Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.


12
-8 Robotics and Automation Handbook
B
I
V
H
FIGURE 12.9 Hall effect sensor.
12.2.1.7 Ultrasonic Sensors
Ultrasonic displacement sensors use the same approach as optical time-of-flight sensors with an analog
output proportional to the distance to target. Instead of a light pulse, however, an ultrasonic pulse is
generated, reflected from a target, and then detected by a receiver. The response is dependent upon the
density of the target. The frequency of the ultrasonic pulse is greater than 20 kHz and thus beyond
the audible range for humans. Piezoelectric and electrostatic transducers are typically used to generate
the ultrasonic pulse.
Ascomparedwithoptical time-of-flight sensors, ultrasonic sensorsareless sensitivetolight disturbances.
However, ultrasonic sensor output can be affected by large temperature gradients because the speed of
sound is affected by air temperature.
12.2.1.8 Hall Effect Sensors
Hall effect sensors are noncontact sensors which output a signal proportional to input magnetic field
strength.The Halleffectreferstothevoltagegenerated when acurrentcarryingconductoror semiconductor
is exposed to magnetic flux in a direction perpendicular to the direction of the current. A voltage, the Hall
voltage, is generated in a direction perpendicular to both the current, I, and the applied magnetic field, B,
as shown in Figure 12.9. In order to use a Hall effect sensor as a displacement sensor, the sensor is typically
matched with a moving permanent magnet. This magnet is applied to the target.
Since the output of the Hall effect sensor is directly proportional to the applied magnetic field strength,
the output will be nonlinearly related to the distance from the sensor to the permanent magnet. This
nonlinear relationship must be included in the post processing of the output signal. The sensor is most
often made of a semiconductor material and therefore is available in standard integrated circuit packages
with integrated electronics.
12.2.2 Strain
The most common strain sensor used in robotics is the strain gage. The electrical resistance of this sensor
changes as a function of the input strain. The input strain may be either positive (tensile) or negative
(compressive). An example of a bonded metallic strain gage is shown in Figure 12.10. The sensor consists
of an insulating carrier, a foil or wire grid bonded to the insulating carrier, and an additional insulating
layer applied to the top of the grid. The sensor is bonded a structure such that the grid legs are aligned
with the desired direction of strain measurement. The design of the grid makes it most sensitive to strain
along its length. The change in resistance of the gage is a function of the gage factor, G
L
, multiplied by the
strain
R
R
= G
L
ε
L
where R/R is the relative resistance change, G
L
is the gage factor along the sensor length, and ε
L
is the
strain along the sensor length. The gage factor for the strain gage is provided by the manufacturer.
Copyright © 2005 by CRC Press LLC

Sensors and Actuators 12
-
9
strain gage
structure
metallic grid
FIGURE 12.10 Strain gage sensor applied to structure.
A Wheatstone bridge circuit is used to measure the resistance change of the sensor. Strain gages are
available with nominal resistance values between 30 and 3000 . Temperature variation is the primary
environmental concern for strain gages. Strain gage manufacturers have developed grid materials which
can compensate for the thermal expansion of the test structure. Temperature compensation may also be
achieved through the use of an additional strain gage applied in a direction normal to the measuring gage.
This additional gage is then used as one of the legs in the Wheatstone bridge circuit for comparison.
12.2.3 Force and Torque
Force and torque sensors typically employ an elastic structural element with deflection proportional to the
applied force or torque. Either strain gages or piezoelectric materials are used to measure the deflection
of the elastic structure. Designs based on strain gages are useful for measuring static and low frequency
forces and torques.
Piezoelectric materials develop an electrostatic charge when a mechanical load is applied. This charge is
collected by electrodes and is converted to an output voltage signal through the use of a charge amplifier.
Piezoelectric sensors are useful for dynamic measurements, but due to charge leakage across the electrodes,
these sensors cannot measure static deflection.
Force sensors are frequently termed “load cells.” Different load cell designs are capable of measuring
compressive, tensile, or shear forces. With both force and torque sensors, the natural frequency of the
elastic structure used in the sensor must be taken into consideration for the measurement.
12.2.4 Acceleration
Acceleration sensors are based on the measurement of the deflection of a proof mass suspended in the
sensor housing. There are many types of accelerometers available for use in robotics. The various designs
include piezoelectric, strain gage, piezoresistive, capacitive, and inductive technologies.
Figure 12.11 shows two simplified examples of two accelerometer designs. The first is that of a com-
pressive piezoelectric design. The proof mass is suspended within the sensor housing using piezoelectric
material. The output charge from the piezoelectric material, most often a PZT crystal, is proportional to
the inertial force acting on the proof mass.
proof mass
proof mass
strain gage
PZT crystal
aa
FIGURE 12.11 Piezoelectric and strain gage accelerometer designs.
Copyright © 2005 by CRC Press LLC
12
-10 Robotics and Automation Handbook
The second designshown in Figure12.11 isthe basis for a straingage accelerometerdesign. A cantilevered
beam suspends the proof mass within the sensor housing. Strain gages are applied to the cantilevered beam
and measure the deflection of the beam. MEMS accelerometers have found wide use in the automotive
market and are suitable for many robotics applications. The most common designs in this category are
based on capacitive displacement sensing.
The sensitivity, usable frequency range, and maximum input acceleration are limited by the mechanical
dynamics of the accelerometer. For example, if the suspension is designed to be very compliant, the
sensitivity of the accelerometer will increase with respect to input acceleration. However, the natural
frequency of the suspension will be decreased and this will lead to a decreased frequency range for the
measurement.
12.3 Digital Sensors
A digital sensor will output either an “on” or an “off” electrical state. Apart from encoders, the majority
of digital sensors used in robotic applications are static digital sensors in that their value is solely based on
the digital state of the output as opposed to the frequency of an output pulse train. Static digital sensors
do not require counter electronics for acquisition.
12.3.1 Switches as Digital Sensors
A mechanical switch is the simplest and lowest cost type of digital sensor used in robotics. Switches may be
purchased with “normally open” (NO) or “normally closed” (NC) contacts. The word “normally” refers
to the inactive state of the switch. They also may be available with both options and can be wired in one
configuration or the other. When a switch is configured as normally open, it will have zero continuity
(or infinite resistance) when it is not activated. Activating the switch provides electrical continuity (zero
resistance) between the contacts. Normally closed switches have continuity when they are not activated
and zero continuity when they are activated.
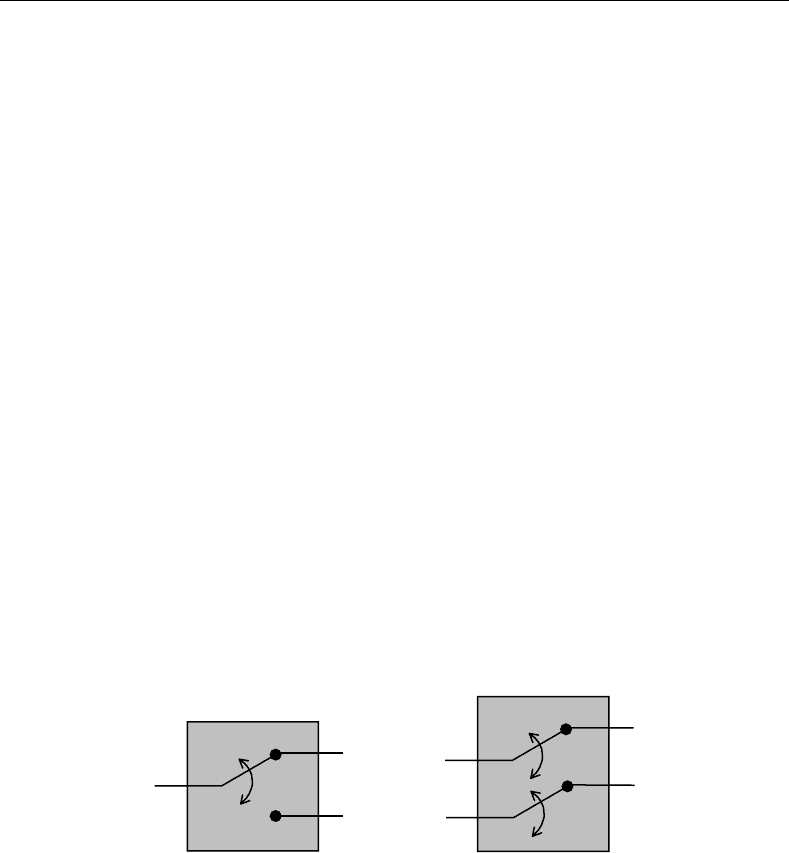
Switches may also be designed to have multiple poles (P) and multiple throws (T) at each pole. A pole
is a moving part of the switch and a throw is a potential contact position for the pole. Figure 12.12 shows
an example of a single pole double throw switch (SPDT) and a double pole single throw (DPST) switch.
Because mechanical switches are contact sensors, they can exhibit failures due to cyclical wear. In addition,
the acquisition electronics used with switches must be able to filter out electrical noise at switch transitions
due to contact bounce.
12.3.2 Noncontact Digital Sensors
In order to reduce problems of contact wear and switch bounce, noncontact digital sensors are frequently
used in robotics. Digitalsensor technology includes the transductiontechnologies discussed in the previous
section on analog sensors:
SPDT DPST
FIGURE 12.12 Single pole double throw (SPDT) and double pole single throw (DPST) switches.
Copyright © 2005 by CRC Press LLC
Sensors and Actuators 12
-
11
Excitation
Common
Sensor
Circuit
E
B
C
Output
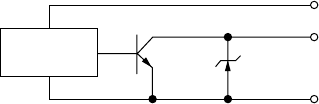
FIGURE 12.13 Digital sensor with NPN open collector output.
r
Inductive
r
Capacitive
r
Optical
r
Hall effect
An analog sensor design can be converted to a digital sensor design through the use of additional
electronic circuitry. A comparator or Schmitt trigger circuit is frequently used to compare the output of
the sensor amplifier with a predetermined reference. The Schmitt trigger will activate when the amplifier
output is greater than the reference. If the amplifier output is less than the reference, then the Schmitt
trigger will turn off.
12.3.3 Solid State Output
Digital sensors frequently use transistors as the output driver technology. These sensors are classified as
having NPN or PNP outputs depending upon the type of transistor used for the output stage. Figure 12.13
shows a sensor with NPN open collector output. The base of the transistor is connected to the sensor
circuit, the emitter to common, and the collector to the output. Since the output is not yet connected to
any other signal, the NPN sensor has an “open collector” output. In the active state, the transistor will
drive the output to common. In the inactive state, the transistor will leave the output floating. Typically,
the output is connected to a data acquisition circuit with a pull-up resistor to a known voltage. In this
way, the inactive state of the sensor will register at the known voltage and the active state will register as
common or ground.
In the case of a PNP sensor, the base of the transistor is still connected to the sensor circuit, the collector
is tied to the DC excitation source for the sensor, and the emitter is used as the output. In this case, the PNP
sensor has an “open emitter” output. When active, the sensor output switches from floating to a positive
voltage value. When inactive, the sensor output is left floating. In the inactive case, a pull-down resistor in
the acquisition circuitry will bring the output to common or ground.
Any type of digital sensor can be classified as having a sinking or a sourcing output. A sinking output
sensor means the sensor can sink current from a load by providing a path to a supply common or ground.
This type of sensor must be wired to a sourcing input in a data acquisition system. A sourcing output
sensor means the sensor can source current to a load by providing a path to a supply source. This type of
sensor must be wired to a sinking input in a data acquisition system. NPN sensors are examples of sinking
output devices while PNP sensors are examples of sourcing output devices. Switches and mechanical relays
may be wired as either sinking or sourcing sensors.
12.3.4 Common Uses for Digital Sensors
Digital sensors can be used in a wide variety of applications within robotics. These include proximity
sensors, limit sensors, and safety sensors such as light curtains.
12.3.4.1 Proximity Sensors
Proximity sensors are similar to analog displacement sensors, but they offer a static digital output as
opposed to an analog output. Proximity sensors are used to determine the presence or absence of an
Copyright © 2005 by CRC Press LLC
12
-12 Robotics and Automation Handbook
object. They may be used as limit sensors, counting devices, or discrete positioning sensors. They are
typically noncontact digital sensors and are based on inductive, capacitive, photoelectric, or Hall effect
technology. These technologies are discussed in the previous section on analog sensors. Their design is
frequently similar to that of analog position sensors but with threshold detecting electronics included so
that their output is digital.
12.3.4.2 Limit Switches and Sensors
Limit switches or limit sensors are digital inputs to a robot controller that signal the end of travel for
motors, actuators, or other mechanisms. The incorporation of limit sensors helps prevent mechanical
failure caused by part of a mechanism hitting a hard stop in the system. The limit sensor itself can be a
physical switch with mechanical contacts or a digital proximity sensor as described above. Limit sensors
may be mounted to individual joints in the robot or to axes of motion in a robotic workcell. When the limit
sensor is encountered for a particular joint or axis, the robot controller will bring the motion to a safe stop.
Both a forward and a reverse limit sensor can be connected to each joint or axis in a robotic system.
Forwardisdefined as the direction of increasing position as measured by the encoder or analog feedback
signal. Limit sensors can be used with both rotational and linear axes. A home switch or sensor can also
be built into each axis and used to indicate a center position reference for the axis.
12.3.4.3 Light Curtains
Light curtains can automatically detect when an operator moves within the danger area for a robot or
robotic operation. This danger area will usually include the entire workspace of the robot. Light curtains
are typically based on photoelectric sensors which emit multiple beams of infrared light. When any of the
beams of light is broken, the control circuit for the light curtain is activated, and the robotic system is
immediately shut down in a safe manner.
12.4 Vision
Many robots use industrial cameras for part detection, inspection and, sometimes, guidance. The camera
output may be analog or digital and may be acquired by a computer through several means. Often, a frame-
grabber or image acquisition plug-in board is used and installed in a computer. More recently, computer
bus technologies such as IEEE 1394, Camera Link
®
, Gigabit Ethernet, and USB have been used to transfer
data between the camera and the computer. Machine vision software is installed on the computer and is
used to examine the image so that image features can be determined and measurements can be made.
Smart camerasincludeembedded processingand machine vision softwareintheir design. Smartcameras
may be one integrated unit or they may use a tethered design with an electronic link between the processor
and the camera.
12.5 Actuators
12.5.1 Electromagnetic Actuators
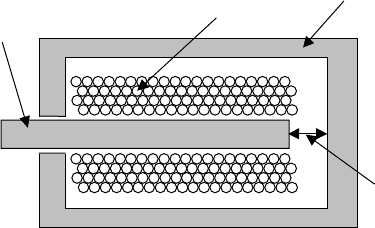
12.5.1.1 Solenoid
Solenoids are the most basic type of electromagnetic actuator. The linear solenoid concept is shown in
Figure 12.14 and consists of a coil of wire, a fixed iron or steel frame, and a movable iron or steel plunger.
The part of the plunger that extends from the frame is attached to the load.
When current flows in the coil, a magnetic field is generated around the coil. The frame serves to
concentrate the magnetic field such that the maximum magnetic force is exerted on the plunger. The
magnetic force causes the plunger to be attracted to the rear of the frame or the back stop and close the
Copyright © 2005 by CRC Press LLC
Sensors and Actuators 12
-
13
frame
coil
plunger
air gap
FIGURE 12.14 Linear solenoid concept.
initial air gap. This force is inversely proportional to the length of the air gap so that the solenoid exerts
greater force as the air gap is closed. In addition, the magnetic force is increased by increasing the applied
current and the number of turns of wire within the coil.
The magnetic field around the coil will only cause motion towards the center of the coil. When no
current flows in the coil, the plunger is free to move to its initial position due to a restoring force caused
by the load and, possibly, a return spring.
The diagram shown in the figure is an example of a pull type solenoid. All solenoids act to pull in the
plunger. However, push type solenoids are designed such that the plunger extends out the rear of the frame
and is then connected to the load. This causes a pushing action on the load when the solenoid is energized.
Solenoids are also specified based on whether they will be used continuously or only for intermittent
duty. Continuous duty assumes that the solenoid will have a 100% duty cycle. Because the coil has limited
heat dissipation, a 100% duty cycle means that the applied current will have to be reduced to prevent
damage to the coil. This, in turn, results in a decreased applied force. Intermittent duty means that the
duty cycle is less than 100%. Intermittent duty allows higher forces than continuous duty because more
current can be applied.
Rotary solenoids are also available and are similar in design to linear solenoids. However, the linear
motion is converted to rotary motion through the use of ball bearings moving down spiral grooves, called
“ball races,” to close the air gap.
12.5.1.2 Stepper Motors
Stepper motors convert input electrical pulses into discrete mechanical motion. They are available in
either rotational or linear designs, but rotational is far more common. For rotary stepper motors, each
step corresponds to a set number of degrees of rotation. The number of electrical pulses determines the
number of steps moved while the timing of the pulses controls the speed of the stepper motor. Because
no feedback sensors are required for their operation, they can be used open-loop and do not require any
tuning. They are well-suited for use in positioning applications and are easy to use.
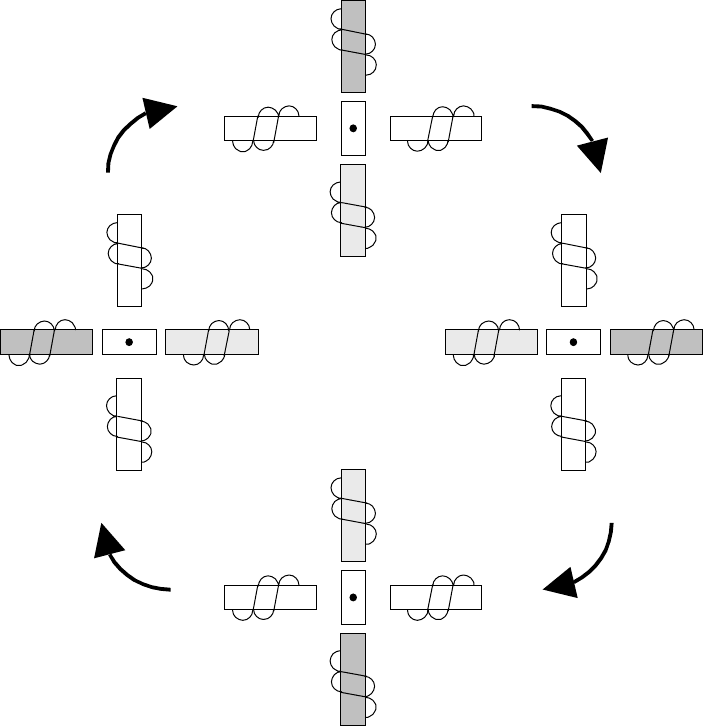
Permanent magnet stepper motors are common and include a stator (stationary part) with windings
and a rotor (rotating part) made with permanent magnets. A simple example of a permanent magnet
stepper motor is shown in Figure 12.15. The stator has four windings or poles and the rotor has one
complete magnet or two poles. The stator itself is magnetically conductive. The windings on the stator are
wired in pairs such that there are two phases: phase A and phase B. Power is applied to only one phase at
a time and the power sequencing is known as “electronic commutation.” When this occurs, one of the
windings in the phase pair becomes a north pole and the other winding becomes a south pole. Magnetic
attraction therefore causes the permanent magnet rotor to be aligned with the energized winding pair.
The alignment of the rotor with a winding pair corresponds with a “full step.”
Copyright © 2005 by CRC Press LLC
12
-14 Robotics and Automation Handbook
N
S
S
N
Phase A
Phase A
Phase B
Phase B
NS
Phase A
Phase A
Phase B
Phase B
Phase A
Phase A
Phase B
Phase B
S
N
N
S
Phase A
Phase A
Phase B
Phase B
SN
SN NS
0 degrees
90 degrees
180 degrees
270 degrees
FIGURE 12.15 Two-phase stepper motor power sequence.
As shown in the diagram at the top of the figure, phase A is powered (indicated by shading) causing the
rotor to be aligned at the 0
◦
position. Then, going clockwise in the figure, phase B is powered while phase
A is unpowered, causing the rotor to rotate to 90
◦
. Then, phase A is again powered but with current of
opposite polarity compared with the 0
◦
position. This causes the rotor to rotate to 180
◦
. The next step of
270
◦
is achieved when phase B is powered again with opposite polarity compared with the 90
◦
position.
Thus, the two poles in the rotor result in four discrete steps of 90
◦
within one complete rotation. The
direction of rotation can be changed by reversing the pulse sequence applied to the phases.
The torque required to move the rotor when there is no power applied to either phase is known as
the “detent torque.” The detent torque causes the clicks that can be felt if an unpowered stepper motor
is moved manually. The torque required to move the rotor when one of the phases is powered with DC
current is known as the “holding torque.”
Stepper motors may have higher numbers of poles in the rotor and the stator. These are created using
a magnet with multiple teeth on the rotor and additional windings on the stator. This will increase the
number of full steps per revolution. Many stepper motor manufacturers make stepper motors with 200
and 400 steps per revolution. This corresponds to step angles of 1.8
◦
and 0.9
◦
, respectively. Microstepping
Copyright © 2005 by CRC Press LLC
Sensors and Actuators 12
-
15
is a common feature on stepper motor drives that adjusts the amount of current applied to the phases.
This allows each full step to be subdivided into smaller steps and results in smoother motion.
Other types of stepper motors include variablereluctanceand hybrid stepper motors. Variable reluctance
stepper motors have a stator which is similar to the permanent magnet stepper motor, but the rotor is
composed of soft iron rather than a permanent magnet and also has multiple teeth. Because there are no
permanent magnets on the rotor, it is free to move with no detent torque if there is no power applied to
either of the phases. Hybrid stepper motors combine the principles of permanent magnet and variable
reluctance motors. The rotor has teeth like a variable reluctance motor but contains an axially magnetized
cylindrical magnet which is concentric with the shaft.
12.5.1.3 DC Brush Motor
DC brush motors convert applied current into output mechanical motion. They are a type of servomotor,
and the output torque is directly proportional to the applied current. As compared with stepper motors,
DC brush motors require a feedback signal for stable operation. They must be used closed-loop, and this
can make the system more complex than one using stepper motors. They also use conductive brushes for
mechanical rather than electric commutation and thus can have higher maintenance costs due to wear.
However, DC brush motors have smooth motion and higher peak torque and can be used at higher speeds
than stepper motors.
DC brush motors incorporate a stator with either permanent magnets or windings and a rotor with
windings. Windings in the stator are known as field windings or field coils. DC motors using permanent
magnets in the stator are known as permanent magnet DC motors. DC motors with windings in the stator
are known as series-wound or shunt-wound motors depending upon the connectivity of the windings in
relation to rotor windings. Series-wound motors have the field windings in series with the rotor while
shunt-wound motors have the field windings in parallel with the rotor.
All DC brush motors include conductive brushes which make sliding contact with a commutator as
the rotor turns. The commutator is attached to the rotor shaft and the rotor windings are connected to
the individual sections of the commutator. The commutator has as many sections as there are poles in the
rotor.
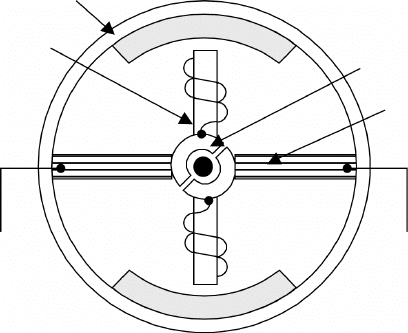
A simple example of a permanent magnet DC motor is shown in Figure 12.16. This motor has two poles
in the rotor. When voltage is applied to the brushes, current flows from the brushes to the commutator
and, in turn, to the windings. This creates a magnetic field in the rotor. The interaction between this field
stator
commutator
brush
S
N
rotor
–Vc +Vc
FIGURE 12.16 Permanent magnet DC brush motor with two poles.
Copyright © 2005 by CRC Press LLC
12
-16 Robotics and Automation Handbook
S
N
stator
rotor
Phase A
Phase A
Phase C
Phase B
Phase C
Phase B
FIGURE 12.17 Three-phase DC brushless motor.
and that of the stator causes the rotor to move until it is aligned with the magnetic field of the stator. Just as
the rotor is aligned, the brushes switch to the next section or contact of the commutator and the magnetic
field of the rotor is reversed. This causes the rotor to continue moving until it is aligned with the stator
again.
DC brush motors typically include multiple poles in the rotor to smooth out the motion and increase
torque.
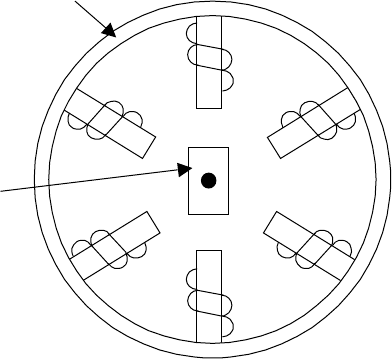
12.5.1.4 DC Brushless Motor
DC brushless motors are another type of servomotor in that feedback is required for stable operation. A DC
brushless motor is like a DC brush motor turned inside out because the rotor contains a permanent magnet
and the stator contains windings. The windings are electronically commutated so that the mechanical
commutator and brushes are no longer required as compared with a DC brush motor. Figure 12.17 shows
an example of a brushless motor with three phases (six poles connected in pairs).
DC brushless motors are commonly used in robotics applications because of their high speed capability,
improved efficiency, and lowmaintenancein comparison with DC brush motors. They are capableof higher
speeds because of the elimination of the mechanical commutator. They are more efficient because heat
from the windings in the stator can be dissipated more quickly through the motor case. Finally, they
require less maintenance because they do not have brushes that require periodic replacement. However,
the total system cost for brushless motors is higher than that for DC brush motors due to the complexity
of electronic commutation.
The position of the rotormust be known so that the polarityof current in the windings of the stator can be
switched at the correct time. Two types of commutation are used with brushless motors. With trapezoidal
commutation, the rotor position must only be known to within 60
◦
so that only three digital Hall effect
sensors are typically used. Sinusoidal commutation is employed instead of trapezoidal commutation when
torque ripple must be reduced for the motor. In this case, the rotor position must be determined more
accurately so that a resolver is used or an encoder is used in addition to Hall effect sensors. The Hall
effect sensors are needed with the encoder to provide rotor shaft position at startup. The resolver provides
absolute position information of the rotor shaft, so that the Hall effect sensors are not required for
startup.
Copyright © 2005 by CRC Press LLC
Sensors and Actuators 12
-
17
12.5.2 Fluid Power Actuators
12.5.2.1 Hydraulic Actuators
Hydraulic actuators are frequently used as joint or leg actuators in robotics applications requiring high
payload lifting capability. Hydraulic actuators output mechanical motion through the control of incom-
pressible fluid flow or pressure. Because incompressible fluid is used, these actuators are well suited for
force, position, and velocity control. In addition, these actuators can be used to suspend a payload without
significant power consumption. Another useful option when using hydraulics is that mechanical damping
can be incorporated into the system design.
The primary components in a hydraulic actuation system include:
1. A pump — converts input electrical power to hydraulic pressure
2. Valves — to control fluid direction, flow, and pressure
3. An actuator — converts fluid power into output mechanical energy
4. Hoses or piping — used to transport fluids in the system
5. Incompressible fluid — transfers power within the system
6. Filters, accumulator, and reservoirs
7. Sensors and controls
Positive displacement pumps are used in hydraulic actuator systems and include gear, rotary vane, and
piston pumps. The valves that are used include directional valves (also called distributors), on-off or check
valves, pressure regulator valves, flow regulator valves, and proportional or servovalves.
Both linear and rotary hydraulic actuators have been developed to convert fluid power into output
motion. A linear actuator is based on a rod connected to a piston which slides inside of a cylinder. The rod
is connected to the mechanical load in motion. The cylinder may be single or double action. A single action
cylinder can apply force in only one direction and makes use of a spring or external load to return the
piston to its nominal position. A double action cylinder can be controlled to apply force in two directions.
In this case, the hydraulic fluid is applied to both faces of the piston.
Rotary hydraulic actuators are similar to hydraulic pumps. Manufacturers offer gear, vane, and piston
designs. Another type of rotary actuator makes use of a rack and pinion design where a piston is used to
drive the rack and the pinion is used for the output motion.
Working pressures for hydraulic actuators vary between 150 and 300 bar. When using these actuators,
typical concerns include hydraulic fluid leaking and system maintenance. However, these can be mitigated
through intelligent engineering design.
Hydraulic actuators have been used in many factory automation problems and have also been used
in mobile robotics. Figure 12.18 is a picture of the TITAN 3 servo-hydraulic manipulator system from
Schilling Robotics. This is a remote manipulator that was originally developed for mobile underwater
applications but is also being used in the nuclear industry.
12.5.2.2 Pneumatic Actuators
Pneumatic actuators are similar to hydraulic actuators in that they are also fluid powered. The difference
is that a compressible fluid, pressurized air, is used to generate output mechanical motion. Pneumatic
actuators have less load carrying capability than hydraulic actuators because they have lower working
pressure. However, pneumatic actuators have advantages in lower system weight and relative size. They
are also less complex in part because exhausted pressurized air in the actuator can be released to the
environment through an outlet valve rather than sent through a return line.
Because compressed air is used, the governing dynamic equations of pneumatic actuators are nonlinear.
In addition, compressed air adds passive compliance to the actuator. Thesetwo factors make these actuators
more difficult to use for force, position, and velocity control. However, pneumatic actuators are frequently
used in industry for discrete devices such as grippers on robotic end effectors.
Copyright © 2005 by CRC Press LLC