Коренский В.Ф. Теория механизмов, машин и манипуляторов. Часть 2
Подождите немного. Документ загружается.

151
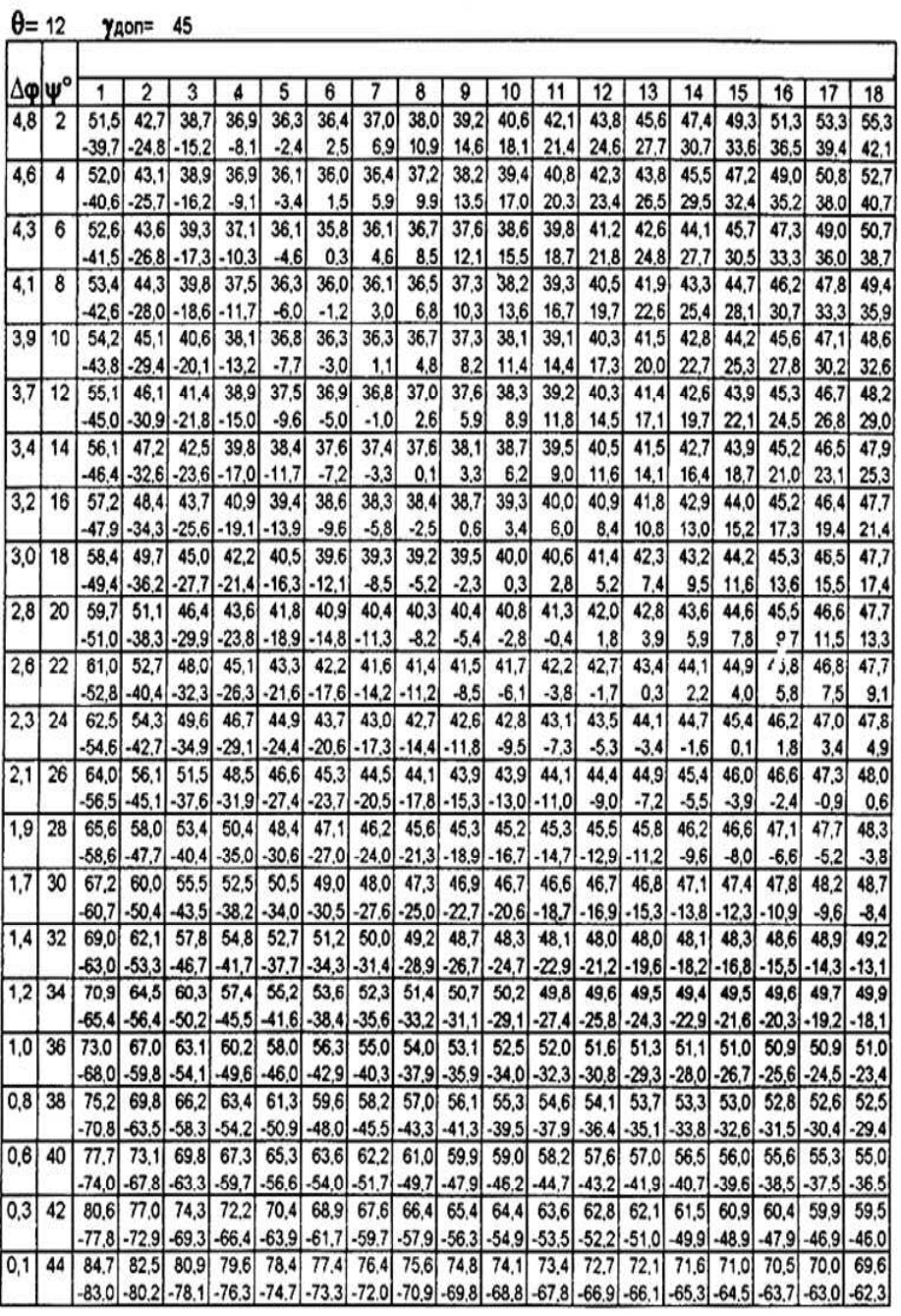
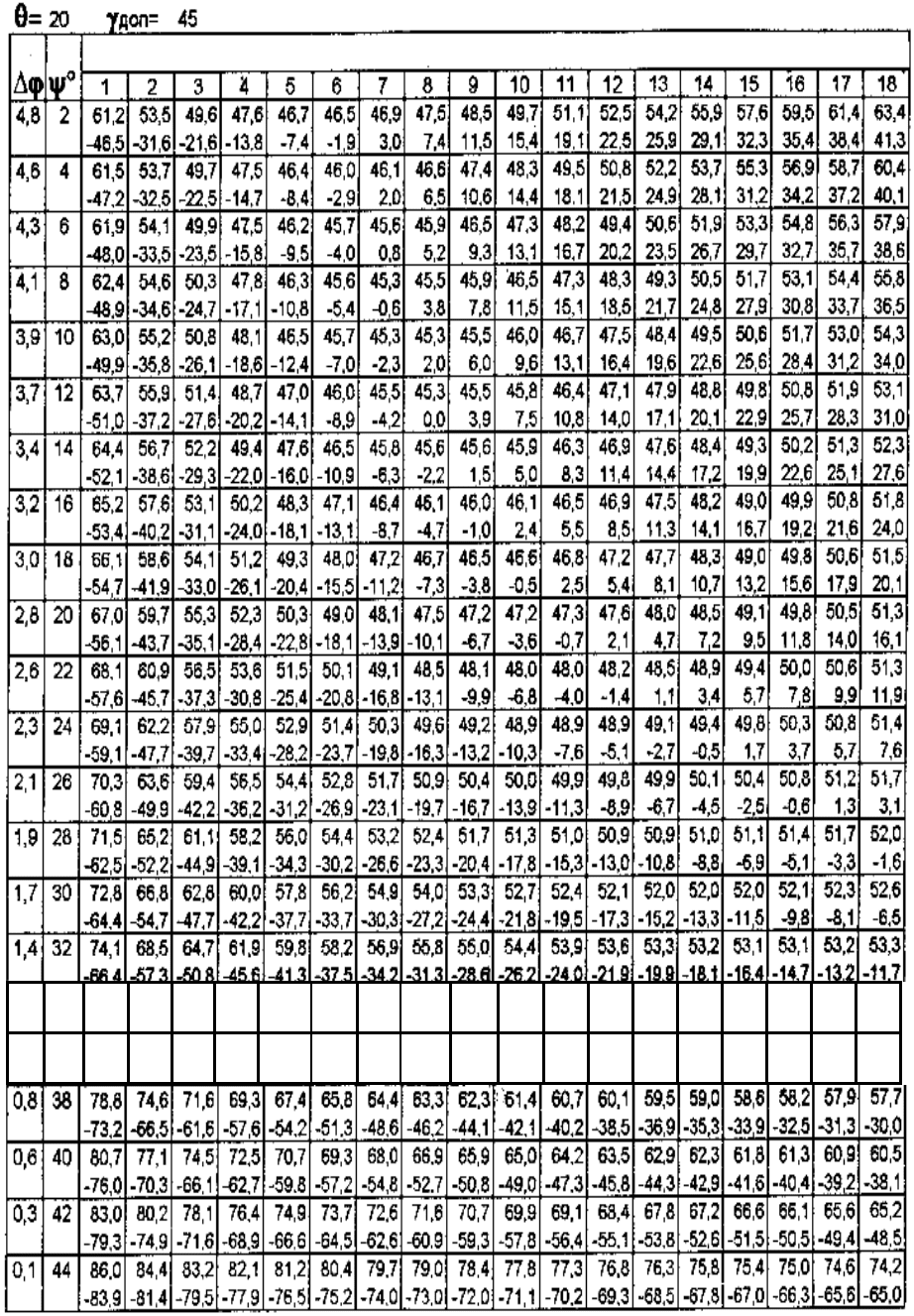
Таблица П.2.4
№№ точек на вероятностных интервалах угла φ и пределы угла давления γ
152
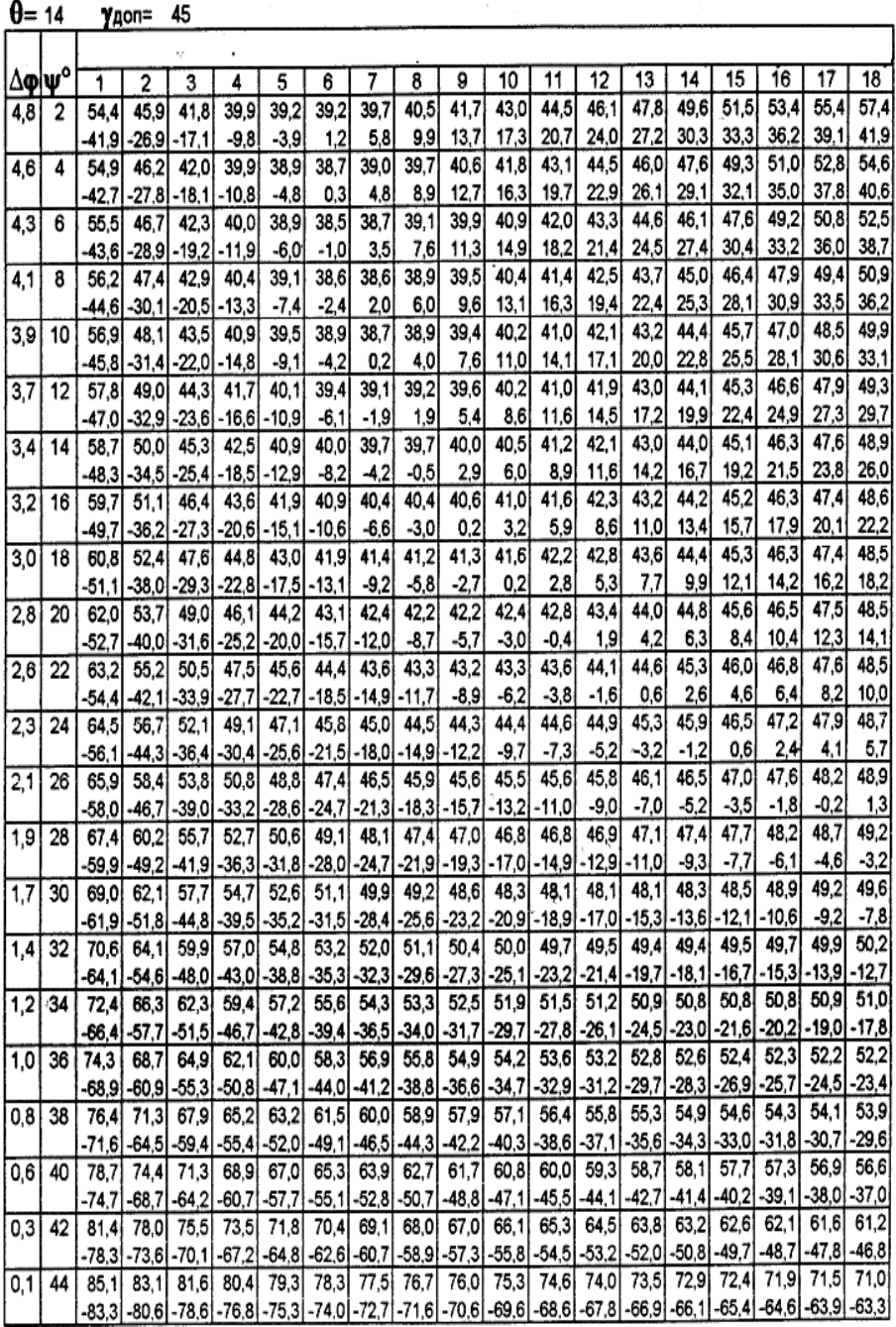
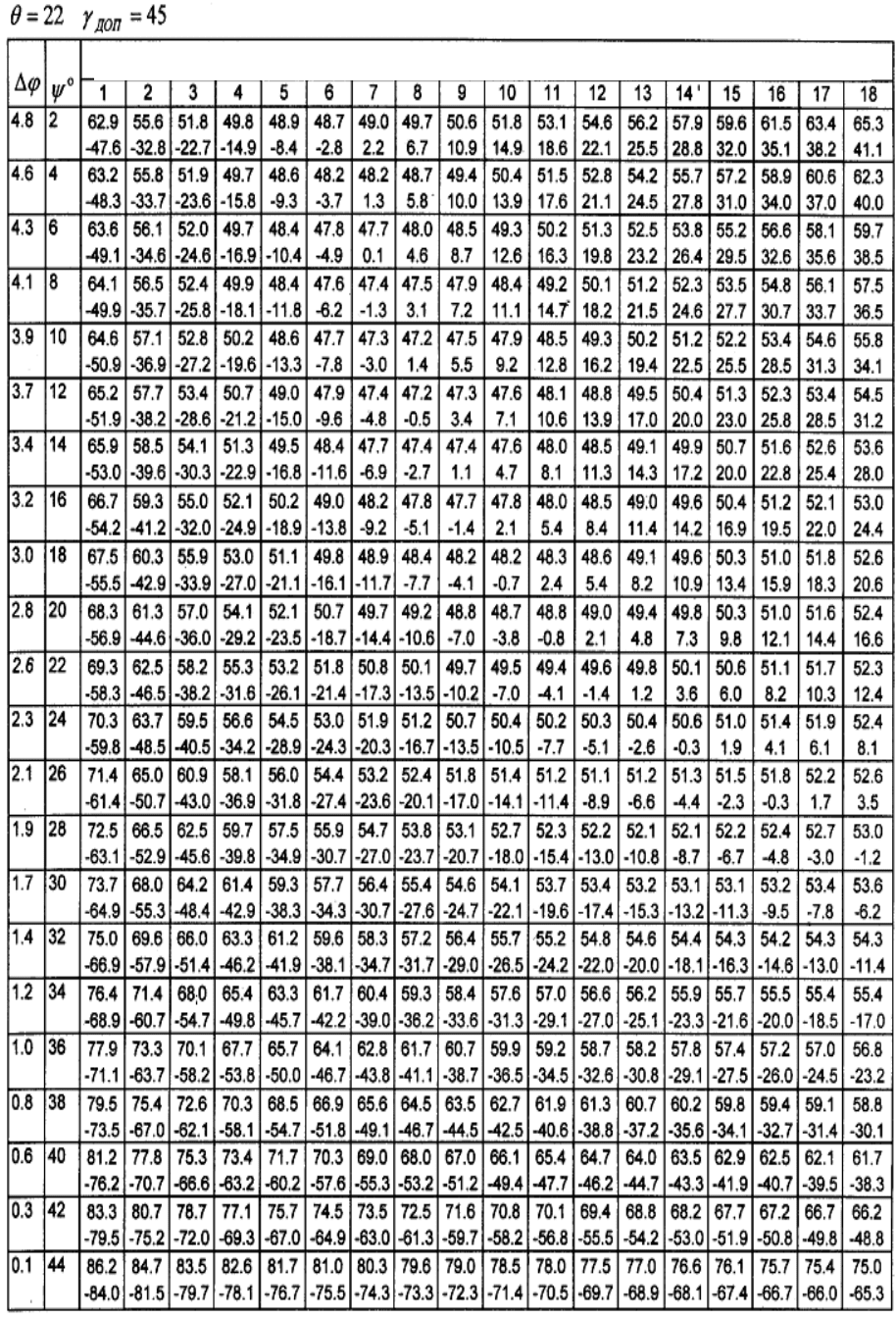
Таблица П.2.5
№№ точек на вероятностных интервалах угла φ и пределы угла давления γ
153
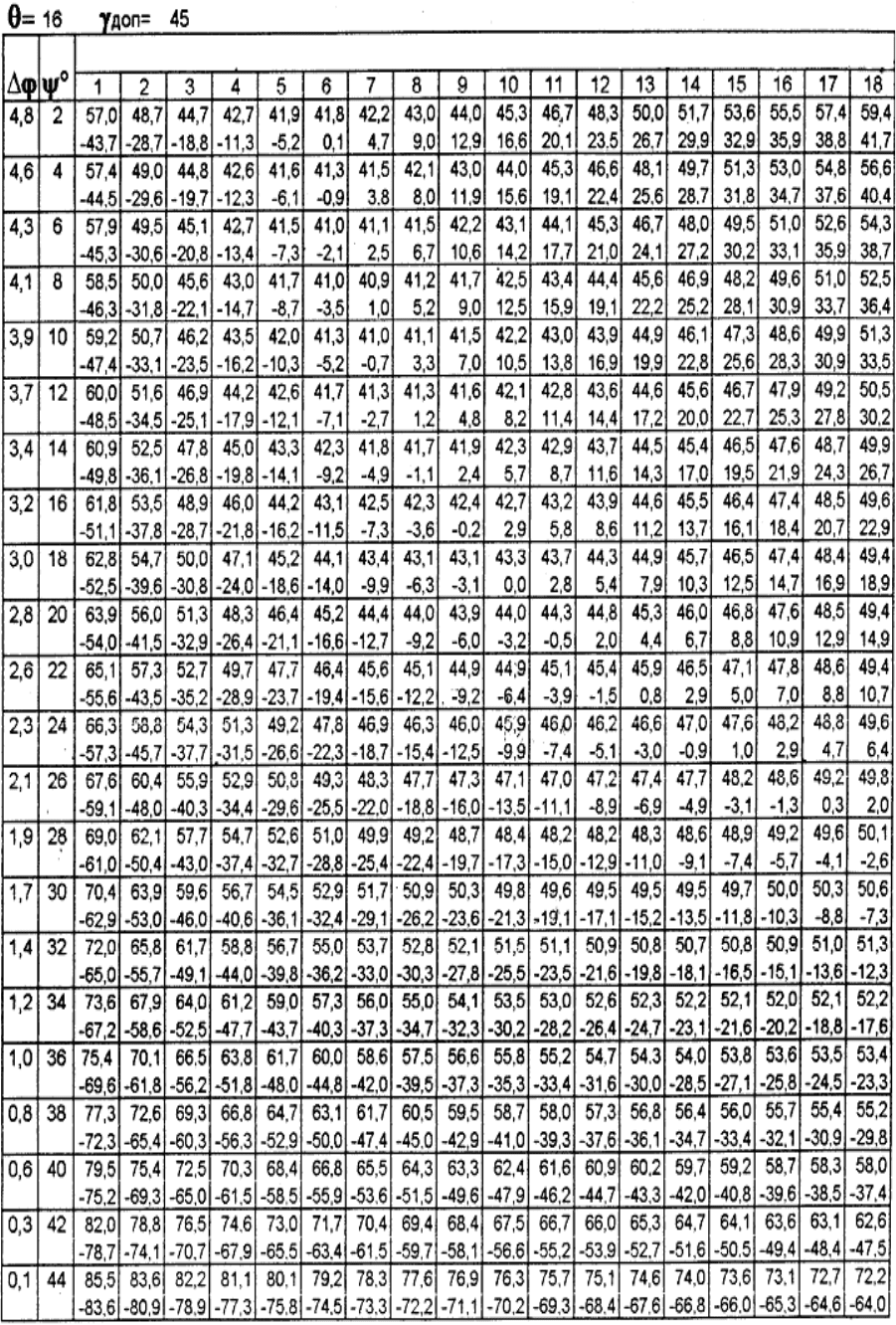
Таблица П.2.6
№№ точек на вероятностных интервалах угла φ и пределы угла давления γ
154
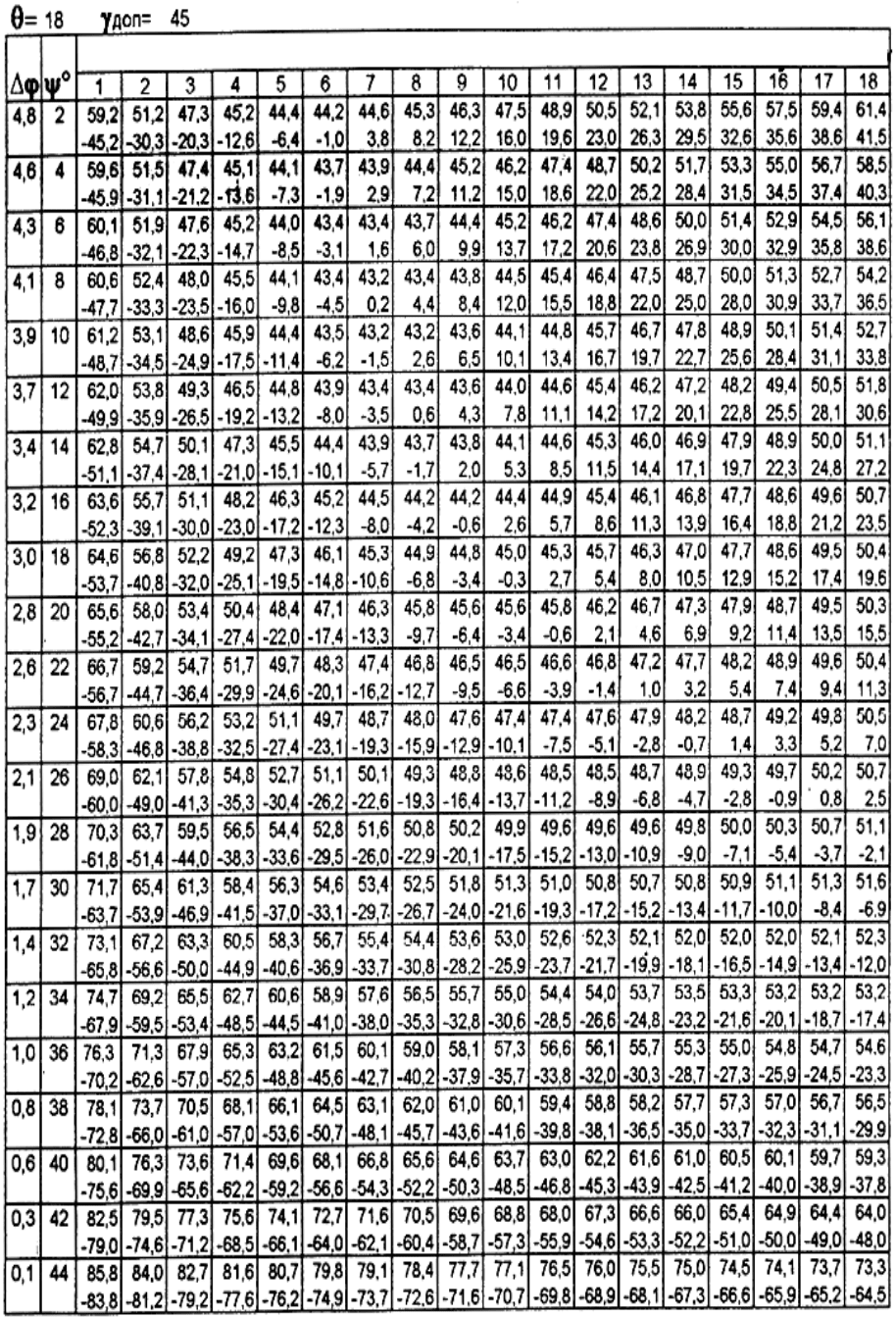
Таблица П.2.7
№ точек на вероятностныхинтервалах угла
φ
и пределы угла давл
е
ния
γ
155
Таблица П.2.8
1,2 34
75,6
-68,5
70,4
-60,1
66,8
-54,1
64,1
-49,2
62,0
-45,2
60,4
-41,7
59,0
-38,6
58,0
-35,8
57,1
-33,3
156,3
-31,0
55,8
-28,8
55,3
-26,9
55,0
-25,0
54,7
-23,3
54,5
-21,6
54,4
-20,1
54,3
-18,6
54,3
-17,2
1,0 36 77,1
-70,7
72,4
-63,2
69,1
-57,7
66,5
-53,2
64,5
-49,5
62,9
-46,2
61,5
-43,3
60,4
-40,7
59,4
-38,3
156,8
-36,2
58,0
-34,2
57,4
-32,3
57,0
-30,6
56,6
-28,9
56,3
-27,4
56,0
-25,9
55,8
-24,5
55,7
-23,2
№№ точек на вероятностных интервалах угла φ и пределы угла давления γ
156
Таблица П.2.9
№№ точек на вероятностных интервалах угла
φ
и пределы угла давл
е
ния
γ
157
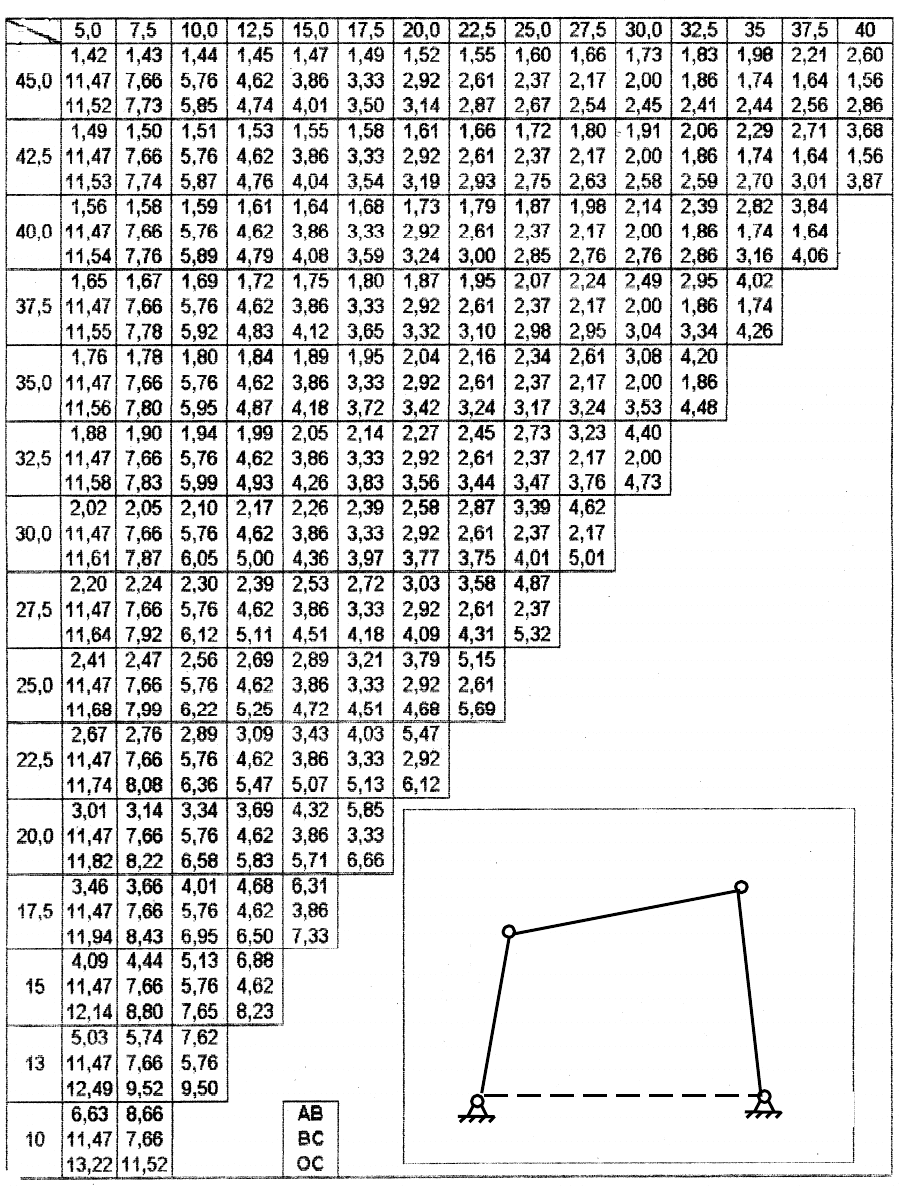
ПРИЛОЖЕНИЕ 3
Таблица выбора размеров шарнирного четырехзвенника
с нулевым углом перекрытия (
0, 1,0
ОА
θ= =
)
А
О
В
С
158
ПРИЛОЖЕНИЕ 4
КИНЕМАТИЧЕСКИЕ ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
РЫЧАЖНЫХ МЕХАНИЗМОВ
Важнейшей из задач, решаемых при разработке новых машин, явля-
ется задача определения положений звеньев механизмов и их передаточ-
ных функций.
Существующие методы определения, например, метод замкнутого
векторного контура, громоздки и ненаглядны, а распространенный гра-
фический метод планов не позволяет получать необходимую точность
либо использовать ЭВМ.
В необходимых подробностях излагаем основанный на методе пла-
нов и геометрии треугольника графоаналитический метод определения
кинематических характеристик схем рычажных механизмов II класса
∗
.
Графические построения могут выполняться для приближенной оценки
результатов на стадии обработки программ; аналитические зависимости,
вытекающие непосредственно из графических построений, позволяют
широко использовать имеющуюся у студентов программируемую вычис-
лительную технику.
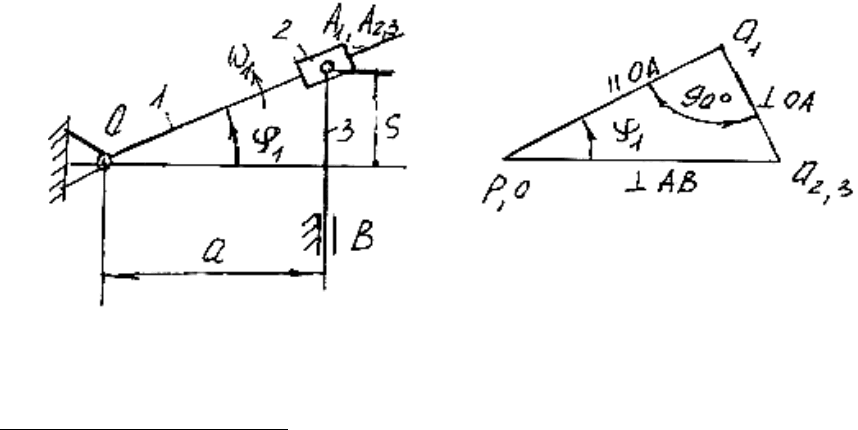
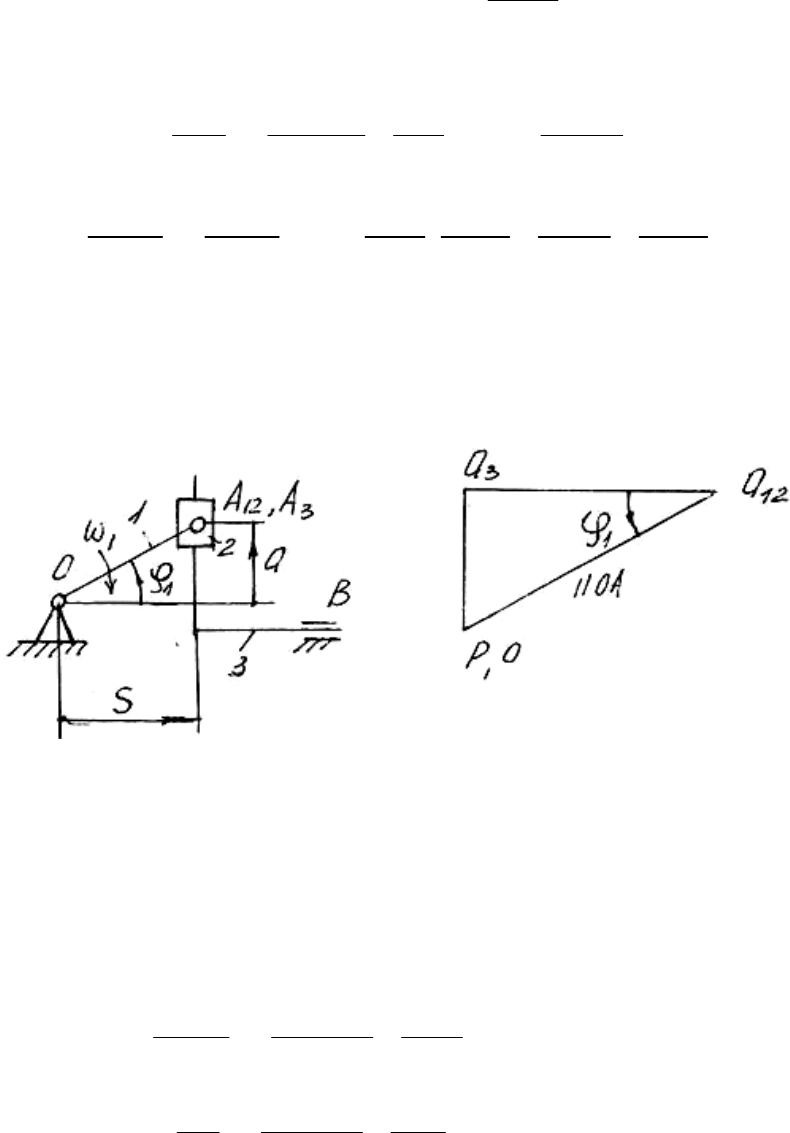
1. Для тангенсного рычажного четырехзвенного механизма (рис. П.4.1)
дано a, φ
1
. Соответственно рис. П.4.1 строим повернутый на 90
°∗
план ско-
ростей (рис. П.4.2):
Рис. П.4.1. Тангенсный рычажный Рис. П.4.2. Повернутый план скоростей
четырехзвенник
∗
По классификации И. И. Артоболевского [20].
∗
Для удобства сравнения углов на планах.
159
Из рис. П.4.1 получаем функции положения:
1
tg
S a
= ϕ
;
12
1
cos
OA
a
l =
ϕ
.
Из рис. П.4.2 находим передаточные функции:
23 23 23
12
2
1 1 1 1
1
/
cos
A A а
OA
A OA
V V P
a
l
V l pa
= = ⋅ =
ω
ϕ
;
1 23 1 23 1 23
1
1
1 1 1 1 1 1
tg
cos cos cos
A A A A
OA
A
V V a a
a a S
l
V pa
ϕ
= ⋅ = ⋅ = =
ω ϕ ϕ ϕ
.
2.
Для
синусного
рычажного
четырехзвенного
механизма
(
рис
.
П
.4.3)
дано
OA
l
,
1
ϕ
.
Соответственно
рис
.
П
.4.1
строим
повернутый
на
90
°
план
скоростей
(
рис
.
П
.4.4)
Рис. П.4.3. Синусный рычажный Рис. П.4.4. Повернутый план скоростей
четырехзвенник
Из
рис
.
П
.4.3
получаем
функции
положения
звеньев
:
1 1
sin ; cos
OA OA
a l S l
= ϕ = ϕ
.
Из
рис
.
П
.4.4
находим
передаточные
функции
:
12 3 12 3 12 3
1
1 12 12
cos
/
A A A A
OA OA
A OA
V V a a
l l
V l pa
= = ⋅ = ϕ
ω
;
3 3 3
1
1 12 12
sin
/
A A
OA OA
A OA
V V pa
l l
V l pa
= = ⋅ = ϕ
ω
.
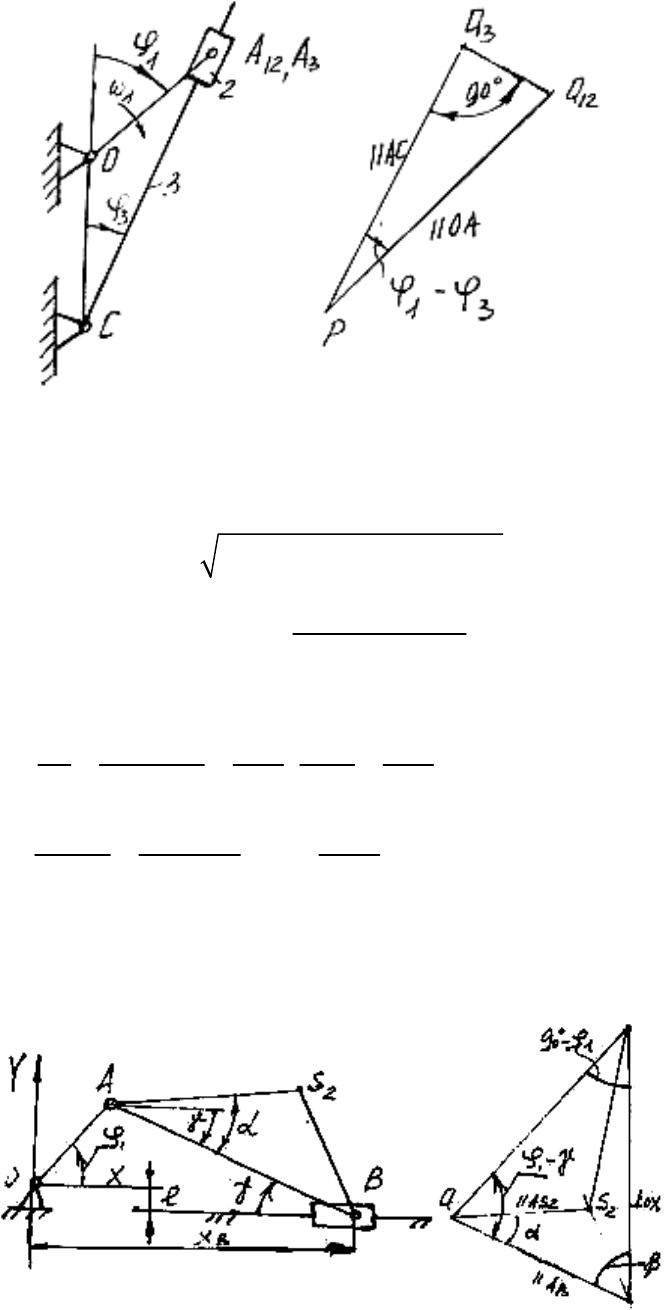
3.
Для
кулисного
рычажного
четырехзвенного
механизма
(
рис
.
П
.4.5)
дано
1
, ,
OA OC
l l
ϕ
. Соответственно рис. П.4.5 строим повернутый на 90
°
план
скоростей (рис. П.4.6):
160
Рис. П.4.5. Кулисный четырехзвенный Рис. П.4.6. Повернутый план скоростей
рычажный механизм
Из рис. П.4.5 по теореме косинусов находим:
2 2
3 1
2 cos
A C OA OC OA OC
l l l l l
= + + ϕ
;
1
3
3
cos
arccos
OC OA
A C
l l
l
+ ϕ
ϕ =
.
Из рис. П.4.6 получаем выражения передаточных функций:
( )
3 3 3 3
1 3
1 12 3 12 3
/
cos ;
/
A A C OA OA
A OA A C A C
V l l pa l
V l l pa l
ω
= = ⋅ = ⋅ ϕ −ϕ
ω
( )
12 3 12 3 12 3
1 3
1 12 12
sin .
/
A A A A
OA OA
A OA
V V a a
l l
V l pa
= = ⋅ = ⋅ ϕ −ϕ
ω
4. Для кривошипно-ползунного четырехзвенного рычажного механизма
(рис. П.4.7) дано
2
, , , , ,
OA AB AS
l l l e
α ϕ
. Соответственно рис. П.4.7 строим по-
вернутый на 90
°
план скоростей (рис. П.4.8):
Рис. П.4.7. Кривошипно-ползунный Рис. П.4.8. Повернутый план скоростей
четырехзвенный рычажный механизм