Kurfess T.R. Robotics and Automation Handbook
Подождите немного. Документ загружается.

Design of Robotic End Effectors 11
-17
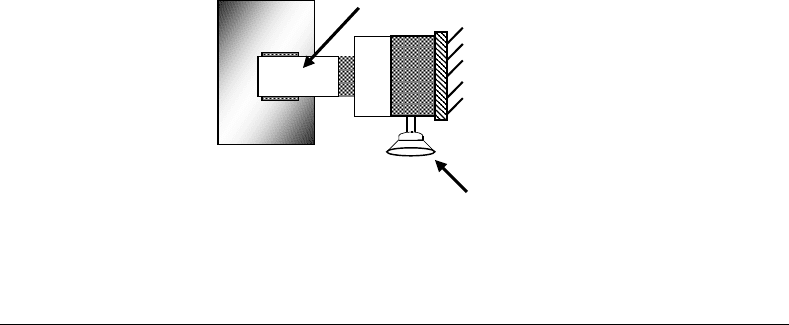
Vacuum Lifter
Normal Gripper
FIGURE 11.19 Multi-tool end effector.
11.8 Sensors and Control Considerations
A variety of sensors is available for inclusion in end effectors. The most common sensors employed in end
effectors measure proximity, collision, and force.
11.8.1 Proximity Sensors
Through beam and reflective optical proximity sensors are widely used to verify the grasping of an object.
Typically the sensors are used as presence indicators. The weight of the sensor on the end effector should be
minimized because of payload considerations. Most optical proximity sensors are available with an optical
fiber end connection so that sensor electronics will not necessarily be located on the end effector. Place
as much sensor hardware as possible remote to the end effector. Grippers may be designed with built-in
limit switches for grasping fixed dimensional objects. A common implementation of this is the use of Hall
effect or reed switches with air cylinder pistons.
Inductive and capacitive proximity sensors may be used with compatible object materials such as carbon
steels. Materials such as stainless steel, aluminum, brass, and copper may also be sensed but at a reduced
detection distance.
If a non-contact distance measurement is required rather than a presence verification, laser diode-based
analog sensors or a machine visionsensor can be used. For extremely close-range and precise measurements
(such as part dimensional measurements) eddy current sensors may be used on metallic components.
11.8.2 Collision Sensors
Although compliance centers (discussed earlier) help align parts, ease assembly, and reduce potential
damage, damage may still occur because of design limits (angle and position tolerances, as specified by
manufacturers or design). Thus, a collision detection sensor can be a good end effector component to
mitigate damage to the robot, inserted part, or workpiece where the part is being attached. Collision
detection sensors detect the first onset of a collision in all directions. After detecting the start of a collision,
the robot can be stopped or backed away before damage has occurred. (Note that while proximity sensors
can also be used as collision avoidance devices, most are unidirectional with a limited field of view.)
Collision detection devices are usually attached at the end of arm before the end effector.
There are several types of collision detection sensors available for wrist mounting. These include force
sensors as an active control device. Force sensors are primarily strain gauge devices and require additional
programming for monitoring and control.
Specific collision detection sensors are readily available in the market place. These are passive devices.
Some utilize compressed air for variability of fault loading in three-dimensional space. Other collision
sensor designs are based on mechanical springs at preset loads. Both types indicate a collision by the
opening of a normally closed switch. This design can be hardwired into the E-stop circuit for safety or be
wired to a digital input for programmatic monitoring.
Copyright © 2005 by CRC Press LLC
11
-18 Robotics and Automation Handbook
11.8.3 Tactile Feedback/Force Sensing
Force sensing during grasping is important for successful grasping of varying parts, compliant part, and
for reduction of part deformation. In the past strain gauge sensors were the primary device used. These,
however, are of limited use in the multiple-point force sensing. Piezoelectric force sensors are also available
but are better for measuring dynamic loads because of charge leakage.
Piezoresistor force sensors can be used for tactile force sensing using the principle that the resistance of
silicon-implanted piezoresistors will increase when the resistors flex under any applied force. The sensor
concentrates the applied force through a stainless steel plunger directly onto the silicon sensing element.
The amount of resistance changes in proportion to the amount of force being applied. This change in
circuit resistance results in a corresponding mV output level.
A relatively new development is the commercial availability of force sensing resistors (FSR). The FSR
is a polymer thick film (0.20 to 1.25 mm PTF) device which produces a decrease in resistance with any
increase in force applied to its surface. Although FSRs have properties similar to load cells, they are not
well suited for precision measurement equipment (variation of force from grasping can be on the order of
10%). Its force sensitivity is optimized for use in human touch control switches of electronic devices with
pressure sensitivity in the range of 0.5 to 150 psi (0.03 to 10 kg/cm
2
) [24].
In general, the FSR’s resistance vs. force curve approximately follows a power-law relationship (resistance
decreasing with force). At the low force end of the force-resistance characteristic, a step response is evident.
At this threshold force, the resistance drops substantially. At the high force end of the sensor range, the
resistancedeviatesfrom the power-law behavior and ultimately levels to an output voltage saturation point.
Between these extremes is a limited but usable region of a fairly linear response. The relatively low cost,
small thickness, and reasonable accuracy make these sensors attractive for multi-sensor tactile control.
11.8.4 Acceleration Control for Payload Limits
Another important control aspect is the force caused during acceleration. Thus, the accelerations of the
joints must be known and prescribed (or carefully estimated). In most instances the acceleration limits
on each joint are known. Typically accelerations are defined by S-curves for velocity, with maximum
accelerations limits.
11.8.5 Tactile Force Control
Traditional position and velocity control for trajectories are obviously important for painting, welding,
and deburing robots. However, to create quality products, it is also necessary to have force control for
material removal operations such as grinding and deburing. In these situation the compliance of the robot,
end effector, and tool make up total compliance (flexibility). When a tool is moved against an object, the
inverse of this compliance (stiffness) creates a force. To assure that dimensional accuracy is maintained,
an additional position measurement of the tool tip must be made or position must be taken into account
by the use of a compliance model. The stiffness of each joint is easily determined. However, each unique
position of the joints creates a unique stiffness.
Generally fixed-gain controllers (such as PID-type controllers) are preferred for force applications
because of their simplicity in implementation. These controllers are easily tuned using standard
approaches.
Tuning the force control loop is best done using position control and the effective stiffness from the
end effector-workpiece interaction. Many industrial controllers provide utilities for automatic tuning of
position loops. Many are based on the Ziegler-Nichols PID tuning [25] or other heuristic techniques.
Although this technique is based on continuous systems for very fast sampling rates (greater than 20 times
the desire bandwidth), the results also apply well to discrete systems.
Copyright © 2005 by CRC Press LLC

Design of Robotic End Effectors 11
-19
11.9 Conclusion
From the preceding text it is clear that the design, selection, control, and successful implementation of a
robotic system relies heavily on the end effector subsystem. End effector designs and technology continue
to evolve with new actuators, sensors, and devices.
References
[1] Ceglarek, D., Li, H.F., and Tang, Y., Modeling and optimization of end effector layout for handling
compliant sheet metal parts, J. Manuf. Sci. Eng., 123, 473, 2001.
[2] Ciblak, N., Analysis of Cartesian stiffness and compliance with applications, Ph.D. Thesis Defense,
Georgia Institute of Technology, 1998.
[3] Robotic Accessories, Alignment Device 1718 Specifications, 2003.
[4] Thermo CRS, A465 Six Axis Robot Specification, 2003.
[5] Kane, T.R., Dynamics: Theory and Applications, McGraw-Hill, New York, 1985.
[6] Yang, K. and Gu, C.L., A novel robot hand with embedded shape memory alloy actuators, J. Mech.
Eng. Sci., 216, 737, 2002.
[7] Francois, C., Ikeuchi, K., and Herbert, M., A three finger gripper for manipulation in unstructured
Environments, IEEE Int. Conf. Robot. Autom., 3, 2261–2265, 1991.
[8] Foster, A., Akin, D., and Carignan, C., Development of a four-fingered dexterous robot end-effector
for space operations, IEEE Int. Conf. Robot. Autom., 3, 2302–2308, 2002.
[9] Kaneko, M. et al., Grasp and manipulation for multiple objects, Adv. Robot., 13, 353, 1999.
[10] Kumazaki, K. et al., A study of the stable grasping by a redundant multi-fingered robot hand, SICE,
631, 2002.
[11] Mason, M. and Salisbury, J., Robotic Hands and the Mechanics of Manipulation, MIT Press, Boston,
1985.
[12] Seguna, C.M., The design, construction and testing of a dexterous robotic end effector, IEEE SPC,
2001.
[13] Bicchi, A., Hands for dexterous manipulation and robust grasping: a difficult road towardsimplicity,
IEEE Trans. Robot. Autom.,16, 652, 2000.
[14] Caldwell, D.G. and Tsagarakis, N., Soft grasping using a dexterous hand, Indust. Robot, 3, 194,
2000.
[15] Bicchi, A. and Kumar, V., Robotic grasping and contact: a review, IEEE Int. Conf. Robot. Autom.,
200, 348, 2000.
[16] Taylor, C.L. and Schwarz, R.J., The Anatomy and Mechanics of the Human Hand: Artificial Limbs,
vol. 2, 22–35, 1955.
[17] Zajac, T., Robotic gripper sizing: the science, technology and lore, ZAYTRAN, 2003.
[18] Baumeister, T. (ed.), Marks’ Standard Handbook for Mechanical Engineers, 8th ed., McGraw-Hill,
New York, 6–24, 1978.
[19] Causey, G.C. and Quinn, R.R., Gripper design guidelines for modular manufacturing, IEEE Int.
Conf. Robot. Autom., 1453, 1998.
[20] Walsh, S., Gripper design: guidelines for effective results, Manuf. Eng., 93, 53, 1984.
[21] Adept Technologies, AdeptSix 300 Specifications Data Sheet, 2003.
[22] Zhang, T. and Goldberg, K., Design of robot gripper jaws based on trapezoidal modules, IEEE Int.
Conf. Robot. Autom., 29, 354, 2001.
[23] Derby, S. and McFadden, J., A high precision robotic docking end effector: the dockbot(TM), Ind.
Robot, 29, 354, 2002.
[24] Interlink Electronics, FSR Data sheet, 2003.
[25] Franklin, G.F., Powell, J.D., and Workman, M.L., Digital Control of Dynamic Systems, Addison-
Wesley, Reading, MA, 1990.
Copyright © 2005 by CRC Press LLC

12
Sensors and Actuators
Jeanne Sullivan Falcon
National Instruments
12.1 Encoders
Rotary and Linear Incremental Encoders
•
Tachometer
•
Quadrature Encoders
•
Absolute Encoders
12.2 Analog Sensors
Analog Displacement Sensors
•
Strain
•
Force and Torque
•
Acceleration
12.3 Digital Sensors
Switches as Digital Sensors
•
Noncontact Digital Sensors
•
Solid State Output
•
Common Uses for Digital Sensors
12.4 Vision
12.5 Actuators
Electromagnetic Actuators
•
Fluid Power Actuators
12.1 Encoders
12.1.1 Rotary and Linear Incremental Encoders
Incremental encoders are the most common feedback devices for robotic systems. They typically output
digital pulses at TTL levels. Rotary encoders are used to measure the angular position and direction of a
motor or mechanical drive shaft. Linear encoders measure linear position and direction. They are often
used in linear stages or in linear motors. In addition to position and direction of motion, velocity can also
be derived from either rotary or linear encoder signals.
In a rotary incremental encoder, a glass or metal disk is attached to a motor or mechanical drive shaft.
The disk has a pattern of opaque and transparent sectors known as a code track. A light source is placed
on one side of the disk and a photodetector is placed on the other side. As the disk rotates with the motor
shaft, the code track interrupts the light emitted onto the photodetector, generating a digital signal output
(Figure 12.1).
The number of opaque/transparent sector pairs, also known as line pairs, on the code track corresponds
to the number of cycles the encoder will output per revolution. The number of cycles per revolution (CPR)
defines the base resolution of the encoder.
12.1.2 Tachometer
An incremental encoder with a single photodetector is known as a tachometer encoder. The frequency
of the output pulses is used to indicate the rotational speed of the shaft. However, the output of the
single-channel encoder cannot give any indication of direction.
Copyright © 2005 by CRC Press LLC
12
-2 Robotics and Automation Handbook
Light
Source
Disk
Photo Sensor
Pickup
FIGURE 12.1 Typical encoder design.
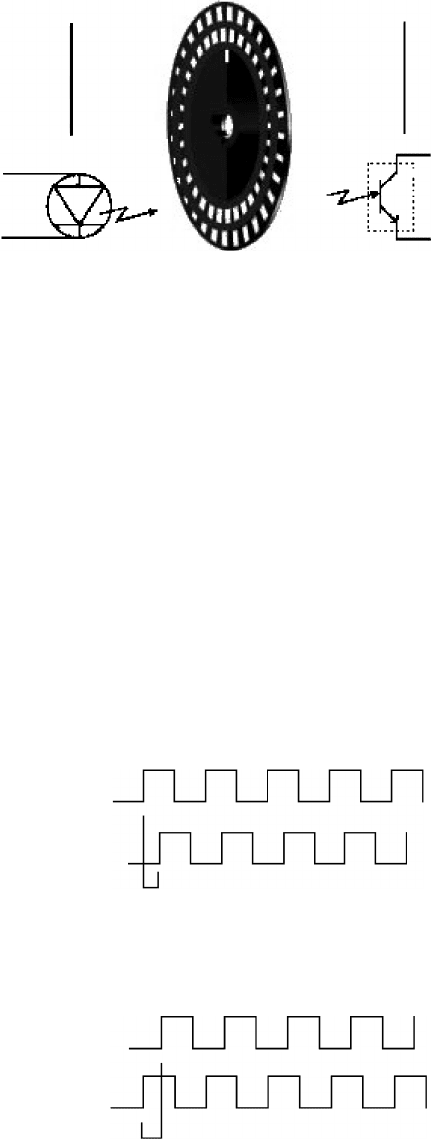
12.1.3 Quadrature Encoders
Quadrature encoders are another type of incremental encoder. A two-channel quadrature encoder uses
two photodetectors to sense both position and direction. The photodetectors are offset from each other by
90
◦
relative to one line pair on the code track. Since the two output signals, A and B, are 90
◦
out of phase,
one signal will lead the other as the disk rotates. If A leads B, the disk is rotating in a clockwise direction,
as shown in Figure 12.2. If B leads A, the disk is rotating in a counterclockwise direction, as shown in
Figure 12.3.
Figure 12.2 and Figure 12.3 illustrate four separate pulse edges occurring during each cycle. A separate
encoder count is generated with each rising and falling edge, which effectively quadruples the encoder
resolution such that a 500 CPR (cycles per revolution) encoder provides 2000 counts per revolution with
quadrature decoding.
The electrical complements of channels A and B may be included as differential signals to improve noise
immunity. This is especially important in applications featuring long cable lengths between the encoder
and the motion controller or electrical drive.
Channel A
Channel B
90°
FIGURE 12.2 Clockwise motion.
Channel A
Channel B
90°
FIGURE 12.3 Counterclockwise motion.
Copyright © 2005 by CRC Press LLC
Sensors and Actuators 12
-
3
Some quadrature encoders include a third output channel, known as an index or zero pulse. This signal
supplies a single pulse per revolution and is used for referencing the position of the system. During power
up of the system, the motor can be rotated until the index pulse occurs. This specifies the current position
of the motor in relation to the revolution.
Moving to the index position is not enough to determine the position of the motor or mechanical system
during system startup. The absolute position is usually determined through a homing routine where the
system is moved to limit switches or sensors. Once the robot is commanded to move to the limits, then
the encoder readings can be reset to zero or some other position value to define the absolute position.
Subsequent motion is measured by the encoders to be relative to this absolute position.
Encoders can be attached to components other than motors throughout a mechanical system for
measurement and control. For example, a rotary motor may be attached to a belt drive that is in turn
attached to a payload under test. A rotary encoder is attached to the motor to provide feedback for control,
but a second rotary encoder can also be attached to the payload to return additional feedback for improved
positioning. This technique is known as dual-loop feedback control and can reduce the effects of backlash
in the mechanical components of the motion system.
Some encoders output analog sine and cosine signals instead of digital pulses. These types of encodersare
typically used in very high precision applications that require positioning accuracy at the submicron level.
In this case, an interpolation module is necessary between the encoder output and the robot controller
or intelligent drive. This functionality may be included in the robot controller. Interpolation modules
increase the resolution of the encoder by an integer value and provide a digital quadrature output for
use by the robot controller. Some encoder manufacturers offer interpolation modules in a wide range of
multiplier values. Manufacturers of encoders include BEI, Renco, US Digital, Renishaw, Heidenhain, and
Micro-E.
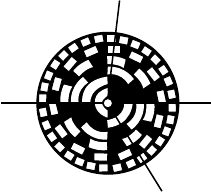
12.1.4 Absolute Encoders
A position can be read from an absolute encoder if the application requires knowledge of the position of
the motors immediately upon system start-up. An absolute encoder is similar to an incremental encoder,
except that the disk used has multiple concentric code tracks and a separate photodetector is used with
each code track. The number of code tracks is equivalent to the binary resolution of the encoder, as shown
in Figure 12.4.
An 8-bit absolute encoder has eight code tracks. The 8-bit output is read to form an 8-bit word indicating
absolute position. While absolute encoders are available in a wide variety of resolutions, 8-, 10-, and 12-bit
binary are the most common. Due to their complexity, absolute encoders are typically more expensive
than quadrature encoders. Absolute encoders may output position in either parallel or serial format.
Because of the variety of output formats available for absolute encoders, it is important to ensure that
the robot controller or intelligent drive is compatible with the particular model of the absolute encoder.
111111 000000
010101
001110
FIGURE 12.4 Absolute encoder example.
Copyright © 2005 by CRC Press LLC

12
-4 Robotics and Automation Handbook
12.2 Analog Sensors
Analog sensors commonly used in robotic applications include displacement, force, torque, acceleration,
and strain sensors. As in the case of encoders, these sensors may be used in either an open-loop or closed-
loop fashion within the robot system. For example, a force sensor may be used to measure the weight of
objects being assembled for quality control. Or, a force sensor may be added to the gripper in a robot end
effector as feedback to the gripper actuator. The gripper control system would allow objects to be held
with a constant force.
12.2.1 Analog Displacement Sensors
These sensors can include both angular and translation position measurement relative to a reference
position. They provide a continuously varying output signal which is proportional to the position of the
sensed object. The most common sensors and technologies used for displacement measurement include:
r
Potentiometer
r
LVDT — contact sensor
r
Resolvers
r
Inductive
r
Capacitive
r
Optical
r
Ultrasonic
r
Hall effect
12.2.1.1 Potentiometers
Potentiometers offer a low cost method of contact displacement measurement. Depending upon their
design, they may be used to measure either rotary or linear motion. In either case, a movable slide or
wiper is in contact with a resistive material or wire winding. The slide is attached to the target object in
motion. A DC or an AC voltage is applied to the resistive material. When the slide moves relative to the
material, the output voltage varies linearly with the total resistance included within the span of the slide. An
advantage of potentiometers is that they can be used in applications with a large travel requirement. Some
industrial potentiometers are offered in sealed configurationsthat can offer protection from environmental
contamination.
12.2.1.2 Linear Variable Differential Transformers (LVDT)
Linear variable differential transformers are used for contact displacement measurement. They include a
moving core which extends into the center of a hollow tube as shown in Figure 12.5. One primary and
two secondary coils are wrapped around the hollow tube with the secondary coils symmetrically placed
around the primary. The core is attached to the target object in motion.
An AC signal is applied to the primary coil and, because of coupling of magnetic flux between the coils,
this induces AC voltages in the secondary coils. The magnitude and phase of the output signal of the LVDT
primary coil secondary coilsecondary coil
core
FIGURE 12.5 Linear variable differential transformer.
Copyright © 2005 by CRC Press LLC

Sensors and Actuators 12
-
5
is determined by the position of the core within the tube. The magnitude of the output of the signal is a
function of the distance of the core from the primary coil, and the phase of the output signal is a function
of the direction of the core from the primary coil — towards one secondary coil or the other as shown in
the figure.
LVDTsensorscanbeused in applications with large travelrequirements.However,mechanicalalignment
along the direction of travel is important for this type of sensor.
12.2.1.3 Resolvers
A resolver is essentially a rotary transformer that can provide absolute position information over one revo-
lution. The resolver consists of a primary winding located on the rotor shaft and a two secondary windings
located on the stator. The secondary windings are oriented 90
◦
relative to each other. Energy is applied to
the primary winding on the rotor. As the rotor moves, the output energy of the secondary windings varies
sinusoidally. Resolvers are an alternative to encoders for joint feedback in robotic applications.
12.2.1.4 Inductive (Eddy Current)
Inductive sensors are noncontact sensors and can sense the displacement of metallic (both ferrous and
nonferrous) targets. The most common type of inductive sensor used in robotics is the eddy current sensor.
The sensor typically consists of two coils of wire: an active coil and a balance coil, with both driven with a
high frequency alternating current. Whena metallic target is placed near the activesensor coil, the magnetic
field from the active coil induces eddy currents in the target material. The eddy currents are closed loops
of current and thus create their own magnetic field. This field causes the impedance of the active coil to
change. The active coil and balance coil are both included in a bridge circuit. The impedance change of
the active coil can be detected by measuring the imbalance in the bridge circuit. Thus, the output of the
sensor is dependent upon the displacement of the target relative to the face of the sensor coil.
The effective depth of the eddy currents in the target material, δ, is given by
δ =
1
π f µσ
where f is the excitation frequency of the coil, µ is the magnetic permeability of the target material, and
σ is the conductivity of the target material. In order to ensure adequate measurement, the target material
must be three times as thick as the effective depth of the eddy currents.
In general, the linear measurement range for inductive sensors is approximately 30% of the sensor
active coil diameter. The target area must be at least as large as the surface area of the sensor probe. It is
possible to use curved targets, but their diameter should be three to four times the diameter of the sensor
probe. In addition, the sensor signal is weaker for ferrous target materials compared with nonferrous target
materials. This can lead to a reduced measurement range and so this should be investigated with the sensor
manufacturer.
Inductive sensors can sense through nonmetallic objects or nonmetallic contamination. However, if
measurement of a nonmetallic target displacement is required, then a segment of metallic material must
be attached to the target.
12.2.1.5 Capacitive
Capacitive displacement sensors are another type of noncontact sensor and are capable of directly sensing
both metallic and nonmetallic targets. These sensors are designed using parallel plate capacitors. The
capacitance is given by
C =
ε
r
ε
0
A
d
whereε
r
is the relativepermittivity(dielectricconstant) of the material between the plates, ε
0
is the absolute
permittivity of free space, A is the overlapping area between the plates, and d is the distance between the
plates.
Copyright © 2005 by CRC Press LLC

12
-6 Robotics and Automation Handbook
d
A
sensor plate sensor plate
targettarget
C
C
FIGURE 12.6 Distance and area variation in capacitive sensor measurement.
In displacement sensor designs, a capacitive sensor typically incorporates one of the capacitor plates
within its housing and the target forms the other plate of the capacitor. The sensor then operates on the
principle that the measured capacitance is affected by variation in the distance d or the overlapping area A
between the plates. The capacitance is measured by detecting changes in an oscillatory circuit that includes
the capacitor. Figure 12.6 shows the distance and area variation methods for capacitive displacement
measurement.
Fordetection of nonmetallic targets, a stationarymetallic referenceis used as the external capacitor plate.
The presence of the nonmetallic target in the gap between the sensor and the stationary metallic reference
will change the permittivity and thus affect the measured capacitance. The capacitance will be determined
by the thickness and location of the nonmetallic target. Figure 12.7 shows the dielectric variation approach
for capacitive displacement measurement.
In general, the linear measurement range for capacitive sensors is approximately 25% of the sensor
diameter. The target should be 30% larger than the sensor diameter for optimum performance. In addition,
environmental contamination can change the dielectric constant between the sensor and the target, thus
reducing measurement accuracy.
12.2.1.6 Optical Sensors
Optical sensors provide another means of noncontact displacement measurement. There are several types
which are commonly used in robotics: optical triangulation, optical time-of-flight, and photoelectric.
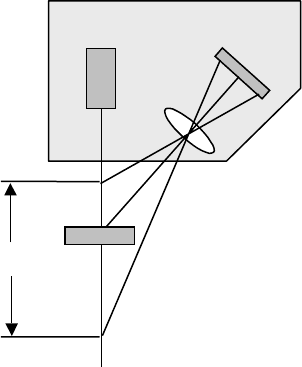
12.2.1.6.1 Optical Triangulation
Optical triangulation sensors use a light emitter, either a laser or an LED, in combination with a light
receiver to sense the position of objects. Both the emitter and receiver are contained in the same housing
as shown in Figure 12.8. The emitter directs light waves toward a target. These are reflected off the target,
through a lens, to the receiver. The location of the incident light on the receiver is used to determine
the position of the target in relation to the sensor face. The type of receiver used may be a position
sensitive detector (PSD) or a pixelized array device such as a charge coupled device (CCD). The PSD
receiver generates a single analog output and has a faster response time than the output pixelized array
device because less post-processing is required. It is also typically smaller so that the overall sensor size
will be smaller. Pixelized array devices, however, are useful when the surface of the target is irregular or
transparent.
non-metallic target
metallic reference
sensor plate
C
FIGURE 12.7 Dielectric variation in capacitive sensor measurement.
Copyright © 2005 by CRC Press LLC
Sensors and Actuators 12
-
7
emitter
receiver
target
range
lens
FIGURE 12.8 Optical triangulation displacement sensor.
Important specifications for this type of sensor are the working range and the standoff distance. The
standoff distance is the distance from the sensor face to the center of the working range.
Both diffuse and specular designs are available for this type of sensor. A diffuse design is useful for
targets with surfaces which scatter light such as anodized aluminum. A specular design is useful for targets
with surfaces which reflect light well such as mirrors. In addition, the target color and transparency should
also be considered when investigating this type of sensor because these properties affect the absorption of
light by the target.
Optical triangulation sensors are high resolution and typically offer ranges up to one half meter. Higher
ranges can be achieved, albeit with significantly increased cost.
12.2.1.6.2 Optical Time-Of-Flight
Optical time-of-flight sensors detect the position of objects by measuring the time it takes for light to
travel to the object and back. As in the case of optical triangulation sensors, time-of-flight sensors also
contain an emitter and a receiver. The emitter is a laser or an LED while the receiver is a photodiode. The
emitter generates one or more pulses of light toward a target. Some of the light is reflected off the target
and captured by the photodiode. The photodiode generates a pulse when it receives the light, and the time
difference between the emitted pulse and the received pulse is determined by the sensor electronics. The
distance to the target is then calculated based on the speed of light and the time difference.
Most time-of-flight sensors have measurement ranges of several meters. However, laser based time-of-
flight sensors can have a range of several miles if a series of pulses from the emitter is used. The accuracy
of these sensors is not as high as optical triangulation sensors but the range is typically greater.
12.2.1.6.3 Analog Photoelectric
Photoelectric sensors are noncontact displacement sensors which measure the position of objects by
measuring the intensity of reflected light from the object. Again, an emitter and a receiver are used. An
LED is used as the emitter and a phototransistor or photocell is used as the receiver. Photoelectric sensors
are most often used as digital proximity sensors, but one category, diffuse-mode proximity, can be used as
an analog sensor for measuring distance. In this design, light generated by the emitter is directed toward
the target. Light reflected from the target is captured by the receiver. The analog output from the receiver
is proportional to the intensity of the light received from the target. This output will be proportional to
the distance of the target from the receiver.
Copyright © 2005 by CRC Press LLC