King M.R., Mody N.A. Numerical and Statistical Methods for Bioengineering: Applications in MATLAB
Подождите немного. Документ загружается.

44
H = [0.5; 0.55; 0.6; 0.65; 0.7];
44
A = [H.^2 H ones(size(H))];
44
alpha = [10.5; 10.0; 8.5; 7.0; 4.5];
44
c=(A’*A)\(A’*alpha)
MATLAB outputs
c=
−114.2857
107.1429
−14.4714
Now we determine the coefficient of determination:
44
alphabar = mean(alpha)
alphabar =
8.1000
44
alphahat = polyval(c,H)
alphahat =
10.5286
9.8857
8.6714
6.8857
4.5286
44
SSR = sum((alpha-alphahat).^2)
SSR =
0.0571
44
R2 = 1 – SSR/sum((alpha-alphabar).^2)
R2 =
0.9976
This value of R
2
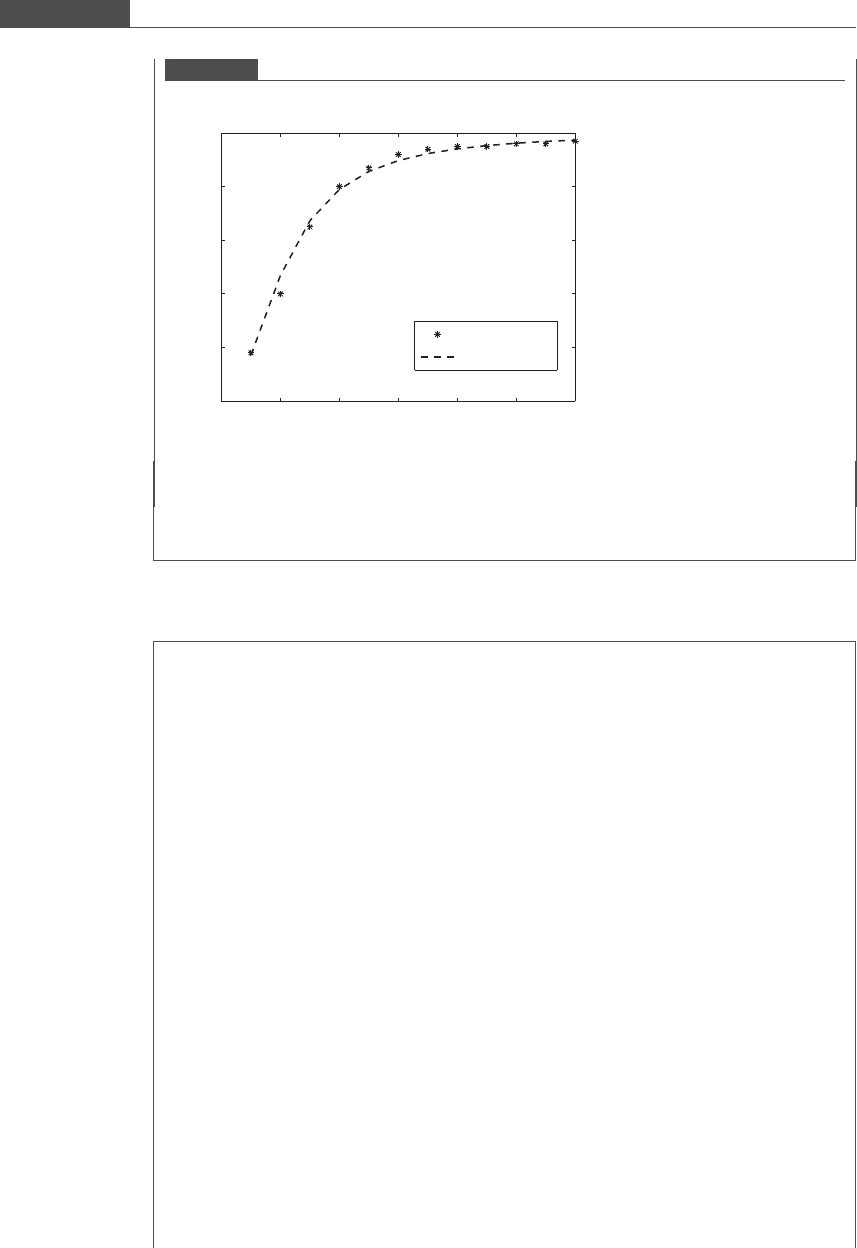
tells us that the quadratic fit accounts for 99.76% of the variation in the data. The
remaining 0.34% is assumed to be due to errors in obtaining the data, inherent variability in the data, or
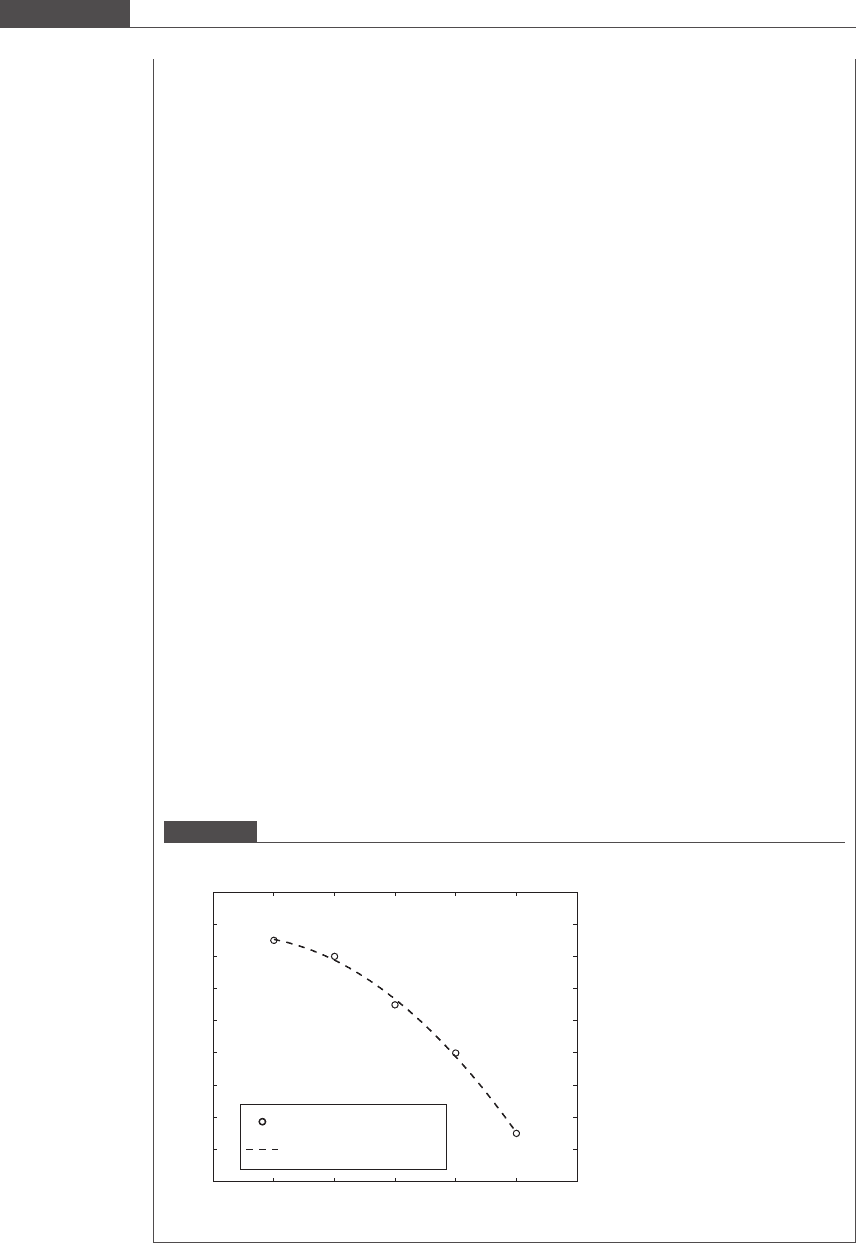
due to higher-order dependencies. The fitted quadratic curve is plotted in Figure 2.11 along with the
data points to inspect the quality of the fit.
Figure 2.11
Transition from gliding to rotating motion. Quadratic curve fitted to data points (H, α
crit
).
0.45 0.5 0.55 0.6 0.65 0.7 0.75
3
4
5
6
7
8
9
10
11
12
Initial y-axis tilt, α
crit
(degrees)
Initial height H of platelet centroid (μm)
Data points, α
crit
Fitted quadratic curve
117
2.9 Curve fitting using linear least-squares method
It is a good idea to plot the residuals with respect to the independent variable and
visually inspect the residual plot to see if there is any observabl e trend in the
unexplained error. If the distribution of the residuals about zero appears to be
entirely random, then a trend in the residual error does not exist and the variations
in the data are approximately random (errors or fluctuations are usually assumed to
be normally distributed; see Chapter 3). If a distinct trend is noticeable in the residual
values with respect to the independent variable, this suggests that the model is
incomplete and does not fully account for the observed trend in the data.
Note on the MATLAB backslash ( \) operator
The MATLAB backslash operator can solve overdetermined linear equations
Ac = y in which the number of equations m is greater than the number of variables
n. One simply needs to type
c = A\y
to obtain the least-squares fit. MATLAB does not employ the normal equations
discussed in this chapter, but uses another method called QR factorization with
pivoting. QR factorization expresses the coefficient matrix A as a product of two
matrices: an orthogonal matrix and an upper triangular matrix. Either method will,
under usual circumstances, produce the same result. The methods differ in terms of (i)
computational efficiency and (ii) stability in the face of minor fluctuations in data
values (conditioning of the system). An analysis of the differences between various
methods employed for linear least-squares regression can be found in Demmel (1997).
2.10 Linear least-squares approximation of transformed equations
In the problems described in Boxes 2.2 and 2.3, the dependent variable does not have
a linear relationship with the undetermined coefficients. In both cases, the nonlinear
equation is amenable to rearrangement such that the new form of the equation is a
straight line. These nonlinear equations are said to be transformed to a linear
equation. Such transformed equations have a linear relationship with respect to
their undetermined coefficients, and can therefore be fitted to data sets using the
linear least-squares method of regression. For example, many natural phenomena,
such as radioactive decay, population growth, chemical reaction rate, and forward/
backward chemical rate constants, exhibit an exponential dependence on some
factor or environmental condition (temperature, concentrations of chemicals etc.).
A nonlinear exponential dependency of m on t such as
m ¼ m
0
e
kt
is linearized by taking the natural logarithm of both sides:
ln m ¼ ln m
0
kt:
The dependency of ln m on t is linear, and a straight line can be used to approximate
data that can be described by such a relationship. The linear least-squares line
estimates the two constants, m
0
and k, that characterize the process. If we make
the following substitutions:
y ¼ ln m; x ¼ t; β
1
¼k; β
0
¼ ln m
0
;
118
Systems of linear equations
then the model simplifies to y ¼ β
1
x þ β
0
. The data points used to obtain a best-fit
line that approximates the data are (x
i
, y
i
)or(t,lnm). The linear least-squares
technique calculates values of β
0
and β
1
that represent the best line fit to data points
(ln m, t) and not (m, t). Therefore, it is important to keep in mind that a best-fit
solution for the transformed data may not be as good a fit for the original data. That
is why it is important to extract the constants m
0
and k from β
0
and β
1
and determine
the errors in the approximation with respect to the original data. Plotting the
original data and the fitted curve to check the accuracy of the fit is recommended.
Table 2.5 contains several additional examples of commonly encountered forms of
nonlinear equations and strategies to linearize them.
Table 2.5. Examples of nonlinear equations that can be linearized
Nonlinear
equation
Transformed equation
of form y ¼ a
1
x þ a
0
Transformed data
points
Transformed
coefficients
m ¼ m
0
t
k
(power-law
model)
ln m ¼ k ln t þ ln m
0
y ¼ ln m; x ¼ ln t β
1
¼ k; β
0
¼ ln m
0
m ¼ m
0
10
kt
log m ¼ kt þ log m
0
y ¼ log m; x ¼ t β
1
¼ k; β
0
¼ log m
0
m ¼ m
0
1
k þ t
1
m
¼
t
m
0
þ
k
m
0
y ¼
1
m
; x ¼ t β
1
¼
1
m
0
; β
0
¼
k
m
0
m ¼ m
0
t
k þ t
1
m
¼
k
m
0
t
þ
1
m
0
y ¼
1
m
; x ¼
1
t
β
1
¼
k
m
0
; β
0
¼
1
m
0
Box 2.2B Using hemoglobin as a blood substitute: hemoglobin–oxygen binding
We seek the best-fit values for the coefficients P
50
and n using the transformed linear equation
ln
S
1 S
¼ n ln pO
2
ðÞn ln P
50
: (2:28)
Let
y ¼ ln
S
1 S
; x ¼ ln pO
2
ðÞ; β
1
¼ n; and β
0
¼n ln P
50
:
Equation (2.28) is rewritten as
y ¼ β
1
x þ β
0
:
Table 2.1 provides the data points (pO
2
, S), where pO
2
is given in units of mm Hg. At the command
line, we create the two variables x and y. Note that in MATLAB the log function calculates the natural
logarithm of a scalar or the individual terms in a vector.
44
pO2 = [10:10:120]’;
44
x = log(pO2);
44
S = [0.18; 0.40; 0.65; 0.80; 0.87; 0.92; 0.94; 0.95; 0.95;
0.96; 0.96; 0.97];
44
y = log(S./(1-S));
119
2.10 Linear least-squares approximation of transformed equations
The matrix A for this problem is
44
A = [x ones(size(x))];
The normal system is solved as shown below.
44
c=(A’*A)\A’*y
c=
2.0906
−6.3877
Matrix c ¼
β
1
β
0
and the model coefficients are extracted from c as follows:
44
n = c(1)
n=
2.0906
44
P50 = exp(-c(2)/n)
P50 =
21.2297
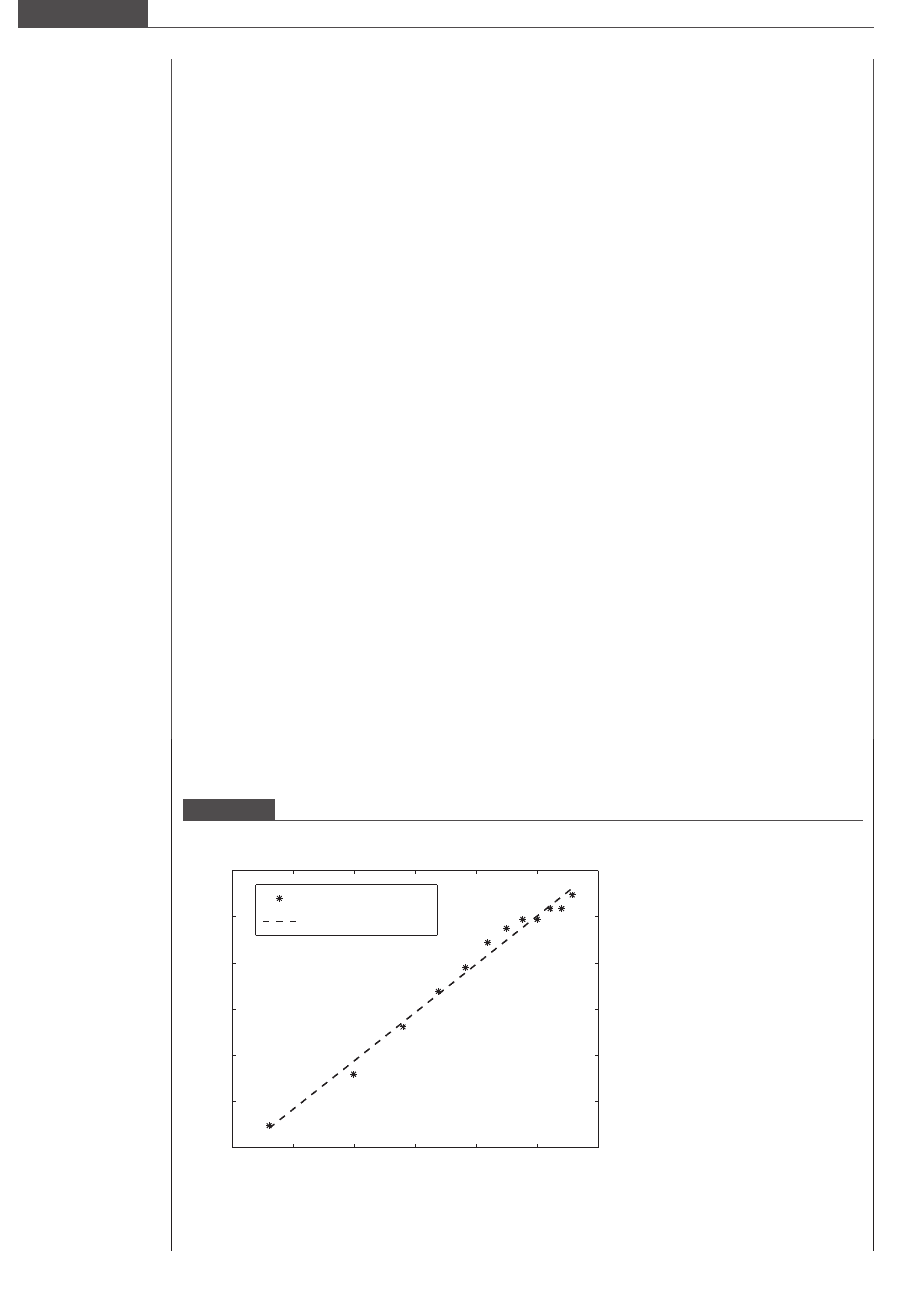
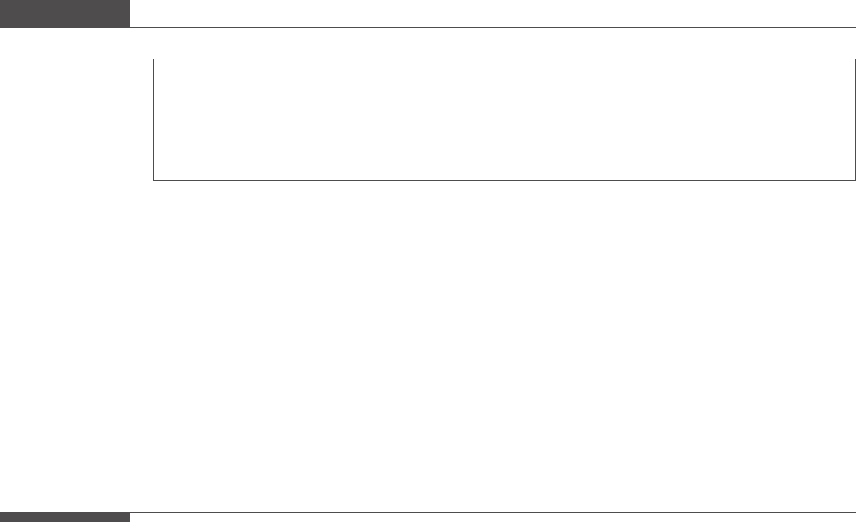
The x, y data are plotted in Figures 2.12 and 2.13 to check the fit. The code is presented below:
yhat = A*c;
plot(x,y,‘k*’,x,yhat,‘k–’,‘LineWidth’,2)
set(gca,‘FontSize’,16,‘LineWidth’,2)
xlabel(‘log({\itp}O_2)’)
ylabel(‘log({\itS}/(1-{\itS})’)
legend(‘transformed data’,‘fitted line’)
S_hat = (pO2.^n)./(P50^n+(pO2.^n));
plot(pO2, S, ‘k*’,pO2,S_hat,‘k–’,‘LineWidth’,2)
set(gca,‘FontSize’,16,‘LineWidth’,2)
xlabel(‘{\itp}O_2 in mmHg’)
ylabel(‘{\itS}’)
legend(‘original data’,‘fitted line’)
Figure 2.12
Transformed oxygen dissociation curve.
2 2.5 3 3.5 4 4.5 5
−2
−1
0
1
2
3
4
log(pO
2
)
log(S/(1−S)
Transformed data
Fitted line
120
Systems of linear equations
The typical P
50
value for human hemoglobin in blood is 26 mm Hg (Imai et al., 2001). The P
50
value
for tetrameric bovine hemoglobin is lower than that for the normal case, indicating higher affinity of
bovine hemoglobin for oxygen. Such values are typically found in diseased (hemoglobinopathic)
conditions and may not be suitable for in vivo use as a blood substitute (Imai et al., 2001).
Figure 2.13
Original oxygen dissociation curve with model prediction.
0 20 40 60 80 100 120
0
0.2
0.4
0.6
0.8
1
pO
2
(mmHg)
S
Original data
Fitted line
Box 2.3B Time course of drug concentration in the body
The transformed linear equation that we use to determine the “best-fit” values for the coefficients C
0
and
k is as follows:
ln CtðÞ¼ln C
0
kt: (2:30)
Let y ¼ ln C, x ¼ t, β
1
¼k, and β
0
¼ ln C
0
. Equation (2.30) is rewritten as
y ¼ β
1
x þ β
0
:
Table 2.2 lists the data points (t,lnC
v
) and (t,lnC
a
). In a script file, we create three variables x, y
v
, and y
a
as shown below. Equation (2.30) is not defined for C
v
or C
a
= 0 and therefore we do not include the zero
concentration data points.
t = [1 2 3 8 16 24 48]’;
Cv = [18.912 13.702 7.406 2.351 0.292]’;
Ca = [0.240 0.187 0.127]’;
x = t; yv = log(Cv); ya = log(Ca);
For the linear equation y ¼ β
1
x þ β
0
, the matrix A is given by
A = [x ones(size(x))];
Av = A(1:length(Cv),:);
Aa = A(1:length(Ca),:);
The normal system is solved as follows:
cv = (Av’*Av)\(Av’*yv);
ca = (Aa’*Aa)\(Aa’*ya);
121
2.10 Linear least-squares approximation of transformed equations
Since c ¼
β
1
β
0
, the model coefficients are extracted as shown below:
kv = − cv(1)
C0v = exp(cv(2))
ka = − ca(1)
C0a=exp(ca(2))
The MATLAB output of the script is
kv =
0.2713
C0v =
21.4204
ka =
0.3182
C0a =
0.3376
To determine whether the drug clearance rates k are similar or different for the vitreous and aqueous
humor, we would need to carry out a hypothesis test. Hypothesis tests are statistical tests that determine
with some confidence level (probability) if the apparent differences between two means (or parameters)
obtained from two distinct samples are due to chance or whether they actually signify a legitimate
difference in the populations from which the samples have been derived (see Chapter 4). The transformed
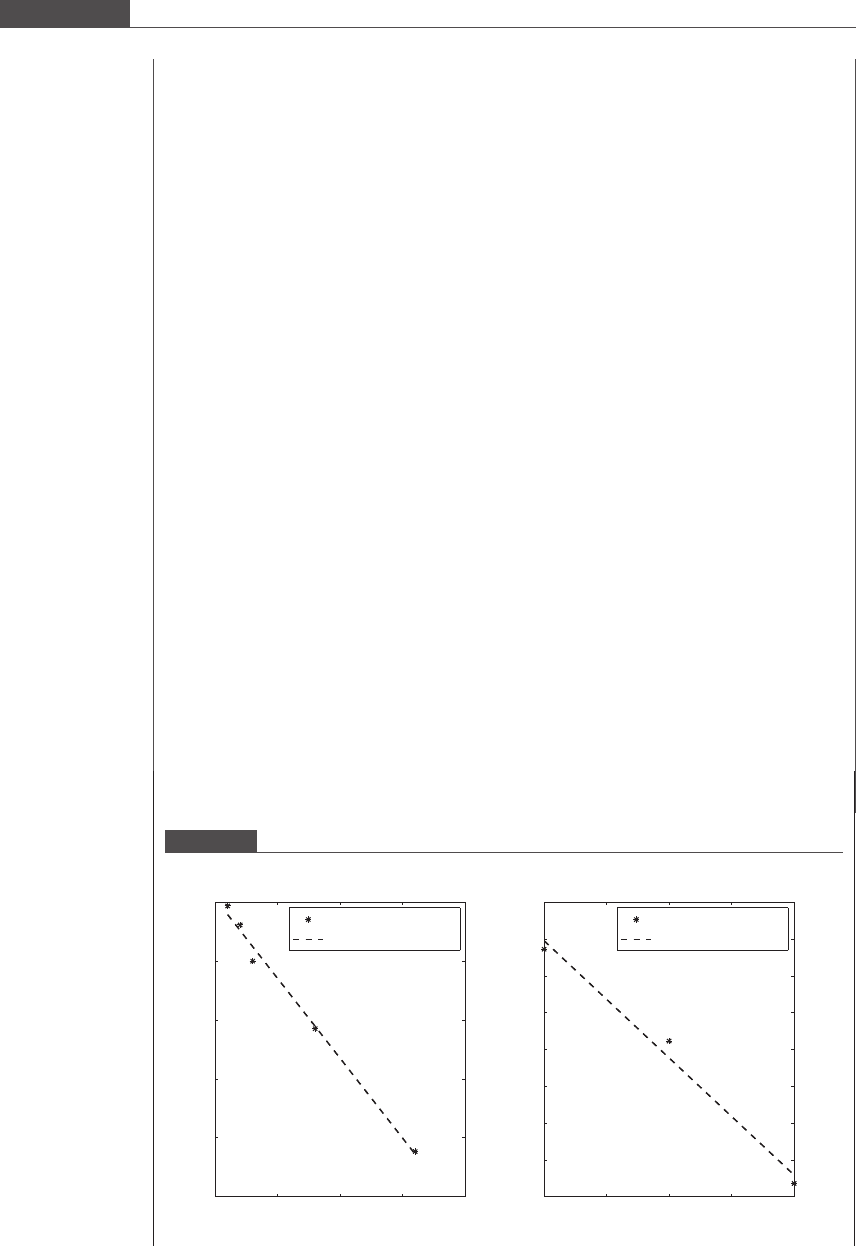
data points and the best-fit models are plotted in Figure 2.14 and the relevant code of the script is
presented below.
% Plotting least-squares fit for drug elimination from the Vitreous
subplot(1,2,1)
plot(x(1:length(Cv)),yv,‘k*’,x(1:length(Cv)),Av*cv,‘k–’, ...
‘LineWidth’,2)
xlabel(‘{\it t} in hours’)
ylabel(‘log({\itC_v})’)
legend(‘transformed data’,‘best-fit model’)
% Plotting least-squares fit for drug elimination from the Aqueous
subplot(1,2,2)
Figure 2.14
Drug elimination profile using transformed coordinates.
0 5 10 15 20
−2
−1
0
1
2
3
t (hours)
log(C
v
)
Transformed data
Best−fit model
1 1.5 2 2.5 3
−2.1
−2
−1.9
−1.8
−1.7
−1.6
−1.5
−1.4
−1.3
t (hours)
log(C
a
)
Transformed data
Best−fit model
122
Systems of linear equations
Exponential, power-law, logarithmic, and rational functions are all subject to
certain specific limitations in the data, such as:
*
a reciprocal function in 1/t cannot include the point t =0;
*
logarithmic functions in x are valid strictly for x >0;
*
an exponential function in y does not allow a sign change in y.
Polynomial functions are, on the other hand, more flexible and do not have such
limitations. These are important limitations to keep in mind when selecting a fitting
function.
2.11 Multivariable linear least-squares regression
At times, we may model the simultaneous dependency of one variable on two or
more independent variables. Equation (2.31) is an example of the linear dependency
of y on more than one independent variable. Of course, the dependency need not be
linear for any physical, chemical, or biological process, and linear least-squares
regression can still be applicable in many cases. For example, the biochemical
reaction below states that enzyme E must combine with substrates A and B in
order to catalyze the irreversible reaction to form product P:
E þ aA þ bB ! E þ P:
An example of an enzyme reaction that acts on two substrates is L-asparagine
hydrolysis, which is catalyzed by the enzyme L-asparaginase via the deamination
reaction
L-asparagine þ H
2
! L-aspartate þ NH
3
:
Normal cells are capable of synthesizing asparagine, whereas certain leukemia
cells are unable to do so, although they require L-asparagine for their growth and
survival. L-asparaginase has been found to act as an anti-cancer agent and acts to
remove all asparagine externally available to cells. As the internal supply of
asparagine becomes depleted, the cancer cells die (Livingston and Krakoff, 1970).
The reaction rate r = kC
E
C
A
a
C
B
b
, where k is the reaction rate constant, C
E
is the
concentration of enzyme in solution, C
A
is the concentration of substrate A in
solution, and C
B
is the concentration of substrate B in solution. Rate r is a function
of three independent co ncentration variables, and k, a, and b are the coefficien ts that
are calculated from experiments that measure a range of reaction rates as a function
of concentration values of each reacting substance. How do we approach this
regression problem?
An equation of the form m ¼ kt
p
1
t
q
2
t
r
3
is called a multivariable power-law equation.
This equation can be linearized by taking the logarithm of both sides to obtain
ln m ¼ ln k þ p ln t
1
þ q ln t
2
þ r ln t
3
: (2:48)
plot(x(1:length(Ca)),ya,‘k*’,x(1:length(Ca)),Aa*ca,‘k–’, ...
‘LineWidth’,2)
xlabel(‘{\it t} in hours’)
ylabel(‘log({\itC_a})’)
legend(‘transformed data’, ‘best-fit model’)
123
2.11 Multivariable linear least-squares regression
If we substitute y ¼ m; x
1
¼ ln t
1
; x
2
¼ ln t
2
; x
3
¼ ln t
3
, and β
0
¼ ln k; β
1
¼ p;
β
2
¼ q; β
3
¼ r, Equation (2.48) becomes
y ¼ β
0
þ β
1
x
1
þ β
2
x
2
þ β
3
x
3
: (2:49)
Equation (2.49) has four unknowns: β
0
, β
1
, β
2
, β
3
. The normal equations A
T
Ac ¼
A
T
y apply, where
A ¼
1 x
1;1
x
2;1
x
3;1
1 x
1;2
x
2;2
x
3;2
:
:
:
1 x
1;m
x
2;m
x
3;m
2
6
6
6
6
6
6
4
3
7
7
7
7
7
7
5
; c ¼
β
0
β
1
β
2
β
3
2
6
6
4
3
7
7
5
; and y ¼
y
1
y
2
:
:
:
y
m
2
6
6
6
6
6
6
4
3
7
7
7
7
7
7
5
:
The second subscript in the individual terms of A indicates the 1 ≤ i ≤ m data
points.
Equation (2.49) presents the simple dependence of y on the independent variables.
Remember that, while the model must be linear in the model parameters β, the
relationships between the dependent and independent variables need not be linear.
The normal system can be applied for linear regression if the model is, for example,
y ¼ a
0
þ a
1
ln x
1
þ a
2
x
2
1
x
2
þ a
3
sin x
3
.
2.12 The MATLAB function polyfit
MATLAB provides a built-in function called polyfit that uses the linear least-squares
method to fit a polynomial in x of degree n to a set of data y. The syntax for this function is
p = polyfit(x, y, n)
where x is the independent variable vector, y is the dependent variable vector, n is the
degree of the polynomial, and p is a vector containing the n+1 coefficients of the
polynomial in x. The coefficients of the polynomial in p are arranged in descending
order of the powers of x. The MATLAB polyfit function uses the QR facto rization
method to solve overdetermined systems using the least-squares method.
Box 2.4C Platelet Flow Rheology
We wish to fit the function α
crit
¼ β
2
H
2
þ β
1
H þ β
0
, where α
crit
is the critical angle of tilt of the platelet at
which the transition in flow behavior occurs.
The vectors H and α contain the data to be fitted by a second-order polynomial:
44
H = [0.5 0.55 0.6 0.65 0.7];
44
alpha = [10.5 10 8.5 7.0 4.5];
44
c = polyfit(H, alpha, 2)
c=
-114.2857 107.1429 -14.4714
The least-squares fitted polynomial is
α
crit
¼114:2857H
2
þ 107:1429H 14:4714:
124
Systems of linear equations

2.13 End of Chapter 2: key points to consider
Concepts from linear algebra and MATLAB programming
(1) A one-dimensional array is called a vector and a two-dimensional array is called a
matrix.A1× 1 array is a scalar.
(2) The dot product of two vectors is defined as u v ¼
P
i¼n
i¼1
u
i
v
i
, where both vectors have
the same number of elements n. To obtain the dot product of two vectors, a column
vector on the right must be pre-multiplied by a row vector on the left. The dot
product is an example of matrix–matrix multiplication in which a 1 × n matrix is
multiplied with an n × 1 matrix.
(3) Matrix–matrix multiplication of A with B is defined if A is an m × n matrix and B is an
n × p matrix, i.e. their inner dimensions must agree. The resulting matrix C = AB has
the dimensions m × p. Every element c
ij
of C is equal to the dot product of the ith row
of A and the jth column of B.
(4) The norm of a vector is a real number that specifies the length of the vector. A p-norm
is a general metho d used to calculate the vector length and is defined, for vector v,
as kvk
p
¼
P
n
i¼1
jv
i
j
p
1=p
. The p = 2 norm (Euclid ean norm) is defined as
kvk¼
ffiffiffiffiffiffiffiffi
v v
p
¼
P
i¼n
i¼1
v
2
i
1=2
.
(5) The norm of a matrix A is a measure of the maximum degree to which A can stretch a
unit vector x. Mathematically, we write kAk¼max
kxk¼1
kAxk.
(6) A linear combination of vectors is the sum of one or more vectors of equal dimension,
each multiplied by a scalar, and results in another vector of the same dimension.
If V ¼ðv
1
; v
2
; ...; v
n
Þ is a set of vectors, and if u ¼ k
1
v
1
þ k
2
v
2
þþk
n
v
n
, where k
i
for 1 ≤ i ≤ n are scalars, then u is said to be a linear combination of the given set of
vectors V.
(7) If V ¼ðv
1
; v
2
; ...; v
n
Þ is a set of vectors, and the vector equation k
1
v
1
þ k
2
v
2
þþ
k
n
v
n
¼ 0 holds true only when all k
i
= 0 for 1 ≤ i ≤ n, then the vectors are said to be
linearly indepen dent . If it holds true for non-zero values of the scalars, i.e. there exists
multiple solutions to the vector equation, then the vectors in set V are linearly
dependent.
(8) A vector space S that contains a set of vectors V must also contain all vectors that
result from vector addition and scalar multiplication operations on the set V, i.e. all
possible linear combinations of the vector s in V. The physical three-dimensional
space that we live in is a vector space. If the vectors in the set V are linearly
independent, and all possible linear combinations of these vectors fully describe
the vector space S, then these vectors are called basis vectors for the space S.
The number of basis vectors that are required to describe the vector space S fully
is called the dimension of the vector space.
(9) The vector space spanned by the columns of a matrix is called the column space.
(10) The determinant of a matrix is defined only for square matrices and is a scalar
quantity. The determinant of an n × n matrix is the sum of all possible products of
n elements of matrix A, such that no two elements of the same row or column are
multiplied together. A matrix that has a non-zero determinant is called non-singular,
whereas a matrix whose determinant is equal to zero is singular.
(11) The rank of a matrix A is the dimension of the largest submatrix within A that has
a non-zero determinant. Equivalently, the rank of a matrix is equal to the dimension of
the column space of the matrix A, i.e. the number of linearly independent columns in A.
125
2.13 Key points

(12) The inverse of a matrix A is denoted as A
1
and is only defined for non-singular
square matrices. When a matrix is multiplied by its inverse, the identity matrix I is
obtained: AA
1
¼ A
1
A ¼ I .
Solution techniques for systems of linear equations
(1) A system of linear equations can be compactly represented by the matrix equation
Ax = b, where A is the coefficient matrix, b is the vector of constants, and x is the
vector containing the unknowns.
(2) The rank of the coefficient matrix A and the augmented matrix [Ab] tells us whether
(a) a unique solution exists,
(b) infinitely many solutions exist, or
(c) no solution exists
for a system of linear equations Ax = b.
(3) Gaussian elimin ation is a direct method that is used to solve consistent systems
of linear equations Ax = b for which the determinant of the coefficient matrix
A
jj
6¼ 0.
(a) Gaussian elimination reduces the augmented matrix [Ab]toupper triangular form.
(b) The pivot row is used to zero the elements in rows below it. The column in which
the elements are being zeroed is called the pivot column.Thepivot element is
locatedinthepivotrowandpivotcolumnandisusedtozerotheelements
beneath it.
(4) Backward substitution works backwards from the last equation of the linear system,
specified by the upper triangular form of the augmented matrix [Ab] that results
from Gaussian elimination, to the first, to obtain the solution x. For a system of n
equations in n unknowns, x
n
is obtained first using the last (bottom-most) equation
specified by [Ab]. The knowledge of x
n
is used to obtain x
n1
using the second-last
equation from [Ab]. This procedure continues until x
1
is obtained.
(5) Gaussian elimination fails if any of the elements along the main diagonal of the
augmented matrix is either exactly zero or close to zero. Partial pivoting is used to
remove zeros or small numbers from the diagonal. Before any zeroing of elements is
performed, the pivot element in the pivot row is compared with all other elements in
the pivot column. Row swapping is carried out to place at the pivot row position, the
row containing the element with the largest absolute magnitude.
(6) LU factorization is a direct method to solve systems of linear equations and is most
useful when the same coefficient matrix A is shared by several systems of equations.
In this method, A is factorized into two matrices: a lower triangular matrix L and an
upper triangular matrix U, i.e. A = LU. Note that U is the same as the upper
triangular matrix that results from Gaussian elimination, and L contains the multi-
pliers that are used to zero the below-diagonal entries in the augmented matrix. In
this process , we decouple the transformations carried out on A from that on b. Two
sequential steps are required to extract the solution:
(a) forward substitution to solve Ly = b;
(b) backward substitution to solve Ux = y.
(7) Pivoting or exchanging of rows is recommended when performing LU factorization
in order to limit round-off errors generated during elimination steps. A permutation
matrix P must be used to track row swaps so that b can be transformed accordingly
prior to forward substitution. Mathematically, LU = PA and LUx = Pb.
(8) A problem is said to be ill-conditioned if the solution is hypersensitive to small
changes in the coefficients and constants of the linear equations. On the other
126
Systems of linear equations