Hassani S. Mathematical Physics: A Modern Introduction to Its Foundations
Подождите немного. Документ загружается.

12.4
EIGENVECTORS
OF
L
2:
SPHERICAL
HARMONICS
343
The first few spherical harmonics with positive m are given below. Those with
negative
m can be obtained using Equation (12.36).
[g
S .
Y21 = -
_e
up
sinecos
e,
8rr
For
1=
0,
Fori
= I,
For
1=
2,
For I = 3,
I
Yoo
=
v'4Jt'
If
a
·
YlO
= - cos II, Yl1 = -
-e'~
sin II.
4rr 8rr
{f
2
Y20 =
-(3cos
II -
I),
16rr
/lf
s u«
·2
Y22 =
--e
T sm II.
32rr
hf
3
Y30 =
-(Scos
II - 3cos II),
16rr
/if
l . 2
Y31
= -
-e'~
sinll(Scos II -
I),
64rr
~
O
S
2 2 /lfS 3 3
Y32
=
--e
HPsin
(}cosO,
Y33
= -
--e
HPsin
6.
32rr
Mrr
From Equations (12.13), (12.18), and (12.34) and the fact that a =
1(1
+ I)
for some nonnegative integer I, we obtain
which gives
I d(.
dPt)
m
2
m m
--
smll--
-
--PI
+l(l +
I)P
I
=
O.
sin IIdll dll sin
211
As before, we let u = cos IIto obtain
d[ 2
dPt]
[ m
2
]
m
-
(l-u)-
+
1(1+1)---2
PI
=0.
du
du.
1-
u
(12.38)
associated
Legendre
differential
equation
This is called the associated
Legendre
differential equation. Its solntions, the
associated Legendre functions, are given in closed form in Equation (12.33). For
m = 0, Equation (12.38) reduces to the Legendre differential equation whose
solutions, again given by Equation (12.33) with m = 0, are the Legendre polyno-
mials encountered in Chapter 7. When
m = 0, the spherical harmonics become
q.>-independent.
This correspondsto aphysicalsituationin which there isan explicit
azimuthal symmetry.
In
such cases (when it is obvious that the physicalproperty in
question does not depend on
q.»
a Legendre polynomial, depending only on cos II,
will multiply the radial function.
344
12.
SEPARATION
OF
VARIABLES
IN
SPHERICAL
COOROINATES
12.4.1 Expansion of Angular Functions
The orthonormality
of
spherical harmonics can be utilized to expand functions
of IJand
rp
in terms
of
them. The fact that these functions are complete will be
discussed in a general way in the context of Sturm-Liouville theory. Assuming
completeness for now, we write
{
L~o
L~=-I
aIm
Ylm
(IJ,
rp)
f(IJ,
rp)
=
L~'=-l
aIm
Ylm
(IJ,
rp)
if
1is not fixed,
if
1is fixed,
(12.39)
where we have includedthe case where it is knowna priori that
f
(IJ,
rp)
has agiven
fixed
1value. To find aIm,we multiply both sides by
Yl~
(IJ,
rp)
and integrate over
the solid angle. The result, obtained by using the orthonormality relation, is
(12.40)
where
dn
es sin
IJ
dIJ
dtp is the element
of
solid angle. A useful special case
of
this formula is
alt
1
=
ff
dnf(IJ,
rp)Y1t(IJ,
rp)
=
)21/
I
ff
dnf(IJ,
rp)
PI(cos
IJ),
11:
(12.41)
where we have introduced an extra superscript to emphasize the relation of the
expansion coefficients with the function being expanded. Another useful relation
is obtained when we let
IJ
= 0 in Equation (12.39):
{
L
~
O
L~=-l
almYlm(IJ,
rp)19=O
f(IJ,
rp)19=O
=
L~=-l
aimYlm
(IJ
,
rp)19=O
if 1is not fixed,
if 1is fixed.
From Equations (12.33) and (12.34) one can show that
Therefore,
[
L~o
alt
1
/
~t
1
if
1is not fixed,
f(IJ,
rp)19=O
=
a(f)
/21+1
if
1is fixed.
10
41l'
(12.42)
12.4
EIGENVECTORS
OF
L
2;
SPHERICAL
HARMONICS
345
z
y
x
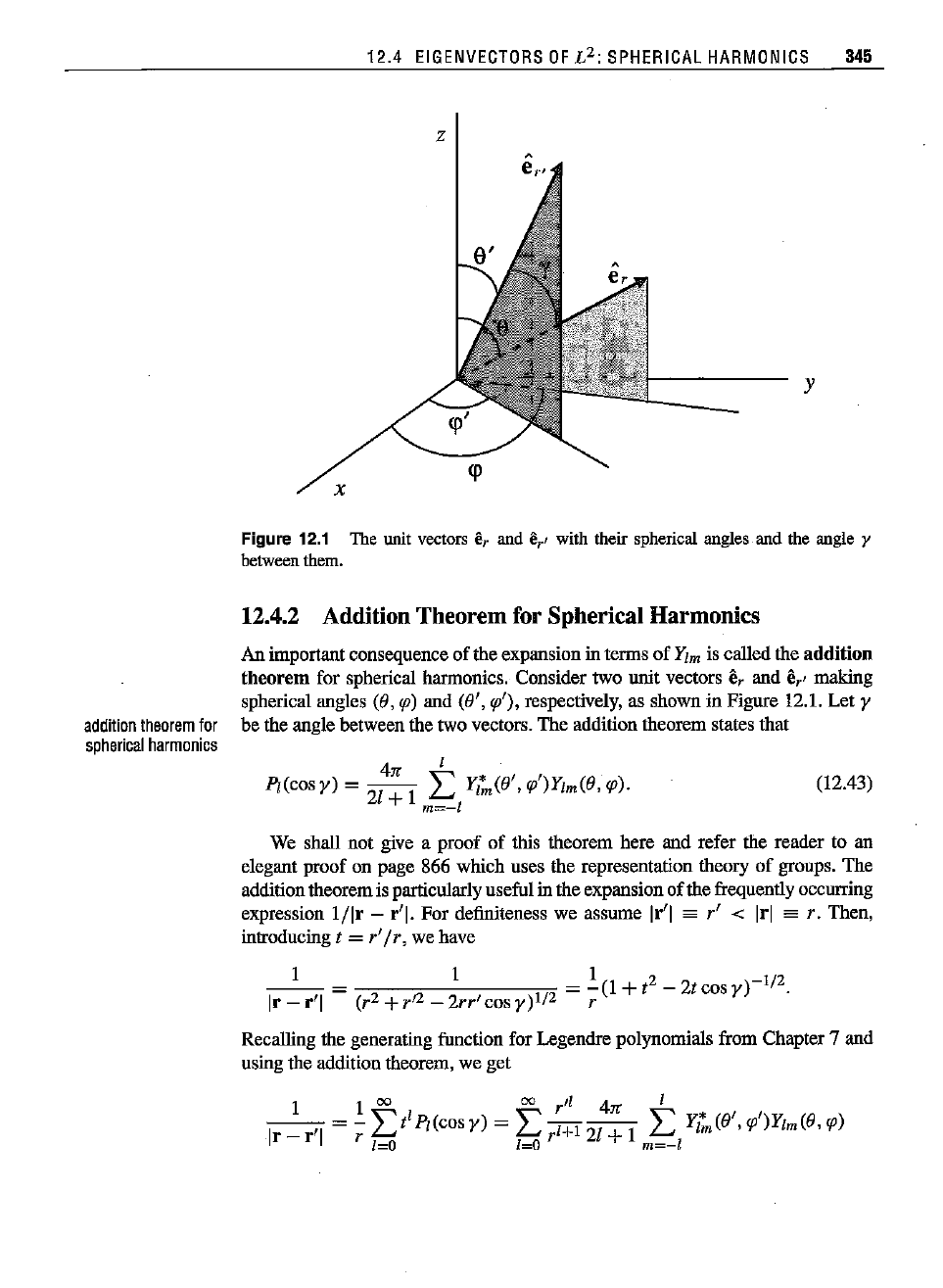
Figure 12.1 The unit vectors e
r
and e
r
,
with their spherical angles and the angle y
betweenthem.
12.4.2 Addition Theorem for Spherical Harmonics
An important consequence of the expansion in terms of
YZ
m
is called the addition
theorem
for spherical harmonics. Consider two unit vectors
e,
and
e"
making
spherical angles
(e,
rp)
and (e', rp'), respectively, as shown in Figure 12.1. Let y
be the angle between the two vectors. The addition theorem states that
addition
theorem
for
spherical
harmonics
Z
4". L * , ,
Pz(cos
y)
=
--
ylm(e ,
rp
)Yzm(e, rp).
2/ +I m=-I
(12.43)
We shall not give a proof of this theorem here and refer the reader to an
elegant proof on page 866 which nses the representation theory
of
groups. The
addition theoremis particularlyuseful in the expansion ofthe frequently occurring
expression
1/lr
- r'[. For definiteness we assume [r'] sa r' < [r] es r, Then,
introducing
t = r'/ r, we have
111
=
=-(I+t
2-2tcosy)-1/2.
[r - r'l (r
2
+ r
tl
-
2rr'
cos
y)I/2
r
Recalling the generating function for Legendre polynomials from Chapter 7 and
using the addition theorem, we get
1 1
00 00
r,l
4". Z
-I
- 'I = -
LtIPI(cosy)
= L 1+1
-2/
1 L Y{;,,(e',rp')Yzm(e,rp)
r r r
[=0 [=0
r +
m=-l
346 12.
SEPARATION
OF
VARIABLES
IN
SPHERICAL
COOROINATES
expansion
of
1/1r
- "I in
spherical
coordinates
It
is clearthat if r <
r',
we shouldexpand in terms
of
the ratio r Ir',
It
is therefore
customary to use r< to denote the smaller and r-; to denote the larger
of
the two
radii
r
and
r'.
Then
the
above
equation
is
written
as
(12.44)
This equation is used frequently in the study
of
Coulomb-like potentials.
12.5 Problems
12.1. By applying the
operator
[Xj,
pkl
to an arbitrary function
fer),
show that
[Xj,
Pk] =
i8jk.
12.2. Use the defining relation Li =
fijkXjPk
to show
thatXjPk
-
XkPj
=
fijkLi.
In both
of
these expressions a sum over the repeated indices is understood.
12.3. For the angular momentum operator Li
=
EijkX
j
Pko
show that the commu-
tationrelation
[Lj
, Lk] =
iEjktLI
holds.
12.4. Evaluate
aflay and af/az in spherical coordinates and find L
y
and L
z
in
terms
of
spherical coordinates.
12.5. Obtain an expression for
L
2
in terms
of
8 and
<fl,
and substitnte the result in
Equation (12.12) to obtainthe Laplacian in spherical coordinates.
12.6. Show that
L
2
=
L+L
+L; - L
z
and
L
2
=L_L+ +L; +L
z
.
12.7. Show that
L
2
, Lx, L
y
, and L
z
are hermitian operators in the space
of
square-
integrable functions.
12.8. Verify the following commutation relations:
12.9. Show that
L_IY.p)
has
fJ
-I
as its eigenvalueforL
z
,and that
IY.,P±) cannot
be
zero.
12.10. Show that if the IYjm) are normalized to mtity, then with properchoice
of
phase, L IYjm) = ..;
j(j
+
I)
-
m(m
- I)
IYj,m-l).
12.11. Derive Equation (12.35).
12.5
PROBLEMS
347
12.12. Starting with Lx and L
y
, derive the following expression for L±:
L± =
e±i.
(±~
+i
cotO~).
ao
arp
12.13. Integrate
dP/dO
-I
cotOP = 0 to find P(O).
12.14. Verify the following differential identity:
(:0
+n cot 0)
j(O)
=
sin~
O:e
[sin" OJ(O)].
12.15.
Letl
= I' and m = m' = 0 in Equation(12.30), and substitnte for
YIO
from
Equation (12.28) to obtain
Al
= ../(21 +1)/4"..
12.16. Show that
(-Ile-i(l-kl.
d
k
LiYI,-/(U,
rp)
=
c;
(I
_ u
2)(l-k)/2
duk
[(I
- u
2)/].
12.17. Derive the relations Y/,-m(O,
rp)
=
(_l)mY/:
m
(0,
rp)
and
(
I -
m)1
P-m(O) =
(_I)m
. pm(O).
/
(I+m)!
/
12.18. Show that
I:~=-I
IYlm(O,
rp)1
2
= (21+
1)/(4".).
Verify this explicitly for
1=landl=2.
12.19. Show that the addition theorem for spherical harmonics can be written as
p/(cosy)
= PI(cosO)PI(cos
0')
/ (I -
m)'
+2 I:: .
Pt(cos
O)Pt
(cos
0')
cos[m(rp _ rp')].
m=! (l
+m)!
Additional Reading
1. Morse, P.and Feshbach, M. Methods ojTheoreticalPhysics, McGraw-Hill,
1953. A two-volume classic including a long discussion of the separation
of
variables in many (sometimes exotic) coordinate systems.
2. The angular momentum eigenvalues and eigenfunctions are discussed in
most books on quantnm mechanics. See, e.g., Messiah,
A. Quantum Me-
chanics, volume
IT,
Wiley, 1966.
13 _
Second-Order
Linear
Differential
Equations
The discussion of Chapter 12 has clearly singled out ODEs, especially those of
second order, as objects requiring special attention because most common PDEs
of mathematical physics can be separated into ODEs (of second order). This is
really an oversimplification of the situation. Many PDEs of physics, both at the
fundamental theoretical level (as in the general theory of relativity) and from
a practical standpoint (weather forecast) are nonlinear,
and the method
of
the
separation of variables does not work. Since no general analytic solutions for
such nonlinear systems have been found, we shall confine ourselves to the linear
systems, especially those that admit a separated solution.
With the exceptionof the infinite power series, uo systematicmethodof solving
DEs existedduring the firsthalf
of
the nineteenthcentury. The majorityof solutions
were completely ad hoc and obtained by trial and error, causing frustration and
anxiety among mathematicians.
It
was to overcome this frustration that Sophus
Lie, motivated by the newly developed concept
of
group, took up the systematic
study of DEs in the second half of the nineteenth century. This study not only
gave a handle on the disarrayed area of DEs, but also gave birthto one of the most
beautiful and fundamental branches
of
mathematical physics, Lie group theory.
We shall come back to a thorough treatment
of
this theory in Parts vn and Vlll.
Our main task in this chapter is to study the second-order linear differential
equations (SOLDEs). However, to understand SOLDEs, we need some basic un-
derstanding of differential equations in general. The next section outlines some
essential properties of general DEs. Section 2 is a very briefintroduction to first-
order DEs, and the remainder
of
the chapter deals with SOLDEs.
13.1
GENERAL
PROPERTIES
OF
ODES
349
13.1 General Properties
of
ODEs
The most general ODE can be expressed as
(
dy
d
2y
d
n
y)
F
x,y,
dx'
dx
2
' · · · ' dx
n
=0,
(13.1)
in which F : R
n
+
2
--> R is a real-valued function
of
n +2 real variables. When
F depends explicitly and nontrivially on
dnyjdx
n,
Equation (13.1) is called an
nth-order
ODE. An
ODE
is said to be
linear
if the part of the function F that
includes y and all its derivatives is linear in y. The most general nth-order linear
ODE is
dy
dny
po(x)y
+
P!(x)-d
+...+
Pn(X)-d
=
q(x)
x x
n
for Pn(x)
'"
0,
(13.2)
(13.3)
Pn(x)
'"
0,
where
{pilf=o
and q are functions
of
the independent variable x. Equation (13.2)
is said to be homogeneous
if
q = 0; otherwise, it is said to be inhomogeneous
and q(x) is called the inhomogeneous term.
It
is customary, and convenient, to
define a linear differential operator Lby!
d d
n
L sa po(x) +
P!(x)-
+...+
Pn(x)-,
dx
dx"
and write Equation (13.2) as
homogeneous
and
inhomogeneous
ODEs
L[y]
=q(x).
(13.4)
A solutionofEquation(13.2) or (l3.4)isa single-variablefunction f :R -->R
such that F (x,
f(x),
f'(x),
...
, f(n) (x) = 0, or
L[f]
=
q(x),
for all x in the
domain of definition of
f.
The solution
of
a differential equation may not exist
if
we put too many restrictions on it. For instance,
if
we demand that f : R --> R
be differentiable too many times, we may not be able to find a solution, as the
following example shows.
13.1.1.
Example.
Themostgeneral
solutioo
ofdy/dx =
Ix
Ithat
vaoishes
atx = 0 is
{
l X
2
ifx>O
f(
x) -
~
- ,
-
-tx2
if x
:s
o.
This
function
is
continuous
and
has
first
derivative
f'(x)
= [x],whichis also
continuous
atx =
O.
However,
if we
demand
that
its second
derivative
alsobe
continuous
atx = 0,
we
cannot
finda
solution,
because
f"(x)
=
{+I
if x > 0,
-I
ifx
<0.
1Donotconfusethis
linear
differential
operator
withthe
angular
momentum
(vector)
operator
L.
350 13.
SECOND-ORDER
LINEARDIFFERENTIAL
EQUATIONS
If
we want 1
m
(x)
to exist at x = 0, then we have to expand the notion of a function to
includedistributions,or generalizedfunctions. II
.Overrestricting a solution for a differeutial equation results in its absence, but
underrestricting it allows multiple solutions. To strike a balancebetweenthese two
extremes, we agree to make a solutionas manytimes differentiableas plausible and
to satisfy certaiu initial conditions.
For
an nth-order DE such initial conditions
are commonly equivalent (but not restricted) to a specification
of
the function and
of
its first n - I derivatives. This sort
of
specification is made feasible by the
following theorem.
implicit
function
13.1.2.
Theorem.
(implicit functiou theorem) Let G :
JRn+l
-->
lR,
given by
theorem
G(Xl,
X2,
...
,
Xn+l)
E
JR,
have continuous partial derivatives up to the kth
order in some neighborhood
of
a point Po = (rl,
ru
...
, r,,+I) in JRn+l Let.
(8Gj8x
n+I)lpo
i'
O.
Then there exists a unique function F :
JRn
-->
JR
that is
continuously differentiable k times at (some smaller) neighborhood
of
Po
such
that
Xn+1
= F(Xl,
X2,
...
,xn)for
all points P = (Xl,X2,
...
,Xn+l) in a neigh-
borhood
of
Poand
G(Xl,
X2,
...
, X
n,
F(XI,
X2,
...
, x
n))
=
O.
Theorem 13.1.2 simply asserts that under certain (mild) conditions we can
"solve" for one
of
the independent variables in G(XI,
X2,
...
,x
n
+!) = 0 in terms
of
the others. A proof
of
this theoremis usually givenin advanced calcnlus books.
Application
of
this theorem to Equation (13.1) leads to
dny
( dy d
2y
d
n-
1
y)
dxn=F
x'Y'dx'dx
2""'dx
n-
1
'
provided that G satisfies the conditions
of
the theorem.
If
we know the solution
y =
f(x)
and its derivatives up to order n -
I,
we can evaluate its
nth
derivative
using this equation. In addition, we
can
calculate the derivatives
of
all orders
(assuming they exist) by differentiating this equation. This allows us to expand
the solution in a Taylor series.
Thus-for
solutions that have derivatives
of
all
orders-knowledge
of
the value
of
a solution and its first n - I derivatives at a
point
Xo
determines that solution at a neighboring point
x.
We shall not study the general
ODE
of
Equation (13.1) or even its simpler
linear versiou(13.2). We will only briefly study ODEs
of
the first order in the next
section, and then concentrate on linear ODEs
of
the second order for the rest
of
this chapter.
13.2 Existence
and
Uniqueness for First-Order DEs
A general first-order DE (FODE) is
of
the form
G(x,
y, y') =
O.
We can find y'
(the derivative
of
y) in terms
of
a function
of
x and y
if
the function G(Xl, x2,
X3)
(13.6)
the
most
general
FODE
In
normal
form
explicit
solution
toa
general
first-order
linear
differential
equation
13.2
EXISTENCE
AND
UNIQUENESS
FOR
FIRST-ORDER
DES
351
is differentiablewith respect to its third argument and
aGjax3
0;
O.
In that case
wehave
, dy
y sa - =
F(x,
y),
(13.5)
dx
which is said to be a normal FODE.
If
F(x, y) is a linear function of y, then
Equation (13.5) becomes a first-orderlinear DE (FOLDE), which can generally
be written as
dy
PI(X)-
+
po(x)y
=
q(x).
dx
It
canbe shownthat the generalFOLDEhas an explicit solution: (see [Hass99])
13.2.1.
Theorem. Anyfirst order linear DE
of
theform PI(x) y' +Po(x)Y = q(x),
in which po, PI, and q are continuous functions in some interval (a, b), has a
generalsolution
(13.7)
(13.8)
whereC is anarbitrary constantand
f1-(x)
=
_1_
exp [l
X
po(t)
dt]
,
PI(X)
xo
PI(t)
where
Xo
and Xl are arbitrary points in the interval (a, b).
No suchexplicitsolutionexists for nonlinearfirst-orderDEs. Nevertheless, it
is reassuringto knowthat a solution of such a DE alwaysexists and under some
mildconditions,thissolutionisunique.Wesummarizesomeof the ideasinvolved
intheproofoftheexistenceanduniqueuessofthesolutionstoFODEs.(Forproofs,
seethe excellentbookby Birkhoffand Rota [Birk
78].) Wefirststateanexisteuce
theoremdue to Peano:
Peano
existence
13.2.2. Theorem. (Peanoexistencetheorem)
If
thefunction F
(x,y)
is continuous
theorem
for the points on andwithin the rectangle defined by Iy
-cl
::s
K and Ix-01
::s
N,
and
if
IF(x, y) I
::s
M there, then the differential equation y' = F(x, y) has at
least one solution, y =
f(x),
definedfor [x -
01
::s
min(N,
K j M) and satisfying
the initial condition
f(a)
==
c.
Thistheoremguaranteesonlytheexistenceofsolutions.Toensureuniqueness,
thefunction F needsto havesomeadditionalproperties.An iroportantpropertyis
statedin the followingdefinition.
Lipschitz
condition
13.2.3. Definition. Afunction
F(x,
y) satisfies a Lipschitzcondition in a domain
D
C
IR
z
iffor
somefinite constantL (Lipschitzconstant),it satisfies the inequality
IF(x,
YI) -
F(x,
yz)1 s LIYI - yzl
for all points (x,
YI) and (x, yz) in D.
352 13.
SECOND-ORDER
LINEAR
DIFFERENTIAL
EQUATIONS
uniqueness
theorem
13.2.4.
Theorem.
(uoiqueness theorem) Let f (x) and
g(x)
be any two solutions
of
the FODE y' =
F(x,
y) in a domain D, where F satisfies a Lipschitz condition
with Lipschitz constant L. Then
If(x)
- g(x)1 :::
eLlx-allf(a)
- g(a)l.
In particular, the FODE has at most one solution curve passing through the point
(a, c) E D.
The final conclusion of this theorem is an easy cousequence
of
the assumed
differentiability
of
F and the requirement
f(a)
= g(a) = c. The theorem says
that
if
there is a solution y =
f(x)
to the DE y' =
F(x,
y) satisfyiog
f(a)
=c,
then it is
the solution.
The requirements of the Peano existence theorem are too broad to yield so-
lutions that have some nice properties.
For
iostance, the ioterval
of
definition of
the solutions may depend on their initial values. The followiog example illustrates
this poiot.
13.2.5.
Example.
Consider the
DEdyldx
= e
Y
•
ThegeneralsolntinnofthisDEcanbe
obtained
by
direct
integration:
«»
dy = dx
=}
-e-
Y
= x + C.
Ify
= b whenx = 0,thenC =
_e-
h
,
and
e-
Y
=
-x
+
e-
h
=}
y =
_In(e-
h
- x).
Thus,
thesolution is
defined
for
-00
< x <
e-
b
,
ie.,
-the
interval
of
definition
of asolution
changes
withits initialvalue.
l1li
To avoid situations illustrated io the example above, one demands not
just
the
continuity of
F
-as
does the Peano existence
theorem-but
a Lipschitz condition
forit. Thenone ensuresnot only theexistence, butalso theuniqueness:
local
existence
and
uniqueness
theorem
13.2.6.
Theorem.
(local existenceanduniquenesstheorem)Suppose thatthefunc-
tion
F(x,
y) is defined and continuous in the rectangle Iy - c] :S K, Ix - al ::: N
and satisfies a Lipschitz condition there.
Let
M = max IF(x,
y)l
in this rectan-
gle. Then the differential equation y'
=
F(x,
y) has a unique solution y =
f(x)
satisfying
f(a)
= c and defined on the interval Ix - al :S
mio(N,
KIM).
13.3 GeneralProperties of SOLDEs
The most general SOLDE is
d
2y
dy
P2(X)-2
+PI
(x)-d
+
po(x)y
= P3(X).
dx
x
(13.9)