separating the proportional term by placing it in front of the compensator allows the control engineer to
compensate for the most common system changes (payload, actuator, and sensor resolution) by changing a
single gain term (K
p
). Techniques for designing continuous-time PID loops are well documented in almost
any undergraduate-level feedback controls textbook. The preferred method for designing, analyzing, and
characterizing servo system performance is by measuring loop-transmissions, otherwise known as open-
loop transfer functions. This measure quantitatively expresses the bandwidth of the system in terms of the
crossover frequency and the damping in terms of the phase margin.
Copyright © 2005 by CRC Press LLC

Precision Positioning of Rotary and Linear Systems 13
-21
13.3.6.3 Feedforward Compensation
Feedforward compensation uses a quantitative model of the plant dynamics to prefilter a command to
improve tracking of a reference signal. Feedforward control is typically not studied as often as feedback
control, but it can cause tremendous differences in the ability of a system to follow a position command.
Feedforward control differs from feedback in that feedforward control does not affect system stability. If
a perfect model of the plant were available with precisely known initial conditions, then the feedforward
filter would conceptually consist of an inverse model of the plant. Preshaping the reference signal with
this inverse model before commanding it to the plant will effectively lead to unity gain (prefect tracking)
at all frequencies. If properly tuned, the feedback system is required only to compensate for modeling
inaccuraciesin the feedforwardfilterand to respondto external disturbances. In practicalimplementations,
the plant cannot be exactly invertedoverall frequencies, but the feedforward gain willinsteadboost tracking
ability at low frequencies.
Formal techniques exist for creating feedforward filters for generalized discrete-time plants. Tomizuka
[37] developed the zero phase error tracking controller (ZPETC) that inverts the minimum-phase zeroes
of a plant model and cancels the phase shift of the nonminimum phase components. Nonminimum
phase zeroes are a common occurrence in discrete-time systems. The ZPETC technique begins with a
discrete-time model of the closed-loop system (plant and controller),
G
p
(z
−1
) =
z
−d
B
−
c
(z
−1
)B
+
c
(z
−1
)
A
c
(z
−
1)
(13.21)
in which the numerator is factored in minimum-phase zeros B
+
c
and non-minimum-phase zeros B
−
c
.The
z
−d
term is the d-step delay incurred due to computation time or any phase lag. The ZPETC filter for this
system becomes
G
ZPETC
(z
−1
) =
z
d
A
c
(z
−1
)B
−
c
(z)
B
+
c
(z
−1
)B
−
c
(1)
2
(13.22)
whichcancels the poles and minimum-phase zerosof the system, and cancels the phase of the nonminimum
phase zeros. This is a noncausal filter, but it is made causal with a look ahead from the trajectory generator.
In multi-axis machine, it is generally allowable to delay the position command by a few servo samples
provided the commands to all axes are delayed equally and the motions remain synchronized.
Feedforward control techniques are also available that modify the input command to cancel trajectory-
induced vibrations. One such technique, trademarked under the name Input Shaping was developed by
Singer and Seering [31] at MIT. Input Shaping,
TM
and related techniques, convolve the input trajectory
with a series of carefully timed and scaled impulses. These impulses are timed to be spaced by a half-period
of the unwanted oscillation and are scaled so that the oscillation produced by the first impulse is cancelled
by the second impulse. Much of the research work in this area has involved making the filter robust to
changes in the oscillation frequency. The downside to this technique, in very general terms, is that the time
allowed for the rigid-body move must be lengthened by one-half period of the oscillation to be cancelled.
Specialized feedforward techniques can be applied when the commanded move is cyclic and repetitive.
In this case, the move command can be expressed as a Fourier series and decomposed into a summation
of sinusoidal components [19]. The steady-state response of a linear system to a sinusoid is well defined as
a magnitude and phase shift of the input signal, and so each sinusoidal component of the command can
be pre-shifted by the required amount such that the actual movement matches the required trajectory.
13.4 Conclusions
Precision positioning of rotary and linear systems requires a mechatronic approach to the overall system
design. The philosophy of determinism in machine design holds that the performance of the system
can be predicted using familiar engineering principles. In this chapter, we have presented some of the
components that enter into a deterministic precision machine design. Concepts such as alignment errors,
Copyright © 2005 by CRC Press LLC
13
-22 Robotics and Automation Handbook
forceand metrology loops, and kinematic constraint guide the designof repeatable and analytic mechanics.
Often-neglected elements in the mechanical design are the cable management system, heat transfer and
thermal management, environmental protection (protecting system from the environment it operates
in and vice-versa), and inevitable serviceability and maintance. Mechatronic systems require precision
mechanics; high-quality sensors, actuators, and amplifiers; and a supervisory controller. This controller
is usually implemented with a microprocessor, and the discrete-time effects of sampling, aliasing, and
quantization must be accounted for by the system design engineer. Finally, the feedback control algorithms
must be defined, implemented, and tested. The elements used to create precision mechatronic systems are
widely available, and it is left to the designer to choose among them trading complexity and cost between
mechanics, electronics, and software.
References
[1] The American Society for Precision Engineering, P.O. Box 10826, Raleigh, NC 27605-0826 USA.
[2] Auslander, D.M. and Kempf, C.J. Mechatronics: Mechanical System Interfacing. Prentice Hall, Upper
Saddle River, NJ, 1996.
[3] Blanding, D.L. Exact Constraint: Machine Design Using Kinematic Principles. American Society of
Mechanical Engineers, New York, NY, 1999.
[4] Bryan, J.B. The deterministic approach in metrology and manufacturing.In: Proceedings of the ASME
1993 International Forum on Dimensional Tolerancing and Metrology, Dearborn, MI, Jun 17–19
1993.
[5] Carbone, P. and Petri, D. Effect of additive dither on the resolution of ideal quantizers. IEEE Trans.
Instrum. Meas., 43(3):389–396, Jun 1994.
[6] DeBra, D.D. Vibration isolation of precision machine tools and instruments. Ann. CIRP, 41(2):711–
718, 1992.
[7] Donaldson, R.R. and Patterson, S.R. Design and construction of a large, vertical axis diamond
turning machine. Proc. SPIE – Int. Soc. Opt. Eng., 433:62–67, 1983.
[8] Edlen, B. The dispersion of standard air. J. Opt. Soc. Am., 43(5):339–344, 1953.
[9] Evans, C. Precision Engineering: An Evolutionary View. Cranfield Press, Bedford, UK, 1989.
[10] Evans, C.J., Hocken, R.J., and Estler, W.T. Self-calibration: reversal, redundancy, error separation,
and “absolute testing.” CIRP Ann., 45(2):617–634, 1996.
[11] Franklin, G.F., Powell, J.D., and Workman, M.W. Digital Control of Dynamic Systems, 3rd ed.,
Addison-Wesley, Reading, MA, 1998.
[12] Fuller, C.R., Elliot, S.J., and Nelson, P.A. Active Control of Vibration. Academic Press, London, 1996.
[13] Gordon, C.G. Generic criteria for vibration-sensitive equipment. In: Vibration Control in Microelec-
tronics, Optics, and Metrology. Proc. SPIE, 1619:71–85, 1991.
[14] Hale, L.C. Friction-based design of kinematic couplings. In: Proceedings of the 13th Annual Meeting
of the American Society for Precision Engineering, St. Louis, MO, 18, 45–48, 1998.
[15] Hale, L.C. Principles and Techniques for Designing Precision Machines. Ph.D. Thesis, MIT, Cambridge,
1999.
[16] Jones, D.I.G. Handbook of Viscoelastic Vibration Damping. John Wiley & Sons, New York, 2001.
[17] Kiong, T.K., Heng, L.T., Huifang, D., and Sunan, H. Precision Motion Control: Design and Imple-
mentation. Springer-Verlag, Heidelberg, 2001.
[18] Kurfess, T.R. and Jenkins, H.E. Ultra-high precision control. In: William S. Levine, editor, The
Control Handbook, 1386–1404. CRC Press and IEEE Press, Boca Raton, FL, 1996.
[19] Ludwick, S.J. A Rotary Fast Tool Servo for Diamond Turning of Asymmetric Optics. Ph.D. Thesis, MIT,
Cambridge, 1999.
[20] Marsh, E.R. and Slocum, A.H. An integrated approach to structural damping. Precision Eng.,
18(2/3):103–109, 1996.
[21] Nayfeh, S.A. Design and Application of Damped Machine Elements. Ph.D. Thesis, MIT, Cambridge,
1998.
Copyright © 2005 by CRC Press LLC
Precision Positioning of Rotary and Linear Systems 13
-23
[22] Oppenheim, A.V. and Shafer, R.W. Discrete Time Signal Processing. Prentice Hall, Englewood Cliffs,
NJ, 1989.
[23] Oppenheim, A.V., Willsky, A.S., and Young, I.T. Signals and Systems. Prentice Hall, Englewood Cliffs,
NJ, 1983.
[24] A
◦
strom K.J. and Wittenmark, B. Computer Controlled Systems: Theory and Design, 3rd ed., Prentice
Hall, 1996.
[25] Riven, E.I. Vibration isolation of precision equipment. Precision Engineering, 17(1):41–56, 1995.
[26] Riven, E.I. Stiffness and Damping in Mechanical Design. Marcel Dekker, New York, 1999.
[27] Riven, E.I. Passive Vibration Isolation. ASME Press, New York, 2003.
[28] Schmiechen, P. and Slocum, A. Analysis of kinematic systems: a generalized approach. Precision
Engineering, 19(1):11–18, 1996.
[29] Schouten, C.H., Rosielle, P.C.J.N., and Schellekens, P.H.J. Design of a kinematic coupling for preci-
sion applications. Precision Engineering, 20(1):46–52, 1997.
[30] Shigley, J.E. and Mischke, C.R. Standard Handbook of Machine Design. McGraw-Hill, New York,
1986.
[31] Singer, N.C. and Seering, W.P. Preshaping command inputs to reduce system vibration. J. Dynamic
Syst., Meas., Control, 112:76–82, March 1990.
[32] Slocum, A.H. Kinematic couplings for precision fixturing — part 1: Formulation of design param-
eters. Precision Engineering, 10(2), Apr 1988.
[33] Slocum, A.H. Kinematic couplings for precision fixturing — part 2: Experimental determination of
repeatability and stiffness. Precision Engineering, 10(3), Jul 1988.
[34] Slocum, A.H. Precision Machine Design. Prentice Hall, Englewood Cliffs, NJ, 1992.
[35] Smith,S.T. and Chetwynd, D.G.FoundationsofUltraprecision MechanismDesign. GordonandBreach
Science Publishers, Amsterdam, the Netherlands, 1992.
[36] Stone, J., Phillips, S.D., and Mandolfo, G.A. Corrections for wavelength variations in precision
interferometric displacement measurements. J. Res. Natl. Inst. Stand. Technol., 101(5):671–674,
1996.
[37] Tomizuka, M. Zero phase error tracking algorithm for digital control. ASME J. Dynamic Sys., Meas.,
Control, 109:65–68, 1987.
[38] Wirsching, P.H., Paez, T.L., and Ortiz, K. Random Vibrations: Theory and Practice. John Wiley &
Sons, New York, 1995.
Copyright © 2005 by CRC Press LLC

14
Modeling and
Identification for
Robot Motion Control
Dragan Kosti
´
c
Technische Universiteit Eindhoven
Bram de Jager
Technische Universiteit Eindhoven
Maarten Steinbuch
Technische Universiteit Eindhoven
14.1 Introduction
14.2 Robot Modeling for Motion Control
Kinematic Modeling
•
Modeling of Rigid-Body Dynamics
•
Friction Modeling
14.3 Estimation of Model Parameters
Estimation of Friction Parameters
•
Estimation of BPS
Elements
•
Design of Exciting Trajectory
•
Online
Reconstruction of Joint Motions, Speeds, and Accelerations
14.4 Model Validation
14.5 Identification of Dynamics Not Covered with a
Rigid-Body Dynamic Model
14.6 Case-Study: Modeling and Identification of a
Direct-Drive Robotic Manipulator
Experimental Set-Up
•
Kinematic and Dynamic Models in
Closed Form
•
Establishing Correctness of the Models
•
Friction Modeling and Estimation
•
Estimation of the BPS
•
Dynamics Not Covered with the Rigid-Body Dynamic Model
14.7 Conclusions
14.1 Introduction
Accurate and fast motions of robot manipulators can be realized via model-based motion control schemes.
These schemes employ models of robot kinematics and dynamics. This chapter discusses all the necessary
steps a control engineer must take to enable high-performance model-based motion control. These steps
are (i) kinematic and rigid-body dynamic modeling of the robot, (ii) obtaining model parameters via
direct measurements and/or identification, (iii) establishing the correctness of the models and validating
the estimated parameters, and (iv) deducing to what extent the rigid-body model covers the real robot
dynamics and, if needed for high-performance control, the identification of the dynamics not covered by
the derived model. Better quality achieved in each of these steps contributes to higher performance of
motion control.
The robotics literature offers various tutorials on kinematic and dynamic modeling [1–4]. A number
of modeling methods are available, meeting various requirements. As for robot kinematics, the model is a
mapping between the task space and the joint space. The task space is the space of the robot-tip coordinates:
Copyright © 2005 by CRC Press LLC
14
-2 Robotics and Automation Handbook
end-effector’s Cartesian coordinates and angles defining orientation of the end-effector. The joint space
is the space of joint coordinates: angles for revolute joints and linear displacements for prismatic joints.
A robot configuration is defined in the joint space. The mapping from the joint to the task space is called
the forward kinematics (FK). The opposite mapping is the inverse kinematics (IK). The latter mapping
reveals singular configurations that must be avoided during manipulator motions. Both FK and IK can be
represented as recursive or closed-form algebraic models. The algebraic closed-form representation facili-
tates the manipulation of a model, enabling its straightforward mathematical analysis. As high accuracy of
computation can be achieved faster with the closed-form models, they are preferable for real-time control.
A dynamic model relates joint motions, speeds, and accelerations with applied control inputs: forces/
torques or currents/voltages. Additionally, it gives insight how particular dynamic effects, e.g., nonlinear
inertial and Coriolis/centripetal couplings, as well as gravity and friction effects, contribute to the overall
robot dynamic behaviour. A variety of methods are available for derivation of a dynamic model, which ad-
mits various forms of representation. Algebraic recursive models require less computational effort than the
corresponding algebraic closed-form representations. Recursive models have compact structure, requiring
low storage resources. Computational efficiency and low storage requirements are traditional arguments
recommending the online use of recursive models [3]. However, the power of modern digital computers
makes such arguments less relevant, as online use of models in closed-form is also possible. Furthermore,
an algebraic closed-form representation simplifies manipulation of a model, enabling an explicit analysis of
each dynamic effect. Direct insight into the model structure leads to more straightforward control design,
as compensation for each particular effect is facilitated. For example, a closed-form model of gravity can
be used in the compensation of gravitational loads.
Unfortunately, the derivation of closed-form models in compact form, in particular IK and dynamic
models, is usually not easy, even if software for symbolic computation is used. The derivation demands a
series of operations, with permanent combining of intermediate results to enhance compactness of the final
model. To simplify derivation, a control designer sometimes approximates robot kinematic and/or inertial
properties. For example, by neglectinglink offsets accordingto Denavits-Hartenberg’s (DH) notation [1,3],
a designer deliberately disregards dynamic terms related with these offsets, thus creating a less involved but
incomplete dynamic model. An approach to model manipulator links as slender beams can approximate
robot inertial properties, since some link inertia or products of inertias may not be taken into account.
Consequently, the resulting model is just an approximation of the real dynamic behavior. It is well-known
that with transmissions between joint actuators and links, nonlinear coupling and gravity effects can
become small [1–3]. If reduction ratios are high enough, these effects can become strongly reduced and
thus ignoredin a dynamic model. If robot joints are not equippedwithgearboxes, which is characteristic for
direct-drive robots [5], then the dynamic couplings and the gravity have critical influence on the quality
of motion control, and they must be compensated via control action. More accurate models of these
effects contribute to more effective compensation. Additional methods to simplify dynamic modeling
are neglecting friction effects or using conservative models for friction, e.g., adopting just viscous and
ignoring Coulomb effects. The approximate dynamic modeling is not preferable for high-performance
motion control, as simplified models can compensate just for a limited number of actual dynamic effects.
The noncompensated effects have to be handled by stabilizing feedback control action. The feedback
control design is more involved if more dynamic effects are not compensated with the model.
Obviously, when a model is derived, it is useful to establish its correctness. Comparing it with some
recursive representation of the same kinematics or dynamics is a straightforward procedure with available
software packages. For example, software routines specialized for robotic problems are presented in [6,7].
With a model available, the next step is to estimate the model parameters. Kinematic parameters are
often known with a sufficient accuracy, as they can be obtained by direct measurements and additional
kinematic calibration [8]. In this chapter, emphasis will be on estimating the parameters of a robot dynamic
model, i.e., the inertial and friction parameters. The estimation of these parameters is facilitated if a model
of robot dynamics is represented in so-called regressor form, i.e., linearly in the parameters to be estimated.
The estimation itself is a process that requires identification experiments performed directly on a robot.
To establish experimental conditions allowing for the simplest and the most time-efficient least-squares
Copyright © 2005 by CRC Press LLC
Modeling and Identification for Robot Motion Control 14
-3
(LS) estimation of the parameters, joint motions, speeds, and accelerations can be reconstructed via an
observer [9,10]. Care should be takenwhen designingrobot trajectories to be realized duringidentification.
Guidelines for their design are highlighted in [11,12].
Afterthe estimation is finished, experimentalvalidation of the model has to be done. Its objective is to test
how accurately the model represents actual robot dynamics. If the accuracy is satisfactory, the usefulness of
the model for model-based control purposes is established. For validation purposes, a manipulator should
execute motions similar to those it is supposed to perform in practice. In the task space, these are the
sequences of straight-line and curved movements. Hence, a writing task defined in the task space might
be used as a representative validation trajectory. The choice of such a task is intuitive because of at least
two reasons: writing letters is, indeed, a concatenation of straight-line and curved primitives, similar to
common robot movements, and such a task may strongly excite the robot dynamics due to abrupt changes
in accelerations and nonuniform speed levels. An example of a writing task applicable for model validation
can be found in [13].
A dynamic model can be further used in model-based control algorithms. The model contributes to the
performance of the applied control algorithms to the extent that it matches the real robot dynamics. In
practice, the rigid-body models may cover the real dynamics only within the low-frequency range, as the
real dynamics feature flexible effects at higher frequencies. These effects are caused by elasticity in joints
and by distributed link flexibilities. For high-performance motion control, the influence of flexibilities
cannot be disregarded. Here we present a technique for the identification and modeling of these effects.
The rest of the chapter is organized as follows. In Section 14.2, kinematic and rigid-body dynamic
models will be derived for a general robot manipulator. A regressor form of a dynamic model will be
introduced, and a set of often used friction models will be presented. An estimation of robot inertial and
friction parameters will be explained in Section 14.3. A way to validate a dynamic model, suitable for
motion control purposes, will be presented in Section 14.4. Identification and modeling of the dynamics
not covered by a rigid-body model will be discussed in Section 14.5. Section 14.6 is a case-study. It
demonstrates modeling and identification strategy for a realistic direct-drive manipulator. Conclusions
will come at the end.
14.2 Robot Modeling for Motion Control
14.2.1 Kinematic Modeling
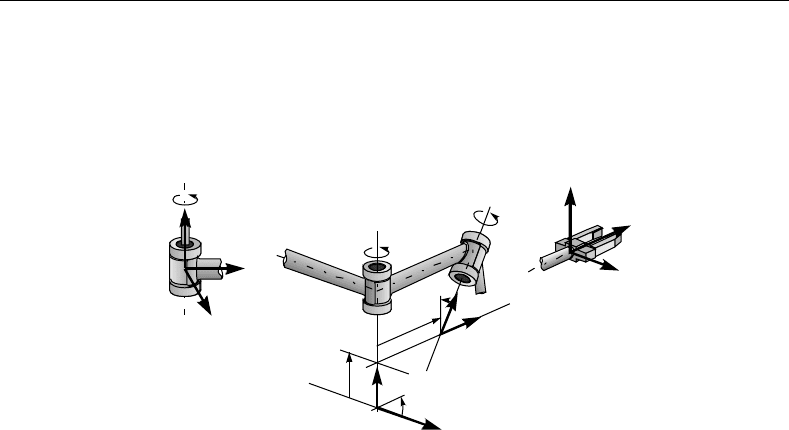
Consider a serial robot manipulator with n-joints, shown in Figure 14.1. A minimal kinematic parameter-
isation for this manipulator can be established according to the well-known DH (Denavits-Hartenberg)
convention [1,3]. This convention systematically assigns coordinate frames to the robot joints and induces
the following DH parameters: twist angles α
i
, link lengths a
i
, joint displacements q
i
, and link offsets d
i
,
a
i
q
i
q
0
q
i
q
i
+1
0
x
d
i
α
i
0
y
0
z
i
−1
x
i
−1
z
i
x
n
y
i
z
n
z
n
x
‘0’
‘
i
’
‘
i
−1’
‘
n
’
FIGURE 14.1 A general serial manipulator with n joints.
Copyright © 2005 by CRC Press LLC
14
-4 Robotics and Automation Handbook
where i = 1, ..., n. The position and orientation of the ith coordinate frame with respect to the previous
one (i − 1) can be specified by the homogenous transformation matrix:
i−1
T
i
(q) =
i−1
O
i
(q)
i−1
x
i
(q)
0
1×3
1
(14.1)
Here, q is the vector of generalized coordinates:
q = [q
1
q
2
... q
n
]
T
(14.2)
The coordinates are linear and angular displacements of prismatic and revolute joints, respectively. The
skew-symmetric rotation matrix
i−1
O
i
∈ IR
3×3
defines the orientation of the ith frame with respect to
frame i − 1:
i−1
O
i
(q) =
cos q
i
−cos α
i
sin q
i
sin α
i
sin q
i
sin q
i
cos α
i
cos q
i
−sin α
i
cos q
i
0 sin α
i
cos α
i
(14.3)
The position vector
i−1
x
i
∈ IR
3×1
points from the origin of the frame i − 1 to the ith frame:
(
i−1
x
i
(q))
T
= [
a
i
cos q
i
a
i
sin q
i
d
i
] (14.4)
The forward kinematics (FK) can be computed as a product of homogeneous transformations between
the circumjacent coordinate frames:
0
T
n
(q) =
0
T
1
(q)
1
T
2
(q) ...
n−1
T
n
(q) =
0
O
n
(q)
0
x
n
(q)
0
1×3
1
(14.5)
The orientation and position of the tip coordinate frame n with respect to the base (inertial) frame 0 are
determined by
0
O
n
and
0
x
n
, respectively. In general case, both
0
O
n
and
0
x
n
nonlinearly depend on the
generalized coordinates, and thus it is not always possible to explicitly express q in terms of the tip position
and orientation coordinates. Consequently, there is no general closed-form representation of the inverse
kinematics (IK), and numerical techniques are often used to solve IK [1].
14.2.2 Modeling of Rigid-Body Dynamics
The rigid-body model of the robot dynamics can be derived using the Euler-Lagrange formulation [1–3].
The standard form of the model is as follows:
M(q(t))
¨
q(t) + c(q(t),
˙
q(t)) + g(q(t)) +τ
f
(t) = τ (t) (14.6)
where q is defined by Equation (14.2),
˙
q and
¨
q are vectors of the joint speeds and accelerations, respectively,
M is the inertia matrix, c, g, and τ
f
are the vectorsof Coriolis/centripetal, gravitational, and friction effects,
respectively, and τ is the vector of joint control inputs (forces/torques). Elements of M, c, and g can be
determined using the homogenous transformation (14.1):
m
i,k
=
n
j=max(i,k)
Tr
∂
0
T
j
∂q
k
J
j
∂
0
T
j
∂q
i
T
, c
i
=
n
k=1
n
l=1
c
i,k,l
˙
q
k
˙
q
l
c
i,k,l
=
n
j=max(i,k,l)
Tr
∂
20
T
j
∂q
k
∂q
l
J
j
∂
0
T
j
∂q
i
T
g
i
=
n
j=i
−m
j
[0 0 − g 0]
∂
0
T
j
∂q
i
i
r
j
, i, k, l = 1, ..., n (14.7)
Copyright © 2005 by CRC Press LLC

Modeling and Identification for Robot Motion Control 14
-5
Here, m
j
is the mass of the jth link, g is acceleration due to gravity,
i
r
j
contains the homogenous
coordinates of the center of mass of link j expressed in the ith coordinate frame
i
r
j
= [x
j
y
j
z
j
1]
T
(14.8)
while J
j
is the inertia tensor with elements:
j
j,11
=
−I
xx,j
+ I
yy,j
+ I
zz, j
2
; j
j,22
=
I
xx,j
− I
yy,j
+ I
zz, j
2
; j
j,33
=
I
xx,j
+ I
yy,j
− I
zz, j
2
j
j,12
= j
j,21
= I
xy,j
; j
j,13
= j
j,31
= I
xz, j
; j
j,23
= j
j,32
= I
yz, j
; j
j,14
= j
j,41
= m
j
x
j
j
j,24
= j
j,42
= m
j
y
j
; j
j,34
= j
j,43
= m
j
z
j
; j
j,44
= j
j,44
= m
j
(14.9)
I
xx,j
, I
yy,j
, and I
zz, j
denote principal moments of inertia for the link j, and I
xy,j
, I
yz, j
, and I
xz, j
are
products of inertia of the same link.
The dynamic model (14.6), excluding friction, can be represented linearly in elements of the so-called
base parameter set (BPS). These elements are combinations of the inertial parameters used in the equations
above, and they constitute the minimum set of parameters whose values can determine the dynamic model
uniquely [1,11,12,14]. A linear parameterization of the rigid-body dynamic model (14.6) has the form:
R(q(t),
˙
q(t),
¨
q(t))p + τ
f
(t) = τ (t)
(14.10)
where R ∈ IR
n×p
is the regression matrix and p ∈ IR
p×1
is the vector of the BPS elements. The regressor
form of the dynamic model is suitable for the estimation of inertial parameters.
14.2.3 Friction Modeling
The dynamic models (14.6) and (14.10) also feature the friction term τ
f
. In the real system, friction cannot
be disregarded if high-performance motion control is required. Hence, modeling and compensation of
friction effects are important issues in robot motion control. A basic friction model covers just Coulomb
and viscous effects:
α
1,i
sgn
˙
q
i
+ α
2,i
˙
q
i
= τ
f
i
(i = 1, ..., n) (14.11)
where τ
f
i
is the ith element of τ
f
, while α
1,i
and α
2,i
are Coulomb and viscous friction parameters,
respectively. This model admits a linear representation in the parameters α
1,i
and α
2,i
. This enables a
joined regressor form of the dynamic model (14.10), where the new regression matrix is formed by vertical
stacking R and the rows containing friction terms, while the parameter vector consists of p and friction
parameters. The joined regressor form allows simultaneous estimation of the BPS and friction parameters
[11,12].
However, frictionis a verycomplexinteraction between thecontactsurfacesofthe interacting objects and
needs a comprehensive model to be described correctly [15–19]. Presliding and sliding are two commonly
recognized friction regimes [15,16]. The level of friction prior to the sliding regime is called the static
friction, or the stiction. At the beginning of the sliding regime, the decreasing friction force for increasing
speed is known as the Stribeck effect. Beyond this stage, the frictionforceincreases as the speed is increasing,
which is caused by the viscous effect. A time lag between the speed and friction force can be detected,
which implies a dynamic, rather than just static nature of the friction. Several static and dynamic models
were proposed to represent the given properties of friction.
A frequently used static friction model has the form:
γ (
˙
q
i
)sgn
˙
q
i
+ α
2,i
˙
q
i
= τ
f
i
γ
i
(
˙
q
i
) = α
0,i
exp[−(
˙
q
i
/v
s,i
)
2
] +α
1,i
(i = 1, ..., n) (14.12)
where γ (
˙
q
i
) is the Stribeck curve for steady-state speeds, v
s,i
is the Stribeck velocity, and α
0,i
, α
1,i
, and α
2,i
are static, Coulomb, and viscous friction parameters, respectively. The given model describes the sliding
Copyright © 2005 by CRC Press LLC