Кириченко М.Ф., Матвієнко В.Т. Аналіз та синтез керованих систем
Подождите немного. Документ загружается.

Київський університет імені Тараса Шевченка
М.Ф.Кириченко, В.Т.Матвієнко
Аналіз та синтез керованих
систем
Учбовий посібник
Київ
Видавничо-поліграфічний центр
«Київський університет»
2000
2
М.Ф.Кириченко, В.Т.Матвієнко Аналіз та синтез керованих систем: Учбовий посібник
— К.: ВПЦ «Київський унiверситет», 2000, — 53 с.
Рецензент: Ф.Г. Гаращенко, д-р техн. наук
Затверджено Радою
факультету кібернетики
30 жовтня 2000 року
© Видавничо-поліграфічний центр
«Київський унiверситет», 2000
3
Вступ
Посібник присвячений проблемі теоретичної і практичної
кібернетики – теорії синтезу та аналізу систем керування для лінійних
об'єктів з скінченновимірним простором стану.
З допомогою апарату лінійної алгебри (псевдоінверсні та проекційні
оператори) викладені основні результати теорії термінального керування,
термінального спостереження для неперервних систем та систем з
дискретним аргументом. Наводяться умови існування розв'язків даних задач.
Значну увагу присвячено обчислювальним аспектам теорії
оптимального вибору структури систем керування. Для розглядуваних задач
оптимізації, якщо розв'язок в явному виді записати не можливо, приводяться
чисельні процедури градієнтного спуску. При цьому градієтни відповідних
функціоналів виписуються в явному вигляді. Для цього активно
використовується математичний апарат збурення псевдообернених
операторів.
Так як для викладу основних теоретичних результатів з проблем
аналізу та синтезу динамічних систем використовується математичний
апарат псевдоінверсних операторів та їх збурень, то перші параграфи даного
посібника присвячені цим аспектам.
Поряд з теоретичними положеннями посібник містить приклади, які
докладно ілюструють можливості теорії при розв'язуванні конкретних задач
аналітичного конструювання модальних регуляторів.
Посібник адресований науковим співробітникам, аспірантам і
студентам старших курсів, які спеціалізуються в області дослідження та
конструювання систем керування.
4
1. Операції псевдообернення та проектування
В даному розділі даються основні поняття з класичної лінійної алгебри.
Буде дано одне з кількох визначень псевдооберненої матриці, через яку
знаходиться загальний розв’язок системи лінійних алгебраїчних рівнянь.
Також будуть наведені деякі методи обчислення псевдообернених
прямокутних матриць [1].
1.1. Псевдообернені оператори
Розглянемо систему лінійних алгебраїчних рівнянь
b
Ax
=
, (1.1)
де
nm
R
×
∈
A
, вектор
b
розмірності
m
. Систему (1.1) можна ще представити у
векторному вигляді
j
T
j
bxa =
)(
,
m
j
,
...
,
2
,
1
=
. (1.2)
Тут введені наступні позначення
( )
n
T
)(m
T
)(
T
)(
aaa
a
a
a
A ,,,
21
1
2
1
Κ
Μ
=
= .
При розв'язанні системи алгебраїчних рівнянь можливі наступні
варіанти розв'язків.
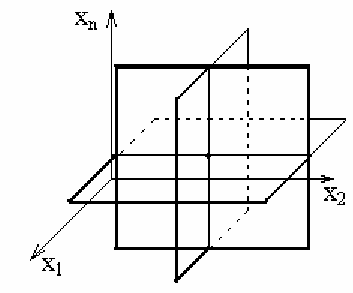
1 Існує єдиний розв'язок системи (1.1), тобто існує єдиний вектор
x
,
який задовольняє систему векторних рівнянь (1.2) (мал. 1.1).
Мал. 1.1
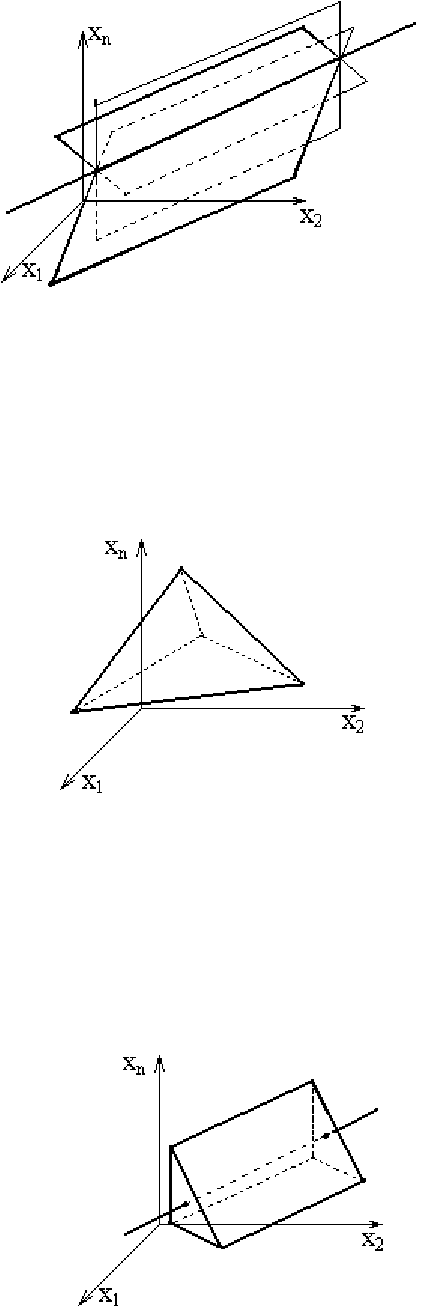
2 Існує множина розв'язків системи (1.1) (мал. 1.2).
5
Мал. 1.2
Тобто існує множина векторів
x
, які задовольняють систему (1.1).
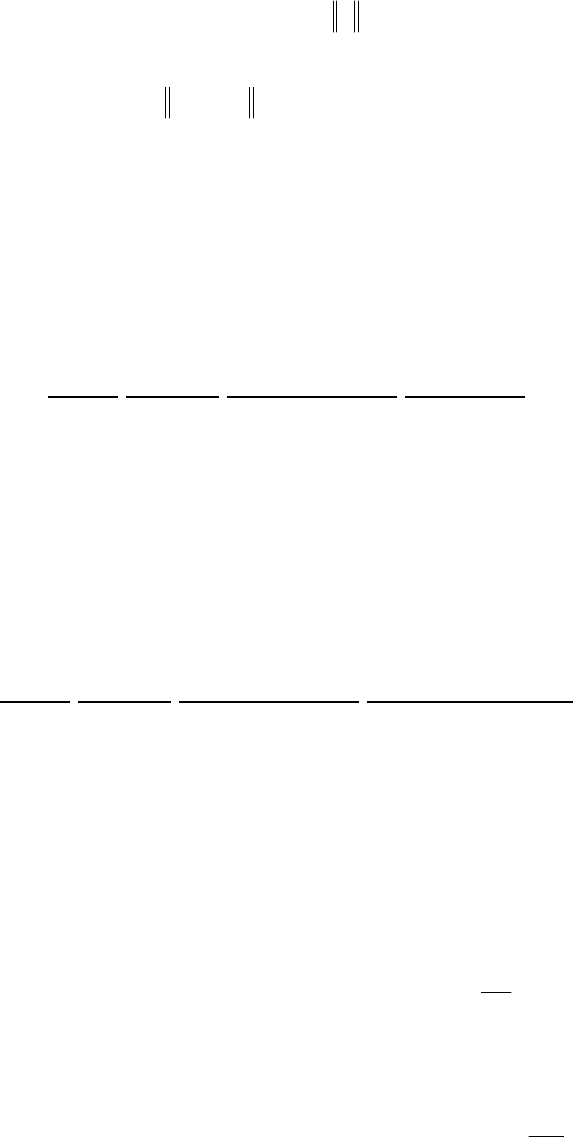
3 Розв'язку системи (1.1) не існує, але можна вказати єдиний вектор
x
ˆ
,
який буде знаходитись на найближчій відстані до всіх гіперплощин системи
(1.1) (мал. 1.3).
Мал. 1.3
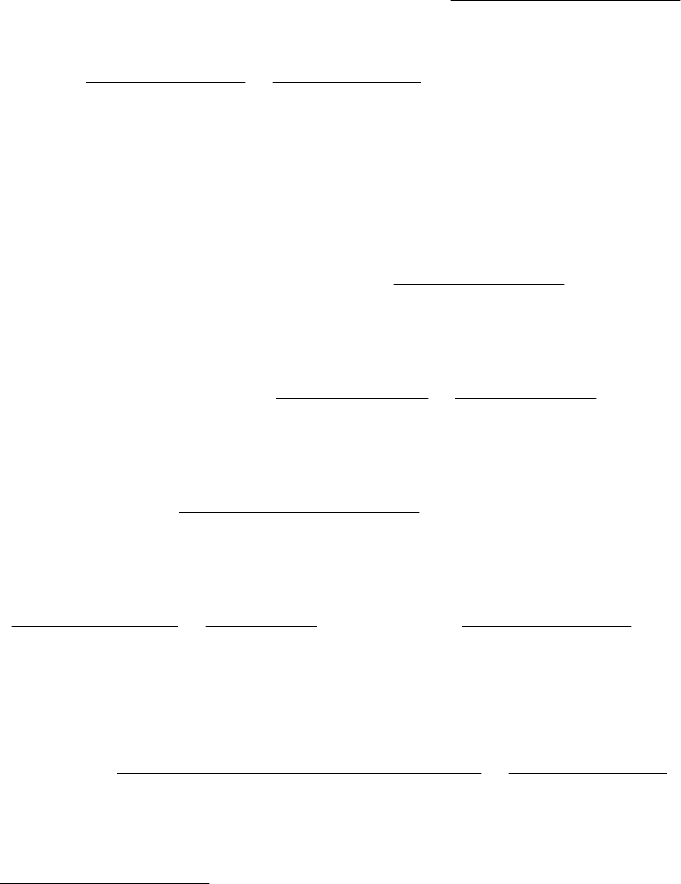
4 Розв'язку системи (1.1) не існує, але можна вказати множину векторів
x
ˆ
, які будуть знаходитись на найближчій відстані до всіх гіперплощин
системи (1.1) (мал. 1.4).
Мал. 1.4
6
Для матриці
A
розмірності
m
n
×
в полі дійсних чисел псевдо-
обернена матриця
+
A
розмірності
n
m
×
визначається наступним чином.
Для
,minarg,
)(
2
bx
m
x
R
Ω∈
+
=∈∀ xbAb
{
}
n
Rx
x
RZArg
n
∈∀+=−=Ω
+
∈
vvAbA:xbAxb ,)(min)(
2
,
де
AAIA
+
−=
n
Z )( .
1.2. Алгоритми псевдоінверсії матриць
Існує
декілька
методів
представлення
псевдооберненої
матриці
+
A
[1,
5].
Наведемо
деякі
з
них
.
1.2.1. Метод скелетизації матриць
Для
будь
-
якої
матриці
A
розмірності
n
m
×
можливий
такий
розклад
BC
A
=
,
де
r
rank
rank
rank
=
=
=
C
B
A
,
B
і
C
мають
відповідно
розмірності
n
r
r
m
×
×
,
.
Тоді
TTTT
BBBCCCA
11
)()(
−−
= .
1.2.2. Метод сингулярного представлення
Кожна прямокутна матриця
A
розмірності
m
n
×
допускає
сингулярне представлення у виді
∑
=
=
r
j
j
T
jj
1
λ
xyA
,
де
A
rank
r
=
,
j
y
- нормовані власні вектори матриці
T
AA
,тобто
,,1,,
2
rj
ijj
T
ijjj
T
===
δλ
yyyyAA
j
x
- нормовані власні вектори матриці
A
A
T
, тобто
.,1,,
2
rj
ijj
T
ijjj
T
===
δλ
xxxAxA
Псевдообернена до
A
матриця
+
A
має наступне сингулярне
представлення

7
.
1
1
∑
=
−+
=
r
j
j
T
jj
λyxA
1.2.3. Метод Мура-Пенроуза
Якщо матриця
A
розмірності
n
m
×
, то псевдообернену матрицу
можна представити наступною формулою
(
)
1
2
0
2
lim
−
→
+
+=
m
TT
IAAAA
σ
σ
.
Формулу використовують, коли m<n.
m
I
- одинична матриця
розмірності m.
(
)
T
n
T
AIAAA
1
2
0
2
lim
−
→
+
+=
σ
σ
,
Співвідношення зручніше використовувати при m>n,
n
I
- одинична
матриця розмірності n.
1.3. Проекційні оператори
Матриця
A
A
+
є проекційною, яка довільний вектор
n
R
∈
z
проектує на
лінійну оболонку, що натягнута на власні вектор-рядки матриці
A
. Справді,
∑
=
+
=
r
j
T
jj
1
xxAA .
Для будь-якого вектора
n
R
∈
z
маємо
∑
=
+
=
r
j
T
jj
1
zxxAzA , де
A
rank
r
=
.
Неважко бачити, що вектор
z
є проектується на підпростір, базисом якого є
лінійно-незалежні вектор-рядки матриці
A
.
Розглянемо тепер матрицю такого вигляду
AAIA
+
−=
n
Z )( .
Тут
n
I -
одинична
матриця
розмірності
n
n
×
.
Відомо
,
що
∑
=
=
n
j
T
jjn
1
xxI .
Тобто
,
якщо
ортонормований
базис
r
xxx ,,,
21
Κ
матриці
A
доповнити
деякими
ортонормованими
векторами
nr
xx ,...,
1+
до
повного
ортонормованого
базису
простору
n
R
.
8
Отже
∑ ∑ ∑
= = +=
=−=
n
j
r
j
n
rj
T
jj
T
jj
T
jj
Z
1 1 1
)( xxxxxxA .
Тобто
,
)
(
A
Z
-
це теж
проекційна матриця, але на ортогональне доповнення до лінійної оболонки,
натягнутої на власні вектор-рядки матриці
A
.
Крім матриці
)
(
A
Z
слід згадати про такі важливі матриці, які теж
являються проекційними
∑
+=
+
=−=
m
rj
T
jjm
T
Z
1
)( yyAAIA
– проекційна матриця на ортогональне доповнення до лінійної оболонки,
натягнутої на власні вектор-стовпчики матриці
A
.
Приведемо декілька корисних співвідношень, в справедливості
кожного з яких можна легко переконатися, записавши сингулярний розклад
матриць
+++
= AAAA ,
A
A
AA
=
+
,
TT
)()(
+++
= AAAA ,
AAAA
++
=
T
)( ,
AA =
++
)( ,
++
= AAAA
N
)( ,
AAAA
++
=
N
)( ,
)()( AA ZZ
N
= ,
+++
== )()(
TTTT
AAAAAAA .
2. Збурення псевдообернених та проекційних матриць
Метод
збурення
псевдообернених
матриць
[1]
на
основі
принципу
розщеплення
матриць
нижче
поширюється
на
проекційні
матриці
з
метою
подальшого
використання
при
розв
'
язанні
задач
ідентифікації
,
нелінійного
регресійного
аналізу
,
апроксимації
функцій
і
прогнозу
.
Відповідно
до
постановки
задачі
про
аналітичне
представлення
збурень
псевдообернених
матриць
[7, 8],
будемо
розглядати
для
деякої
довільної
матриці
nm
R
×
∈
A
її
псевдообернену
матрицю
mn
R
×+
∈
A
,
збурену
матрицю
T
abA + ,
m
R
∈a ,
n
R
∈b ,
збурену
псевдообернену
матрицю
),()( ba,AA,AabA
+++
∆+=+
T
,
збурену
проекційну
матрицю
)()()()()(
1
ba,,AA,AabAabAIabA
++
∆+=++−=+ ZZ
TT
n
T
,
а
також
наступну
проекційну
матрицю
),())()()(
2
ba,AA,(AAbaAabAabA
TTTTTT
R ∆+=++=+
++++
.
9
Функції
),( ba,AA,
T
∆ , ),(
1
ba,AA,
T
∆ , ),(
2
ba,AA,
T
∆
мають
різний
вигляд
в
залежності
від
того
,
можна
або
неможливо
представити
вектори
a
й
b
у
формі
лінійних
комбінацій
векторів
-
стовпчиків
або
,
відповідно
,
вектор
-
рядків
матриці
A
.
Розглянемо
чотири
можливих
випадки
залежності
векторів
a
і
b
від
елементів
матриці
A
.
Випадок 1.
Вектори
a
і
b
лінійно
незалежні
з
векторами
-
стовпцями
і
векторами
-
рядками
матриці
A
відповідно
,
тобто
,0)( >
aAa
TT
Z 0)( >
bAb
TT
Z . (2.1)
Тоді
залежність
),(
ba,AA,
T
∆
визначається
наступною
теоремою
.
Теорема 1. Якщо
для
матриці
mn
R
×+
∈
A
,
m
R
∈a ,
n
R
∈b ,
виконуються
умови
(2.1),
то
−
+
=−+=∆
+
++
A)babAa
aAb
AbaAAabAba,AA,
()(
1
)()()(),(
ZZ
ZZ
TTT
T
TTTT
bAb
AbbA
aAa
AaaA
)(
)(
)(
)(
TT
T
TT
TT
Z
Z
Z
Z
+
+
−− .
Використовуючи співвідношення (2.1) для функцій ),(
1
ba,AA,
T
∆ ,
),(
2
ba,AA,
T
∆ , їхній вид визначається наслідками з теореми 1.
Наслідок 1. Якщо виконуються умови теореми, то
A)bb
AbbA
AabAba,AA,
(
)()(
)()(),(
1
Z
ZZ
ZZ
T
T
TT
−=−+=∆ . (2.2)
Справедливість цього твердження прямо випливає з теореми 1. Дійсно
+
−−=++
++
++
bAb
AbbA
aAa
AaaA
AabAabA
)(
)(
)(
)(
)()(
TT
T
TT
TT
TT
Z
Z
Z
Z
]
=+
+
+
+
)(
)()(
1
)()(
T
TTTT
T
TT
ZZ
ZZ abA
bAbaAa
aAb
AbaA
A)bb
AA)bb
AAI
A)bb
A)bb
A)bb
AAA)bb
AA
(
)((
(
(
(
(
Z
ZZ
Z
Z
Z
Z
T
T
n
T
T
T
T
+=+−=
+
+
+
.
Наслідок 2. Якщо виконуються умови теореми 1, то
−+
+
−=∆
+
+
aAa
AaaA
A)bb
AbbAAbbA
Aba,AA,
)(
)(
(
)()()()(
),(
2
TT
TT
T
TT
T
ZZ
ZRRZ
( )
++
+
−
++
+
)())((
()(
1
AabAAA)ba
A)baAa
aAb
ZZ
ZbZ
TTT
TTT
T
10
( )
)((
()(
)1()()(
2
2
AA)bb
A)bbaAa
aAbaAbaAb
ZZ
ZZ
ZR
T
TTT
TTTT +
++
+
. (2.3)
Наслідок 3. Якщо виконуються умови теореми 1 і
2
)( aaAa =
TT
Z ,
2
( bA)bb =Z
T
,
тобто, вектор
a
є ортогональним до усіх векторів-стовпців матриці
A
, а
вектор
b
– до всіх вектор-рядкам матриці
A
, то
42
2
),(
ba
bb
ba,AA,
T
=∆
+
. (2.4)
Справедливість
твердження
наслідку
3
випливає
з
формули
(2.3)
і
співвідношень
0
=
+
aA , 0)( =
+
bA
T
, 0( =A)bb R
T
.
Випадок
2.
Вектор
a
є
лінійно
залежним
від
вектор
-
стовпців
матриці
A
,
а
вектор
b
–
лінійно
незалежним
від
вектор
-
рядків
матриці
A
,
тобто
0)( =aAa
TT
Z , 0)( >bb AZ
T
. (2.5)
Тут
має
місце
наступна
теорема
[8].
Теорема
2.
Якщо
для
матриці
nm
R
×
∈A ,
m
R
∈a ,
n
R
∈b
виконуються
умови
(2.5),
то
( )
+++
−
+
+
+
−
−
−=∆ A
aA)bb
A)ba
a
aa
IA
A)bb
A)bb
Iba,AA,
222
1(
(
1
(
(
),(
Z
Z
Z
Z
k
kk
I
T
TT
m
T
T
n
T
n
(2.6)
де
(
)
aAb
A)bb
A)b
aA
++
+−=
T
T
Z
Z
k 1
(
(
.
Наслідок
4.
Якщо
виконуються
умови
теореми
2
і
вектор
b
є
ортогональним
до
вектор
-
рядків
матриці
A
,
тобто
2
( bA)bb =Z
T
,
то
++
−=∆ Aba,AA,
2
),(
k
kk
T
, (2.7)
де
2
b
b
aA −=
+
k
. (2.8)
Наслідок
5.
Якщо
мають
місце
умови
наслідку
4,
то
22
1
)(
k
kk
TT
+−=∆
+
b
bb
ba,,AA, , (2.9)
де
k
визначається
по
формулі
(2.8).
Доведення
наслідку
(5)
випливає
з
наступних
співвідношень
( ) ( ) ( )
=+
−=++
+
+
T
T
n
TT
k
kk
abAAIabAabA
2