Иванов-Смоленский А.В. Электрические машины т 2
Подождите немного. Документ загружается.

60
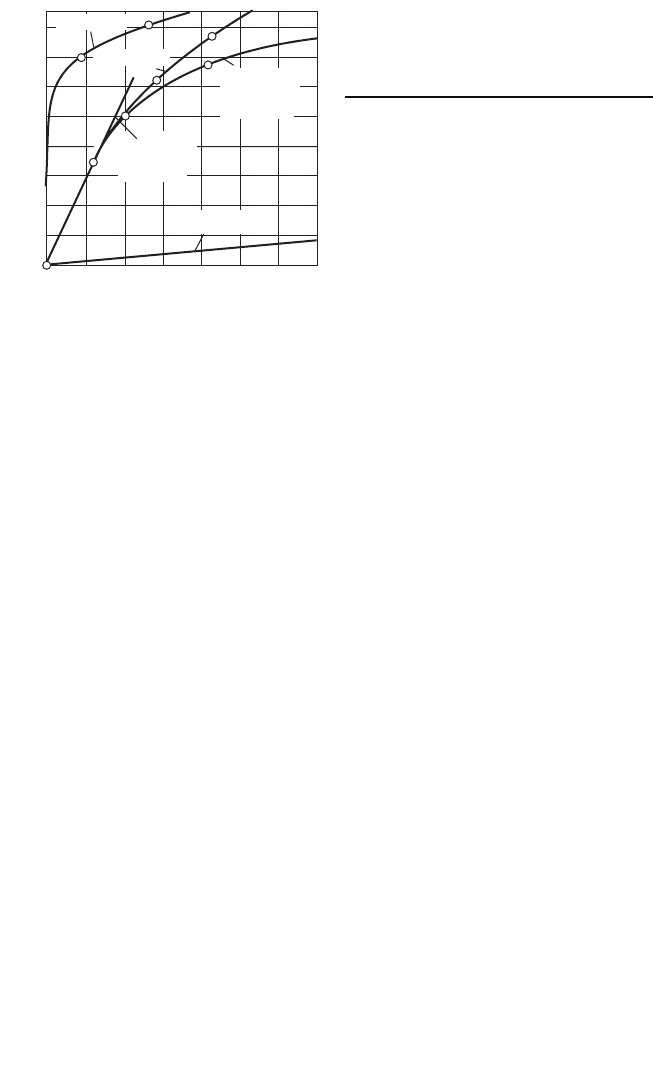
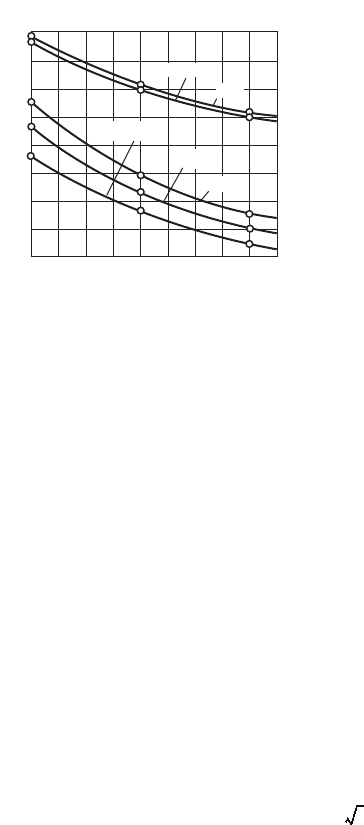
Характеристики различных
неявнополюсных машин в отно-
сительных единицах мало отлича-
ются одна от другой, и, когда от-
сутствуют характеристики кон-
кретной машины, можно исполь-
зовать в расчете усредненные от-
носительные характеристики холостого хода и намагничивания неяв-
нополюсных машин, называемые нормальными характеристиками.
Нормальные характеристики холостого хода и намагничивания не-
явнополюсных машин приведены на рис. 53.11.
Ф
2*
=f(F
2*
)
Ф
m*
=f(F
F*
)
Ф
m*
=f(F
fm*
)
Ф
m*
=f(F
1*
)
E
f*
= f(F
F*
)
E
f*
=f(F
fm*
)
F
*
Ф
*
1,6
1,4
1,2
1,0
0,8
0,6
0,4
0,2
0
или
или
F
fF*
=f(F
1*
)
0,5 1,0 1,5 2,0 2,5 3,0
Рис. 53.11. Нормальные характеристи-
ки холостого хода и намагничивания
неявнополюсных синхронных машин

61
Глава пятьдесят четвертая
МАГНИТОДВИЖУЩАЯ СИЛА, МАГНИТНОЕ ПОЛЕ,
ЭДС И ПАРАМЕТРЫ ОБМОТКИ ЯКОРЯ
54.1. Манитодвижщая сила яоря и ее составляющие
по продольной и поперечной осям
Магнитное поле в нагруженной синхронной машине образуется
током в обмотке возбуждения и симметричной системой токов в мно-
гофазной (обычно трехфазной, m
1
= 3) обмотке. Наибольшую роль в
процессе преобразования энергии в машине играет поле взаимной
индукции, соответствующее основной гармонической индукции в за-
зоре.
В образовании поля взаимной индукции принимают участие МДС
обмотки возбуждения F
fm
= w
f
I
f
и основная гармоническая МДС об-
мотки якоря (см. § 25.4) с амплитудой
.(54.1)
Предположим, что магнитная цепь машины не насыщена, считая
относительную магнитную проницаемость стальных участков цепи
бесконечно большой μ
с
= ×. При этом допущении магнитное сопро-
тивление цепи имеет лишь одну постоянную составляющую — со-
противление зазора. Магнитная цепь может считаться линейной,
и поле взаимной индукции в ней может быть представлено в виде
суммы более простых полей: поля от МДС обмотки возбуждения F
fm
и поля от МДС обмотки якоря F
a
.
Поле от МДС возбуждения F
fm
уже было изучено при рассмотре-
нии холостого хода (см. гл. 53). При μ
с
= × магнитные напряжения
стальных участков раны нулю (F
a1
= F
Z1
= F
m
= F
Z2
= F
a2
= 0), МДС
возбуждения уравновешивает только магнитное напряжение зазора
(F
fm
= F
δ
); магнитный поток возбуждения Φ
fm
= Φ
m
и ЭДС возбу-
ждения E
f
могут быть определены по спрямленным в начале коорди-
нат характеристикам намагничивания и холостого хода [Φ
m
= f (F
δ
) и
E
f
= f (F
δ
)] на рис. 53.7.
F
am
2
π
-------
m
1
Iw
1
k
o1
p
-----------------
=
62
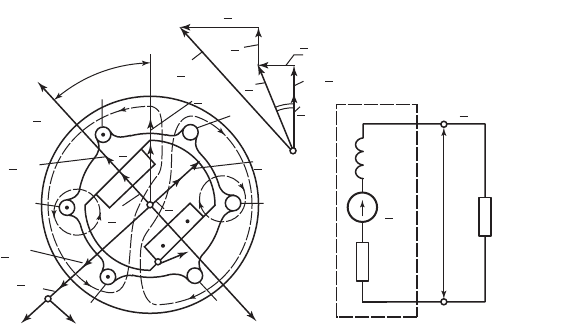
На диаграмме рис. 54.1, показанной на комплексной плоскости од-
нопериодной модели трехфазной синхронной машины, направления
комплексов МДС возбуждения и потока возбуждения опре-
деляются током в обмотке возбуждения. Электродвижущая сила
возбуждения , индуктированная в обмотке якоря полем возбужде-
ния, отстает на угол π/2 от потока возбуждения .
Магнитодвижущая сила якоря совпадает по направлению
с током якоря (§ 25.4), амплитуда и фаза которого по отношению
к ЭДС зависят от нагрузки машины. В зависимости от режима,
в котором работает машина, и от нагрузки в этом режиме угол β меж-
ду ЭДС и током (или МДС ) может быть любым в пределах
от 0 до 2π.
В неявнополюсной машине определение магнитного поля от про-
извольно ориентированной МДС F
am
не вызывает затруднений, по-
скольку зазор между ротором и статором всюду одинаков (поле опре-
деляется так же, как в асинхронной машине). В явнополюсной маши-
не определить поле от МДС F
am
при произвольном угле β достаточно
сложно (рис. 54.1). Расчет поля якоря существенно упрощается, если
определять его как сумму полей от составляющих МДС по двум
взаимно перпендикулярным осям ротора-модели: продольной оси d,
совпадающей с осью полюсов и направленной по МДС , и попе-
речной оси q, совпадающей с осью промежутка между полюсами и
+
+
+
+
+
E
f
R
1
U
I
L
D
Y
E
f
F
am
F
dm
F
qm
F
fm
Ф
fm
I
q
E
f
I
d
I
R
н
I
R
1
I
jX
н
I
jX
1
I
jX
I
CM
X
B
A
Z
н
=R
н
+jX
н
U
q
d
Y
Z
C
Рис. 54.1. Магнитное поле от МДС обмотки якоря при нагрузке
F
–
fm
Ф
–
fm
I
–
f
E
–
f
Ф
–
fm
F
–
am
I
–
E
–
f
E
–
f
I
–
F
–
am
F
–
am
F
–
fm

63
опережающей ось d на электрический угол π/2. Разложение МДС
на продольную и поперечную составляющие произведено
на рис. 54.1. Амплитуды этих составляющих равны:
(54.2)
Сопоставляя (54.1), (54.2), видим, что составляющие F
am
могут
быть образованы соответственно продольной системой токов с дейст-
вующим значением I
d
= и поперечной системой токов с дей-
ствующим значением I
q
= :
(54.3)
54.2. Манитодвижщая сила яоря при различных нарзах
в режиме енератора
Рассмотрим работу синхронной машины в режиме генератора, ко-
гда обмотка ее якоря включена на симметричную автономную на-
грузку с одинаковыми сопротивлениями во всех фазах = R
н
+ jX
н
.
Выясним, как зависят от нагрузки МДС якоря F
am
и ее продольная F
dm
и поперечная F
qm
составляющие.
Схема замещения ненасыщенной машины в этом режиме изобра-
жена на рис. 54.1. Ток , появляющийся в обмотке якоря под дейст-
вием ЭДС возбуждения , зависит не только от сопротивления на-
грузки , но и от собственного сопротивления фазы обмотки якоря
= R
1
+ jX
1
:
(54.4)
F
–
am
F
–
dm
F
–
qm
F
dm
F
am
βsin ;=
F
qm
F
am
βcos .=
⎭
⎬
⎫
I βsin
I βcos
F
–
dm
2
π
-------
m
1
I
–
d
w
1
k
o1
p
---------------------
;=
F
–
qm
2
π
-------
m
1
I
–
q
w
1
k
o1
p
---------------------
.=
⎭
⎪
⎬
⎪
⎫
Z
–
н
I
–
E
–
f
Z
–
н
Z
–
1
I
–
E
–
f
R
1
R
н
+()jX
1
X
н
+()+
------------------------------------------------------------
;=
I
E
f
R
1
R
н
+()
2
X
1
X
н
+()
2
+
--------------------------------------------------------------------
.=
⎭
⎪
⎪
⎬
⎪
⎪
⎫
64
Угол β между и зависит от отношения реактивной состав-
ляющей сопротивления схемы к его активной составляющей:
.(54.5)
В этих уравнениях индуктивное сопротивление обмотки якоря X
1
складывается из индуктивного сопротивления рассеяния X
σ
= ωL
σ
и главного индуктивного сопротивления X
a
= ωL
a
, связанного с полем
взаимной индукции якоря. Сопротивление R
1
является активным со-
противлением фазы якоря. Расчет X
1
и R
1
изложен в § 54.5.
Из диаграммы напряжений, построенной на рис. 54.1, видно, что
угол β в общем случае отличается от угла ϕ между током и напря-
жением на выводах машины , зависящего только от сопро-
тивления нагрузки.
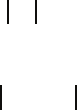
Индуктивная нагрузка. При индуктивной нагрузке (рис. 54.2, б),
когда = jX
н
, R
н
= 0 и X
н
> 0, а собственное активное сопротивление
фазы R
1
мало по сравнению с индуктивным сопротивлением X
1
+ X
н
,
ток отстает от ЭДС на угол β = arctg × = +π/2 и направлен по
продольной оси:
I
d
= I sin β = I; I
q
= I cos β = 0.
Магнитодвижущая сила якоря F
am
= F
dm
и магнитное поле от сис-
темы продольных токов I = I
d
направлены в противоположную сто-
рону по отношению к МДС возбуждения F
fm
и ослабляют поле возбу-
ждения. Таким образом, при индуктивной нагрузке по обмотке якоря
протекает система продольных размагничивающих токов .
Емкостная нагрузка (по отношению к ЭДС E
f
) имеет место при
включении обмотки якоря на систему симметричных емкостей C
с сопротивлением = jX
н
, подобранным таким образом, что реак-
тивное сопротивление X
н
= –X
C
= –1/(ωC) < 0 по абсолютному значе-
нию превышает собственное индуктивное сопротивление якоря X
1
,
т.е. X
C
= > X
1
и X
1
+ X
н
= X
1
– X
C
< 0.
При емкостной нагрузке (рис. 54.2, в), если собственное активное
сопротивление фазы R
1
мало по сравнению с индуктивным сопротив-
лением , угол между током якоря и ЭДС равен:
.
E
–
f
I
–
β arctg
X
1
X
н
+
R
1
R
н
+
--------------------
=
I
–
U
–
Z
–
н
I
–
=
Z
–
н
I
–
E
–
f
I
–
d
Z
–
н
X
н
X
н
X
1
+ I
–
E
–
f
β arctg
X
н
X
1
+
R
1
--------------------
arctg ×–() π/2–===
65
Это означает, что ток якоря опережает ЭДС на угол β и, сле-
довательно, направлен по продольной оси:
;
.
При этом МДС якоря F
am
= F
dm
и магнитное поле от системы про-
дольных токов I = I
d
совпадают по направлению с МДС возбуждения
++
+
+
+
+
+
+
+
+
+
+
+
+
d
D
D
D
D
D=0
D=R2
D=–R2
Ф
fm
F
qm
E
f
E
f
Ф
fm
Ф
fm
F
dm
F
fm
F
fm
F
fm
F
dm
E
f
U
R
н
I
jX
1
I
–jX
c
I
Z
Z
Z
I=I
q
I=I
d
I=I
d
q
q
q
q
q
q
d
d
d
d
d
A
A
A
Y
Y
Y
C
C
C
X
X
X
B
B
B
а)
б)
в)
Рис. 54.2. Магнитное поле и МДС якоря при характерных нагрузках:
а — поле и МДС от поперечного тока якоря; б — поле и МДС от продольного раз-
магничивающего тока; в — поле и МДС от продольного намагничивающего тока
I
–
E
–
f
I
d
I βsin I==
I
q
I βcos 0==
66
F
fm
и усиливают поле возбуждения. Таким образом, при емкостной
нагрузке по обмотке якоря протекает система продольных намагни-
чивающих токов I
d
.
Активная нагрузка. Под активной нагрузкой по отношению
к ЭДС возбуждения понимается нагрузка, при которой ток якоря
совпадает по фазе с ЭДС и угол β = 0 (рис. 54.2, а). Такой режим
может быть практически осуществлен, если обмотка якоря включена
на систему симметричных активно-емкостных сопротивлений =
= R
н
+ jX
н
[где X
н
= –X
C
= –1 /(ωC)], подобранных таким образом, что
X
1
= X
C
и полное реактивное сопротивление контура X
1
+ X
н
= X
1
– X
C
обращается в нуль (см. диаграмму напряжений на рис. 54.2, а, по-
строенную при пренебрежении сопротивлением R
1
). При такой на-
грузке угол между током якоря и ЭДС равен:
;
ток якоря направлен по поперечной оси:
I
q
= I cos β = I;
I
d
= I sin β = 0.
Магнитное поле якоря, образованное МДС якоря F
a
= F
q
, получа-
ется поперечным. Поперечное поле встречает на своем пути значи-
тельно больший зазор, чем продольное поле. Суммируясь с полем воз-
буждения, поперечное поле несколько увеличивает результирующее
поле, отклоняя его от продольной оси.
54.3. Манитное поле взаимной индции и ЭДС от тоов
в обмоте яоря
Без учета насыщения (при допущении μ
c
= ×) магнитное поле от то-
ков якоря I может быть рассмотрено независимо от поля возбуждения.
В неявнополюсной машине с равномерным зазором δ магнитное
поле якоря в зазоре повторяет по форме основную гармоническую
МДС якоря F
am
. Индукция распределяется в зазоре синусоидально
(см. § 25.5), и ее амплитуда равна B
δ1m
= μ
0
F
am
/(δk
δ
). С обмоткой яко-
ря сцеплен магнитный поток взаимной индукции
,(54.6)
E
–
f
I
–
E
–
f
Z
–
н
I
–
E
–
f
β arctg
X
н
X
1
+
R
н
--------------------
arctg 0 0===
Ф
m
2
π
---
τl
δ
B
1mδ
=

67
образующий с фазой якоря потокосцепление
Ψ
am
= w
1
k
01
Φ
m
,(54.7)
в обмотке якоря этим полем взаимной индукции индуктируется ЭДС
,(54.8)
отстающая на угол π/2 от совпадающих по фазе , , , и .
В явнополюсной машине вычислить поле взаимной индукции от
тока якоря при произвольном угле β очень сложно (см. рис. 54.1).
Поэтому принято определять его как сумму более простых полей: по-
ля взаимной индукции от продольной составляющей тока I
d
и поля
взаимной индукции от поперечной составляющей тока I
q
.
Поле взаимной индукции и ЭДС от продольной составляющей
тока. Система продольных токов I
d
в обмотке якоря (по рис. 54.2, б
или в) образует синусоидально распределенную МДС с амплитудой
F
dm
. Поле взаимной индукции от этой МДС может быть найдено чис-
ленными методами или с помощью математического моделирования.
Как показано на рис. 54.3, а, распределение радиальной составляю-
щей индукции в зазоре получается несинусоидальным.
Отношение основной гармонической индукции от продольной
МДС якоря B
ad1m
к амплитуде индукции B
adm
от этой МДС, опреде-
ленной при равномерном зазоре δ, называется коэффициентом фор-
мы поля по продольной оси
,(54.9)
где B
adm
= μ
0
F
dm
/ δ.
E
–
a
jωΨ
–
am
/2–=
Ψ
–
am
Ф
–
m
B
–
δ
F
–
a
I
–
I
–
а) б)
d
B
B
ad1m
B
aq1m
B
adm
B
aqm
F
dm
F
qm
V
V
F
q
B
Рис. 54.3. Магнитные поля от продольной (а) и поперечной (б) систем токов в об-
мотке якоря
k
d
B
ad1m
B
adm
----------------
=
68
Коэффициент k
d
, с помощью
которого легко рассчитать B
ad1m
,
зная B
adm
, зависит от отношения
максимального зазора δ
m
к мини-
мальному δ (рис. 54.3, а). Зави-
симости k
d
= f ( и ),
найденные по картинам магнит-
ных нолей при гладкой поверх-
ности магнитопровода якоря и
характерных для явнополюсных
машин относительных размерах
полюсного наконечника (α =
= b
p
/ τ = 0,69—0,72), приведены
на рис. 54.4. При гладкой поверх-
ности якоря зазор δ′ = δ, .
При необходимости учесть влияние пазов в магнитопроводе якоря
и в полюсном наконечнике следует считать δ′ = δk
δ
и
(см. § 53.1 — вычисление k
f
, k
ф
и др.).
Определив по кривым рис. 54.4 коэффициент k
d
, нетрудно рассчи-
тать магнитный поток взаимной индукции, соответствующий току I
d
:
, (54.10)
где B
adm
= μ
0
F
dm
/(δk
δ
).
С фазой обмотки якоря этот поток образует потокосцепление
Ψ
adm
= w
1
k
о1
Φ
adm
(54.11)
и индуктирует в ней ЭДС взаимной, индукции
. (54.12)
Поле взаимной индукции и ЭДС от поперечной составляющей
тока. Поле взаимной индукции от системы поперечных токов I
qm
в обмотке якоря (по рис. 54.2, а) также имеет несинусоидальную фор-
му. Как видно из рис. 54.3, б, радиальная составляющая индукции B в
зоне промежутка между полюсными наконечниками получается су-
щественно ослабленной по сравнению с индукцией, которая была бы
при равномерном зазоре δ (показана на рисунке штриховой линией).
δ′
m
/ δ′ δ′/ τ
δ′
m
/ δ
m
δ′
m
δ
m
k
δ
m
=
Ф
adm
2
π
---
τl
δ
B
ad1m
2
π
---
τl
δ
k
d
B
adm
==
E
–
ad
j
ωΨ
–
adm
2
--------------------
–=
}
}
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,6 1,0 1,4 1,8 2,2
k
d
,k
q
k
d
k
q
F'/V=0,01
F'/V=0,01
F'
m
/F
'
0,05
0,05
0,03
1,1
Рис. 54.4. Коэффициенты формы поля
по продольной и поперечной осям k
d
и k
q

69
Магнитный поток взаимной индукции от поперечной МДС рас-
считывается с помощью коэффициента формы поля по поперечной
оси k
q
, под которым понимается отношение основной гармонической
индукции от поперечной МДС якоря B
aq1m
к амплитуде индукции
B
aqm
от этой МДС, определенной при равномерном зазоре δ:
, (54.13)
где B
aqm
= μ
0
F
qm
/δ.
Зависимости k
q
= f ( и δ′/τ), найденные по картинам магнит-
ных полей при гладкой поверхности магнитопровода якоря, приведе-
ны на рис. 54.4. После определения коэффициента k
q
по кривым
рис. 54.4 легко рассчитать поток взаимной индукции, соответствую-
щий току I
q
:
, (54.14)
где B
aqm
= μ
0
F
qm
/(δk
δ
).
С фазой обмотки якоря этот поток образует потокосцепление
Ψ
aqm
= w
1
k
о1
Φ
aqm
(54.15)
и индуктирует в ней ЭДС взаимной индукции
. (54.16)
54.4. Эвивалентирование МДС обмоти яоря
в ненасыщенной машине
Магнитодвижущая сила обмотки якоря F
am
и ее продольная и по-
перечная составляющие F
dm
, F
qm
отличаются по форме от МДС об-
мотки возбуждения F
f
. Магнитодвижущая сила якоря распределена
по поверхности синусоидально; распределение МДС возбуждения
значительно отличается от синусоидального. Это обстоятельство за-
трудняет сложение МДС якоря и возбуждения. Поэтому для упроще-
ния расчетов синусоидальные МДС якоря заменяются эквивалентны-
ми МДС обмотки возбуждения, выбранными по условиям сохране-
ния основных гармонических индукции в зазоре, и ЭДС, индуктиро-
ванных в обмотке якоря.
Продольная МДС якоря F
dm
, образующая поле с основной гармо-
нической индукции B
ad1m
= k
d
B
adm
= k
d
μ
0
F
dm
/(δk
δ
), заменяется МДС
k
q
B
aq1m
B
aqm
----------------
=
δ′
m
/ δ′
Ф
aqm
2
π
---
τl
δ
B
aq1m
2
π
---
τl
δ
k
q
B
aqm
==
E
–
aq
j
ωΨ
–
aqm
2
-------------------
–=