Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 675
Alternatively, we can choose
Ω
xx
(P ) =
p
X
i=1
α
2
i
α
(A
i
− B
i
R
−1
2
B
T
P )
T
P (A
i
− B
i
R
−1
2
B
T
P ) + αP,
Ω
xu
(P ) = 0,
Ω
uu
(P ) = 0.
In this case, note that
0 ≤
p
X
i=1
α
i
α
1
2
P
1
2
(A
i
− B
i
R
−1
2
B
T
P ) −
δ
i
α
1
2
α
i
P
1
2
T
·
α
i
α
1
2
P
1
2
(A
i
−B
i
R
−1
2
B
T
P ) −
δ
i
α
1
2
α
i
P
1
2
,
or, equivalently,
p
X
i=1
δ
i
[(A
i
− B
i
R
−1
2
B
T
P )
T
P + P (A
i
− B
i
R
−1
2
B
T
P )]
≤
p
X
i=1
α
2
i
α
(A
i
−B
i
R
−1
2
B
T
P )
T
P (A
i
− B
i
R
−1
2
B
T
P ) +
δ
2
i
α
α
2
i
P,
which, since
P
p
i=1
δ
2
i
α
2
i
≤ 1, implies
p
X
i=1
δ
i
[(A
i
− B
i
R
−1
2
B
T
P )
T
P + P (A
i
− B
i
R
−1
2
B
T
P )]
≤
p
X
i=1
α
2
i
α
(A
i
− B
i
R
−1
2
B
T
P )
T
P (A
i
− B
i
R
−1
2
B
T
P ) + αP,
and h en ce, (11.111) holds. Fu rthermore, (11.112) specializes to
0 = A
T
α
P + P A
α
+ R
1
+
p
X
i=1
α
2
i
α
(A
i
− B
i
R
−1
2
B
T
P )
T
P (A
i
−B
i
R
−1
2
B
T
P ),
(11.121)
and the optimal robust feedback law is given by φ(x) = −R
−1
2
B
T
P x.
The robustified Riccati equation (11.121) does not appear to have been
considered in the literature for the uncertainty structure given by (11.119).
Next, we consider the uncertainty set ∆
A
× ∆
B
given by
∆
A
× ∆
B
△
= {(∆A, ∆B) : ∆A = B
0
F C
0
, ∆B = B
0
F D
0
, F
T
F ≤ N},
(11.122)
where B
0
∈ R
n×r
, C
0
∈ R
s×n
, and D
0
∈ R
r×m
are fixed matrices denoting
the structure of the uncertainty, F ∈ R
r×s
is an uncertain matrix, and

NonlinearBook10pt November 20, 2007
676 CHAPTER 11
N ∈ N
s
is a given uncertainty bound [48]. I n this case, let
Ω
xx
(P ) = C
T
0
NC
0
+ P B
0
B
T
0
P,
Ω
xu
(P ) = C
T
0
ND
0
,
Ω
uu
(P ) = D
T
0
ND
0
.
Next, for notational convenience define R
2a
△
= R
2
+ D
T
0
ND
0
and P
a
△
=
B
T
P + D
T
0
NC
0
. Now, note that
0 ≤
F C
0
− F D
0
R
−1
2a
P
a
− B
T
0
P
T
F C
0
− F D
0
R
−1
2a
P
a
− B
T
0
P
,
or, equivalently,
[F C
0
− F D
0
R
−1
2a
P
a
]
T
B
T
0
P + P B
0
[F C
0
− F D
0
R
−1
2a
P
a
]
≤ [C
0
− D
0
R
−1
2a
P
a
]
T
F
T
F [C
0
− D
0
R
−1
2a
P
a
] + P B
0
B
T
0
P,
which, since F
T
F ≤ N, implies
[F C
0
−F D
0
R
−1
2a
P
a
]
T
B
T
0
P + P B
0
[F C
0
− F D
0
R
−1
2a
P
a
]
≤ [C
0
− D
0
R
−1
2a
P
a
]
T
N[C
0
− D
0
R
−1
2a
P
a
] + P B
0
B
T
0
P,
and h en ce, (11.111) holds. Fu rthermore, (11.112) specializes to
0 = A
T
P + P A + R
1
+ C
T
0
NC
0
+ P B
0
B
T
0
P −P
T
a
R
−1
2a
P
a
, (11.123)
and the optimal robust feedback law is given by φ(x) = − R
−1
2a
P
a
x. This
corresponds to the results obtained in [41, 354, 356,480].
Alternatively, we can choose
Ω
xx
(P ) = [C
0
− D
0
R
−1
2
B
T
P ]
T
N[C
0
− D
0
R
−1
2
B
T
P ] + P B
0
B
T
0
P,
Ω
xu
(P ) = 0,
Ω
uu
(P ) = 0.
In this case, n ote that
0 ≤
F C
0
− F D
0
R
−1
2
B
T
P − B
T
0
P
T
F C
0
− F D
0
R
−1
2
B
T
P − B
T
0
P
,
or, equivalently,
[F C
0
− F D
0
R
−1
2
B
T
P ]B
T
0
P + P B
0
[F C
0
− F D
0
R
−1
2
B
T
P ]
≤ [C
0
− D
0
R
−1
2
B
T
P ]
T
F
T
F [C
0
− D
0
R
−1
2
B
T
P ] + P B
0
B
T
0
P,
which, since F
T
F ≤ N, implies
[F C
0
− F D
0
R
−1
2
B
T
P ]B
T
0
P + P B
0
[F C
0
−F D
0
R
−1
2
B
T
P ]
≤ [C
0
− D
0
R
−1
2
B
T
P ]
T
N[C
0
−D
0
R
−1
2
B
T
P ] + P B
0
B
T
0
P,

NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 677
and h en ce, (11.111) holds. Fu rthermore, (11.112) becomes
0 = A
T
P + P A + R
1
− P SP + [C
0
− D
0
R
−1
2
B
T
P ]
T
N[C
0
− D
0
R
−1
2
B
T
P ]
+P B
0
B
T
0
P, (11.124)
where S
△
= BR
−1
2
B
T
, and the optimal robust feedback law is given by
φ(x) = −R
−1
2
B
T
P x.
The robustified Riccati equation (11.124) does not appear to have been
considered in the literature for the uncertainty structure given by (11.122).
11.5 Optimal and Inverse Optimal Robust Control for No n linear
Uncertain Affine Systems
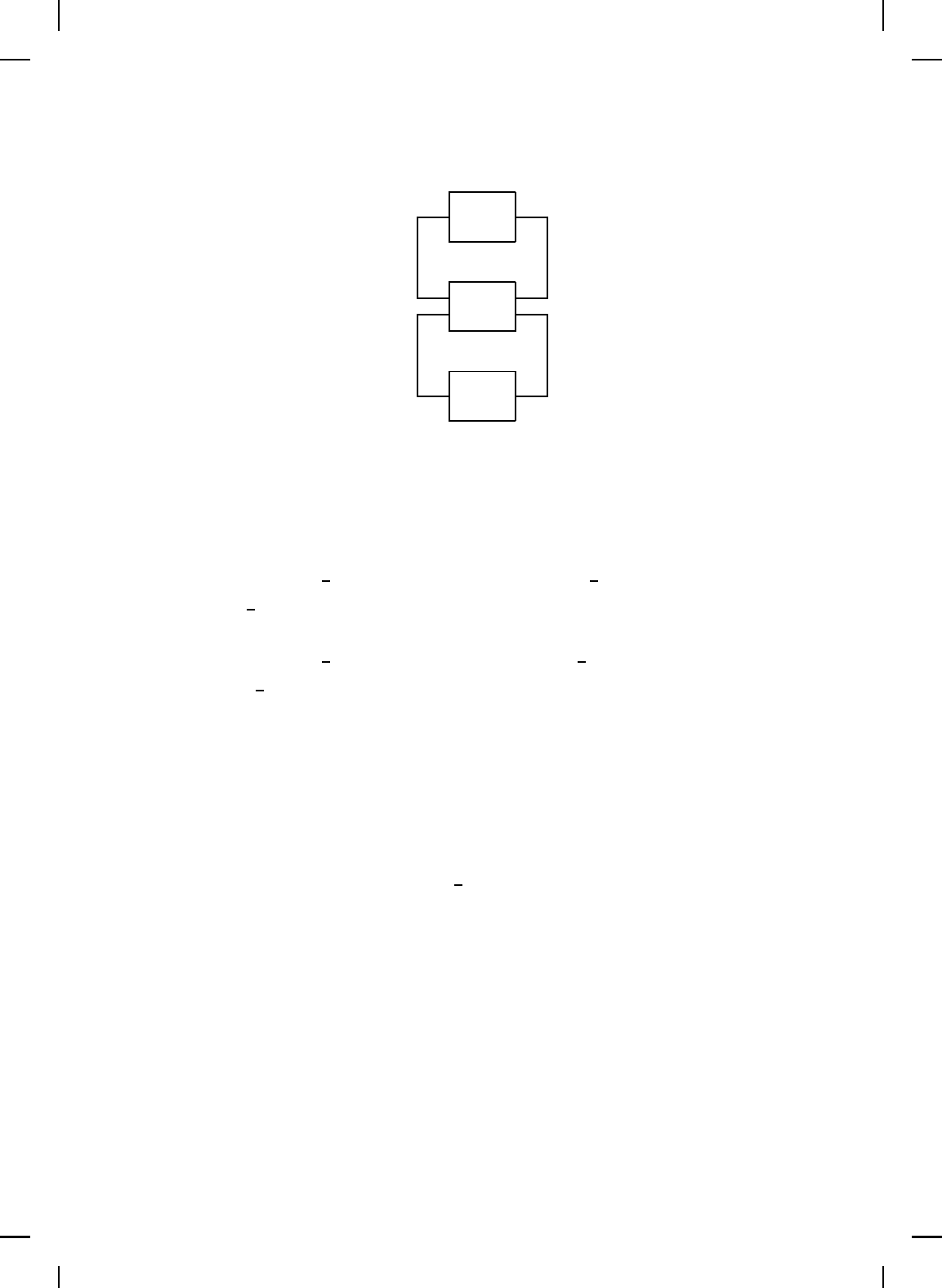
In this section, we specialize Theorem 11.2 to affine (in the control) uncertain
systems having the form (see Figure 11.2)
˙x(t) = f
0
(x(t))+∆f(x(t))+[G
0
(x(t)) + ∆G(x(t))] u(t), x(0) = x
0
, t ≥ 0,
(11.125)
where f
0
: R
n
→ R
n
satisfies f
0
(0) = 0, G
0
: R
n
→ R
n×m
, D = R
n
, U = R
m
,
F = {f
0
(x) + ∆f(x) + [G
0
(x) + ∆G(x)]u : x ∈ R
n
, u ∈ R
m
, (∆f, ∆G) ∈
∆
f
× ∆
G
}, ∆f(·) ∈ ∆
f
⊂ {∆f : R
n
→ R
n
: ∆ f (0) = 0},
and
∆G ∈ ∆
G
⊂ {∆G : R
n
→ R
n×m
}.
In this s ection, no explicit structure is assumed for the elements of ∆
f
and
∆
G
. In Section 11.6 the str ucture of variations in ∆
f
and ∆
G
will be
specified. Furthermore, we consider performance integrands L(x, u) of the
form
L(x, u) = L
1
(x) + L
2
(x)u + u
T
R
2
(x)u, (11.126)
where L
1
: R
n
→ R, L
2
: R
n
→ R
1×m
, and R
2
: R
n
→ P
m
so that (11.95)
becomes
J(x
0
, u(·)) =
Z
∞
0
[L
1
(x(t)) + L
2
(x(t))u(t) + u
T
(t)R
2
(x)u(t)]dt. (11.127)
Corollary 11.4. Consider the nonlinear uncertain controlled affine
system (11.125) with performance functional (11.127). Assume that there
exist a continuously differentiable function V : R
n
→ R an d functions
L
2
: R
n
→ R
1×m
, Γ
xx
: R
n
→ R, Γ
xu
: R
n
→ R
1×m
, and Γ
uu
: R
n
→ N
m
such that
V (0) = 0, (11.128)
L
2
(0) = 0, (11.129)
NonlinearBook10pt November 20, 2007
678 CHAPTER 11
φ(x)
G
∆G
-
-
Figure 11.2 Uncertain nonlinear feedback system.
Γ
xu
(0) = 0, (11.130)
V (x) > 0, x ∈ R
n
, x 6= 0, (11.131)
V
′
(x)
∆f(x) −
1
2
∆G(x)R
−1
2a
(x)V
a
(x)
≤ Γ
xx
(x) −
1
2
Γ
xu
(x)R
−1
2a
(x)V
a
(x)
+
1
4
V
T
a
(x)R
−1
2a
(x)Γ
uu
(x)R
−1
2a
(x)V
a
(x), (∆f, ∆ G) ∈ ∆
f
× ∆
G
,
(11.132)
V
′
(x)[f
0
(x) −
1
2
G
0
(x)R
−1
2a
(x)V
a
(x)] + Γ
xx
(x) −
1
2
Γ
xu
(x)R
−1
2a
(x)V
a
(x)
+
1
4
V
T
a
(x)R
−1
2a
(x)Γ
uu
(x)R
−1
2a
(x)V
a
(x) < 0, x ∈ R
n
, x 6= 0,
(11.133)
and
V (x) → ∞ as kxk → ∞, (11.134)
where R
2a
(x)
△
= R
2
(x)+Γ
uu
(x) and V
a
(x)
△
= [L
2
(x)+Γ
xu
(x)+V
′
(x)G
0
(x)]
T
.
Then the zero solution x(t) ≡ 0 of the nonlinear uncertain s ystem (11.125)
is globally asymptotically stable for all (∆f, ∆G) ∈ ∆
f
× ∆
G
with the
feedback control law
φ(x) = −
1
2
R
−1
2a
(x)V
a
(x), (11.135)
and the performan ce functional (11.127) satisfies
sup
(∆f,∆G)∈∆
f
×∆
G
J(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = V (x
0
), (11.136)
where
J(x
0
, u(·))
△
=
Z
∞
0
[L(x(t), u(t)) + Γ(x(t), u(t))]dt, (11.137)
and
Γ(x, u) = Γ
xx
(x) + Γ
xu
(x)u + u
T
Γ
uu
(x)u, (11.138)
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 679
where u(·) is admissible, and x(t), t ≥ 0, solves (11.125) with (∆f, ∆G) =
(0, 0). In addition, the perform ance fu nctional (11.137), with
L
1
(x) = φ
T
(x)R
2a
(x)φ(x) −V
′
(x)f
0
(x) − Γ
xx
(x), (11.139)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)). (11.140)
Proof. The result is a direct consequence of Theorem 11.2 with
D = R
n
, U = R
m
, F
0
(x, u) = f
0
(x) + G
0
(x)u, F (x, u) = f
0
(x) + ∆f(x) +
[G
0
(x) + ∆G(x)]u, F = {f
0
(x) + ∆f(x) + [G
0
(x) + ∆G(x)]u : x ∈ R
n
, u ∈
R
m
, (∆f, ∆G) ∈ ∆
f
×∆
G
}, L(x, u) given by (11.126), and Γ(x, u) given by
(11.138). Specifically, with (11.125), (11.126), and (11.138), the Hamiltonian
has the form
H(x, u) = L
1
(x) + L
2
(x)u + u
T
R
2
(x)u + V
′
(x)(f
0
(x) + G
0
(x)u)
+Γ
xx
(x) + Γ
xu
(x)u + u
T
Γ
uu
(x)u.
Now, the feedback control law (11.135) is obtained by setting
∂H
∂u
= 0. With
(11.135), it follows that (11.132) and (11.133) imply (11.99), and (11.100),
respectively. Next, since V (·) is continuously differentiable and x = 0 is
a local minimum of V (·), it follows that V
′
(0) = 0, and hence, since by
assumption L
2
(0) = 0 and Γ
xu
(0) = 0, it follows that φ(0) = 0, which proves
(11.98). Next, with L
1
(x) given by (11.139) and φ(x) given by (11.135) it
follows that (11.101) holds. Finally, since H(x, u) = H(x, u) −H(x, φ(x)) =
[u − φ(x)]
T
R
2a
(x)[u − φ(x)] and R
2a
(x) is positive definite for all x ∈ R
n
,
condition (11.102) holds. The result now f ollows as a direct consequence of
Theorem 11.2.
Note that (11.133) implies
˙
V (x)
△
= V
′
(x)[f
0
(x) + ∆f(x) + (G
0
(x) + ∆G(x))φ(x)] < 0,
x ∈ R
n
, x 6= 0, (∆f, ∆G) ∈ ∆
f
× ∆
G
, (11.141)
with φ(x) given by (11.135). Furthermore, (11.128), (11.131), and (11.141)
ensure that V (x) is a Lyapunov function guaranteeing robust stability of
the closed-loop system for all (∆f, ∆G) ∈ ∆
f
× ∆
G
. As n oted in Chapter
9, it is important to recognize that the function L
2
(x) which appears in th e
integrand of the performance functional (11.127) is an arbitrary function
of x subject to conditions (11.129), (11.132), and (11.133). Thus, L
2
(x)
provides flexibility in choosing the control law.
With L
1
(x) given by (11.139) and φ(x) given by (11.135), L(x, u) +
Γ(x, u) can be expressed as
L(x, u) + Γ(x, u) = [u −φ(x)]
T
R
2a
(x)[u − φ(x)] −V
′
(x)[f
0
(x) + G
0
(x)u]
NonlinearBook10pt November 20, 2007
680 CHAPTER 11
=
u +
1
2
R
−1
2a
(x)(L
2
(x) + Γ
xu
(x))
T
T
R
2a
(x)
·
u +
1
2
R
−1
2a
(x)(L
2
(x) + Γ
xu
(x))
T
−V
′
(x)[f
0
(x) + G
0
(x)φ(x)]
−
1
4
V
′
(x)G
0
(x)R
−1
2a
(x)G
T
0
(x)V
′T
(x). (11.142)
Since R
2a
(x) ≥ R
2
(x) > 0 for all x ∈ R
n
the first term of the right-hand
side of (11.142) is nonnegative, while (11.141) implies that the second term
is nonnegative. Thus, we have
L(x, u) + Γ(x, u) ≥ −
1
4
V
′
(x)G
0
(x)R
−1
2a
(x)G
T
0
(x)V
′T
(x), (11.143)
which shows that L(x, u) + Γ(x, u) may be negative. As a result, there
may exist a control in put u for which the auxiliary performance functional
J(x
0
, u) is negative. Note, however, if the control is a stabilizing feedback
control, that is, u ∈ S(x
0
), then it follows from (11.136) and (11.140) that
J(x
0
, u(·)) ≥ V (x
0
) ≥ 0, x
0
∈ R
n
, u(·) ∈ S(x
0
).
Furth ermore, in this case, substituting u = φ(x) into (11.142) yields
L(x, φ(x)) + Γ(x, φ(x)) = −V
′
(x)[f
0
(x) + G
0
(x)φ(x)],
which, by (11.141), is positive.
11.6 Nonlinear Guaranteed Cost Control
Having established the theoretical basis for our approach, we now assign
explicit structure to the s et ∆
f
× ∆
G
and the bounding functions Γ
xx
(x),
Γ
xu
(x), and Γ
uu
(x), x ∈ R
n
. Even th ou gh both ∆f (x) and ∆G(x), x ∈ R
n
,
uncertainties can be considered, for simplicity of exposition we assume that
∆G(x) = 0, x ∈ R
n
(see Problem 11.26 for the case w here ∆G(x) 6= 0,
x ∈ R
n
). The uncertainty set F is assumed to be of the form given by
(11.23) with ∆ given by (11.24).
Proposition 11.15. Consider the nonlinear uncertain controlled sys-
tem (11.125) with performance functional (11.127). Assume that there
exist a continuously differentiable function V : R
n
→ R and function
L
2
: R
n
→ R
1×m
such that (11.128)–(11.131) are satisfied,
V
′
(x)[f
0
(x) −
1
2
G
0
(x)R
−1
2
(x)V
a
(x)] +
1
4
V
′
(x)G
δ
(x)G
T
δ
(x)V
′T
(x)
+m
T
(h
δ
(x))m(h
δ
(x)) < 0, x ∈ R
n
, x 6= 0, (11.144)
and
V (x) → ∞ as kxk → ∞, (11.145)
where V
a
(x)
△
= [L
2
(x) + V
′
(x)G
0
(x)]
T
. Then th e zero solution x(t) ≡ 0 of
the nonlinear uncertain system (11.125) is globally asymptotically stable for
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 681
all δ(·) ∈ ∆, w here ∆ is given by (11.24), with the feedback control law
φ(x) = −
1
2
R
−1
2
(x)V
a
(x). (11.146)
Furth ermore, the performance functional (11.127) satisfies
sup
δ(·)∈∆
J(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = V (x
0
), (11.147)
where
J(x
0
, u(·))
△
=
Z
∞
0
[L
1
(x) + L
2
(x)u + u
T
R
2
(x)u +
1
4
V
′
(x)G
δ
(x)G
T
δ
(x)V
′T
(x)
+m
T
(h
δ
(x))m(h
δ
(x))]dt, (11.148)
where u(·) is admissible and x(t), t ≥ 0, s olves (11.125) with δ(h
δ
(x)) ≡ 0.
In addition, the performance functional (11.148), with
L
1
(x) = φ
T
(x)R
2
(x)φ(x) − V
′
(x)f
0
(x) −
1
4
V
′
(x)G
δ
(x)G
T
δ
(x)V
′T
(x)
−m
T
(h
δ
(x))m(h
δ
(x)), (11.149)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)). (11.150)
Proof. The result is direct consequence of Corollary 11.4 with ∆
f
=
∆, ∆ given by (11.24), ∆G = 0, Γ
xx
(x) =
1
4
V
′
(x)G
δ
(x)G
T
δ
(x)V
′T
(x) +
m
T
(h
δ
(x))m(h
δ
(x)), Γ
xu
(x) = 0, and Γ
uu
(x) = 0. Specifically, (11.128)–
(11.131) are satisfied by assum ption and (11.144) implies (11.133). Next, if
δ(·) ∈ ∆ it f ollows that
V
′
(x)∆f(x) −Γ
xx
(x) = V
′
(x)G
δ
(x)δ(h
δ
(x)) −
1
4
V
′
(x)G
δ
(x)G
T
δ
(x)V
′T
(x)
−m
T
(h
δ
(x))m(h
δ
(x))
≤ −[
1
2
G
T
δ
(x)V
′T
(x) − δ(h
δ
(x))]
T
·[
1
2
G
T
δ
(x)V
′T
(x) − δ(h
δ
(x))]
≤ 0,
which implies (11.132). The result now follows as a direct consequence of
Corollary 11.4.
We now assign a different structure to the uncertainty set ∆ and the
bounding functions Γ
xx
(x), Γ
xu
(x), and Γ
uu
(x). Specifically, the uncertainty
set ∆ is assumed to be of the form given by (11.27).
Proposition 11.16. Consider the nonlinear uncertain controlled sys-
tem (11.125) with perform ance functional (11.127). Assume that there
exist a continuously differentiable function V : R
n
→ R and function
NonlinearBook10pt November 20, 2007
682 CHAPTER 11
L
2
: R
n
→ R
1×m
such that (11.128)–(11.131) are satisfied,
V
′
(x)[f
0
(x) −
1
2
G
0
(x)R
−1
2
(x)V
a
(x)] +
1
4
[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)]
T
·[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)] + V
′
(x)G
δ
(x)m
1
(h
δ
(x)) < 0, x ∈ R
n
, x 6= 0,
(11.151)
and
V (x) → ∞ as kxk → ∞, (11.152)
where V
a
(x)
△
= [L
2
(x) + V
′
(x)G
0
(x)]
T
. Then th e zero solution x(t) ≡ 0 of
the nonlinear uncertain system (11.125) is globally asymptotically stable for
all δ(·) ∈ ∆, w here ∆ is given by (11.27), with the feedback control law
φ(x) = −
1
2
R
−1
2
(x)V
a
(x). (11.153)
Furth ermore, the performance functional (11.127) satisfies
sup
δ(·)∈∆
J(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = V (x
0
), (11.154)
where
J(x
0
, u(·))
△
=
Z
∞
0
L
1
(x) + L
2
(x)u + u
T
R
2
(x)u
+
1
4
[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)]
T
[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)]
+V
′
(x)G
δ
(x)m
1
(h
δ
(x))
dt, (11.155)
where u(·) is admissible, and x(t), t ≥ 0, solves (11.125) with δ(h
δ
(x)) ≡ 0.
In addition, the performance functional (11.155), with
L
1
(x) = φ
T
(x)R
2
(x)φ(x) −V
′
(x)f
0
(x) − V
′
(x)G
δ
(x)m
1
(h
δ
(x))
−
1
4
[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)]
T
[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)],
(11.156)
is minimized in the sense that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)). (11.157)
Proof. The result is direct consequence of Corollary 11.4 w ith
∆
f
= ∆, ∆ given by (11.27), ∆G = 0, Γ
xx
(x) =
1
4
[m(h
δ
(x)) +
G
T
δ
(x)V
′T
(x)]
T
[m(h
δ
(x))+ G
T
δ
(x)V
′T
(x)]+ V
′
(x)G
δ
(x)m
1
(h
δ
(x)), Γ
xu
(x) =
0, and Γ
uu
(x) = 0. Specifically, (11.128)–(11.131) are satisfied by
assumption and (11.151) implies (11.133). Next, if δ(·) ∈ ∆ it follows that
V
′
(x)∆f(x) − Γ
xx
(x)
≤ −[δ(h
δ
(x)) −m
1
(h
δ
(x))]
T
[δ(h
δ
(x)) −m
2
(h
δ
(x))]
+V
′
(x)G
δ
(x)δ(h
δ
(x))
NonlinearBook10pt November 20, 2007
ROBUST NONLINEAR CONTROL 683
−
1
4
[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)]
T
[m(h
δ
(x)) + G
T
δ
(x)V
′T
(x)]
−V
′
(x)G
δ
(x)m
1
(h
δ
(x))
= −[
1
2
m(h
δ
(x)) +
1
2
G
T
δ
(x)V
′T
(x) − (δ(h
δ
(x) − m
1
(h
δ
(x)))]
T
·[
1
2
m(h
δ
(x)) +
1
2
G
T
δ
(x)V
′T
(x) − (δ(h
δ
(x) − m
1
(h
δ
(x)))]
≤ 0,
which implies (11.132). The result now follows as a direct consequence of
Corollary 11.4.
11.7 Stability Margins, Meaningful Inverse Optimality, and
Robust Control Lyapunov Functions
In this section, we specialize the results of Section 11.5 to the case where
L(x, u) is nonnegative for all (x, u) ∈ R
n
× R
m
. Here, we assu me that
L
2
(x) ≡ 0 and L
1
(x) ≥ 0, x ∈ R
n
. We begin by specializing Corollary
11.4 to the case where L
2
(x) ≡ 0. In th is case, the performance functional
(11.127) becomes
J(x
0
, u(·)) =
Z
∞
0
[L
1
(x(t)) + u
T
(t)R
2
(x(t))u(t)]dt. (11.158)
For simplicity of exposition we assume ∆G(x) ≡ 0, Γ
xu
(x) ≡ 0, and
Γ
uu
(x) ≡ 0.
Corollary 11.5. Consid er the nonlinear controlled dynamical system
(11.125) with performance functional (11.158). Assume that there exist a
continuously differentiable function V : R
n
→ R and a function Γ
xx
: R
n
→
R su ch that
V (0) = 0, (11.159)
V (x) > 0, x ∈ R
n
, x 6= 0, (11.160)
V
′
(x)∆f(x) ≤ Γ
xx
(x), ∆f(·) ∈ ∆, (11.161)
0 = V
′
(x)f
0
(x) + L
1
(x) −
1
4
V
′
(x)G(x)R
−1
2
(x)G
T
(x)V
′T
(x) + Γ
xx
(x),
x ∈ R
n
, (11.162)
and
V (x) → ∞ as kxk → ∞. (11.163)
Furth ermore, assume that the system (11.125), with output y = L
1
(x), is
zero-state observable. Then the zero solution x(t) ≡ 0 of the u ncertain
closed-loop system
˙x(t) = f
0
(x(t)) + ∆f(x) + G(x(t))φ(x(t)), x(0) = x
0
, t ≥ 0,
(11.164)
NonlinearBook10pt November 20, 2007
684 CHAPTER 11
is globally asymptotically stable for all ∆f(·) ∈ ∆ with feedback control law
φ(x) = −
1
2
R
−1
2
(x)G
T
(x)V
′T
(x). (11.165)
Furth ermore, the performance functional (11.158) satisfies
J(x
0
, φ(x(·))) ≤ J(x
0
, φ(x(·))) = V (x
0
), (11.166)
where
J(x
0
, u(·))
△
=
Z
∞
0
[L(x(t), u(t)) + Γ
xx
(x(t))]dt. (11.167)
In addition, the performance functional (11.167) is minimized in the sense
that
J(x
0
, φ(x(·))) = min
u(·)∈S(x
0
)
J(x
0
, u(·)). (11.168)
Proof. The resu lt follows as a direct consequence of Corollary 11.4.
Next, we provide sector and gain margins for the nonlinear dynamical
system G given by (11.125). To consider relative stability margins for
nonlinear robust regulators consider the nonlinear dynamical system given
by (11.125) along with the output
y(t) = −φ(x(t)), (11.169)
where φ(·) is such that G is robus tly stable for all ∆f(·) ∈ ∆ with u = φ(x).
Furth ermore, assume that (11.125) and (11.169) is zero-state observable.
Theorem 11.3. Consider th e nonlinear dynamical system G given by
(11.125) and (11.169), where φ(x) is a feedback control law given by (11.165)
and where V (x), x ∈ R
n
, satisfies (11.159)–(11.162). Furthermore, assume
R
2
(x) = d iag[r
1
(x), . . . , r
m
(x)], where r
i
: R
n
→ R, r
i
(x) > 0, i = 1, . . . , m.
Then the nonlinear system G has a sector (and, hence, gain) margin (
1
2
, ∞).
Proof. Let ∆(u
c
) = σ(u
c
), where σ : R
m
→ R
m
is a static nonlinearity
such that σ(0) = 0, σ(u
c
) = [σ
1
(u
c1
), . . . , σ
m
(u
cm
)]
T
, and
1
2
u
2
ci
< σ
i
(u
ci
)u
ci
,
for all u
ci
6= 0, i = 1, . . . , m. In this case, the closed-loop system (11.125)
and (11.169) with u = −σ(y) is given by
˙x(t) = f
0
(x(t)) + ∆f(x(t)) + G(x(t))σ(φ(x(t))),
x(0) = x
0
, ∆f(·) ∈ ∆, t ≥ 0. (11.170)
Next, consider the Lyapunov function candidate V (x), x ∈ R
n
, satisfying
(11.162) and let
˙
V (x) denote the Lyapunov derivative along with the
trajectories of the closed-loop system (11.170). Now, it follows from (11.161)
and (11.162) that f or all ∆f(·) ∈ ∆,
˙
V (x) = V
′
(x)f
0
(x) + V
′
(x)∆f(x) + V
′
(x)G(x)σ(φ(x))
≤ φ
T
(x)R
−1
2
(x)φ(x) + V
′
(x)G(x)σ(φ(x)) + V
′
(x)∆f(x)