Кац Н.Г., Стариков В.П., Парфенова С.Н. Химическое сопротивление материалов и защита оборудования нефтегазопереработки от коррозии
Подождите немного. Документ загружается.


89
Уравнение (2.14) для скорости электрохимического коррозионно-
го процесса можно в общем виде переписать следующим образом:
Р
R
EE
I
обраобрк
)()(
'
, (2.17)
где Р – поляризационное сопротивление системы.
При катодной поляризации скорость выделения водорода возрас-
тает, а скорость растворения металла уменьшается. Таким образом,
при помощи катодной поляризации можно защитить металл от корро-
зии.
2.4. Коррозионный процесс с водородной деполяризацией
Коррозию металлов, при которой катодная реакция осуществля-
ется с выделением водорода, называют коррозией металлов с водо-
родной деполяризацией [1, 5].
Термодинамическая возможность коррозии с водородной депо-
ляризацией определяется соотношением
обр
H
обрMe
EE )()(
2
,
где
обр
H
E )(
2
– обратимый потенциал водородного электрода в данных
условиях:
2/1
2
2
lg303,2)(
H
H
обр
H
P
a
F
RT
E .
Коррозия металлов с водородной деполяризацией в большинстве
случаев имеет место в электролитах, соприкасающихся с атмосферой,
парциальное давление водорода в которой равно
P
5∙10
-2
Па. При
определении термодинамической возможности протекания коррози-
онных процессов с водородной деполяризацией обратимый потенци-

90
ал водородного электрода в этих электролитах следует рассматри-
вать, учитывая реальное парциальное давление водорода в воздухе. В
табл. 2.1 приведены значения обратимого потенциала водородного
электрода при температуре 25 °С и различных значениях рН среды и
парциального давления водорода [60].
Таблица 2.1
Значения обратимого потенциала водородного электрода
обр
H
E )(
2
,В
P
, МПа
pH 0 pH 7 pH 14
5∙10
-8
+0,186 -0,228 -0,641
0,1 0,00 -0,414 -0,828
Коррозия металлов с водородной деполяризацией имеет место:
при высокой активности ионов водорода, т.е. в растворах ки-
слот, например, кислотное растворение железа, цинка и других ме-
таллов;
при достаточно отрицательных значениях потенциала иониза-
ции металла, например, коррозия магния в воде или в растворах солей.
На практике с такими явлениями сталкиваются при хранении и
перевозке кислот, при кислотном травлении металлов, при получении
кислот на стадии абсорбции.
Протекание коррозии с выделением водорода термодинамически
возможно, если
ka
EE
.
В щелочных растворах концентрация ионов Н
3
О
+
крайне мала, и
выделение водорода происходит за счет восстановления молекул во-
ды:
ОННеОН 222
22
. (2.18)
Главными причинами катодной поляризации является замедлен-
ная стадия электрохимического разряда или концентрационная поля-
ризация по молекулярному водороду, связанная с отводом газообраз-
ного продукта.
91
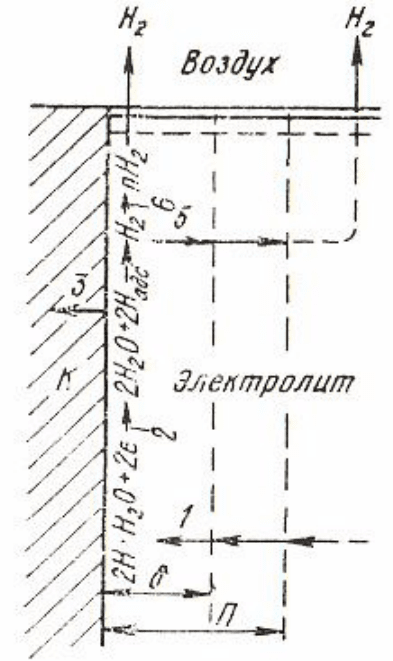
Рис. 2.8. Схема катодного процесса водородной деполяризации:
П – слой Прандтля;
– диффузионный слой; К – катодный участок
поверхности корродирующего металла; 1–6 – стадии процесса
Водородная деполяризация в кислых средах состоит из следую-
щих стадий (рис. 2.8) [1]:
1) подвод (конвекция и диффузия) гидратированных ионов водо-
рода OHH
2
к катодным участкам поверхности корродирующего
металла;
2) разряд водородных ионов в соответствии с реакцией
OHHeOHH
адс 22
; (2.19)
3) растворение и диффузия части адсорбированных атомов
адс
H в
металле;
4) рекомбинация водородных атомов по реакции (2.20) или элек-
трохимическая десорбция по реакции (2.21):
92
2
HHH
адсадс
; (2.20)
OHHeOHHH
адс 222
; (2.21)
5) отвод молекул водорода от катодных участков в объем элек-
тролита и их выделение в атмосферу;
6) образование и отрыв пузырька водорода от поверхности ме-
талла по реакции
2222
...... nHHHH . (2.22)
В щелочных растворах, в которых концентрация ионов OHH
2
мала, коррозия металлов с выделением водорода идет за счет восста-
новления водорода из молекул воды (2.23), и появляется дополни-
тельная стадия – отвод ионов
OH
в глубь раствора:
OHHeOH
адс2
. (2.23)
Катодный процесс может тормозиться на стадиях химических ре-
акций, что приводит к возникновению электрохимической поляриза-
ции, называемой перенапряжением водорода. Если катодный процесс
тормозится на стадиях массопереноса, то возникает концентрацион-
ная поляризация.
Различают [24] ионную и газовую концентрационную поляриза-
цию. Ионная – следствие торможения процесса транспорта ионов во-
дорода к катодным участкам, а газовая – следствие торможения про-
цесса отвода молекулярного водорода от катодных участков в объем
электролита. В отличие от ионной газовая концентрационная поляри-
зация постоянно сопровождает процесс водородной деполяризации и
всегда значительна.
Таким образом, коррозия металлов с водородной деполяризацией
характеризуется [1]:

93
большой зависимостью скорости коррозии метала от рН рас-
твора;
большой зависимостью коррозионной стойкости сплавов от их
природы и содержания в них катодных примесей;
увеличением скорости коррозии во времени, что связано с
ростом посторонних примесей на поверхности металла в результате
его растворения;
возможностью появления водородной хрупкости металлов.
2.5. Коррозионный процесс с кислородной деполяризацией
Процессы коррозии металлов, у которых катодная реакция осу-
ществляется с участием растворенного в электролите кислорода, на-
зываются коррозией с кислородной деполяризацией [4].
Термодинамическая возможность коррозии металлов с кислород-
ной деполяризацией определяется соотношением
обр
O
обрMe
EE )()(
2
,
где
обр
O
E )(
2
– обратимый потенциал кислородного электрода в данных
условиях,
OH
O
обр
o
обр
O
a
P
F
RT
EE
2
22
lg303,2
4
)()(
0
.
Коррозия металлов с кислородной деполяризацией происходит в
основном в электролитах, соприкасающихся с атмосферой, парциаль-
ное давление кислорода в которой
021
,
0
P
МПа. Следовательно,
при определении термодинамической возможности протекания кор-
розионного процесса с кислородной деполяризацией расчет обрати-
мого потенциала кислородного электрода в этих электролитах следу-
ет производить, учитывая реальное парциальное давление кислорода

94
в воздухе. В табл. 2.2 приведены обратимые потенциалы кислородно-
го электрода при температуре 25 °С, различных значениях рН среды
и парциального давления кислорода [60].
Таблица 2.2
Значения обратимых потенциалов кислородного электрода
обр
O
E )(
2
, В
P
, МПа
рН 0 рН 7 рН 14
0,021 +1,218 +0,805 +0,381
0,1 +1,229 +0,815 +0,400
С кислородной деполяризацией корродируют металлы, находя-
щиеся в атмосфере или соприкасающиеся с водой и растворами со-
лей. Это могут быть обшивка судов в речной или морской воде, обо-
рудование охладительных систем химических заводов, магистраль-
ные трубопроводы и т.д. Коррозия металла с кислородной деполяри-
зацией является самым распространенным коррозионным процессом.
Катодный процесс кислородной деполяризации включает сле-
дующие последовательные стадии (рис. 2.9) [1]:
1) растворение кислорода воздуха в электролите;
2) перенос растворенного кислорода в объеме электролита в ре-
зультате движения электролита;
3) перенос кислорода в части слоя Прандтля толщиной
П
в
результате движения электролита, т.е. конвекции;
4) перенос кислорода в диффузионном слое электролита толщи-
ной
или в пленке продуктов коррозии на металле к катодным уча-
сткам поверхности корродирующего металла;
5) ионизация кислорода – электрохимическая реакция в ней-
тральных и щелочных (2.24), в кислых (2.25) растворах:
)(44
22
воднOHOHeO
; (2.24)
OHводнHeO
22
2)(44
; (2.25)

95
6) диффузия и конвективный перенос ионов
OH
от катодных
участков поверхности корродирующего металла в глубь электролита.
Рис. 2.9. Схема катодного процесса кислородной деполяризации:
П – слой Прандтля;
– диффузионный слой; К – катодный участок
поверхности корродирующего металла; V – скорость движения
электролита; l – расстояние от катодных участков;
1-6 – стадии процесса
В большинстве случаев наиболее медленными стадиями катодно-
го процесса в спокойных электролитах является диффузия кислорода,
а при перемешивании раствора – ионизация кислорода.
Катодный процесс с кислородной деполяризацией может тормо-
зиться на стадии электрохимической реакции ионизации кислорода
(кинетический контроль процесса), что приводит к появлению элек-
трохимической поляризации
эхk
E )(
. Этот процесс принято называть
перенапряжением ионизации кислорода. Такой вид поляризации на-
блюдается при небольших плотностях катодного тока, в сильно пере-
мешиваемых электролитах, при очень тонкой пленке продуктов кор-
розии на металле (например, в случае атмосферной коррозии).
96
Если катодный процесс испытывает торможение на стадиях мас-
сопереноса, то это приводит к концентрационной поляризации
концk
E )(
. В данном случае катодный процесс находится в диффузион-
ной области контроля, что характерно при плотностях катодного то-
ка, близких к предельным, в спокойных электролитах, при наличии
толстой пленки труднорастворимых продуктов коррозии (подземная
коррозия) [24].
Результирующее смещение катодного электродного потенциала
)(
k
E
определяется как
концkэхkk
EEE )()(
. (2.26)
На поверхности ряда металлов, корродирующих с кислородной
деполяризацией, могут появляться аэрационные пары (пары неравно-
мерной аэрации), в которых приток кислорода к одной части поверх-
ности металла больше, чем к другой. На более аэрируемых участках
металла локализуется протекание катодного процесса, на что указы-
вает сдвиг потенциала металлов в положительную сторону при уве-
личении концентрации кислорода в электролите или облегчение дос-
тавки кислорода к поверхности металла при перемешивании электро-
лита. В то же время на менее аэрируемых участках металлов локали-
зуется анодный процесс, что приводит к усилению коррозии этих
участков [1, 4, 5].
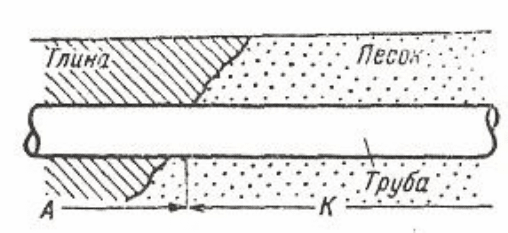
Аэрационные пары возникают, например, при грунтовой корро-
зии металлов (рис. 2.10) [1].
Рис. 2.10. Возникновение аэрационной гальванической пары
при прохождении стальной трубы через участки грунта
с разной проницаемостью для воздуха
97
2.6. Коррозионные диаграммы
Аналитическую зависимость электродного потенциала от плот-
ности тока можно вывести только для простых случаев коррозии, в то
время как поляризационные кривые можно получить опытным путем
даже для случаев сложной коррозии.
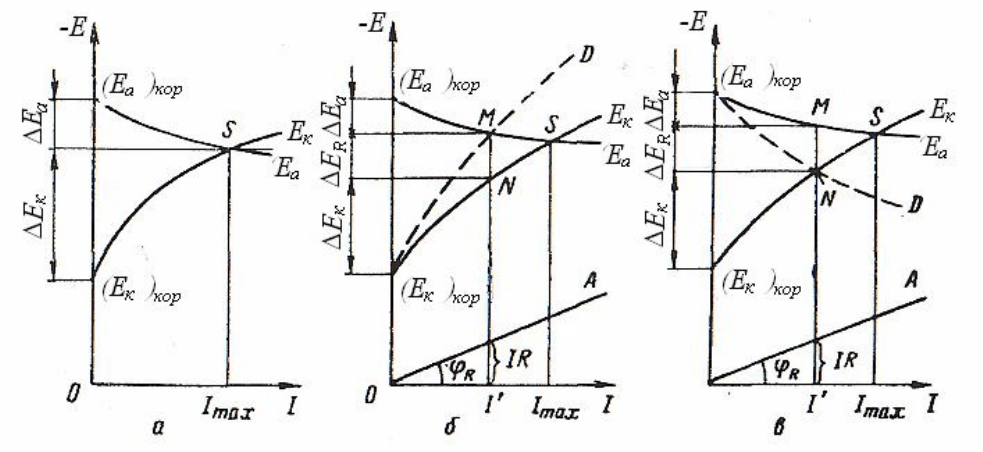
Рис. 2.11. Поляризационные коррозионные диаграммы:
а
–
0
R
,
б
и
в
–
0
R
Для графического расчета скорости и характеристик электрохи-
мического коррозионного процесса используют поляризационные
кривые (рис. 2.11) с учетом суммарной площади корродирующего
металла (т.е.
kkaa
SiSiI
), впервые предложенные Эвансом [1]:
– анодной поляризации участков корродирующего металла
)(
aa
ifE
;
– катодной поляризации участков корродирующего металла
)(
kk
ifE
.
Точка пересечения анодной и катодной кривых S отвечает значе-
нию максимального коррозионного тока
max
I и общему стационарно-
му потенциалу двухэлектродной системы
x
E , которые соответствуют
98
отсутствию омического сопротивления в системе
)
0
(
R
и называют-
ся полностью заполяризованными (см. рис. 2.11, а). Движущая сила
коррозионного процесса – разность обратимых потенциалов катодно-
го и анодного процессов
обр
E полностью израсходована на преодоле-
ние поляризационных сопротивлений, так что на всей поверхности
металла устанавливаются потенциалы, близкие к значению
x
E , т.е.
поверхность становится изопотенциальной [1, 24].
Если омическое сопротивление корродирующей системы не рав-
но нулю, можно также произвести расчет коррозионного процесса: по
известному омическому сопротивлению определяется омическое па-
дение потенциала
R
E
:
IRE
R
. (2.27)
Графически зависимость (2.27) изображается прямой
OA
с углом
наклона
R
(см. рис. 2.11, в), такая система считается неполностью
заполяризованной, т.е. неизопотенциальной.
Таким образом, используя коррозионные диаграммы, можно гра-
фически найти значения анодной поляризации
a
E
, катодной поляри-
зации
k
E
и омическое падение потенциала
R
E
при силе коррозион-
ного тока
'
I
.
Отдельно полученные анодные и катодные поляризационные
кривые не описывают скорость коррозионного процесса. Последняя
определяется скоростью протекания самой медленной, лимитирую-
щей стадии. Эту стадию называют контролирующим фактором, т.е.
стадией процесса коррозии, которая имеет наибольшее сопротивле-
ние по сравнению с остальными стадиями и поэтому оказывает ос-
новное влияние на скорость коррозии металла. Для определения кон-