Коренский В.Ф. Теория механизмов, машин и манипуляторов. Часть 2
Подождите немного. Документ загружается.

131
3
343
156 191 мм,
280
450
156 251 мм.
280
dc
cl
=⋅=
=⋅=
При графическом решении уравнения (3.4) вектор ускорения Кориоли-
са
45 3
k
DD
a
направляем как вектор скорости
45 3DD
V
, повернутый на 90° в на-
правлении
3
ω
, оба направления находим с помощью плана положений меха-
низма (рис. 5.1) по тенденции изменения длины
СD
3
.
Построенный план ускорений используем для определения ускоре-
ний центров масс и угловых ускорений звеньев:
2
11
74 0,05 3, 7 м / с ;
Sa
as=π ⋅µ = ⋅ =
2
22
140 0,05 7,0 м / с ;
Sa
as=π ⋅µ = ⋅ =
2
33
125 0,05 6, 25 м / с ;
Sa
as=π ⋅µ = ⋅ =
2
55
186 0,05 9,3 м / с ;
Sa
as=π ⋅µ = ⋅ =
-2
1
0, 79 c ;ε=
()
1
-2
2
123 0, 05
31,7 с ;
0,194
BA
a
BA BA
вn
a
ll
τ
µ
⋅
ε= = = =
(
)
2
-2
3
156 0,05
27,9 c .
0,280
BC
a
B
CBC
вn
a
ll
τ
µ
⋅
ε= = = =
3.2.2. Расчет сил инерции
Имея данные об ускорении, находим силы инерции:
111
2, 46 3, 7 9,1 Н
И S
Ф ma==⋅=
;
222
5,82 7, 0 40,7 Н
И S
Ф ma=⋅ = ⋅ =
;
333
13,5 6, 25 84, 4 Н
И S
Ф ma=⋅ = ⋅ =
;
555
25, 2 9,3 234, 4 Н
И S
Ф ma==⋅=
;
*
1
111 51
4
И SKZ
J
М JJJ
⎛⎞
=ε= ++ ε=
⎜⎟
⎝⎠
3
32 4
5,51 10
1,72 10 1,30 10 0,033 5,3 10 Нм;
4
−
−− −
⎛⎞
⋅
=+⋅+⋅⋅=⋅⋅
⎜⎟
⎝⎠

132
2
222
1,83 10 31,7 0,58 Нм;
И S
М J
−
=⋅ε= ⋅ ⋅ = ⋅
1
3
333 3
9,1 10
27,5 6, 25 Нм,
44
И S
J
М J
−
⋅
=⋅ε=⋅ε= ⋅ = ⋅
где
1S
J
∗
– момент инерции относительно оси вращения О зубчатого колеса
Z
5
и кулачка, связанных между собой с помощью главного вала кривошипа
ОА. Значения моментов инерции взяты из табл. 2.6.
3.2.3. Определение реакций в кинематических парах
Прикладываем силы инерции и моменты сил инерции к соответст-
вующим звеньям противоположно ускорениям центров масс и угловым ус-
корениям этих звеньев. Кроме того, в центрах масс прикладываем силы
тяжести звеньев:
11
2, 46 9,8 24, 0 Н;Gmg== ⋅≈
22
5,82 9, 8 58, 0 Н;Gmg==⋅≈
33
13,5 9,8 130 Н;Gmg==⋅≈
(
)
4
0 пренебрегаем ;G =
55
25, 2 9,8 250 Н;Gmg==⋅≈
55
4, 325 9,8 40 Н;
ZZ
Gmg==⋅≈
1, 3 9, 8 13 Н.
kk
Gmg==⋅≈
К рабочему органу прикладываем силу полезного сопротивления,
которая в соответствии с графиком полезных нагрузок в рассматриваемом
положении станка составляет:
..
1, 6 кН
ПС P
FF==
.
Расстояние линии действия
F
P
от направляющей резцедержателя по
[12, с. 240] составляет:
0,3 0,3 0, 082 0, 025 м
OA
bl=⋅=⋅ ≈
.
К кривошипу ОА прикладываем уравновешивающую силу
P
Z4-Z5
,
действующую на колесо
Z
5
со стороны отсоединяемого колеса Z
4
по линии
зацепления зубьев колес, составляющей угол 70
о
с линией их межосевого
расстояния. Положение указанной линии задаем, исходя из удобств разме-
щения двигателя (габаритный размер двигателя
d
30
возьмем из [4, табл. 2.5]) и
получения минимальных габаритов станка.
Отделяем от механизма два последних звена 4 и 5 (структурная
группа Ассура), а действие отброшенных звеньев заменяем реакциями. На
133
звено 5 со стороны стойки 0 действует реакция
05
P
, а на звено 4 – реакция
со стороны кулисы
34
P
. Реакции направлены перпендикулярно относи-
тельным перемещениям звеньев, образующих кинематическую пару.
Для определения модулей и направлений реакций
05
P и
34
P строим
замкнутый многоугольник – план сил (рис. 5.2):
5
05
5
34
0
P И
PFGФ P+++ +=
,
Выбрав масштаб построения
5H/мм
P
µ=
,
неизвестные
05
P и
34
P определяем из плана, умножая соответствующие
им отрезки на величину
P
µ
. Получаем:
05
126 5 630 H;P =⋅=
34
285 5 1425 H.P =⋅=
Из условия равновесия кулисного камня 4 находим
3454
PP −= ;
а по модулю они составляют:
HPP 1425
3454
== .
Точку Е приложения реакции
05
P к ползуну 5 со стороны стойки на-
ходим из уравнения равновесия ползуна в форме моментов относительно
центра шарнира
45
D
:
aPbF
P
⋅
=
⋅
05
,
откуда можно найти
05
1, 6
0, 025 0, 0635 м
0, 63
P
F
ab
P
==⋅ =
.
Отделяем структурную группу, состоящую из звеньев 3 и 2, нагру-
жаем ее известной реакцией
3454
PP −= , реакциями
03
P и
12
P , которые
раскладываем на нормальные (сходятся в шарнире
В) и тангенциальные
(перпендикулярные им) составляющие. Составляем уравнение равновесия
каждого из звеньев
АВ и ВС в форме моментов относительно центра шар-
нира
В. Из этих уравнений вычисляем:
134
22 2 2
2
12
40,7 8 0,001 58, 0 96 0,001 0,58
24,0 H;
0,194
ИИeGeИ
AB
Ф hGh M
P
l
τ
⋅
µ− ⋅ ⋅µ+
==
⋅⋅ − ⋅ ⋅ +
==−
33 3 3
343
03
84,4 55 0,001 130 15 0,001 6, 25 1425 60 0,001
306,6 H,
0,280
ИИ eGeИ e
BC
Ф hGhМ PCD
P
l
τ
⋅⋅µ+⋅µ− + µ
==
⋅⋅ + ⋅⋅ − + ⋅⋅
==
где плечи соответствующих сил
i
h (в мм) измерены по чертежу (рис. 5.2).
Строим план сил по уравнению:
23
12 12 43 03 03
23
0
nn
ИИ
PPGФ G Ф PPP
ττ
+++ ++ +++=
и находим:
τ
1212
12
PPP
n
+=
, по модулю
12
320 5 1600 HP =⋅=
,
τ
0303
03
PPP
n
+=
, по модулю
03
87 5 435 HP
=
⋅=
,
2
2
12
23
32 И
ФGPPP ++=−=
, по модулю
32
327 5 1635 HP =⋅=
.
Далее рассматриваем кривошип
ОА вместе с зубчатым колесом Z
5
и
соединяющим их валом
О. 1,1,1
21
=
=
=
PPn ; по формуле Чебышева полу-
чаем степень подвижности
W = 0. Прикладываем к этому звену силу инер-
ции
1
И
Ф
, момент сил инерции
1
И
М
, реакцию
21
Р , вес
1
G
∗
и неизвестные –
уравнивающую силу
45
Z
Z
Р
−
(силу в зацеплении колес
45
Z
Z
−
) и реакцию на
кривошип со стороны стойки (
01
Р ).
Уравнение равновесия кривошипа
АО решаем относительно неиз-
вестной
45
Z
Z
Р
−
:
()
21 21 1 1 1 1 1
45
0,5 5 cos
ИИ e И
ZZ
Ph Ф hGh М
P
d
−
⋅− ⋅ −⋅µ−
==
⋅α
()
4
1600 48 9,1 0 24 32 0,001 5,3 10
1044 H,
0,5 0,155 cos 20
−
⋅+ ⋅−⋅ ⋅ − ⋅
==
⋅⋅
реакцию
01
P
находим из плана сил для главного вала:
∗
Кроме G
1
, вес G
1
*
включает веса других насаженных на вал деталей.

135
12 1 4 5 01
15
0
И ZZ
Zk
PGG GФ PP
∗
−
++ ++ + + =
.
Построив план сил, находим
01
497 5 2495 HP =⋅=
.
Рассмотренная часть силового расчета в исследуемом положении
рычажного механизма является началом этого расчета.
Далее расчет выполняется так:
1) отделяем механизм поперечной подачи стола, включающий стол,
храповой, рычажный и кулачковый механизмы. Отделяя от этого механиз-
ма структурные группы, нагружая силами и рассматривая равновесие, на-
ходим реакции в кинематических парах, включая реакцию между
роликом
кулачкового механизма и кулачком;
2) уточняем расчет кривошипа
ОА с учетом реакций;
3) отделяем структурную группу, состоящую из водила
Н планетар-
ной передачи (вместе с зубчатым колесом
Z
5
) и сателлита Z
2
(два звена, две
высших и две низших кинематических пары). Из условия равновесия этой
группы определим реакции в зубчатых зацеплениях сателлита с централь-
ными колесами
Z
1
и Z
3
(по линиям зацепления), действия водила Н на
стойку
О и на сателлит Z
2
.
Расчет заканчиваем начальным механизмом станка, включающим
ротор асинхронного электродвигателя и насаженное на его вал централь-
ное колесо
Z
1
планетарного механизма.
Полученные значения реакций используем при разработке конструкций
кинематических пар (рассматривается в курсе «Детали машин») и для уточне-
ния КПД в расчетном положении несущего механизма (рассматриваем ниже).
3.3. Определение мгновенного КПД,
оценка интенсивности износа кинематических пар
Мгновенный КПД рассмотренного шестизвенного механизма нахо-
дим по формуле:
()
..
.
пс пс
дв
пс тр
NN
N
NN
η= =
+
,
где
тр
N – в рассматриваемом положении механизма мгновенная мощ-
ность сил трения в кинематических парах 0-1, 1-2, 2-3, 3-0, 3-4, 4-5, 5-0;
0, 1, 2, 3… – номера звеньев, образующих эти кинематические пары.
Предположим, что вращательные кинематические пары
О, А, В и С
выполнены как цилиндр в цилиндре с радиусом сопрягаемой поверхности:

136
0, 01 м
ц
r =
;
материалы трущихся поверхностей выбраны таким образом, что коэффи-
циент трения между ними (сталь по стали при отсутствии смазочных мате-
риалов) составляет
0,15f =
.
Такое же значение коэффициента трения предполагаем в поступа-
тельных кинематических парах.
Тогда мгновенные мощности сил трения во вращательных кинемати-
ческих парах можно определить:
()
ij ц ij
тр ij
NPfr
=
⋅⋅ ω−ω
;
в поступательных парах:
.
ij ij
тр пост
NPfV
=
⋅⋅ ,
где
i и j – номера звеньев, образующих кинематическую пару;
ij
P – реакция между этими звеньями;
ij
ω
– относительная угловая скорость звеньев i и j ;
ij
V – относительная линейная их скорость.
По приведенным формулам вычисляем:
()
12 12 2 1
1600 0,15 0,01(2,81 10,24) 31,32 Вт;
тp ц
NPrf=ω−ω=⋅⋅ +=
()
23 23 3 2
1635 0,15 0, 01 (1,70 2,81) 11,06 Вт;
тp ц
NPrf=ω−ω=⋅⋅⋅+=
()
30 30 3
0 435 0,15 0,01 1,70 1,11 Вт;
тр ц
NPrf=ω−=⋅⋅⋅=
34 34 3 4
1425 0,15 0,1654 35,57 Вт;
тpDD
NPfV=⋅ =⋅⋅ =
()
45 45 5
0 1425 0,15 0,01 1,70 3, 63 Вт;
тp ц
NPrf=ω−=⋅⋅⋅=
50 50 50
630 0,15 0,607 57, 36 Вт,
тp
NPfV=⋅=⋅⋅ =
где
5
50 3
3
1,70 0,357 0,607 м / с
V
V
⎛⎞
=ω ⋅ = ⋅ =
⎜⎟
ω
⎝⎠
– вычислено ранее.
Мгновенная мощность сил трения:
38,3 31,32 11,06 1,11 35,57 3, 63 57,36 178,35 Вт
тp
N =+ + ++ ++ = .
Мгновенная мощность полезных сил:
.50
1600 0,607 971,2 Вт
пс р
NFV=⋅= ⋅ =
.
137
Т. о., искомый КПД:
971,2
0,845
971, 2 178,35
η= =
+
.
Аналогично можно определить КПД для других механизмов станка и
для всего станка в целом.
Можно оценить интенсивность износа кинематических пар по мощ-
ности сил трения. В примере в выбранном положении для рассмотренной
части передаточного механизма наибольшему износу подвергается посту-
пательная кинематическая пара 5-0 между резцедержателем 5 и стойкой 0:
.50 .max
57,36 Вт
Tp Tp
NN
=
= .
Для снижения среднецикловой величины износа кинематические па-
ры рекомендуется смазывать, а во вращательных парах вместо подшипни-
ков скольжения применять подшипники качения. Примеры других спосо-
бов снижения износа приведены в [7, с. 243 – 252].
4. КРАТКИЕ ВЫВОДЫ И РЕЗУЛЬТАТЫ
Выполнено первое приближение проекта строгального станка, полу-
чены ориентировочные технико-экономические показатели, которые под-
лежат защите и утверждению. Эти показатели сводятся к следующему виду:
1. Производительность (двойных ходов резца в минуту) 100
2. Средняя скорость резания (м / мин) 38,8
3. Ход резца, м 0,22
4. Поперечная подача стола (мм) 0,00085
5. Потребляемая энергия при усилии резания F
Р
= 1,6 кН
(квт
⋅час / деталь)
2,4
⋅10
-2
6. Максимальная циркулирующая энергия (квт⋅час) 6,25⋅10
-4
7. Размеры проекции минимального объема на вертикальную
плоскость (м)
0,425
⋅0,450
8. Предполагаемая масса станка, кг 400
138
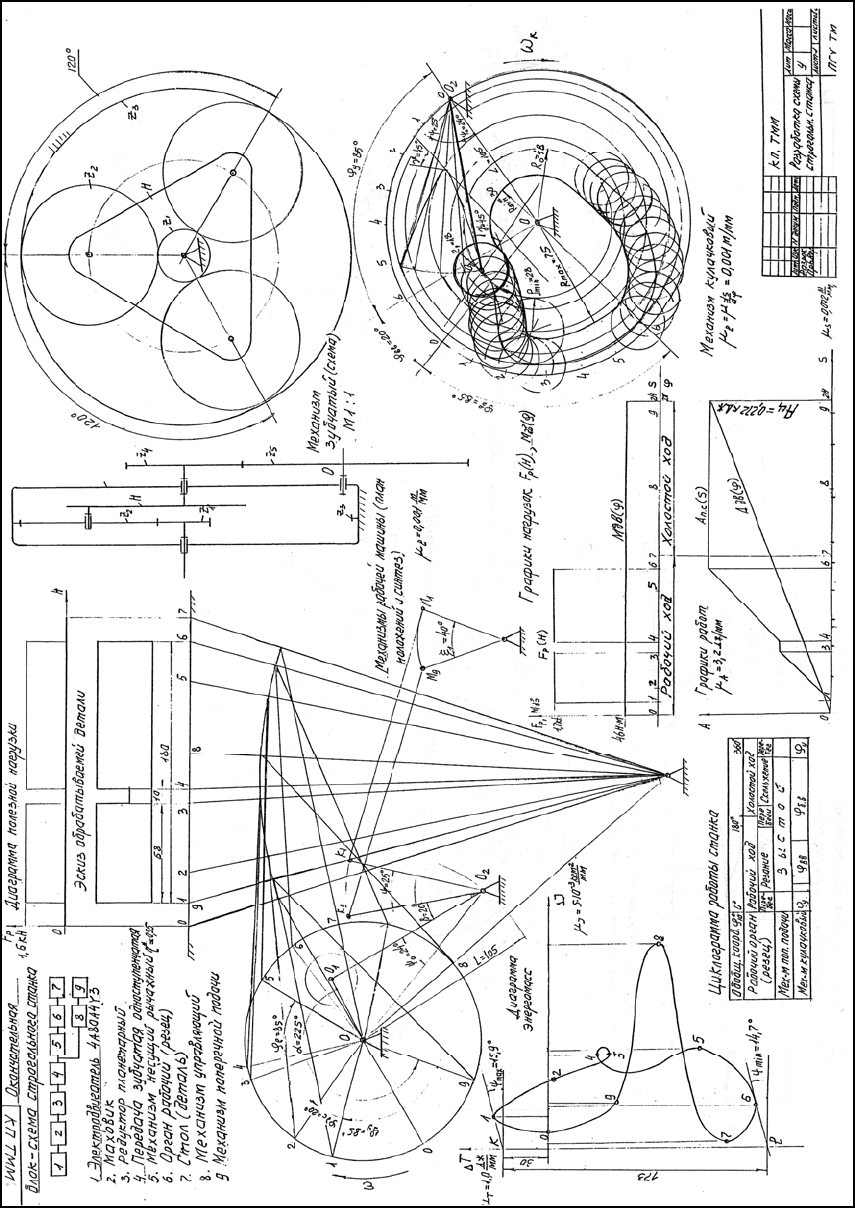
5. ГРАФИЧЕСКАЯ ЧАСТЬ
Рис. 5.1. Лист 1. Разработка схемы поперечно-строгального станка
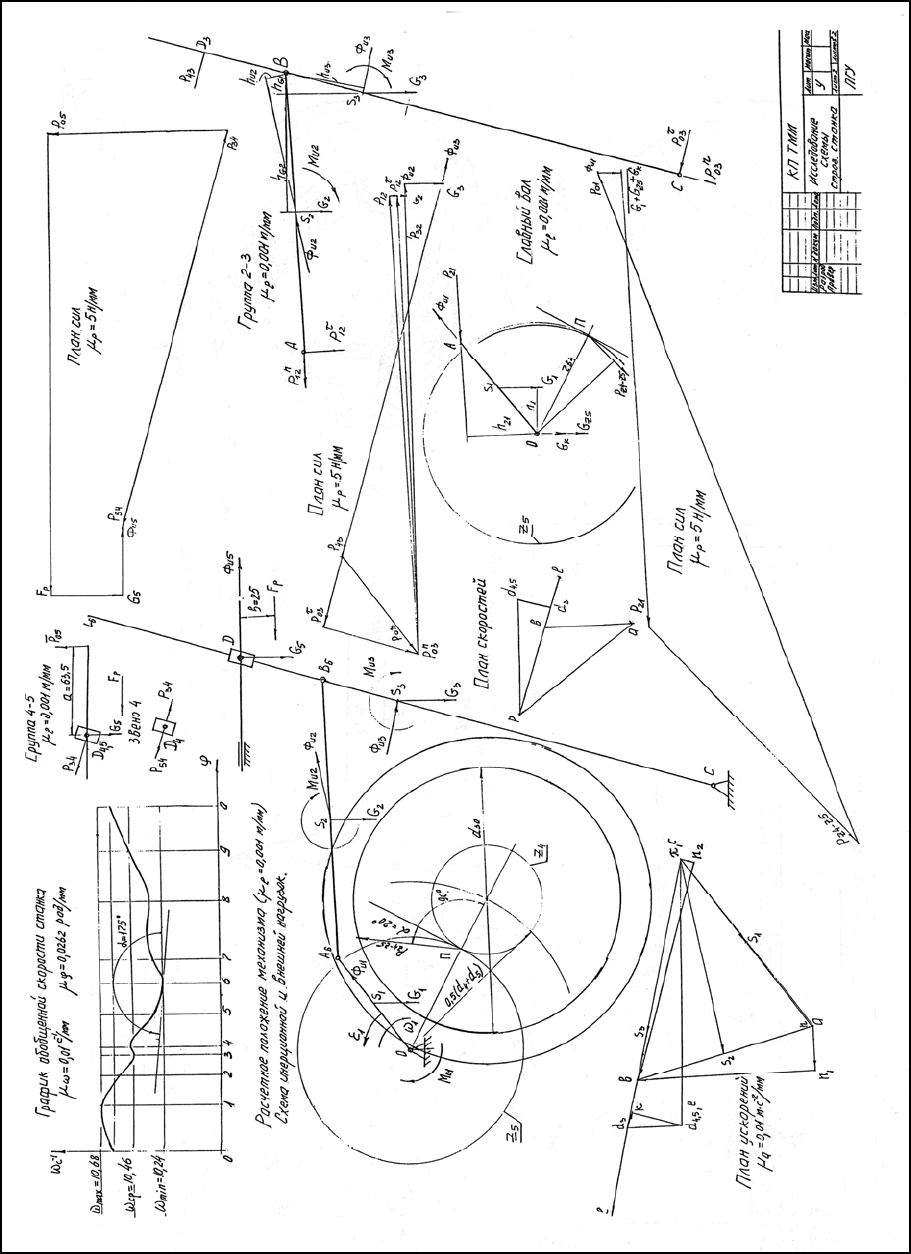
139
Рис. 5.2. Лист 2. Исследование схемы поперечно-строгального станка

140
6. ЛИТЕРАТУРА
1.
Курсовое проектирование по теории механизмов и машин / под
ред. Г. Н. Девойно, – Минск : Вышэйшая школа, 1986.
2.
Артоболевский, И. И. Теория механизмов и машин / И. И. Артобо-
левский. – М. : Наука, 1975.
3.
Касаткин, А. С. Электротехника / А. С. Касаткин, М. В. Немцов. –
М. : Энергоиздат, 198З.
4.
Двигатели переменного тока мощностью от 0,06 до 100 кВт: но-
менклатурный каталог НК 01.4.01-90. – М. : Информэлектро, 1990.
5.
Курсовое проектирование деталей машин: справ. пособие. В 2 ч. Ч. 1 /
А. В. Кузьмин, Н. Н. Макейчик [и др.]. – Минск : Вышэйшая школа, 1982.
6.
Попов, С. А. Курсовое проектирование по теории механизмов и
механике машин / С. А. Попов. – М. : Высшая школа, 1966.
7.
Теория механизмов и машин: проектирование / под ред. О. И. Куль-
бачного. – М. : Высшая школа, 1970.
8.
Теория механизмов и машин / под ред. К. В. Фролова. – М. : Выс-
шая школа, 1987.
9.
Волчкевич, П. И. Автоматы и автоматические линии. В 2 ч. Ч. 1 /
М. М. Кузнецов, В. А. Усов. – М. : Высшая школа, 1976.
10.
Тарг, С. М. Краткий курс теоретической механики / С. М. Тарг. –
М. : Наука, 1974.
11.
К определению энергоемкости сложных машин: тезисы докла-
дов РНТК, Могилев, 24 – 25 октября 1996 г. В 2 ч. Ч. I. / В. Ф. Коренский. –
Могилев, 1996.
12.
Василенко, Д. Л. Кинематика передаточного механизма /
Д. Л. Василенко // Материалы VII Республиканской научной конференции
студентов и аспирантов Беларуси, Витебск, 22 – 23 октября 2002 г. – Ви-
тебск : ВГУ, 2002.