Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 695
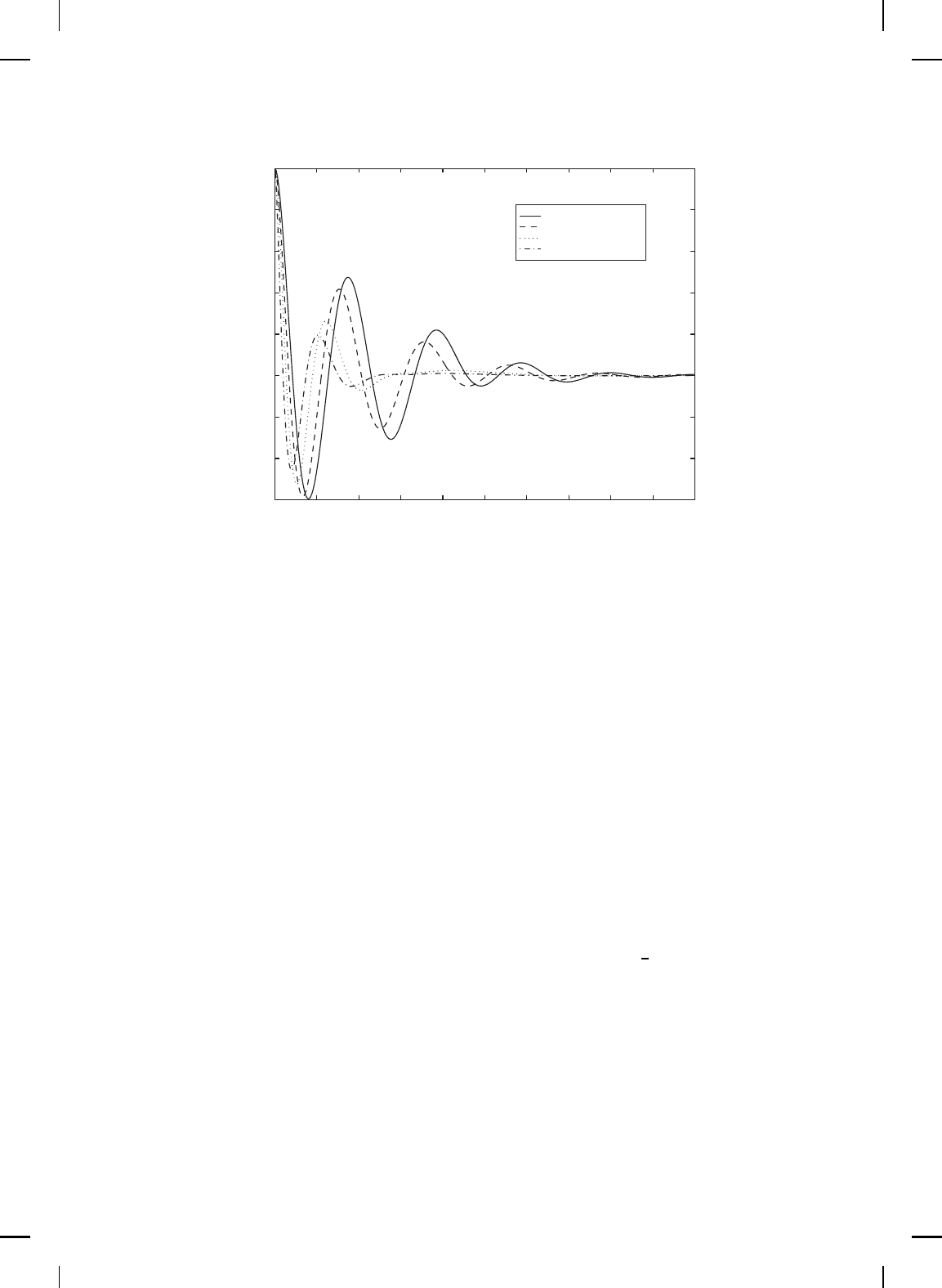
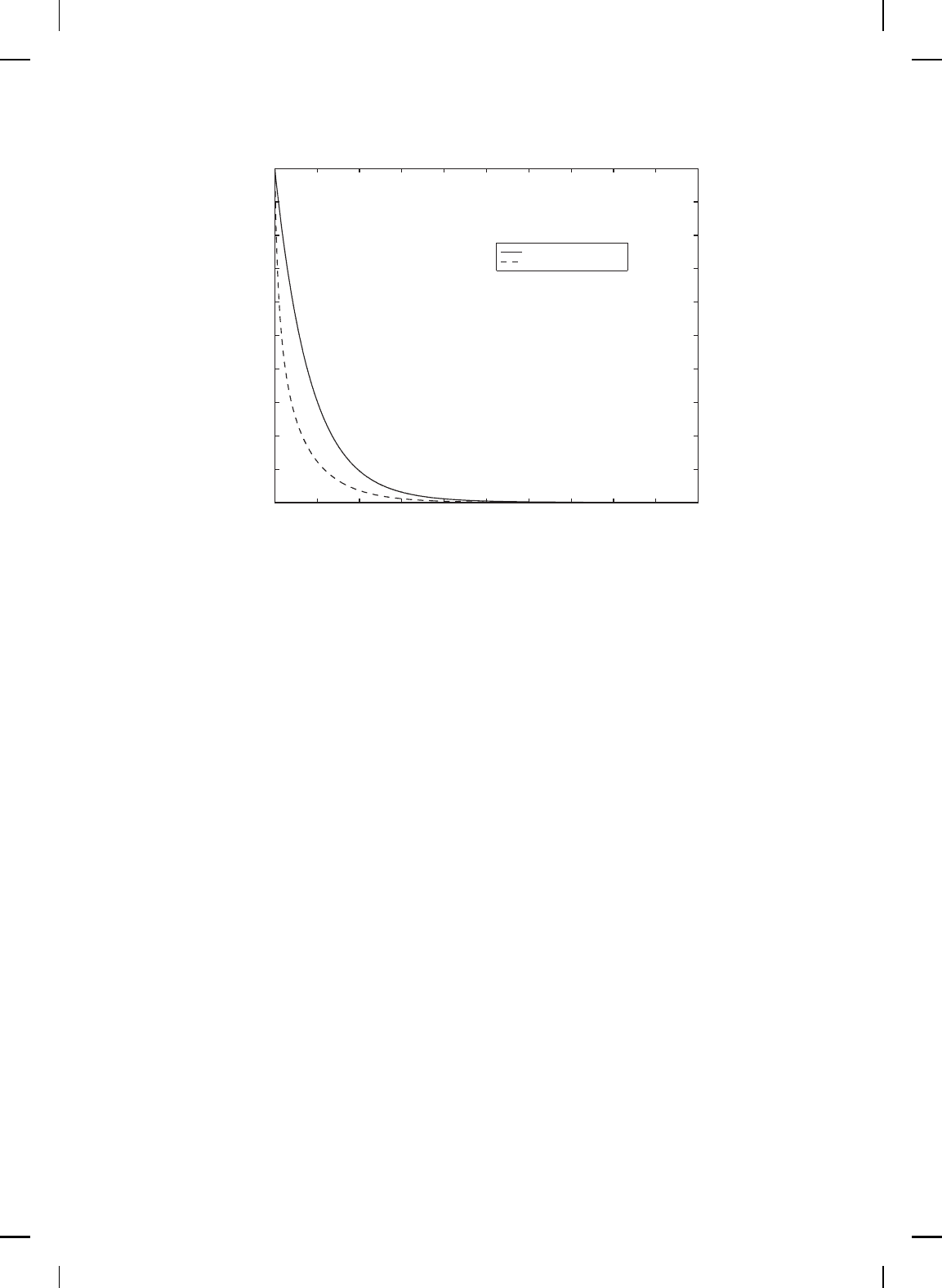
LQR
Speyer
Robust LQR
Robust Nonlinear
0 1 2 3 4 5 6 7 8 9 10
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
time (sec)
position of mass 1
Figure 11.6 Comparison of LQR, Speyer, robu st LQR, and robust nonlinear controllers
for the uncertain system: Position of mass 1.
Theorem 11.6. Consider the linear uncertain controlled system
˙x(t) = (A + ∆A)x(t) + Bu, x(0) = x
0
, t ≥ 0, (11.200)
where u(·) ∈ U is admissible and ∆A ∈ ∆
A
. Assume there exist Ω : N
n
→
N
n
, P ∈ P
n
,
ˆ
Ω
ν
: N
(2ν,n)
→ N
(2ν,n)
, and
ˆ
P
ν
∈ N
(2ν,n)
, ν = 2, . . . , r, such
that
∆A
T
P + P ∆A ≤ Ω(P ), ∆A ∈ ∆
A
, (11.201)
ˆ
Ω
ν
(
ˆ
P
ν
) −
ˆ
P
ν
(
2ν
⊕ ∆A) ∈ N
(2ν,n)
, ∆A ∈ ∆
A
, ν = 2, . . . , r, (11.202)
0 = A
T
P + P A + R
1
− P SP + Ω(P ), (11.203)
and
0 =
ˆ
P
ν
[
2ν
⊕ (A −SP )] +
ˆ
R
2ν
+
ˆ
Ω
ν
(
ˆ
P
ν
), ν = 2, . . . , r. (11.204)
Then, with the feedback control u = φ(x) = −R
−1
2
B
T
(P x +
1
2
g
′
T
(x)), where
g(x)
△
=
P
r
ν=2
ˆ
P
ν
x
[2ν]
, th e zero solution x(t) ≡ 0 of the uncertain system
(11.200) is globally asymptotically stable for all x
0
∈ R
n
and ∆A ∈ ∆
A
,
and the performan ce functional (11.127) satisfies
sup
∆A∈∆
A
J
∆A
(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = x
T
0
P x
0
+
r
X
ν=2
ˆ
P
ν
x
[2ν]
0
, (11.205)
NonlinearBook10pt November 20, 2007
696 CHAPTER 11
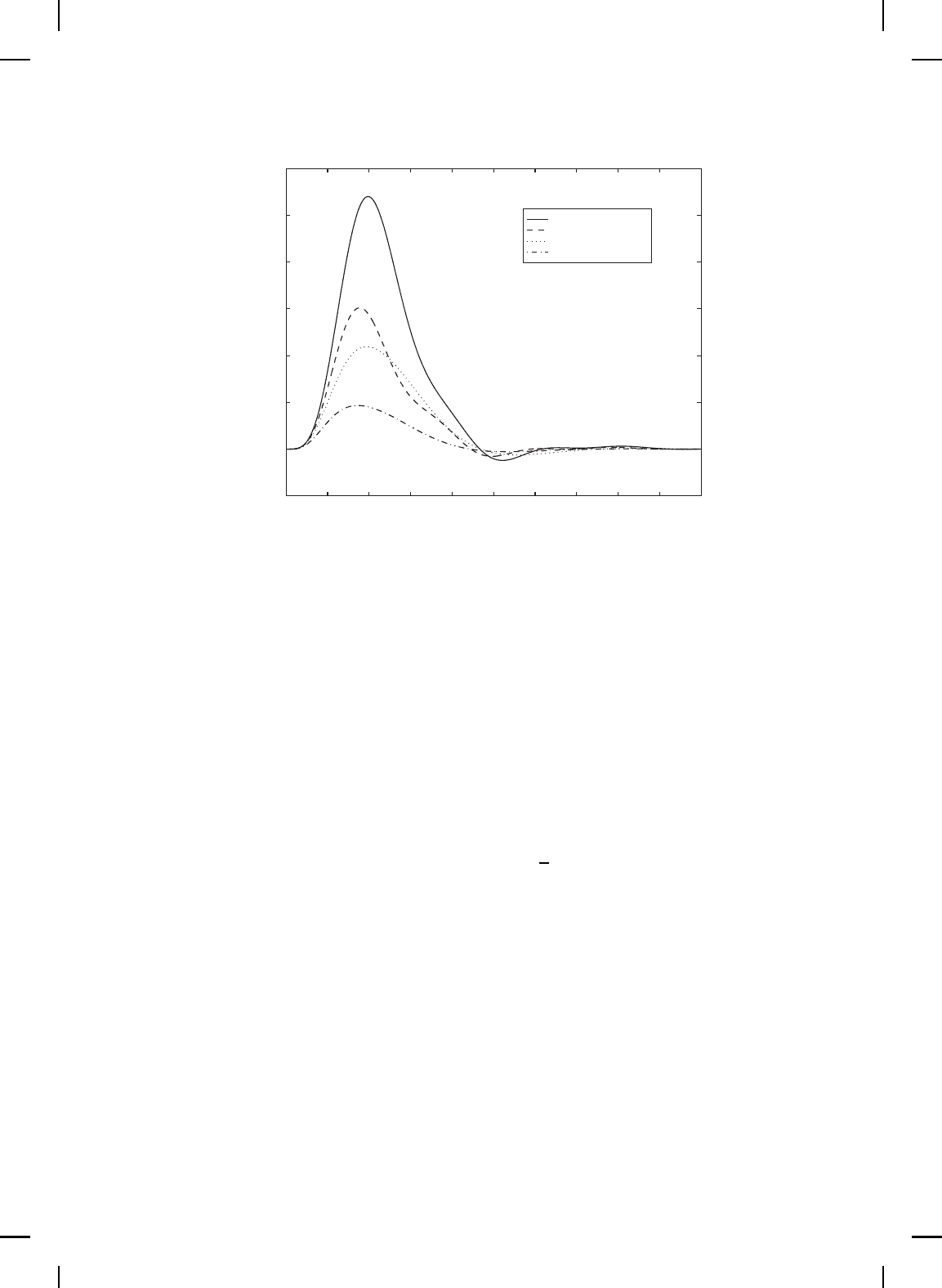
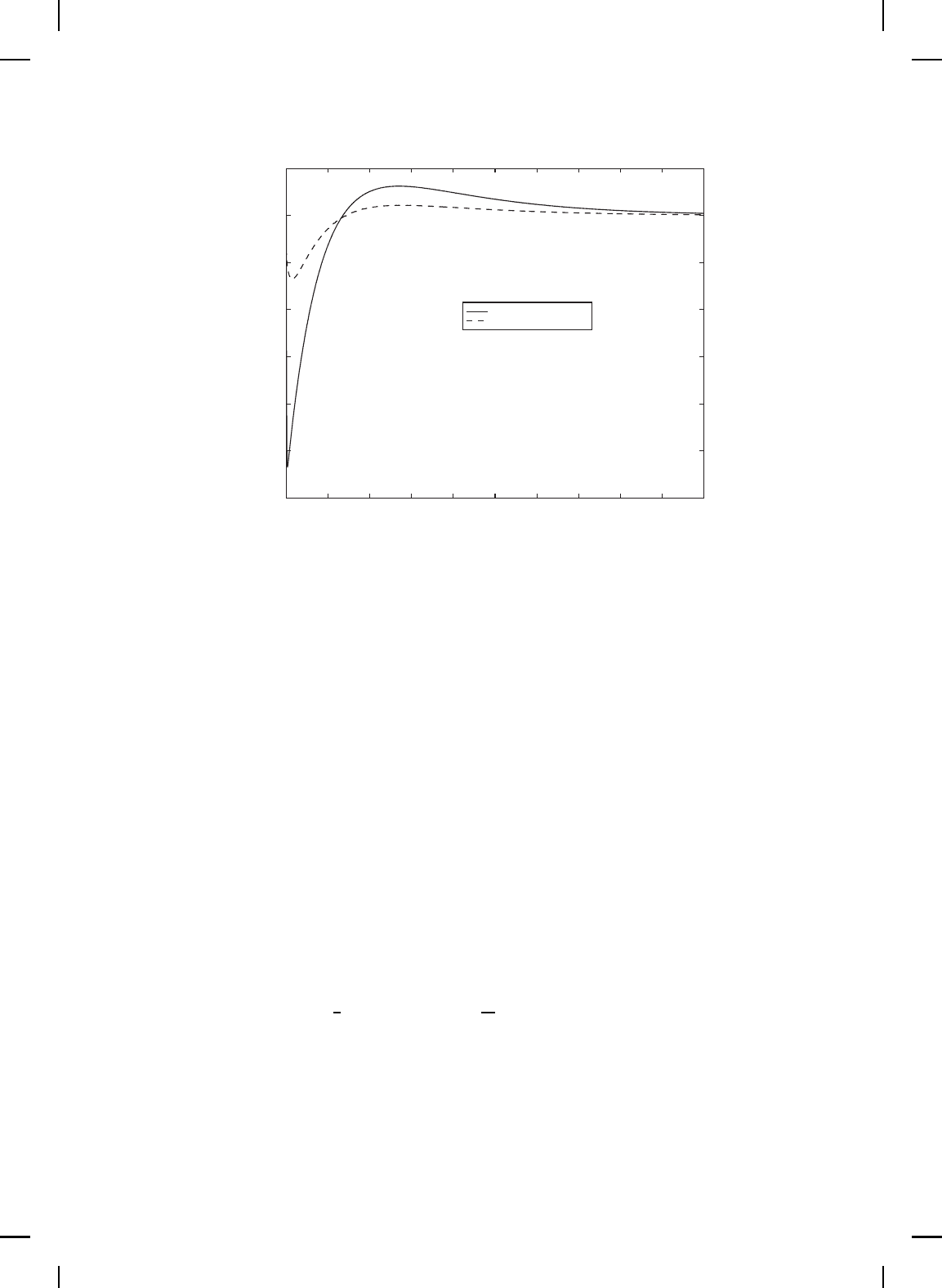
LQR
Speyer
Robust LQR
Robust Nonlinear
0 1 2 3 4 5 6 7 8 9 10
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
time (sec)
position of mass 3
Figure 11.7 Comparison of LQR, Speyer, robu st LQR, and robust nonlinear controllers
for the uncertain system: Position of mass 3.
where
J(x
0
, u(·))
△
=
Z
∞
0
[L(x, u) + Γ(x, u)]dt, (11.206)
and where u(·) is admissible, and x(t), t ≥ 0, solves (11.200) with ∆A = 0
and
Γ(x, u) = x
T
Ω(P )x +
r
X
ν=2
ˆ
Ω
ν
(
ˆ
P
ν
)x
[2ν]
,
where u(·) is admissible and ∆A ∈ ∆
A
. In addition, the performance
functional (11.127), with R
2
(x) = R
2
, L
2
(x) = 0, and
L
1
(x) = x
T
R
1
x +
r
X
ν=2
ˆ
R
2ν
x
[2ν]
+
1
4
g
′
(x)Sg
′
T
(x)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)), (11.207)
where S(x
0
) is the set of regulation controllers for the nominal system and
x
0
∈ R
n
.
Proof. The result is a direct consequence of Corollary 11.4 with
f
0
(x) = Ax, G
0
(x) = B, ∆f(x) = ∆Ax, ∆G(x) = 0, ∆
f
= ∆
A
, and
V (x) = x
T
P x +
P
r
ν=2
ˆ
P
ν
x
[2ν]
. Specifically, conditions (11.128)–(11.162) are
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 697
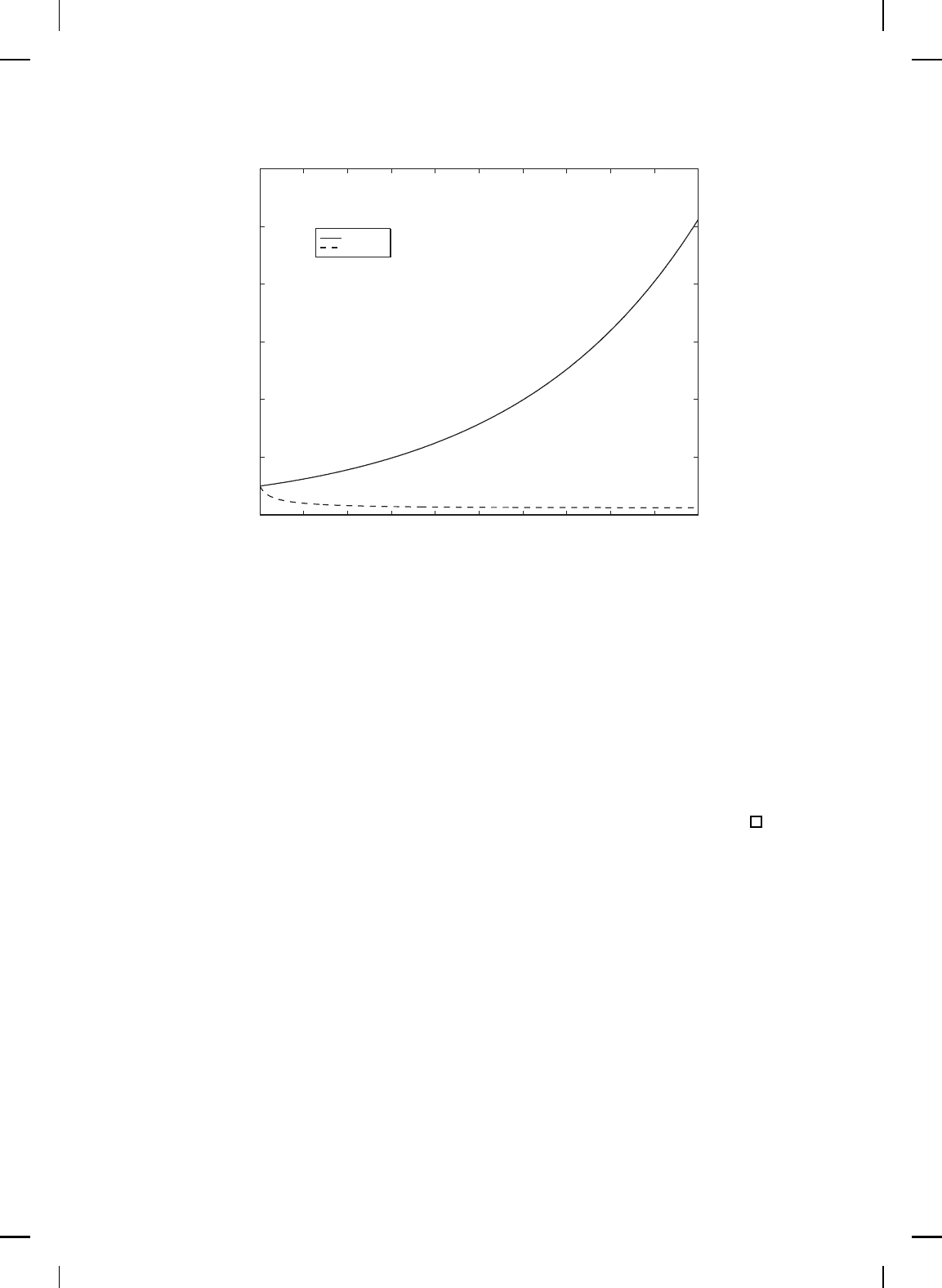
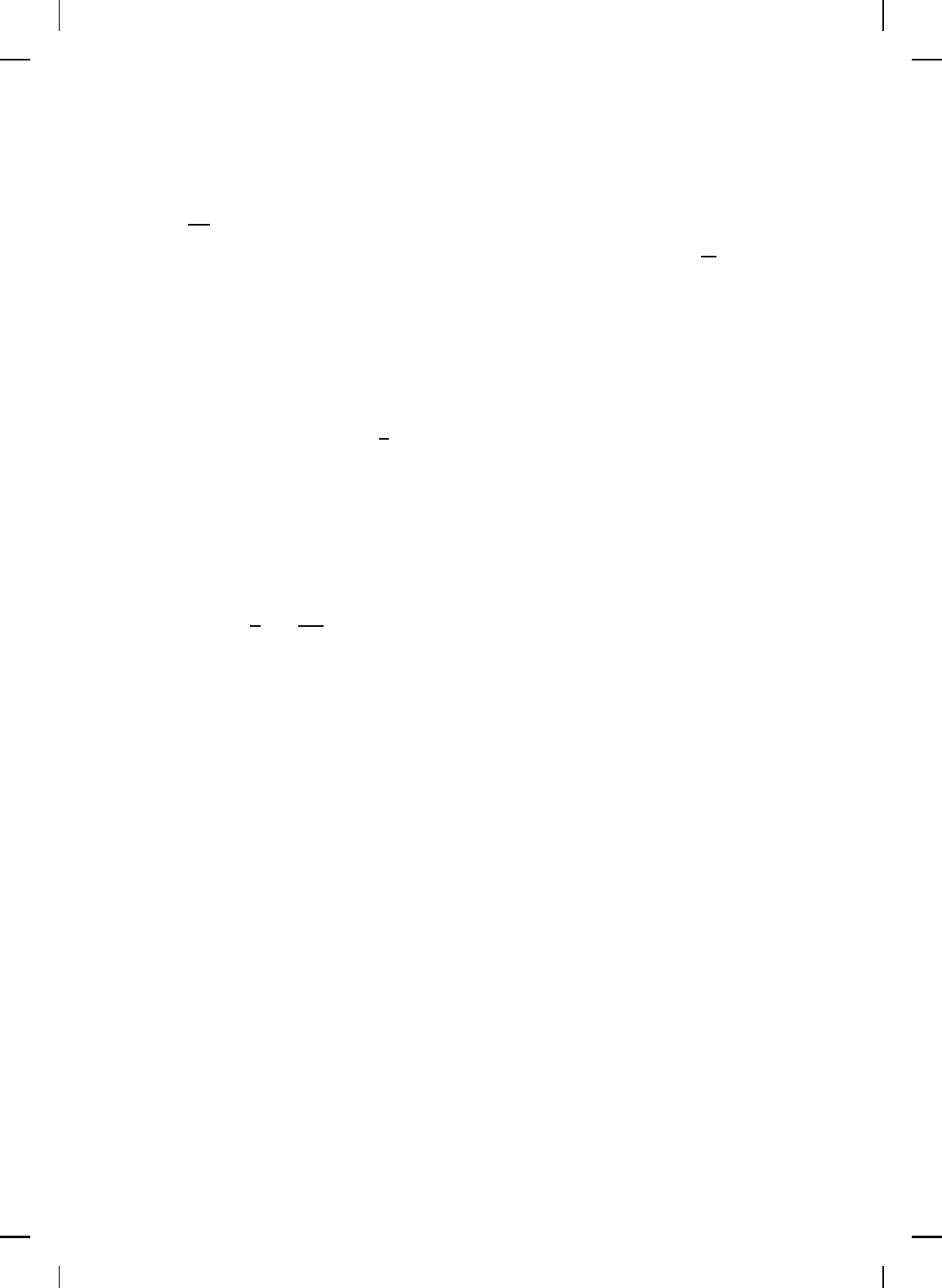
LQR
Speyer
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
1
2
3
4
5
6
time (sec)
angle of attack (rad)
Figure 11.8 Comparison of LQR and Speyer controllers for the uncertain system: Angle
of attack.
trivially satisfied. Now, it follows from (11.201) and (11.202) that
x
T
(∆A
T
P + P ∆A − Ω (P ))x +
r
X
ν=2
[
ˆ
P
ν
(
2ν
⊕ ∆A) −
ˆ
Ω
ν
(
ˆ
P
ν
)]x
[2ν]
≤ 0, x ∈ R
n
,
which implies (11.133) for all ∆A ∈ ∆
A
so that all the conditions of
Corollary 11.4 are satisfied.
Note that since g
′
(x)(A−SP )x =
P
r
ν=2
ˆ
P
ν
[
2ν
⊕ (A −SP )]x
[2ν]
it follows
that (11.204) can be equivalently written as
0 = g
′
(x)(A − SP )x +
r
X
ν=2
[
ˆ
R
2ν
+
ˆ
Ω
ν
(
ˆ
P
ν
)]x
[2ν]
,
for all x ∈ R
n
, and hence, it follows from Lemma 8.1 that there exists a
unique
ˆ
P
ν
∈ N
(2ν,n)
such that (11.204) is satisfied. Theorem 11.6 generalizes
the classical resu lts of Bass and Webber [33] to robust nonlinear optimal
control.
NonlinearBook10pt November 20, 2007
698 CHAPTER 11
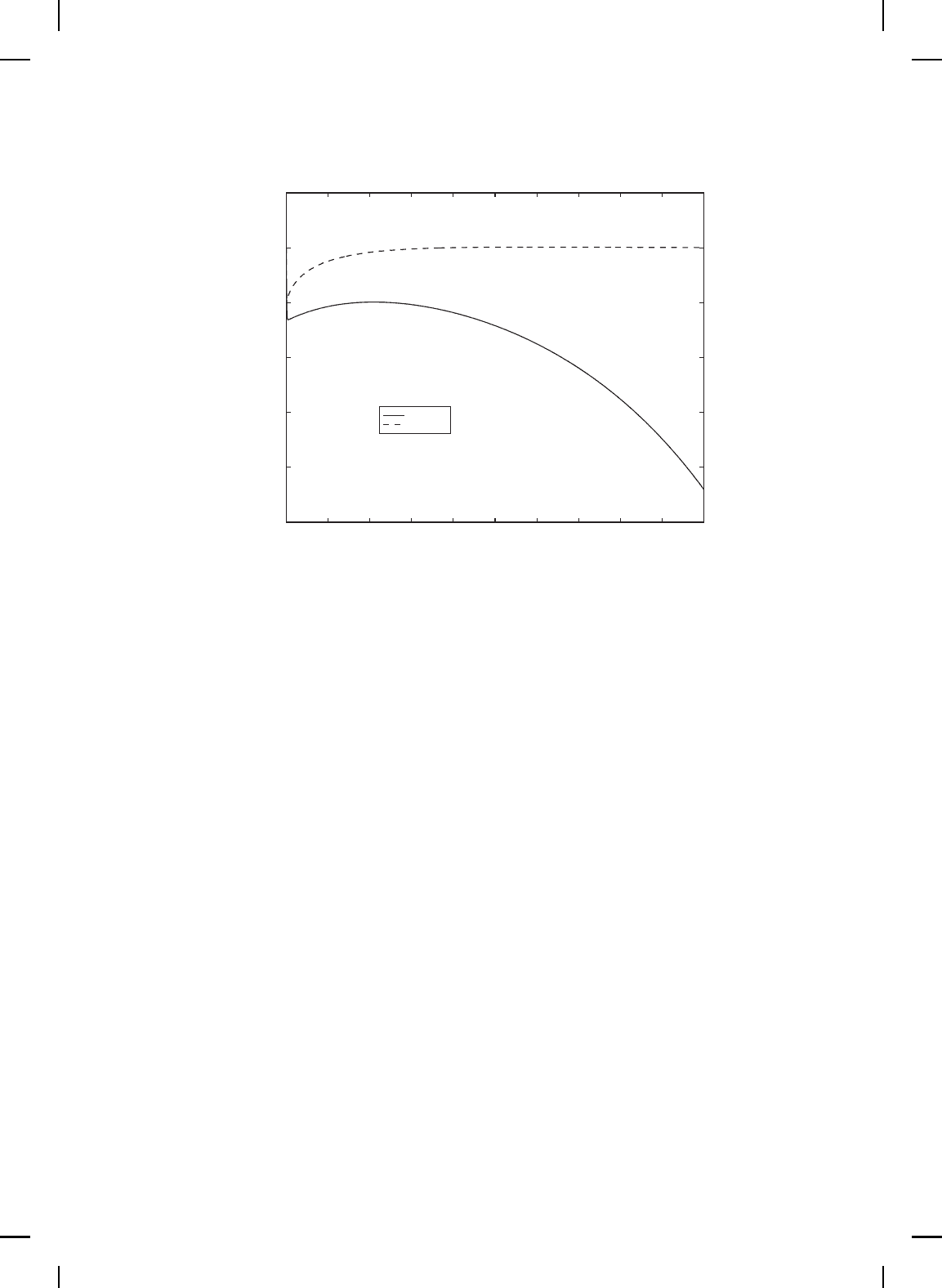
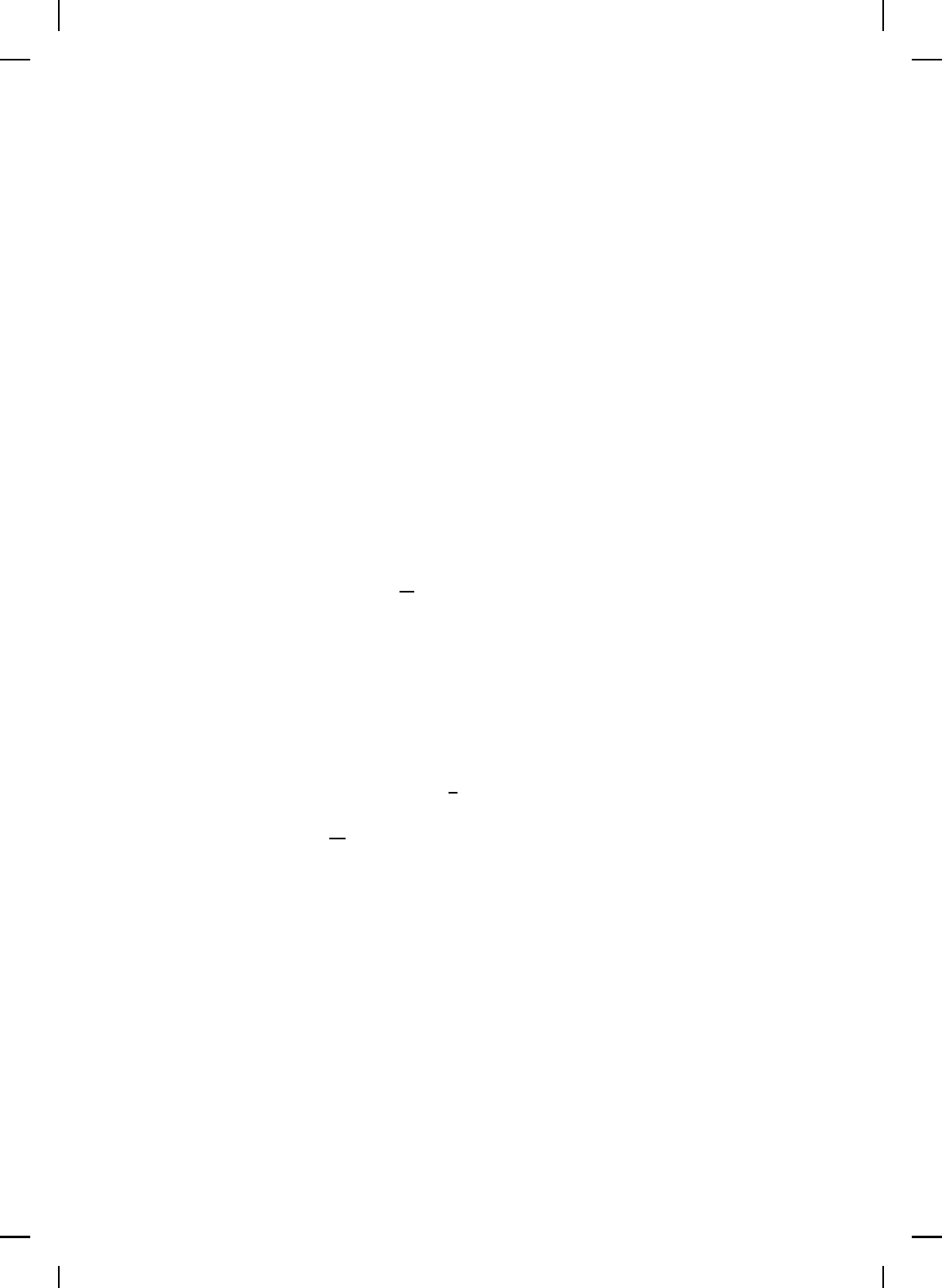
LQR
Speyer
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
time (sec)
pitch rate
Figure 11.9 Comparison of LQR and Speyer controllers for the uncertain system: Pitch
rate.
11.10 Problems
Problem 11.1. Consider the linear oscillator
¨q(t) + 2ζω
n
˙q(t) + ω
2
n
q(t) = 0, q(0) = q
0
, ˙q(0) = ˙q
0
, t ≥ 0, (11.208)
where q, ˙q, ¨q ∈ R, and ζ ∈ [ζ
l
, ζ
u
] and ω
n
denote the damping ratio and
natural frequency, respectively, with ζ
l
and ζ
u
denoting the lower and upper
bounds on ζ. Using x(t) = [q(t), ˙q(t)]
T
, represent (11.208) as (11.50) with
∆
A
given by (11.56).
Problem 11.2. Consider the linear matrix second-order uncertain
dynamical system given by
M ¨q(t) + (C
0
+ ∆C) ˙q(t) + (K
0
+ ∆K)q(t) = 0, q(0) = q
0
, ˙q(0) = ˙q
0
, t ≥ 0,
(11.209)
where q, ˙q, ¨q ∈ R
n
, M
0
, C
0
, and K
0
denote generalized inertia, damping,
and stiffness matrices, respectively, and ∆C and ∆K denote damping and
stiffness uncertainty such that σ
max
(∆C) ≤ γ
−1
d
and σ
max
(∆K) ≤ γ
−1
s
.
Using x(t) = [q(t), ˙q(t)]
T
, represent (11.209) as (11.50) with ∆
A
given by
(11.27).
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 699
Robust LQR
Robust Nonlinear
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
time (sec)
angle of attack (rad)
Figure 11.10 Comparison of robust LQR and robust nonlinear controllers for the
uncertain system: Angle of attack.
Problem 11.3. Consider the uncertainty characterizations
∆
1
△
= {∆A ∈ R
n×n
: ∆A =
p
X
i=1
δ
i
A
i
, |δ
i
| ≤ γ, i = 1, . . . , p}, (11.210)
∆
2
△
= {∆A ∈ R
n×n
: ∆A = B
0
F C
0
, σ
max
(F ) ≤ γ}, (11.211)
where for i = 1, . . . , p, A
i
∈ R
n×n
, B
0
∈ R
n×s
, and C
0
∈ R
s×n
are given, and
γ > 0. Show that ∆
1
is equivalent to ∆
2
in the sense that an uncertainty
set ∆
1
can always be written in the f orm of ∆
2
and vice versa.
Problem 11.4. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by
∆
A
△
= {∆A ∈ R
n×n
: ∆ A =
p
X
i=1
δ
i
A
i
, |δ
i
| ≤ γ
i
, i = 1, . . . , p}. (11.212)
Show that th e function
Ω(P ) =
p
X
i=1
γ
i
|A
T
i
P + P A
i
|, (11.213)
where |S| denotes (S
2
)
1/2
for S ∈ S
n
and (·)
1/2
denotes the (unique)
nonnegative-definite square root, satisfies (11.52) with ∆
A
given by (11.212).
NonlinearBook10pt November 20, 2007
700 CHAPTER 11
Robust LQR
Robust Nonlinear
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
time (sec)
pitch rate
Figure 11.11 Comparison of robust LQR and robust nonlinear controllers for the
uncertain system: Pitch rate.
Problem 11.5. Let f : R → R and define (with a minor abuse of
notation) f : S
n
→ S
n
by f (S)
△
= Uf(D)U
T
, where S = UDU
T
, U is
orthogonal, D is real diagonal, and f (D) is the diagonal matrix obtained
by applying f to each diagonal entry of D . Consider the linear uncertain
system (11.50) where ∆ A ∈ ∆
A
and ∆
A
is given by (11.212). L et f
i
: R →
R, i = 1, . . . , p, be such that f
i
(x) ≥ |x|, x ∈ R. Show that the function
Ω(P ) =
p
X
i=1
γ
i
f
i
(A
T
i
P + P A
i
) (11.214)
is an overbound for Ω(·) given by (11.213) and, hen ce, satisfies (11.52) with
∆
A
given by (11.212). (Hint: Note if f (x) = |x|, then f (S) = (S
2
)
1/2
,
where (·)
1/2
denotes the (unique) nonnegative-definite square root.)
Problem 11.6. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by (11.212). Let β
1
, . . . , β
p
be arbitrary positive
constants. Show that the function
Ω(P ) =
1
4
p
X
i=1
γ
i
β
i
I
m
+
p
X
i=1
(
γ
i
β
i
)(A
T
i
P + P A
i
)
2
(11.215)
is an overbound for Ω(·) given by (11.213) and, hen ce, satisfies (11.52) with
∆
A
given by (11.212).
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 701
Problem 11.7. Let ∆
A
given by (11.212) be defined by the positive
constants γ
1
, . . . , γ
p
and let ∆
A
given by (11.56) be characterized by α
i
=
αγ
i
β
i
1/2
, i = 1, . . . , p, where α
△
=
P
p
i=1
γ
i
β
i
and β
1
, . . . , β
p
are arbitrary
positive constants. Sh ow that the ellipse E
△
= {(δ
1
, . . . , δ
p
) :
P
p
i=1
δ
2
i
α
2
i
≤ 1}
circumscribes the rectangle R
△
= {(δ
1
, . . . , δ
p
) : |δ
i
| ≤ γ
i
, i = 1, . . . , p}, and
hence, ∆
A
given by (11.56) contains ∆
A
given by (11.212).
Problem 11.8. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by (11.56). Let α be an arbitrary positive
constant. Show that the function
Ω(P ) =
α
4
I
n
+ α
−1
p
X
i=1
α
2
i
(A
T
i
P + P A
i
)
2
(11.216)
satisfies (11.52) with ∆
A
given by (11.56).
Problem 11.9. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by (11.56). Let α be an arbitrary positive
constant. Show that for P > 0 th e function
Ω(P ) =
α
2
P +
α
−1
2
p
X
i=1
α
2
i
[A
2T
i
P + A
T
i
P A
i
+ P A
i
P
−1
A
T
i
P + P A
2
i
] (11.217)
satisfies (11.52) with ∆
A
given by (11.56).
Problem 11.10. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by
∆
A
△
= {∆A ∈ R
n×n
: ∆A =
p
X
i=1
δ
i
A
i
, |δ
i
| ≤ γ
−1
, i = 1, . . . , p}, (11.218)
where γ > 0. For i = 1, . . . , p, let α
i
∈ R, β
i
> 0, S
i
∈ R
n×n
and define
Z
i
△
= [(S
i
+ S
T
i
)
2
]
1/2
and
ˆ
I
i
△
= [S
i
A
T
i
][S
i
A
T
i
]
†
. Show that th e function
Ω(P ) =
p
X
i=1
[γ
−2
(α
i
S
i
+ β
i
A
T
i
P )
T
(α
i
S
i
+ β
i
A
T
i
P ) + γ
−1
β
−1
i
|α
i
|Z
i
+ β
2
i
ˆ
I
i
(11.219)
satisfies (11.52) with ∆
A
given by (11.218). (Hint: First show that
ˆ
I
i
=
ˆ
I
T
i
=
ˆ
I
2
i
,
ˆ
I
i
S
i
= S
i
, and A
i
ˆ
I
i
= A
i
.)
Problem 11.11. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by (11.56). Let α be an arbitrary positive
constant and for each P ∈ P
n
, let P
1
∈ R
n×m
and P
2
∈ R
m×n
satisfy
NonlinearBook10pt November 20, 2007
702 CHAPTER 11
P = P
1
P
2
. Show that the function
Ω(P )
△
= αP
T
2
P
2
+ α
−1
p
X
i=1
α
2
i
A
T
i
P
1
P
T
1
A
i
(11.220)
satisfies (11.52) with ∆
A
given by (11.56). Using (11.220) show that the
functions
Ω(P )
△
= αI
n
+ α
−1
p
X
i=1
α
2
i
A
T
i
P
2
A
i
(11.221)
and
Ω(P )
△
= αP
2
+ α
−1
p
X
i=1
α
2
i
A
T
i
A
i
, (11.222)
also satisfy (11.52) with ∆
A
given by (11.56).
Problem 11.12. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by (11.210). Let α > 0, N
i
∈ S
n
, i = 1, . . . , p,
and define N
△
= {P ∈ P
n
: P − N
i
≥ 0, i = 1, . . . , p}. Show that the
function
Ω(P ) =
p
X
i=1
[α(P − N
i
) +
γ
2
α
A
T
i
(P − N
i
)A
i
+ γ|A
T
i
N
i
+ N
i
A
i
|], (11.223)
where |S| denotes (S
2
)
1/2
, satisfies (11.52) with ∆ given by (11.210).
Problem 11.13. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by (11.210). Let α > 0, V
1i
, V
2i
∈ R
n×n
, N
i
∈ S
n
,
i = 1, . . . , p, and define N
△
= {P ∈ P
n
: (P − N
i
) > 0}, i = 1, . . . , p. Show
that the function
Ω(P ) =
p
X
i=1
[α(P − N
i
) +
γ
2
|A
T
i
(V
1i
+ V
T
2i
) + (V
2i
+ V
T
1i
)A
i
|]
+
γ
4α
[A
T
i
(P − V
1i
) + (P − V
2i
)A
i
](P − N
i
)
−1
·[A
T
i
(P − V
1i
) + (P − V
2i
)A
i
]
T
, (11.224)
where |S| denotes (S
2
)
1/2
, satisfies (11.52) with ∆
A
given by (11.210).
Problem 11.14. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by (11.59). Show that if there exists P ∈ P
n
satisfying
0 = A
T
P + P A + γ
−2
P B
0
B
T
0
P + C
T
0
C
0
+ R, (11.225)
where γ > 0 and R > 0, then A + ∆A is asymptotically stable for all
∆A ∈ ∆
A
. Furthermore, show that there exists P ∈ P
n
satisfying (11.225)
if and only if |||C
0
(sI − A)
−1
B
0
|||
∞
< γ.

NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 703
Problem 11.15. Consider the linear uncertain controlled system
(11.109) with ∆ B = 0, ∆A ∈ ∆
A
, where ∆
A
is given by (11.218), and
performance fun ctional (11.110). For i = 1, . . . , p, let α
i
∈ R, β
i
> 0,
S
i
∈ R
n×n
and defi ne Z
i
△
= [(S
i
+ S
T
i
)
2
]
1/2
and
ˆ
I
i
△
= [S
i
A
T
i
][S
i
A
T
i
]
†
. Show
that the zero solution x(t) ≡ 0 to (11.109) is globally asymptotically stable
for all ∆A ∈ ∆
A
with the feedback control φ(x) = −R
−1
2
B
T
P x, where
P > 0 satisfies
0 = A
T
sγ
P + P A
sγ
+ R
1
+
p
X
i=1
[γ
−2
(α
2
i
S
T
i
S
i
+ β
2
i
P A
i
A
T
i
P ) + γ
−1
β
−1
i
|α
i
|Z
i
+β
2
i
ˆ
I
i
] −P BR
−1
2
B
T
P, (11.226)
and A
sγ
△
= A + γ
2
i
P
p
i=1
α
i
β
i
A
i
S
i
.
Problem 11.16. Show that if R ∈ P
n
and
A
△
= A
α
⊕ A
α
+
p
X
i=1
α
2
i
α
A
i
⊗ A
i
is Hurwitz, then there exists a unique P ∈ R
n×n
satisfying (11.64) and
P > 0. Conversely, show that if for all R ∈ P
n
there exists P > 0 satisfying
(11.64), then A, A
α
, and A are Hur witz. (Hint: Use the exponential product
formula e
At
= lim
k→∞
{exp[
1
k
(A
α
⊕ A
α
)t]exp[
1
k
P
p
i=1
α
2
i
α
(A
i
⊗ A
i
)]}.)
Problem 11.17. Let ∆
A
be given by (11.56) and let
ˆ
∆
A
⊆ ∆
A
, where
ˆ
∆
A
is defined as in (11.56) with α
i
replaced by ˆα
i
∈ [0, α
i
], i = 1, . . . , p.
Furth ermore, let R ∈ P
n
, assume A
△
= A
α
⊕A
α
+
P
p
i=1
α
2
i
α
A
i
⊗A
i
is Hurwitz,
and let P ∈ P
n
satisfy (11.64). Show that there exists
ˆ
P ∈ P
n
satisfying
0 = A
T
α
ˆ
P +
ˆ
P A
α
+ α
−1
p
X
i=1
ˆα
2
i
A
T
i
ˆ
P A
i
+ R, (11.227)
and
ˆ
P ≤ P .
Problem 11.18. Show that if
(A ⊕A)
−1
αI
n
2
+ α
−1
p
X
i=1
α
2
i
A
i
⊗ A
i
!
< 1, (11.228)
where k·k den otes an arbitrary submultiplicative norm on R
n
2
, then for all
R ∈ P
n
there exists P ∈ P
n
satisfying (11.64).
Problem 11.19. Let κ, β > 0 satisfy ke
At
k ≤ κe
−βt
, t ≥ 0, where
A is Hurwitz and k · k denotes an arb itrary submultiplicative norm that is
monotonic on N
n
. Show that if R ∈ P
n
and 4αkB
0
B
T
0
k kα
−1
C
T
0
NC
0
+Rk <
NonlinearBook10pt November 20, 2007
704 CHAPTER 11
ρ
2
, where ρ
△
= 2β/κ, then there exists P ∈ P
n
satisfying (11.68).
Problem 11.20. Consider the linear uncertain system (11.50) where
∆A ∈ ∆
A
and ∆
A
is given by
∆
A
△
= {∆A ∈ R
n×n
: ∆A = B
0
F C
0
, F ∈ ∆
bs
}, (11.229)
where ∆
bs
denotes the set of block-diagonal matrices with possibly repeated
blocks defined by
∆
bs
△
= {F ∈ R
s×s
: F = block−diag[I
l
1
⊗ F
1
, I
l
2
⊗ F
2
, . . . , I
l
p
⊗F
p
],
F
i
∈ R
s
i
×s
i
, i = 1, . . . , p}, (11.230)
and the dimen sion s
i
of each block and the number of repetitions l
i
of each
block are given such that
P
p
i=1
l
i
s
i
= s. Furthermore, define the s et of
constant scaling matrices D by
D
△
= {D ∈ R
s×s
: D > 0, DF = F D, F ∈ ∆
bs
}. (11.231)
Show that if there exists P ∈ P
n
satisfying
0 = A
T
P + P A + γ
−2
P B
0
D
−2
B
T
0
P + C
T
0
D
2
C
0
+ R, (11.232)
where γ > 0 and R > 0, then A + ∆A is asymptotically stable for all
∆A ∈ ∆
γ
△
= {F ∈ ∆
bs
: σ
max
(F ) ≤ γ
−1
}. Furthermore, show that there
exists P ∈ P
n
satisfying (11.232) if and only if |||DG(s)D
−1
|||
∞
< γ, where
G(s) = C
0
(sI − A)
−1
B
0
.
Problem 11.21. Consider the linear uncertain system (11.50) and
(11.51) with n = 2,
A =
−ν ω
−ω −ν
, ν > 0, ω ≥ 0, (11.233)
V = E[x
0
x
T
0
] = I
2
, R = I
2
, and ∆A = {∆A : ∆A = δ
1
A
1
, |δ
1
| ≤ α
1
},
where
A
1
=
0 1
−1 0
. (11.234)
Show that (11.53) with Ω(P ) given by (11.213) or (11.219) is nonconservative
with respect to robust stability and performan ce. Alternatively, show that
(11.213) and (11.217) give extremely conservative predictions, especially
when ν is small.
Problem 11.22. Consider the linear dynamical system with state
delay given by
˙x(t) = Ax(t) + A
d
x(t −τ
d
), x(θ) = φ(θ), −τ
d
≤ θ ≤ 0, (11.235)
where x(t) ∈ R
n
, A, A
d
∈ R
n×n
, and φ : [−τ
d
, 0] → R
n
is a continuous
vector-valued fun ction specifying the initial state of the system. Show that