Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 685
−L
1
(x) − Γ
xx
(x)
≤ φ
T
(x)R
−1
2
(x)φ(x) + V
′
(x)G(x)σ(φ(x))
≤
m
X
i=1
r
i
(x)y
i
(y
i
+ 2σ
i
(−y
i
)),
which implies the result.
The following result specializes Theorem 11.3 to linear uncertain
systems.
Corollary 11.6. Consider the uncertain linear dynamical system G
given by (11.109) and (11.169) with ∆B ≡ 0, where φ(x) = −(R
2
+
Ω
uu
(P ))
−1
(B
T
P + Ω
T
xu
(P ))x and where P ∈ P
n
, satisfies (11.111) and
(11.112). Furthermore, assu me R
2
= diag[r
1
, . . . , r
m
], where r
i
> 0,
i = 1, . . . , m. Then the linear system G has a sector (and, hence, gain)
margin (
1
2
, ∞).
Next, we introduce the notion of robust control Lyapunov functions
for the nonlinear dynamical system (11.125).
Definition 11.1. Consider the controlled n on linear dynamical system
given by (11.125). A continuously differentiable positive-definite function
V : R
n
→ R satisfying
V
′
(x)f
0
(x) + Γ
xx
(x) < 0, x ∈ R, (11.171)
where R
△
= {x ∈ R
n
: x 6= 0 : V
′
(x)G(x) = 0}, is called a robust control
Lyapunov func tion.
Finally, we show that for every nonlinear dynamical system for w hich a
robust control Lyapunov function can be constructed there exists an inverse
optimal robust feedback control law with sector and gain margin (
1
2
, ∞).
Theorem 11.4. Consider th e nonlinear dynamical system G given by
(11.125) and let the continuously differentiable positive-definite, radially
unbounded function V : R
n
→ R be a robust control Lyapunov function
of (11.125), that is,
V
′
(x)f
0
(x) + Γ
xx
(x) < 0, x ∈ R, (11.172)
where R
△
= {x ∈ R
n
: x 6= 0 : V
′
(x)G(x) = 0}. Then, with the feedback
control law given by
φ(x) =
−
c
0
+
α(x)+
√
α
2
(x)+(β
T
(x)β(x))
2
β
T
(x)β(x)
β(x), β(x) 6= 0,
0, β(x) = 0,
(11.173)
NonlinearBook10pt November 20, 2007
686 CHAPTER 11
where α(x)
△
= V
′
(x)f
0
(x) + Γ
xx
(x), β(x)
△
= G
T
(x)V
′T
(x), and c
0
> 0, the
nonlinear system G given by (11.125) has a sector (and, hence, gain) margin
(
1
2
, ∞).
Proof. The result is a direct consequence of Corollary 11.5 and
Theorem 11.3 with R
2
(x) =
1
2η(x)
I
m
and L
1
(x) = −α(x) +
η(x)
2
β
T
(x)β(x),
where
η(x) =
−
c
0
+
α(x)+
√
α
2
(x)+(β
T
(x)β(x))
2
β
T
(x)β(x)
, β(x) 6= 0,
0, β(x) = 0.
(11.174)
Specifically, note that R
2
(x) > 0, x ∈ R
n
, and
L
1
(x) = −α(x) +
η(x)
2
β
T
(x)β(x)
=
−
1
2
c
0
β
T
(x)β(x) − α(x)
+
p
α
2
(x) + (β
T
(x)β(x))
2
, β(x) 6= 0,
−α(x), β(x) = 0.
(11.175)
Now, it follows from (11.175) that L
1
(x) ≥ 0, β(x) 6= 0, and s ince V (·)
is a robust control Lyapunov function of (11.125), it follows that L
1
(x) =
−α(x) ≥ 0, for all x ∈ R. Hence, (11.175) yields L
1
(x) ≥ 0, x ∈ R
n
, so that
all the conditions of Corollary 11.5 are satisfied.
11.8 Rob u st Nonlinear Controllers with Polynomial
Performance Criteria
In this section, we specialize the results of Section 11.5 to linear s ys tems con-
trolled by n onlinear controllers that minimize a polynomial cost functional.
Specifically, assume F to be the set of uncertain systems given by
F = {(A + ∆A)x + Bu : x ∈ R
n
, u ∈ R
m
, A ∈ R
n×n
, B ∈ R
n×m
, ∆A ∈ ∆
A
},
(11.176)
where ∆
A
⊂ R
n×n
is a given bounded uncertainty set of the uncertain
perturbation ∆A of the nominal system A such that 0 ∈ ∆
A
. For simplicity
of exposition here and in the remainder of the chapter we assume ∆B = 0.
For the following result recall the definition of S and let R
1
∈ P
n
, R
2
∈ P
m
,
and
ˆ
R
k
∈ N
n
, k = 2, . . . , r, be given where r is a positive integer.
Theorem 11.5. Consider the linear uncertain controlled system
˙x(t) = (A + ∆A)x(t) + Bu(t), x(0) = x
0
, t ≥ 0, (11.177)
where u(·) ∈ U is admissible and ∆A ∈ ∆
A
. Ass ume there exists Ω : P
n
→
N
n
such that
∆A
T
P + P ∆A ≤ Ω(P ), ∆A ∈ ∆
A
, P ∈ P
n
, (11.178)

NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 687
and there exist P ∈ P
n
and M
k
∈ N
n
, k = 2, . . . , r, such that
0 = A
T
P + P A + R
1
+ Ω(P ) −P SP, (11.179)
and
0 = (A − SP )
T
M
k
+ M
k
(A −SP ) +
ˆ
R
k
+ Ω(M
k
), k = 2, . . . , r. (11.180)
Then, w ith the feedback control law
u = φ(x) = −R
−1
2
B
T
P +
r
X
k=2
(x
T
M
k
x)
k−1
M
k
!
x,
the zero solution x(t) ≡ 0 of the uncertain system (11.177) is globally
asymptotically stable for all x
0
∈ R
n
and ∆A ∈ ∆
A
, and the performance
functional (11.127) satisfies
sup
∆A∈∆
A
J
∆A
(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = x
T
0
P x
0
+
r
X
k=2
1
k
(x
T
0
M
k
x
0
)
k
,
(11.181)
where
J(x
0
, u(·))
△
=
Z
∞
0
[L(x, u) + Γ(x, u)]dt, (11.182)
and where u(·) is admissible, and x(t), t ≥ 0, solves (11.177) with ∆A = 0,
and
Γ(x, u) = x
T
(Ω(P ) +
r
X
k=2
(x
T
M
k
x)
k−1
Ω(M
k
))x,
where u(·) is admissible and ∆A ∈ ∆
A
. In addition, the performance
functional (11.127), with R
2
(x) = R
2
, L
2
(x) = 0, and
L
1
(x) = x
T
R
1
+
r
X
k=2
(x
T
M
k
x)
k−1
ˆ
R
k
+
"
r
X
k=2
(x
T
M
k
x)
k−1
M
k
#
T
·S
"
r
X
k=2
(x
T
M
k
x)
k−1
M
k
#!
x,
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)), (11.183)
where S(x
0
) is the set of regulation controllers for the nominal system and
x
0
∈ R
n
.
Proof. The result is a direct consequence of Corollary 11.4 with
f
0
(x) = Ax, G
0
(x) = B, ∆f(x) = ∆Ax, ∆G(x) = 0, ∆ = ∆
A
,

NonlinearBook10pt November 20, 2007
688 CHAPTER 11
and V (x) = x
T
P x+
P
r
k=2
1
k
(x
T
M
k
x)
k
. Specifically, conditions (11.128)–
(11.162) are trivially satisfied. Now, it follows from (11.178) that
0 ≥ x
T
(∆A
T
P + P ∆A −Ω(P ))x
+
r
X
k=2
(x
T
M
k
x)
k−1
x
T
(∆A
T
M
k
+ M
k
∆A − Ω(M
k
))x,
x ∈ R
n
, w hich implies (11.133) for all ∆A ∈ ∆
A
so that all the conditions
of Corollary 11.4 are satisfied.
Theorem 11.5 generalizes the deterministic version of the stochastic
nonlinear-nonquadratic optimal control problem considered in [411] to the
robustness setting. Furthermore, unlike the results of [411], Theorem 11.5
is not limited to sixth order cost functionals and cubic nonlinear controllers
since it addresses a polynomial nonlinear performance criterion. Theorem
11.5 requires the solutions of r − 1 modifi ed Riccati equations in (11.180)
to obtain the optimal robust controller. However, if
ˆ
R
k
=
ˆ
R
2
, k = 3, . . . , r,
then M
k
= M
2
, k = 3, . . . , r, satisfies (11.180). In this case, we r equ ir e the
solution of one modified Riccati equation in (11.180). This special case is
considered in Propositions 11.17 and 11.18 below.
As d iscussed in C hapter 9, the performance functional (11.182) is a
derived performance functional in the sense that it cannot be arb itrarily
specified. However, this performance functional does weight the state
variables by arbitrary even powers. Furthermore, (11.182) has the form
J
∆A
(x
0
, u(·)) =
Z
∞
0
h
x
T
(R
1
+
r
X
k=2
(x
T
M
k
x)
k−1
ˆ
R
k
)x + u
T
R
2
u
+φ
T
NL
(x)R
2
φ
NL
(x)
i
dt,
where φ
NL
(x) is the nonlinear part of the optimal feedback control
φ(x) = φ
L
(x) + φ
NL
(x),
where φ
L
(x)
△
= −R
−1
2
B
T
P x and φ
NL
(x)
△
= −R
−1
2
B
T
P
r
k=2
(x
T
M
k
x)
k−1
M
k
x.
Next, we consider the special case in which r = 2. In this case, note
that if there exist P ∈ P
n
and M
2
∈ N
n
such that
0 = A
T
P + P A + R
1
+ Ω(P ) − P SP
and
0 = (A −SP )
T
M
2
+ M
2
(A −SP ) +
ˆ
R
2
+ Ω(M
2
),
then (11.177), with the performance functional
J
∆A
(x
0
, u(·)) =
Z
∞
0
[x
T
R
1
x + u
T
R
2
u + (x
T
M
2
x)(x
T
ˆ
R
2
x)
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 689
+(x
T
M
2
x)
2
(x
T
M
2
SM
2
x)]dt,
is globally asymptotically stable for all x
0
∈ R
n
and ∆A ∈ ∆
A
with the
feedback control law u = φ(x) = −R
−1
2
B
T
P + (x
T
M
2
x)M
2
x.
Finally, using the explicit uncertainty characterizations given by
(11.121) and (11.122) (with ∆B = 0) we present two specializations of
Theorem 11.5.
Proposition 11.17. Consider the linear uncertain controlled system
˙x(t) = (A + ∆A)x(t) + Bu(t), x(0) = x
0
, t ≥ 0, (11.184)
where u(·) ∈ U is admissible and ∆A ∈ ∆
A
, where ∆
A
is given by (11.121).
Assume that there exist P ∈ P
n
and M
2
∈ N
n
such that
0 = A
T
α
P + P A
α
+ R
1
+
p
X
i=1
α
2
i
α
A
T
i
P A
i
− P SP, (11.185)
0 = (A
α
− SP )
T
M
2
+ M
2
(A
α
− SP ) +
p
X
i=1
α
2
i
α
A
T
i
M
2
A
i
+
ˆ
R
2
. (11.186)
Then, w ith the feedback control
u = φ(x) = −R
−1
2
B
T
P +
r
X
k=2
(x
T
M
2
x)
k−1
M
2
!
x,
the zero solution x(t) ≡ 0 to the un certain system (11.184) is globally
asymptotically stable for all x
0
∈ R
n
and ∆A ∈ ∆
A
, and the performance
functional (11.127) satisfies
sup
∆A∈∆
A
J
∆A
(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = x
T
0
P x
0
+
r
X
k=2
1
k
(x
T
0
M
2
x
0
)
k
,
(11.187)
where
J(x
0
, u(·))
△
=
Z
∞
0
[L(x, u) + Γ(x, u)]dt, (11.188)
and where u(·) is admissible, and x(t), t ≥ 0, solves (11.184) with ∆A = 0
and
Γ(x, u) = x
T
"
p
X
i=1
α
2
i
α
A
T
i
P A
i
+ αP
+
r
X
k=2
(x
T
M
2
x)
k−1
p
X
i=1
α
2
i
α
A
T
i
M
2
A
i
+ αM
2
!#
x.
In addition, the performance functional (11.127), w ith R
2
(x) = R
2
, L
2
(x) =
NonlinearBook10pt November 20, 2007
690 CHAPTER 11
0, and
L
1
(x) = x
T
R
1
+
r
X
k=2
(x
T
M
2
x)
k−1
ˆ
R
2
+
r
X
k=2
(x
T
M
2
x)
k−1
!
2
M
2
SM
2
x,
(11.189)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)), (11.190)
where S(x
0
) is the set of regulation controllers for the nominal system and
x
0
∈ R
n
.
Proof. It need only be noted that ∆A
T
P + P ∆A ≤
P
p
i=1
α
2
i
α
A
T
i
P A
i
+
αP for all ∆A ∈ ∆
A
and P ∈ P
n
. The result now is a d irect consequence
of Theorem 11.5 with Ω(P ) =
P
p
i=1
α
2
i
α
A
T
i
P A
i
+ αP .
Proposition 11.18. Consider the linear u ncertain controlled sys tem
˙x(t) = (A + ∆A)x(t) + Bu(t), x(0) = x
0
, t ≥ 0, (11.191)
where u(·) ∈ U is admissible and ∆A ∈ ∆
A
, wh ere ∆
A
is given by (11.122).
Assume that there exist P ∈ P
n
and M
2
∈ N
n
such that
0 = A
T
P + P A + R
1
+ C
T
0
NC
0
+ P B
0
B
T
0
P − P SP, (11.192)
0 = (A − SP )
T
M
2
+ M
2
(A −SP ) +
ˆ
R
2
+ C
T
0
NC
0
+ M
2
B
0
B
T
0
M
2
.
(11.193)
Then, with the f eedback control
u = φ(x) = −R
−1
2
B
T
P +
r
X
k=2
(x
T
M
2
x)
k−1
M
2
!
x,
the zero solution x(t) ≡ 0 to the un certain system (11.191) is globally
asymptotically stable for all x
0
∈ R
n
and ∆A ∈ ∆
A
, and the performance
functional (11.127) satisfies
sup
∆A∈∆
A
J
∆A
(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = x
T
0
P x
0
+
r
X
k=2
1
k
(x
T
0
M
2
x
0
)
k
,
(11.194)
where
J(x
0
, u(·))
△
=
Z
∞
0
[L(x, u) + Γ(x, u)]dt, (11.195)
and where u(·) is admissible, and x(t), t ≥ 0, solves (11.191) with ∆A = 0
and
Γ(x, u) = x
T
C
T
0
NC
0
+ P B
0
B
T
0
P
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 691
+
r
X
k=2
(x
T
M
2
x)
k−1
(C
T
0
NC
0
+ M
2
B
0
B
T
0
M
2
)
#
x.
In addition, the performance functional (11.127), w ith R
2
(x) = R
2
, L
2
(x) =
0, and
L
1
(x) = x
T
R
1
+
r
X
k=2
(x
T
M
2
x)
k−1
ˆ
R
2
+
r
X
k=2
(x
T
M
2
x)
k−1
!
2
M
2
SM
2
x,
(11.196)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)), (11.197)
where S(x
0
) is the set of regulation controllers for the nominal system and
x
0
∈ R
n
.
Proof. It need only be noted that ∆A
T
P +P ∆A ≤ C
T
0
NC
0
+P B
0
B
T
0
P
for all ∆A ∈ ∆
A
and P ∈ P
n
. The result now is a direct consequence of
Theorem 11.5 with Ω(P ) = C
T
0
NC
0
+ P B
0
B
T
0
P .
Propositions 11.17 and 11.18 are generalizations of results given in
[48,50] to nonlinear polynomial performance criteria.
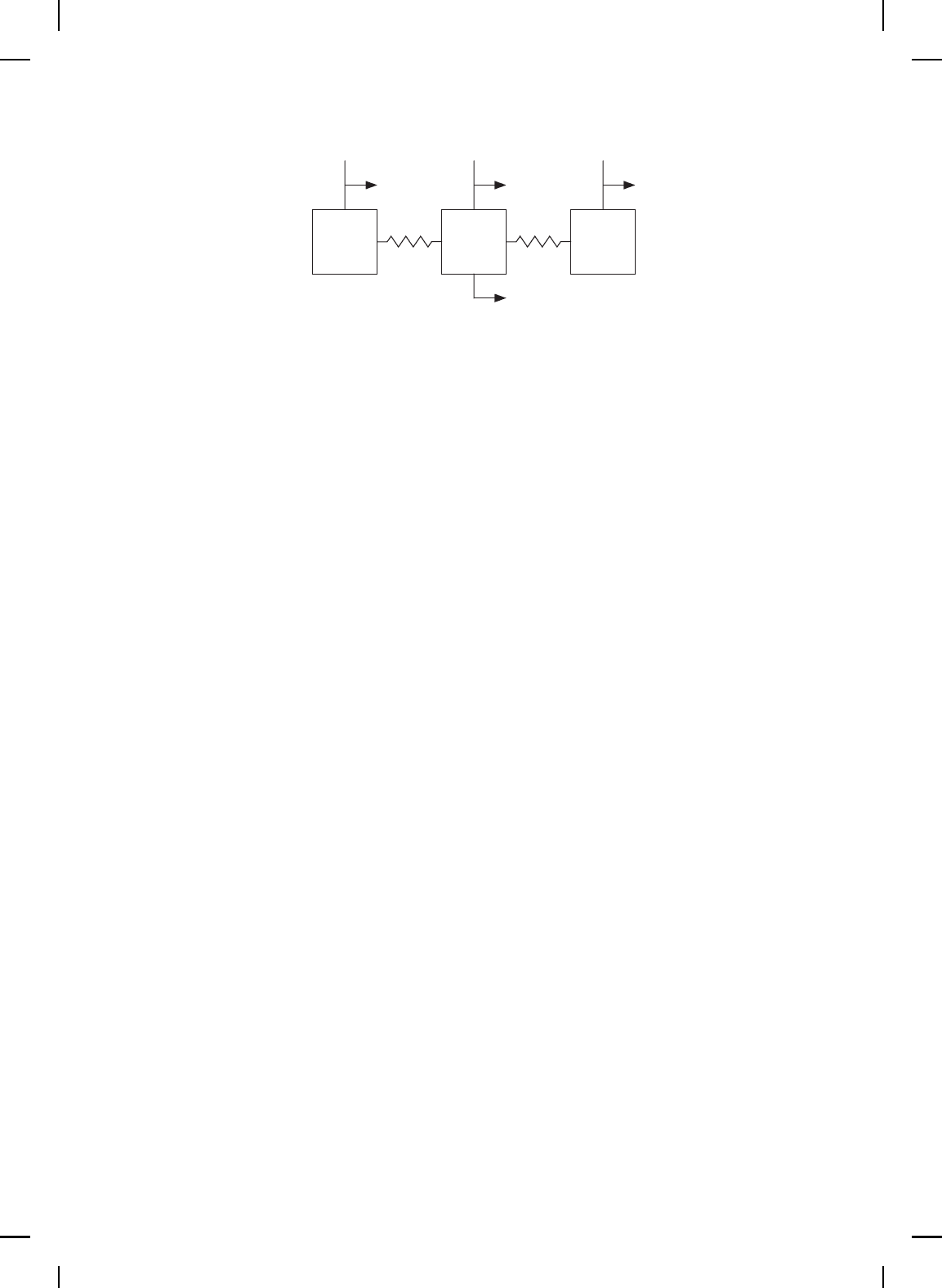
Example 11.7. Consider the three-mass, two-spring system shown in
Figure 11.3 with m
1
= m
2
= m
3
= 1 and uncertain spring stiffnesses k
1
and k
2
. A control f orce acts on mass 2. T he nominal dynamics, with state
variables defi ned in Figure 11.3, are given by
A =
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
−k
1nom
k
1nom
0 0 0 0
k
1nom
−(k
1nom
+ k
2nom
) k
2nom
0 0 0
0 k
2nom
−k
2nom
0 0 0
, B =
0
0
0
0
1
0
.
(11.198)
The actual spring stiffnesses can be written as k
i
= k
inom
+ ∆ k
i
, w here
k
inom
= 1, i = 1, 2, so that the actual dynamics of the system are given by
A
actual
= A +
P
2
i=1
∆k
i
A
i
, where
A
1
=
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
−1 1 0 0 0 0
1 −1 0 0 0 0
0 0 0 0 0 0
, A
2
=
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 −1 1 0 0 0
0 1 −1 0 0 0
.
NonlinearBook10pt November 20, 2007
692 CHAPTER 11
m
1
m
2
m
3
x
1
x
2
x
3
u
k
1
k
2
Figure 11.3 Three-mass oscillator.
Choosing the performance variables
z
△
= E
1
x + E
2
u,
where
E
1
=
0 0 1 0 0 0
0 0 0 0 0 1
, E
2
=
0
1
,
expresses the desire to regulate the displacement and velocity of mass 3.
Furth ermore, let the design parameters R
1
= E
T
1
E
1
and R
2
= ρE
T
2
E
2
,
where ρ = 0.001. For the nonlinear control design, the add itional design
parameter
ˆ
R
2
in (11.186) is taken as
ˆ
R
2
= 10 · R
1
. The design goal of this
problem is to achieve good nominal perform an ce and demonstrate robust
stability and performance for pertu rbed spring stiffness values in the range
0.75 ≤ k
i
≤ 1.25, i = 1, 2.
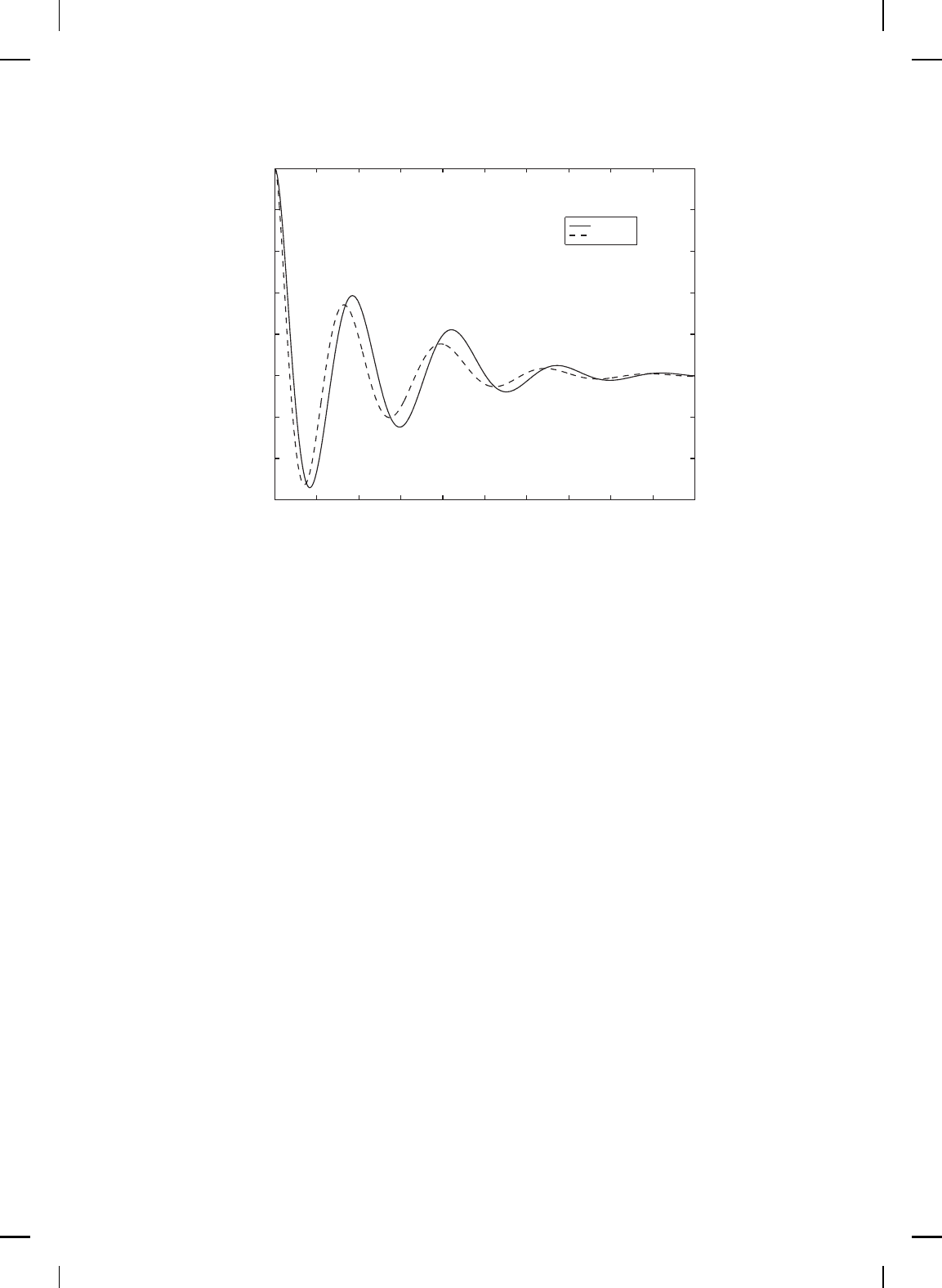
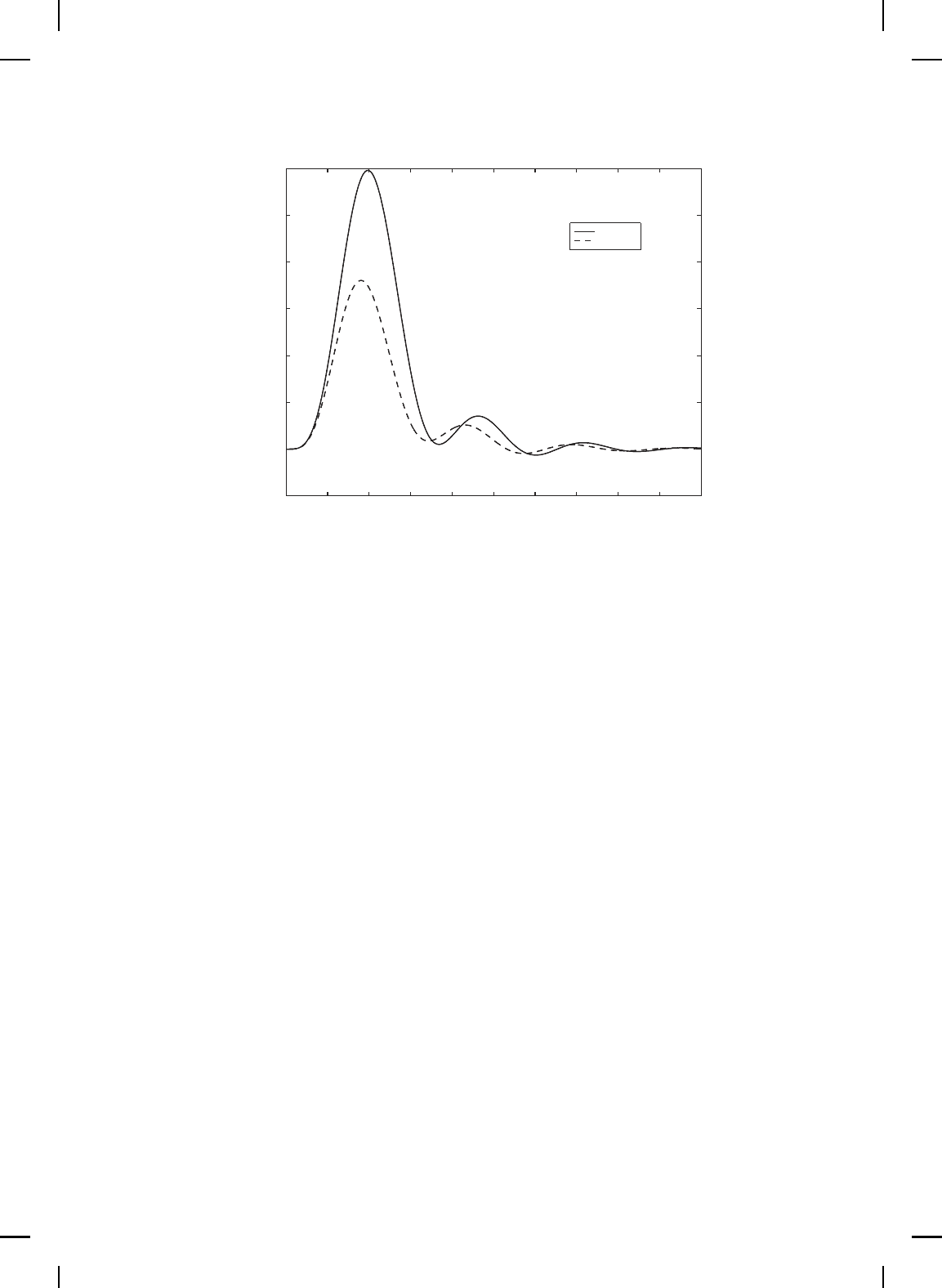
Figures 11.4 and 11.5 compares the linear LQR controller to the
nonlinear Speyer [411] controller (Proposition 11.17 with ∆A = 0 and
r = 2) for the nominal plant subject to an initial displacement of mass
1. Note that the nonlinear controller achieves better performance in th e
sense of state trajectory regulation for each of the states. This is primarily
due to the relatively large in itial displacement of mass 1 which allowed the
nonlinear part of the control to initially have a significant impact on the
response causing the position of mass 1 to approach zero faster than the
linear controller design. The action of the nonlinear part of the controller
also reduced the overshoot since the nonlinear control contribution becomes
greater as the position deviates farther from the equilibrium thus causing
the mass to recover qu icker.
Next, using Proposition 11.17 (with r = 2) a robustified nonlinear con-
troller was designed for the uncertain system with multivariable uncertainty
in the stiffness values. This controller is compared to the robustified linear
LQR controller given by (11.120), th e Speyer [411] nonlinear controller, and
the LQR controller. Figures 11.6 and 11.7 shows the state responses for these
designs for ∆k
1
= −0.25 and ∆k
2
= 0.25. Note th at the robust nonlinear
controller outperf orms all other controllers in the sense of worst-case state
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 693
LQR
Speyer
0 1 2 3 4 5 6 7 8 9 10
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
time (sec)
position of mass 1
Figure 11.4 Comparison of LQR and Speyer controllers for the nominal system: Position
of mass 1.
trajectory regulation. △
Example 11.8. Consider the pitch axis longitudinal dyn amics m odel
of th e F-16 fighter aircraft system given in [394] for nomin al flight conditions
at 3000 ft and Mach number of 0.6. The nominal model is given by
˙x
1
(t)
˙x
2
(t)
˙x
3
(t)
=
0 1.00 0
0 −0.87 43.22
0 0.99 − 1.34
x
1
(t)
x
2
(t)
x
3
(t)
+
0 0
−17.25 −1.58
−0.17 − 0.25
u
1
(t)
u
2
(t)
, (11.199)
where x
1
is the pitch angle, x
2
is the pitch rate, x
3
is the angle of attack, u
1
is the elevator deflection, and u
2
is the flaperon deflection. Here, we consider
uncertainty in the (2,2) and (3,3) entries of the dynamics matrix. Using the
uncertainty structure given by (11.122), the actual dynamics are given by
A
actual
= A + B
0
F C
0
, where
B
0
=
0 0
1 0
0 1
, F =
f
1
0
0 f
2
, C
0
=
0 1 0
0 0 1
.
Using Proposition 11.18, with R
1
= 3·I
3
, R
2
= 0.001·I
2
,
ˆ
R
2
= 10·R
1
,
NonlinearBook10pt November 20, 2007
694 CHAPTER 11
LQR
Speyer
0 1 2 3 4 5 6 7 8 9 10
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
time (sec)
position of mass 3
Figure 11.5 Comparison of LQR and Speyer controllers for the nominal system: Position
of mass 3.
|f
1
| ≤ 1, |f
2
| ≤ 5, and r = 2, a robustified nonlinear controller was designed
for the un certain system. This controller is compared with the robustified
linear controller given by (11.123), the Speyer [411] n onlinear controller, and
the LQR controller. Figures 11.8 and 11.9 shows that for the case where f
1
=
−1 and f
2
= 5 the LQR controller destabilizes th e system while the nominal
Speyer [411] controller maintains Lyapunov stability. This demonstrates
the inherent robustness of the nominal (nonrobustified) nonlinear control
in comparison to the nomin al linear control. Furthermore, for the same
uncertainty range Figures 11.10 and 11.11 shows the state response for the
robustified nonlinear controller (Proposition 11.18) and the robustified linear
controller obtained via (11.123). △
11.9 Rob u st Nonlinear Controllers with Multilinear
Performance Criteria
In this section, we specialize the results of Section 11.5 to linear uncertain
systems controlled by nonlinear controllers that minimize a multilinear cost
functional. Specifically, we assum e F to be the set of uncertain linear
systems given by (11.176). For the following result recall the definition
of S and let R
1
∈ P
n
, R
2
∈ P
m
, and
ˆ
R
2ν
∈ N
(2ν,n)
, ν = 2, . . . , r, be given
where r is a given integer.