Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 225
then the nonlinear dynamical system given by (4.6) and (4.7) is
asymptotically stable with respect to x
1
uniformly in x
20
.
v) If D = R
n
1
and there exist continuously differentiable functions V :
R
n
1
× R
n
2
→ R and W : R
n
1
× R
n
2
→ R, class K functions β(·), γ(·),
and a class K
∞
function α(·) such that
˙
W (x
1
(·), x
2
(·)) is bounded from
below or above, and (4.49), (4.52), and (4.53) hold, then the nonlinear
dynamical system given by (4.6) and (4.7) is globally asymptotically
stable with respect to x
1
.
vi) If D = R
n
1
and there exist a continuously differentiable function
V : R
n
1
× R
n
2
→ R, a class K function γ(·), and class K
∞
functions
α(·), β(·) satisfying (4.49), (4.51), and (4.54), then the nonlinear
dynamical system given by (4.6) and (4.7) is globally asymptotically
stable with respect to x
1
uniformly in x
20
.
vii) If there exist a continuously differentiable function V : D × R
n
2
→ R
and positive constants α, β, γ, p ≥ 1 satisfying
αkx
1
k
p
≤ V (x
1
, x
2
) ≤ βkxk
p
, (x
1
, x
2
) ∈ D × R
n
2
, (4.55)
˙
V (x
1
, x
2
) ≤ −γkxk
p
, (x
1
, x
2
) ∈ D × R
n
2
, (4.56)
then the nonlinear dynamical system given by (4.6) and (4.7) is
exponentially stable with respect to x
1
uniformly in x
20
.
viii) If D = R
n
1
and there exist a continuously differentiable function V :
R
n
1
× R
n
2
→ R and positive constants α, β, γ, p ≥ 1 satisfying (4.55)
and (4.56), then the nonlinear dynamical system given by (4.6) and
(4.7) is globally exponentially stable with respect to x
1
uniformly in
x
20
.
Proof. The proof is virtually identical to the proof of Theorem 4.1
and is left as an exercise for the reader.
4.3 Stability Theory for Nonlinear Time-Varying Systems
In this section, we use the results of Section 4.2 to extend Lyapunov’s direct
method to nonlinear time-varying systems, thereby providing a unification
between partial stability theory for au tonomous systems and stability th eory
for time-varying systems. Specifically, we consider the nonlinear time-
varying dynamical system
˙x(t) = f(t, x(t)), x(t
0
) = x
0
, t ≥ t
0
, (4.57)
where x(t) ∈ D, t ≥ t
0
, D ⊆ R
n
such th at 0 ∈ D, f : [t
0
, t
1
) × D → R
n
is
such that f (·, ·) is jointly continuous in t and x, and for every t ∈ [t
0
, t
1
),
f(t, 0) = 0 and f(t, ·) is locally Lipschitz in x uniformly in t for all t in

NonlinearBook10pt November 20, 2007
226 CHAPTER 4
compact subsets of [0, ∞). Note that under the above assumptions the
solution x(t), t ≥ t
0
, to (4.57) exists and is unique over the interval [t
0
, t
1
).
The following definition provides eight types of stability for the nonlinear
time-varying dynamical system (4.57).
Definition 4.2. i) The nonlinear time-varying dynamical system (4.57)
is Lyapunov stable if, for every ε > 0 and t
0
∈ [0, ∞), there exists δ =
δ(ε, t
0
) > 0 such that kx
0
k < δ implies that kx(t)k < ε for all t ≥ t
0
.
ii) The n on linear time-varying dynamical system (4.57) is u niformly
Lyapunov stable if, for every ε > 0, there exists δ = δ(ε) > 0 such that
kx
0
k < δ implies that kx(t)k < ε for all t ≥ t
0
and for all t
0
∈ [0, ∞).
iii) The nonlinear time-varying dynamical system (4.57) is asymptot-
ically stable if it is Lyapunov stable and for every t
0
∈ [0, ∞), there exists
δ = δ(t
0
) > 0 such that kx
0
k < δ implies that lim
t→∞
x(t) = 0.
iv) The nonlinear time-varying dynamical system (4.57) is uniformly
asymptotically stable if it is uniformly Lyapunov stable and there exists δ > 0
such that kx
0
k < δ implies that lim
t→∞
x(t) = 0 uniformly in t
0
and x
0
for
all t
0
∈ [0, ∞).
v) The nonlinear time-varying dynamical system (4.57) is globally
asymptotically stable if it is Lyapunov stable and lim
t→∞
x(t) = 0 for all
x
0
∈ R
n
and t
0
∈ [0, ∞).
vi) The nonlinear time-varying dynamical system (4.57) is globally
uniformly asymptotically stable if it is uniformly Lyapunov stable and
lim
t→∞
x(t) = 0 uniformly in t
0
and x
0
for all x
0
∈ R
n
and t
0
∈ [0, ∞).
vii) The nonlinear time-varying dynamical system (4.57) is (uniformly)
exponentially stable if there exist scalars α, β, δ > 0 such that kx
0
k < δ
implies that kx(t)k ≤ αkx
0
ke
−βt
, t ≥ t
0
and t
0
∈ [0, ∞).
viii) The nonlinear time-varying dynamical system (4.57) is globally
(uniformly) exponentially stable if there exist scalars α, β > 0 such that
kx(t)k ≤ αkx
0
ke
−βt
, t ≥ t
0
, for all x
0
∈ R
n
and t
0
∈ [0, ∞).
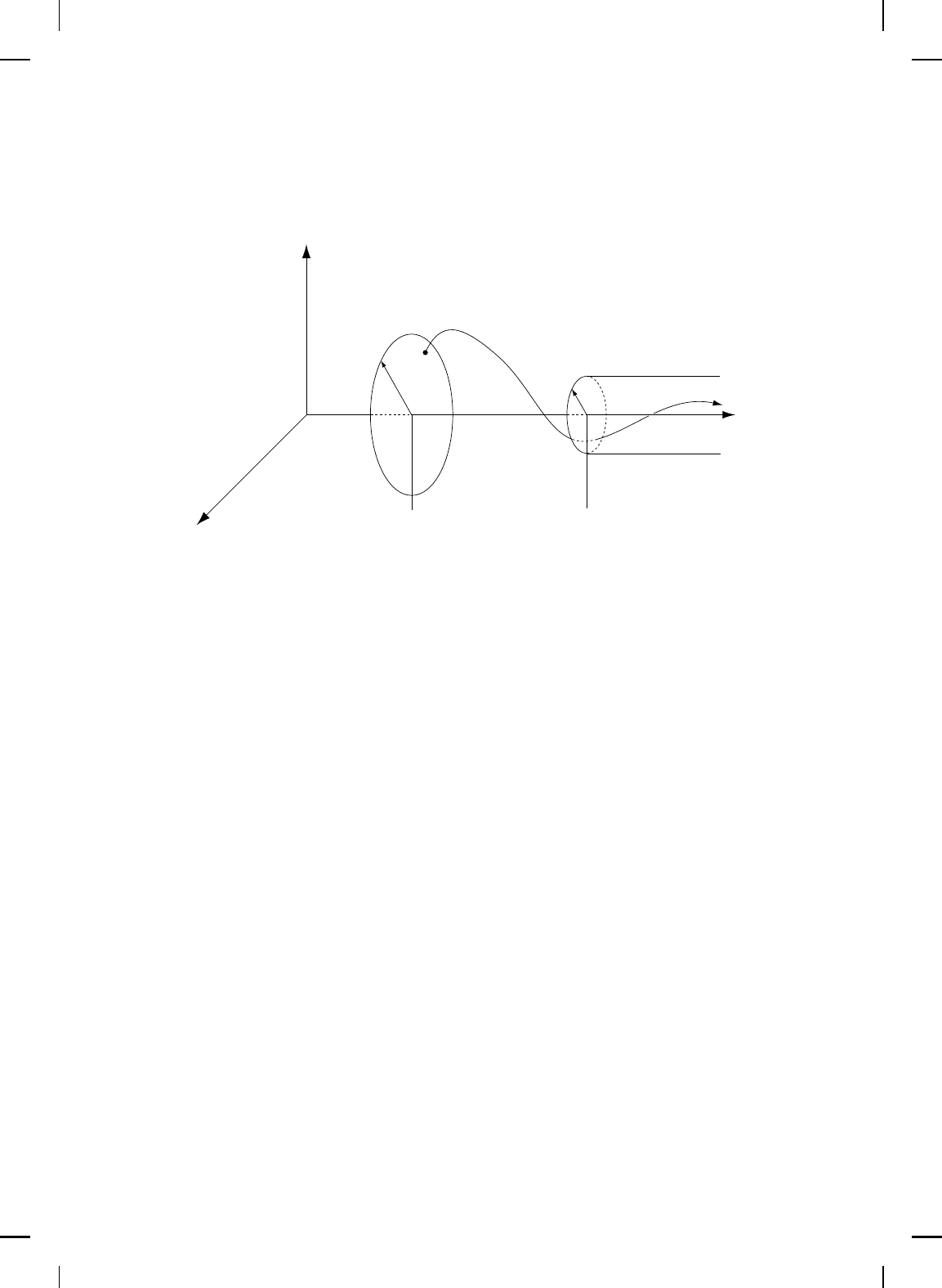
Note that uniform asymptotic stability is equivalent to uniform
Lyapunov stability and the existence of δ > 0 such that, for every ε > 0,
there exists T = T (ε) > 0 such that kx
0
k < δ and t
0
≥ 0 implies that
kx(t)k < ε for all t ≥ t
0
+ T (ε). That is, for every initial condition in a ball
of radius δ at time t = t
0
, the graph of the solution of (4.57) is guaranteed
to be inside a given cylinder for all t > t
0
+ T (ε) (see Figure 4.5). Uniform
Lyapunov stability and uniform asymptotic stability can be additionally
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 227
characterized by class K and class KL functions. For details, see Problems
4.5 and 4.6.
ε
δ
t
x
1
x
2
t
0
t
0
+ T (ε)
Figure 4.5 Uniform asympt otic stability.
Example 4.4. To elucidate the difference between Lyapunov stability
and uniform Lyapunov stability consider the scalar linear dynamical system
adopted from [307] given by
˙x(t) = (6t sin t − 2t)x(t), x(t
0
) = x
0
, t ≥ t
0
. (4.58)
The solution of (4.58) is given by
x(t) = x(t
0
)e
R
t
t
0
(6s sin s−2s)ds
= x(t
0
)e
[6 sin t−6t cos t−t
2
−6 sin t
0
+6t
0
cos t
0
+t
2
0
]
. (4.59)
Clearly, for every fixed t
0
, the term −t
2
in (4.59) will eventually dominate,
which shows that the exponential term in (4.59) is bounded by a constant
σ(t
0
) dependent on t
0
for all t ≥ t
0
. Hence, |x(t)| < |x(t
0
)|σ(t
0
), t ≥ t
0
.
Now, given ε > 0, we can choose δ = δ(ε, t
0
) = ε/σ(t
0
), which shows that
|x(t
0
)| < δ implies |x(t)| < ε, t ≥ t
0
, and hence, the zero solution x(t) ≡ 0
to (4.58) is Lyapunov stable.
Next, suppose t
0
takes the successive values t
0
= 2nπ, n = 0, 1, 2, . . .,
and x(t) is evaluated π seconds later for each n. In this case,
x(t
0
+ π) = x(t
0
)e
[(4n+1)(6−π)π]
, (4.60)
NonlinearBook10pt November 20, 2007
228 CHAPTER 4
which implies that, for x(t
0
) 6= 0,
x(t
0
+ π)
x(t
0
)
= e
[(4n+1)(6−π)π]
→ ∞ as n → ∞. (4.61)
Since σ(t
0
) ≥ e
[(4n+1)(6−π)π]
it follows that σ(t
0
) → ∞ as n → ∞. Thus,
given ε > 0, for stability we need δ = ε/σ(t
0
) → 0 as t
0
→ ∞, which shows
that we cannot choose δ independent of t
0
to satisfy the requirement for
uniform Lyapunov stability. △
Next, using Theorem 4.1 we present sufficient conditions for stability
of the n on linear time-varying dynamical system (4.57). For the following
result define
˙
V (t, x)
△
=
∂V
∂t
(t, x) +
∂V
∂x
(t, x)f(t, x),
for a given continuously differentiable fu nction V : [0, ∞) × D → R.
Theorem 4.6. Consider the time-varying dynamical system given by
(4.57). Then the following statements hold:
i) I f there exist a continuously differentiable function V : [0, ∞)×D → R
and a class K function α(·) such that
V (t, 0) = 0, t ∈ [0, ∞), (4.62)
α(kxk) ≤ V (t, x), (t, x) ∈ [0, ∞) ×D, (4.63)
˙
V (t, x) ≤ 0, (t, x) ∈ [0, ∞) × D, (4.64)
then the nonlinear time-varying dynamical system given by (4.57) is
Lyapunov s table.
ii) If there exist a continuously differentiable function V : [0, ∞)×D → R
and class K functions α(·), β(·) satisfying (4.63), (4.64), and
V (t, x) ≤ β(kxk), (t, x) ∈ [0, ∞) × D, (4.65)
then the nonlinear time-varying dynamical system given by (4.57) is
uniformly Lyapunov stable.
iii) If there exist continuously differentiable functions V : [0, ∞) ×D → R
and W : [0, ∞) × D → R, and class K functions α(·), β(·), and γ(·)
such that
˙
W (·, x(·)) is bounded from below or above, (4.62) and (4.63)
hold, and
W (t, 0) = 0, t ∈ [0, ∞), (4.66)
β(kxk) ≤ W (t, x), (t, x) ∈ [0, ∞) × D, (4.67)
˙
V (t, x) ≤ −γ(W (t, x)), (t, x) ∈ [0, ∞) × D, (4.68)
then the zero solution x(t) ≡ 0 to (4.57) is asymptotically stable.
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 229
iv) If there exist a continuously differentiable function V : [0, ∞)×D → R
and class K functions α(·), β(·), γ(·) s atisfying (4.63), (4.65), and
˙
V (t, x) ≤ −γ(kxk), (t, x) ∈ [0, ∞) × D, (4.69)
then the nonlinear time-varying dynamical system given by (4.57) is
uniformly asymptotically stable.
v) If D = R
n
and there exist continuously differentiable functions V :
[0, ∞) ×D → R and W : [0, ∞) ×D → R, class K functions β(·), γ(·),
and a class K
∞
function α(·) such that
˙
W (·, x(·)) is bounded from
below or above, and (4.62), (4.63), and (4.66)–(4.68) hold, then the
zero solution x(t) ≡ 0 to (4.57) is globally asymptotically stable.
vi) If D = R
n
and there exist a continuously differentiable function V :
[0, ∞) ×R
n
→ R, a class K function γ(·), class K
∞
functions α(·), β(·)
satisfying (4.63), (4.65), and (4.69), then the nonlinear time-varying
dynamical system given by (4.57) is globally un iformly asymptotically
stable.
vii) If there exist a continuously differentiable function V : [0, ∞)×D → R
and positive constants α, β, γ, p such th at p ≥ 1 and
αkxk
p
≤ V (t, x) ≤ βkxk
p
, (t, x) ∈ [0, ∞) ×D, (4.70)
˙
V (t, x) ≤ −γkxk
p
, (t, x) ∈ [0, ∞) × D, (4.71)
then the nonlinear time-varying dynamical system given by (4.57) is
(uniformly) exponentially stable.
viii) If D = R
n
and there exist a continuously differentiable function V :
[0, ∞) ×R
n
→ R and positive constants α, β, γ, p ≥ 1 satisfying (4.70)
and (4.71), then the nonlinear time-varying dynamical system given
by (4.57) is globally (uniformly) exponentially stable.
Proof. First note that, requiring the existence of a Lyapunov function
V : [0, ∞) ×D → R satisfyin g the conditions above, it follows from Theorem
2.39 that there exists a unique solution to (4.57) for all t ≥ t
0
. Next, let
n
1
= n, n
2
= 1, x
1
(t − t
0
) = x(t), x
2
(t − t
0
) = t, f
1
(x
1
, x
2
) = f(x
2
, x
1
), and
f
2
(x
1
, x
2
) = 1. Now, note that with τ = t−t
0
, the solution x(t), t ≥ t
0
, to th e
nonlinear time-varying dynamical system (4.57) is equivalently characterized
by the solution x
1
(τ), τ ≥ 0, to the nonlinear autonomous dynamical system
˙x
1
(τ) = f
1
(x
1
(τ), x
2
(τ)), x
1
(0) = x
0
, τ ≥ 0,
˙x
2
(τ) = 1, x
2
(0) = t
0
,
where ˙x
1
(·) and ˙x
2
(·) denote differentiation with respect to τ . Furthermore,
note th at since f (t, 0) = 0, t ≥ 0, it follows that f
1
(0, x
2
) = 0, for every
x
2
∈ R
n
2
. Now, the result is a dir ect consequence of Theorem 4.1.
NonlinearBook10pt November 20, 2007
230 CHAPTER 4
It is important to note that (4.63) along with (4.69) are not sufficient
to guarantee asymptotic stability of a nonlinear time-varying dynamical
system. This is shown by the following counterexample adopted from [306].
Example 4.5. Consider th e scalar nonlinear dynamical sys tem given
by
˙x(t) =
˙g(t)
g(t)
x(t), x(0) = x
0
, t ≥ 0, (4.72)
where
g(t) =
∞
X
n=1
1
1 + n
4
(t − n)
2
, t ≥ 0. (4.73)
Note that it can be shown that for every t ≥ 0, g(t) is well defined and
g(t) > 0, t ≥ 0, and hence, the right-hand sid e of (4.72) is well defined.
Furth ermore, note that the solution to (4.72) is given by x(t) =
g(t)
g(0)
x
0
.
Next, note that for all m ∈ Z
+
,
g(m) =
∞
X
n=1
1
1 + n
4
(m − n)
2
> 1.
Now, let t ∈ [0, ∞) and let n
1
, n
2
∈ Z
+
be su ch that n
1
≤ t ≤ n
2
. In this
case, for all n ∈ Z
+
\ {n
1
, n
2
},
1
1 + n
4
(t − n)
2
≤
1
n
4
and
1
1 + n
4
i
(t −n
i
)
2
≤ 1, i = 1, 2.
Hence, it follows that
g(t) < 2 +
∞
X
n=1
1
n
4
<
10
3
, t ≥ 0, (4.74)
which implies that |||g|||
∞
< 10/3.
Next, note that
Z
∞
0
g(t)dt =
Z
∞
0
∞
X
n=1
1
1 + n
4
(t − n)
2
dt
=
∞
X
n=1
Z
∞
0
1
1 + n
4
(t − n)
2
dt
=
∞
X
n=1
Z
∞
−n
3
1
n
2
(1 + t
2
)
dt
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 231
<
∞
X
n=1
Z
∞
−∞
1
n
2
(1 + t
2
)
dt
=
∞
X
n=1
π
n
2
< 2π,
which implies that |||g|||
1
< ∞. Fu rthermore, note that
Z
∞
0
g
2
(t)dt ≤ |||g|||
∞
Z
∞
0
g(t)dt = |||g|||
∞
|||g|||
1
<
20π
3
.
Now, consider the Lyapunov function candidate
V (t, x) =
x
2
g
2
(t)
γ
2
+
Z
∞
t
g
2
(s)ds
, (4.75)
and n ote that V (t, 0) = 0, t ≥ 0. Sin ce g(t) ≤ γ, t ≥ 0,
V (t, x) ≥ γ
2
x
2
g
2
(t)
≥ x
2
, t ∈ [0, ∞) x ∈ R,
and since
R
∞
0
g
2
(t)dt < 20π/3, V (t, x) is a well-defined function. Now, it
is easy to verify that
˙
V (t, x) = −x
2
. Hence, V (t, x) satisfies (4.62), (4.63),
and (4.69), which implies that the zero solution x(t) ≡ 0 is Lyapunov stable.
However, since lim
t→∞
g(t) 6= 0 (since g(m) > 1, m ∈ Z
+
) it follows that
the zero solution x(t) ≡ 0 to (4.72) is not asymptotically stable. △
In light of Theorem 4.6 it follows that Theorem 4.1 can be trivially
extended to address partial stability for time-varying dynamical systems.
Specifically, consider the nonlinear time-varying dynamical system
˙x
1
(t) = f
1
(t, x
1
(t), x
2
(t)), x
1
(t
0
) = x
10
, t ≥ t
0
, (4.76)
˙x
2
(t) = f
2
(t, x
1
(t), x
2
(t)), x
2
(t
0
) = x
20
, (4.77)
where x
1
∈ D, x
2
∈ R
n
2
, f
1
: [t
0
, t
1
) ×D×R
n
2
→ R
n
1
is such that, for every
t ∈ [t
0
, t
1
) and x
2
∈ R
n
2
, f
1
(t, 0, x
2
) = 0 and f
1
(t, ·, x
2
) is locally Lipschitz in
x
1
, and f
2
: [t
0
, t
1
)×D×R
n
2
→ R
n
2
is such that, for every x
1
∈ D, f
2
(·, x
1
, ·)
is locally Lipschitz in x
2
. Next, let ˆx
1
(t−t
0
) = x
1
(t), ˆx
2
(t−t
0
) = [x
T
2
(t) t]
T
,
ˆ
f
1
(ˆx
1
, ˆx
2
) = f
1
(t, x
1
, x
2
), and
ˆ
f
2
(ˆx
1
, ˆx
2
) = [f
T
2
(t, x
1
, x
2
) 1]
T
. Now, note that
with τ = t − t
0
, the solution (x
1
(t), x
2
(t)), t ≥ t
0
, to the nonlinear time-
varying dynamical sy s tem (4.76) and (4.77) is equivalently characterized by
the solution (ˆx
1
(τ), ˆx
2
(τ)), τ ≥ 0, to the nonlinear autonomous dynamical
system
˙
ˆx
1
(τ) =
ˆ
f
1
(ˆx
1
(τ), ˆx
2
(τ)), ˆx
1
(0) = x
10
, τ ≥ 0, (4.78)
˙
ˆx
2
(τ) =
ˆ
f
2
(ˆx
1
(τ), ˆx
2
(τ)), ˆx
2
(0) = [x
T
20
t
0
]
T
, (4.79)

NonlinearBook10pt November 20, 2007
232 CHAPTER 4
where
˙
ˆx
1
(·) and
˙
ˆx
2
(·) denote differentiation with r espect to τ. Hence,
Theorem 4.1 can be used to derive sufficient conditions for partial stability
results for the nonlinear time-varying dynamical systems of the form (4.76)
and (4.77). Of course, in this case it is important to note that partial
stability may be uniform with respect to either or both of x
20
and t
0
.
Using Theorems 4.1 and 4.6 we present some insight on the complexity
of analyzing stability of linear, time-varying systems. Specifically, let
f(t, x) = A(t)x, where A : [0, ∞) → R
n×n
is continuous, so that (4.57)
becomes
˙x(t) = A(t)x(t), x(t
0
) = x
0
, t ≥ t
0
. (4.80)
Now, in order to analyze the stability of (4.80), let n
1
= n, n
2
= 1, x
1
(t −
t
0
) = x(t), x
2
(t − t
0
) = t, f
1
(x
1
, x
2
) = A(t)x, and f
2
(x
1
, x
2
) = 1. Hence,
the solution x(t), t ≥ t
0
, to (4.80) can be equivalently characterized by the
solution x
1
(τ), τ ≥ 0, to the nonlinear autonomous dynamical system
˙x
1
(τ) = A(x
2
(τ))x
1
(τ), x
1
(0) = x
0
, τ ≥ 0, (4.81)
˙x
2
(τ) = 1, x
2
(0) = t
0
, (4.82)
where ˙x
1
(·) and ˙x
2
(·) denote differentiation with respect to τ. It is clear
from (4.81) and (4.82) that in spite of the fact that (4.80) is a linear system,
its solutions are in herently characterized by a nonlinear system of the form
(4.81) and (4.82).
Example 4.6. Consider the linear time-varying dynamical system
˙x
1
(t) = −x
1
(t) −e
−t
x
2
(t), x
1
(0) = x
10
, t ≥ 0, (4.83)
˙x
2
(t) = x
1
(t) − x
2
(t), x
2
(0) = x
20
. (4.84)
To examine stability of this system, consider the Lyapunov function
candidate V (t, x) = x
2
1
+ (1 + e
−t
)x
2
2
. Note that since
x
2
1
+ x
2
2
≤ V (t, x) ≤ x
2
1
+ 2x
2
2
, (x
1
, x
2
) ∈ R × R, t ≥ 0, (4.85)
it follows that V (t, x) is positive definite, radially u nbounded and satisfies
(4.63) and (4.65). Next, s ince
˙
V (t, x) = −2x
2
1
+ 2x
1
x
2
− 2x
2
2
− 3e
−t
x
2
2
≤ −2x
2
1
+ 2x
1
x
2
− 2x
2
2
= −x
T
Rx
≤ −λ
min
(R)kxk
2
2
, (4.86)
where
R =
2 −1
−1 2
> 0
and x = [x
1
x
2
]
T
, it follows from vi) and vii) of Theorem 4.6 with p = 2
that the zero solution (x
1
(t), x
2
(t)) ≡ (0, 0) to (4.83) and (4.84) is globally
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 233
exponentially stable. △
Example 4.7. It is important to note that it is not always necessary to
construct a time-varying Lyapunov function to show stability for a nonlinear
time-varying dynamical system. I n particular, consider the nonlinear time-
varying dynamical system
˙x
1
(t) = −x
3
1
(t) + (sin ωt)x
2
(t), x
1
(0) = x
10
, t ≥ 0, (4.87)
˙x
2
(t) = −(sin ωt)x
1
(t) −x
3
2
(t), x
2
(0) = x
20
. (4.88)
To show that the origin is globally uniformly asymptotically stable, consider
the time-invariant Lyapunov function candidate V (x) =
1
2
(x
2
1
+x
2
2
). Clearly,
V (x), x ∈ R
2
, is positive definite and r ad ially unbounded. Furthermore,
˙
V (x) = x
1
[−x
3
1
+ (sin ωt)x
2
] + x
2
[−(sin ωt)x
1
− x
3
2
]
= −x
4
1
− x
4
2
< 0, (x
1
, x
2
) ∈ R ×R, (x
1
, x
2
) 6= (0, 0), (4.89)
which sh ows that the zero solution (x
1
(t), x
2
(t)) ≡ (0, 0) to (4.87) and (4.88)
is globally uniformly asymptotically stable. △
Example 4.8. Consider the linear time-varying dy namical system
˙x(t) = A(t)x(t), x(t
0
) = x
0
, t ≥ t
0
, (4.90)
where A : [0, ∞) → R
n×n
is continuous. To examine the stability of
this system, consider the quadratic Lyapunov function candidate V (t, x) =
x
T
P (t)x, where P : [0, ∞) → R
n×n
is a continuously differentiable,
uniformly bounded, and positive-definite matrix fu nction (that is, P (t) is
positive definite for every t ≥ t
0
) satisfying
−
˙
P (t) = A
T
(t)P (t) + P (t)A(t) + R(t), (4.91)
where R(·) is continuous s uch that R(t) ≥ γI
n
> 0, γ > 0, for all t ≥
t
0
. Now, since P (·) is continuously differentiable, uniformly bounded, and
positive definite it follows that there exist α, β > 0 such that
0 < αI
n
≤ P (t) ≤ βI
n
, t ≥ t
0
, (4.92)
and h en ce,
αkxk
2
2
≤ V (t, x) ≤ βkxk
2
2
. (4.93)
Thus , V (t, x) is positive definite and radially unb ou nded. Next, since
˙
V (t, x) = x
T
˙
P (t)x + 2x
T
P (t)A(t)x
= x
T
[
˙
P (t) + A
T
(t)P (t) + P (t)A(t)]x
= −x
T
R(t)x
≤ −γkxk
2
2
, (4.94)
NonlinearBook10pt November 20, 2007
234 CHAPTER 4
it follows from vi) and vii) of Theorem 4.6 with p = 2 that the zero solution
x(t) ≡ 0 to (4.90) is globally exponentially stable. Hence, a sufficient
condition f or global exponential stability for a linear time-varying system is
the existence of a continuously d ifferentiable, bounded, and positive-definite
matrix function P : [0, ∞) → R
n×n
satisfying (4.91). △
In C hapter 3 it was shown that for time-invariant dynamical systems
the invariance principle can be used to relax the strict negative-definiteness
condition on the Lyapunov derivative while still ensuring asymptotic
stability of the origin by showing that the set R where the Lyapunov
derivative vanishes contains no invariant set other than the origin. For time-
varying systems, there does not exist an analogous result for establishing
uniform asymptotic stability since, in general, positive limit sets for time-
varying systems are not invariant. However, the following theorem provides
a similar, albeit weaker, result for time-varying systems.
Theorem 4.7 (LaSa lle-Yoshizawa Theorem). Consider the time-
varying dynamical system (4.57) and assume [0, ∞) × D is a positively
invariant set with respect to (4.57) where f (t, ·) is Lipschitz in x, uniformly
in t. Furthermore, assume there exist functions V : [0, ∞) × D → R and
W, W
1
, W
2
: D → R such that V (·, ·) is continuously differentiable, W
1
(·)
and W
2
(·) are continuous and positive definite, W (·) is continuous and
nonnegative definite, and, for all (t, x) ∈ [0, ∞) × D,
W
1
(x) ≤ V (t, x) ≤ W
2
(x), (4.95)
˙
V (t, x) ≤ −W (x). (4.96)
Then there exists D
0
⊆ D su ch that for all (t
0
, x
0
) ∈ [0, ∞) × D
0
, x(t) →
R
△
= {x ∈ D : W (x) = 0} as t → ∞ . If, in addition, D = R
n
and W
1
(·) is
radially unbounded, then for all (t
0
, x
0
) ∈ [0, ∞) × R
n
, x(t) → R
△
= {x ∈
R
n
: W (x) = 0} as t → ∞.
Proof. The proof is a direct consequence of Theorem 4.2 with n
1
= n,
n
2
= 1, x
1
(t −t
0
) = x(t), x
2
(t − t
0
) = t, f
1
(x
1
, x
2
) = f(t, x), f
2
(x
1
, x
2
) = 1,
and V (x
1
, x
2
) = V (t, x).
If W is a homeomorphism and W
−1
(0) = {0}, then Theorem 4.7
establishes attraction to the origin. Alternatively, if, in place of (4.96),
˙
V (t, x) ≤ 0, (t, x) ∈ [0, ∞) × D, and the integral of
˙
V (t, x) satisfies the
inequality
Z
t+ε
t
˙
V (τ, s(τ, t, x))dτ ≤ − αV (t, x), (4.97)
where α ∈ (0, 1), for all t ≥ 0 and x ∈ D, and some ε > 0, then uniform
asymptotic stability of the zero solution x(t) ≡ 0 to (4.57) can be established.
This result is left as an exercise for the r eader.