Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 255
Note that by construction, x(·) is continuously differentiable on R
+
\{T (x
0
)}
and satisfies (4.177) on R
+
\{T (x
0
)}. Furthermore, since f (·) is continuous,
lim
t→T (x
0
)
−
˙x(t) = lim
t→T (x
0
)
−
f(x(t)) = 0 = lim
t→T (x
0
)
+
˙x(t), (4.183)
and hence, x(·) is continuously differentiable at T (x
0
) and x(·) satisfies
(4.177). Hence, x(·) is a solution of (4.177) on R
+
.
To show uniqueness, assume y(·) is a solution of (4.177) on R
+
satisfying y(0) = x
0
. I n this case, x(·) and y(·) agree on [0, T (x
0
)),
and by continuity, x(·) and y(·) must also agree on [0, T (x
0
)], and hence,
y(T (x
0
)) = 0. Now, Lyapunov stability implies that y(t) = 0 for t > T (x),
which proves uniqueness. Finally, by definition, s
x
0
(t) = x(t), and hence,
s
x
0
(·) is defined on R
+
and satisfies s
x
0
(t) = 0 on [T (x
0
), ∞) for every
x
0
∈ N. This proves the result.
It follows f rom Proposition 4.5 that if the zero solution x(t) ≡ 0 to
(4.177) is finite-time stable, then the solutions of (4.177) define a continuous
global semiflow on N; that is, s : R
+
× N → N is jointly continuous and
satisfies s(0, x) = x and s(t, s(τ, x)) = s(t + τ, x) for every x ∈ N and
t, τ ∈ R
+
. Furthermore, s(·, ·) satisfies s(T (x) + t, x) = 0 for all x ∈ N and
t ∈ R
+
. Finally, it also follows f rom Proposition 4.5 that we can extend T (·)
to all of N by d efi ning T (0) , 0. It is easy to see from Definition 4.7 that
T (x) = inf{t ∈ R
+
: s(t, x) = 0}, x ∈ N. (4.184)
The following example adopted from [55] presents a finite-time stable
system with a continuous but non-Lips chitzian vector field.
Example 4.12. Consider the scalar nonlinear dynamical system given
by
˙x(t) = −k sign(x(t))|x(t)|
α
, x(0) = x
0
, t ≥ 0, (4.185)
where x
0
∈ R, s ign(x)
△
=
x
|x|
, x 6= 0, sign(0)
△
= 0, k > 0, and α ∈ (0, 1). The
right-hand side of (4.185) is continuous everywhere and locally Lipschitz
everywhere except the origin. Hence, every initial condition in R\{0} has
a unique solution in forward time on a sufficiently small time interval. The
solution to (4.185) is obtained by d ir ect integration and is given by
s(t, x
0
)
=
sign(x
0
)
|x
0
|
1−α
− k(1 −α)t
1
1−α
, t <
1
k(1−α)
|x
0
|
1−α
, x
0
6= 0,
0, t ≥
1
k(1−α)
|x
0
|
1−α
, x
0
6= 0,
0, t ≥ 0, x
0
= 0.
(4.186)
NonlinearBook10pt November 20, 2007
256 CHAPTER 4
It is clear from (4.186) that i) in Definition 4.7 is satisfied with N = D = R
and with the settling-time function T : R → R
+
given by
T (x
0
) =
1
k(1 −α)
|x
0
|
1−α
, x
0
∈ R. (4.187)
Lyapunov stability follows by considering th e Lyapunov function V (x) = x
2
,
x ∈ R. Thus, the zero solution x(t) ≡ 0 to (4.185) is globally fin ite-time
stable. △
The next proposition shows that the settling-time function of a finite-
time stable system is continuous on N if and only if it is continuous at the
origin.
Proposition 4.6. Consider the nonlinear dynamical s ystem (4.177).
Assume that the zero solution x(t) ≡ 0 to (4.177) is fi nite-time stable, let
N ⊆ D be as in Definition 4.7, and let T : N → R
+
be the settling-time
function. Then T (·) is continuous on N if and only if T (·) is continuous at
x = 0.
Proof. Necessity is immediate. To show sufficiency, suppose T (·) is
continuous at x = 0, let y ∈ N, and consider the sequence {y
n
}
∞
n=0
in N
converging to y. Let τ
−
= lim inf
n→∞
T (y
n
) and τ
+
= lim sup
n→∞
T (y
n
).
Note that τ
−
, τ
+
∈ R
+
and
τ
−
≤ τ
+
. (4.188)
Next, let {y
+
m
}
∞
m=0
be a subsequ en ce of {y
n
}
∞
n=0
such that T (y
+
m
) → τ
+
as m → ∞. The sequ en ce {T (y), y
+
m
}
∞
m=0
converges in R
+
×N to (T (y), y).
Now, it follows from continuity and s(T (x) + t, x) = 0 for all x ∈ N and
t ∈ R
+
that s(T (y), y
+
m
) → s(T (y), y) = 0 as m → ∞. Since, by assumption,
T (·) is continuous at x = 0, T (s(T (y), y
+
m
)) → T (0) = 0 as m → ∞. Next,
using (4.184), the semigroup property s(t, s(τ, x)) = s(t + τ, x), x ∈ N and
t, τ ∈ R
+
, and s(T (x) + t, x) = 0, x ∈ N and t, τ ∈ R
+
, it follows that
T (s(t, x)) = max{T (x) − t, 0}. (4.189)
Now, with t = T (y) and x = y
+
m
, it follows from (4.189) th at max{T (y
+
m
) −
T (y), 0} → 0 as m → ∞. Hence, max{τ
+
− T (y), 0} = 0, that is,
τ
+
≤ T (y). (4.190)
Finally, let {y
−
m
}
∞
m=0
be a subsequence of {y
m
}
∞
n=0
such that T (y
−
m
) →
τ
−
as m → ∞. Now, it follows from (4.188) and (4.190) that τ
−
∈ R
+
,
and hence, the sequence {T (y
−
m
), y
−
m
}
∞
m=0
converges in R
+
× N to (τ
−
, y).
Since s(·, ·) is jointly continuous, it follows that s(T (y
−
m
), y
−
m
) → s(τ
−
, y) as
m → ∞. Now, s(T (x) + t, x) = 0 for all x ∈ N and t ∈ R
+
implies that
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 257
s(T (y
−
m
), y
−
m
) = 0 for each m. Hence, s(τ
−
, y) = 0 and, by (4.184),
T (y) ≤ τ
−
. (4.191)
Now, it follows from (4.188), (4.190), and (4.191) that τ
−
= τ
+
= T (y), and
hence, T (y
n
) → T (y) as n → ∞, which proves that T (·) is continuous on
N.
Next, we present sufficient conditions for fi nite-time stability using a
Lyapunov function involving a scalar differential inequality.
Theorem 4.17. Consider the nonlinear dynamical system (4.177).
Assume there exist a continuously differentiable f unction V : D → R
+
,
real numbers c > 0 and α ∈ (0, 1), and a neighborhood M ⊆ D of the origin
such that
V (0) = 0, (4.192)
V (x) > 0, x ∈ M\{0}, (4.193)
V
′
(x)f(x) ≤ −c(V (x))
α
, x ∈ M\{0}. (4.194)
Then the zero solution x(t) ≡ 0 to (4.177) is finite-time stable. Moreover,
there exist an open neighborhood N of the origin and a settling-time function
T : N → [0, ∞) such that
T (x
0
) ≤
1
c(1 −α)
(V (x
0
))
1−α
, x
0
∈ N, (4.195)
and T (·) is continuous on N. If, in addition, D = R
n
, V (·) is radially
unbounded, and (4.194) holds on R
n
, th en the zero s olution x(t) ≡ 0 to
(4.177) is globally finite-time stable.
Proof. Since V (·) is positive definite and
˙
V (·) takes negative values
on M\{0}, it follows that x(t) ≡ 0 is the unique solution of (4.177) for t ≥ 0
satisfying x(0) = 0 [4, Section 3.15], [474, Theorem 1.2, p. 5]. Thus, for
every initial condition in D, (4.177) has a unique solution in forward time.
Let V ⊆ M be a bounded open set such that 0 ∈ V and V ⊂ D.
Then ∂V is compact and 0 6∈ ∂V. Now, it follows from Weierstrass’ theorem
(Theorem 2.13) that the continuous function V (·) attains a minimum on
∂V and since V (·) is positive definite, min
x∈∂V
V (x) > 0. Let 0 < β <
min
x∈∂V
V (x) and D
β
△
= {x ∈ V : V (x) ≤ β}. It follows from (4.194)
that D
β
⊂ M is positively invariant with respect to (4.177). Furthermore,
it follows from (4.194), the positive definiteness of V (·), and standard
Lyapunov arguments that, for every ε > 0, there exists δ > 0 such that
B
δ
(0) ⊂ D
β
⊂ M and
kx(t)k ≤ ε, kx
0
k < δ, t ∈ I
x
0
. (4.196)
NonlinearBook10pt November 20, 2007
258 CHAPTER 4
Moreover, since the solution x(t) to (4.177) is bounded for all t ∈ I
x
0
, it can
be extended on the semi-infinite interval [0, ∞), and hence, x(t) is defined
for all t ≥ 0. Furthermore, it follows from Theorem 4.16, with w(y) = −cy
α
and z(t) = s(t, V (x
0
)), where α ∈ (0, 1), that
V (x(t)) ≤ s(t, V (x
0
)), x
0
∈ B
δ
(0), t ∈ [0, ∞), (4.197)
where s(·, ·) is given by (4.186) with k = c. Now, it follows from (4.186),
(4.197), and the positive definiteness of V (·) that
x(t) = 0, t ≥
1
c(1 − α)
(V (x
0
))
1−α
, x
0
∈ B
δ
(0), (4.198)
which implies finite-time convergence of the trajectories of (4.177) for all
x
0
∈ B
δ
(0). This along with (4.196) imp lies finite-time stability of the zero
solution x(t) ≡ 0 to (4.177) with N
△
= B
δ
(0).
Since s(0, x) = x and s(·, ·) is continuous, inf{t ∈ R
+
: s(t, x) = 0} > 0,
x ∈ N\{0}. Furthermore, it follows from (4.198) that inf{t ∈ R
+
: s(t, x) =
0} < ∞, x ∈ N. Now, defining T : N → R
+
by using (4.184), (4.195) is
immediate from (4.198). Finally, the right-hand side of (4.195) is continuous
at the origin, and hence, by Pr oposition 4.6, continuous on N.
Finally, if D = R
n
and V (·) is radially unbounded, then global finite-
time stability follows using standard arguments.
Example 4.13. Consider the nonlinear d y namical system G given by
˙x(t) = −(x(t))
1
3
− (x(t))
1
5
, x(0) = x
0
, t ≥ 0, (4.199)
where x ∈ R. For this system, we show that the zero solution x(t) ≡ 0 to
(4.199) is globally finite-time stable. To see this, consider V (x) = x
4
3
and
let D = R. Then,
˙
V (x) = −
4
3
(x
2
3
+ x
8
15
) ≤ −
4
3
x
2
3
= −
4
3
(V (x))
1
2
for all
x ∈ R. Hence, it follows from Theorem 4.17 that the zero solution x(t) ≡ 0
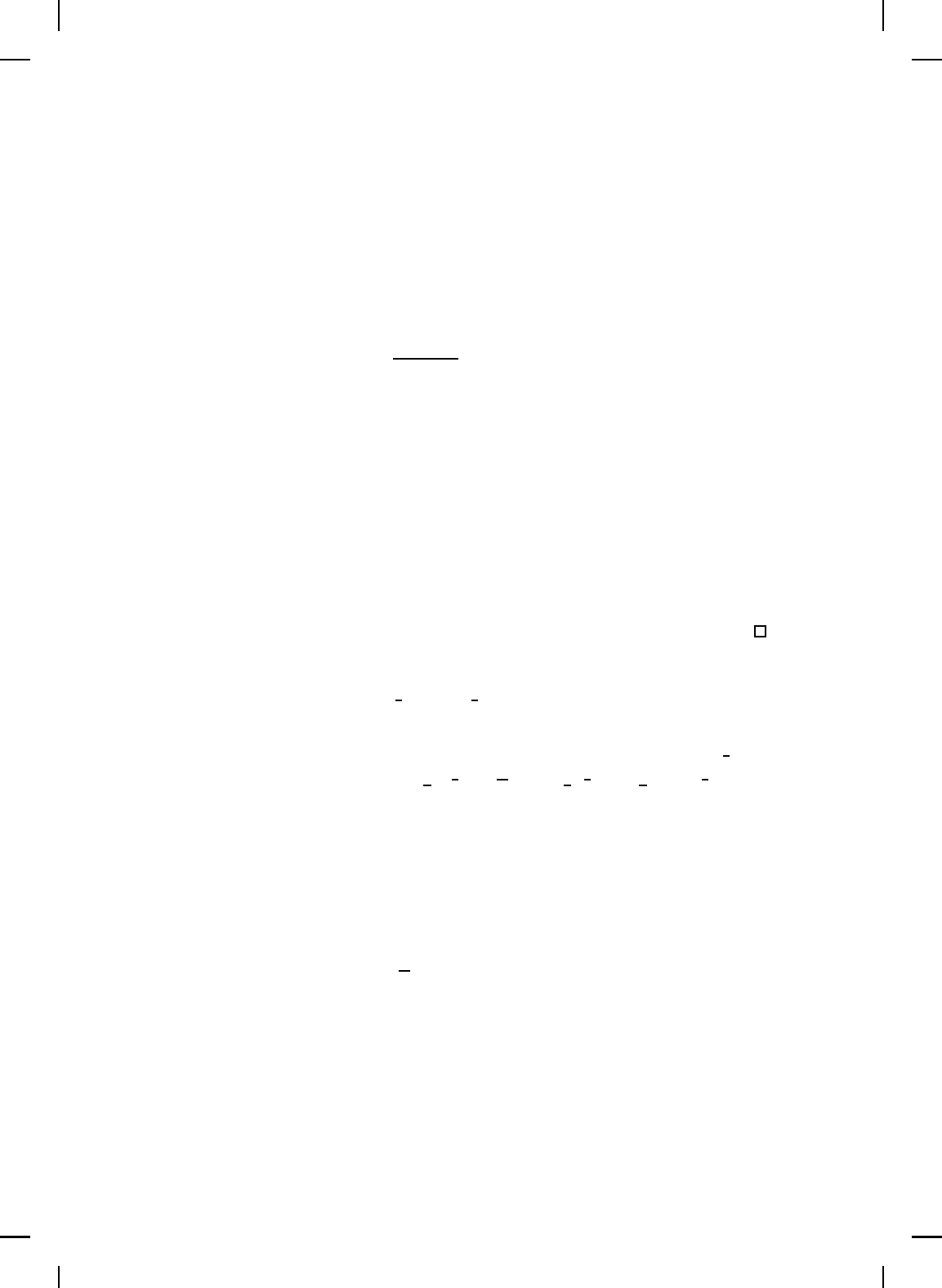
to (4.199) is globally finite-time stable. Figure 4.8 shows the state trajectory
versus time of G with x
0
= 1. △
Finally, we present a converse theorem for finite-time stability in the
case where the settling-time function is continuous. For the statement of
this result, define
˙
V (x) , lim
h→0
+
1
h
[V (s(h, x)) − V (x)], x ∈ D, (4.200)
for a given continuous function V : D → R and for every x ∈ D such th at
the limit in (4.200) exists.
Theorem 4.18. Let α ∈ (0, 1) and let N be as in Definition 4.7. If the
zero solution x(t) ≡ 0 to (4.177) is finite-time stable and the settling-time
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 259
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time
State
Figure 4.8 State trajectory versus time for Example 4.13.
function T (·) is continuous at x = 0, then there exist a continuous function
V : N → R and a scalar c > 0 such that V (0) = 0, V (x) > 0, x ∈ N, x 6= 0,
and
˙
V (x) ≤ −c(V (x))
α
, x ∈ N.
Proof. First, it follows from Proposition 4.6 that the s ettling-time
function T : N → R
+
is continuous. Next, define V : N → R
+
by
V (x) = (T (x))
1
1−α
. Note that V (·) is continuous and positive definite and,
by s(T (x) + t, x) = 0 for all x ∈ N and t ∈ R
+
,
˙
V (0) = 0. Now, (4.189)
implies that V (s
x
(t)) is continuously differentiable on [0, T (x)), and hence,
(4.200) yields
˙
V (x) = −
1
1 −α
(T (x))
α
1−α
= −
1
1 −α
(V (x))
α
. (4.201)
Hence,
˙
V (·) is continuous and negative definite on N and satisfies
˙
V (x) +
c(V (x))
α
= 0 for all x ∈ N w ith c =
1
1−α
.
4.7 Semistability of Nonlinear Dynamical Systems
In this section, we develop a stability analysis framework for systems having
a continuum of equilibria. Since every neighborhood of a nonisolated
equilibrium contains another equilibrium, a nonisolated equilibrium cannot
be asymptotically stable. Hence, asymptotic stability is not the appropriate
notion of stability for systems having a continuum of equilibria. Two

NonlinearBook10pt November 20, 2007
260 CHAPTER 4
notions that are of particular r elevance to such systems are convergence and
semistability. Convergence is the property wh ereby every system solution
converges to a limit point that may depend on the system initial cond ition.
Semistability is the additional r equ irement that all solutions converge to
limit points that are Lyapun ov stable. Semistability for an equilibriu m thus
implies Lyapunov stability, and is implied by asymptotic stability.
It is important to note that semistability is not merely equivalent to
asymptotic stability of the set of equilibria. Indeed, it is possible for a
trajectory to converge to the set of equilibria without converging to any
one equilibrium point (see Problem 4.32). Conversely, semistability does
not imply th at the equilibrium set is asymptotically stable in any accepted
sense. This is because stability of sets (see Section 4.9) is defined in terms
of distance (especially in case of noncompact sets), and it is possible to
construct examples in which the dynamical system is s emistable, but the
domain of semistability (see Definition 4.9) contains no ε-neighborhood
(defined in terms of the distance) of the (noncompact) equilibrium set, thus
ruling out asymptotic stability of the equilibrium set. Hence, semistability
and set stability of the equilibrium set are in dependent notions.
The dependen ce of the limiting state on the initial state is seen
in numerous dynamical systems including compartmental systems [220]
which arise in chemical kinetics [47], biomedical [219], environmental [338],
economic [40], power [400], and thermodynamic sys tems [167]. For these
systems, every trajectory that starts in a n eighborhood of a Lyapunov stable
equilibrium converges to a (possibly different) Lyapun ov stable equilibrium,
and hence these systems are semistable. Semistability is es pecially pertinent
to networks of dyn amic agents which exhibit convergence to a state of
consensus in which the agents agree on certain quantities of interest [208].
Semistability was first introduced in [81] for linear systems, and applied
to matrix second-order systems in [46]. References [57] and [56] consider
semistability of nonlinear systems, and give several stability results for
systems having a continuum of equilibria based on nontangency and arc
length of trajectories, respectively.
In this section, we develop necessary and sufficient conditions for
semistability. Specifically, we consider nonlinear dynamical systems G of
the form
˙x(t) = f (x(t)), x(0) = x
0
, t ∈ I
x
0
, (4.202)
where x(t) ∈ D ⊆ R
n
, t ∈ I
x
0
, is the system state vector, D is an open set,
f : D → R
n
is Lipschitz continuous on D, f
−1
(0) , {x ∈ D : f (x) = 0}
is nonempty, and I
x
0
= [0, τ
x
0
), 0 ≤ τ
x
0
≤ ∞, is the maximal interval of
existence for th e solution x(·) of (4.202). Here, we assume that for every
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 261
initial condition x
0
∈ D, (4.202) has a unique solution defined on [0, ∞),
and hence, the solutions of (4.202) define a continuous global semiflow on
D. We say that the dynamical system (4.202) is convergent with respect to
the closed set D
c
⊆ D if lim
t→∞
s(t, x) exists for every x ∈ D
c
.
The following proposition gives a sufficient cond ition f or a trajectory
of (4.202) to converge to a limit. For this result, D
c
⊆ D denotes a positively
invariant set with respect to (4.202) so that the orbit O
x
of (4.202) is
contained in D
c
for all x ∈ D
c
.
Proposition 4.7. Consider the nonlinear d ynamical system (4.202)
and let x ∈ D
c
. If the positive orbit O
+
x
of (4.202) contains a Lyapunov
stable equilibrium point y, then y = lim
t→∞
s(t, x), that is, O
+
x
= {y}.
Proof. Suppose y ∈ O
+
x
is Lyapunov stable and let N
ε
⊆ D
c
be
an open neighborhood of y. Since y is Lyapunov stable, there exists an
open neighborhood N
δ
⊂ D
c
of y such that s
t
(N
δ
) ⊆ N
ε
for every t ≥ 0.
Now, since y ∈ O
+
x
, it follows that there exists τ ≥ 0 such that s(τ, x) ∈ N
δ
.
Hence, s(t+τ, x) = s
t
(s(τ, x)) ∈ s
t
(N
δ
) ⊆ N
ε
for every t > 0. Since N
ε
⊆ D
c
is arbitrary, it follows that y = lim
t→∞
s(t, x). Thus, lim
n→∞
s(t
n
, x) = y
for every sequence {t
n
}
∞
n=1
, and hence, O
+
x
= {y}.
The following definitions and key proposition are necessary for the
main results of this section.
Definition 4.8. An equilibrium point x ∈ D of (4.202) is Lyapunov
stable if for every open subset N
ε
of D containing x, there exists an open
subset N
δ
of D containing x such that s
t
(N
δ
) ⊂ N
ε
for all t ≥ 0. An
equilibrium point x ∈ D of (4.202) is semistable if it is Lyapunov stable
and there exists an open subset Q of D containin g x such that for all
initial conditions in Q, the trajectory of (4.202) converges to a Lyapunov
stable equilibrium point, that is, lim
t→∞
s(t, x) = y, where y ∈ D is a
Lyapunov stable equ ilibr ium point of (4.202) and x ∈ Q. I f, in addition,
Q = D = R
n
, then an equilibrium point x ∈ D of (4.202) is a globally
semistable equilibrium. T he system (4.202) is said to be Lyapunov stable if
every equilibrium point of (4.202) is Lyapunov stable. The system (4.202)
is said to be semistable if every equilibrium point of (4.202) is semistable.
Finally, (4.202) is said to be globally semistable if (4.202) is s emistable and
Q = D = R
n
.
Definition 4. 9. The domain of semistability is the set of points x
0
∈ D
such that if x(t) is a solution to (4.202) with x(0) = x
0
, t ≥ 0, then x(t)
converges to a Lyapunov stable equilibr ium point in D.
Note that if (4.202) is semistable, then its domain of semistability
NonlinearBook10pt November 20, 2007
262 CHAPTER 4
contains the set of equilibria in its interior. Next, we present alternative
equivalent characterizations of semistability of (4.202).
Proposition 4.8. Consider the nonlinear dy namical system G given by
(4.202). Then the following statements are equivalent:
i) G is semistable.
ii) For each x
e
∈ f
−1
(0), there exist class K and L functions α(·) and
β(·), respectively, and δ = δ(x
e
) > 0, such that if kx
0
− x
e
k < δ, then
kx(t) −x
e
k ≤ α(kx
0
−x
e
k), t ≥ 0, and dist(x(t), f
−1
(0)) ≤ β(t), t ≥ 0.
iii) For each x
e
∈ f
−1
(0), there exist class K functions α
1
(·) and α
2
(·), a
class L function β(·), and δ = δ(x
e
) > 0, such that if kx
0
− x
e
k < δ,
then dist(x(t), f
−1
(0)) ≤ α
1
(kx(t) − x
e
k)β(t) ≤ α
2
(kx
0
− x
e
k)β(t),
t ≥ 0.
Proof. To show that i) implies ii), suppose (4.202) is semistable and
let x
e
∈ f
−1
(0). It follows from Problem 3.75 that there exists δ = δ(x
e
) > 0
and a class K fun ction α(·) such that if kx
0
− x
e
k ≤ δ, then kx(t) − x
e
k ≤
α(kx
0
− x
e
k), t ≥ 0. Without loss of generality, we may assum e that δ
is such that B
δ
(x
e
) is contained in the domain of semistability of (4.202).
Hence, for every x
0
∈ B
δ
(x
e
), lim
t→∞
x(t) = x
∗
∈ f
−1
(0) and, consequently,
lim
t→∞
dist(x(t), f
−1
(0)) = 0.
For each ε > 0 and x
0
∈ B
δ
(x
e
), define T
x
0
(ε) to be the infimum
of T with the property that dist(x(t), f
−1
(0)) < ε for all t ≥ T , that is,
T
x
0
(ε) , inf{T : dist(x(t), f
−1
(0)) < ε, t ≥ T }. For each x
0
∈ B
δ
(x
e
), th e
function T
x
0
(ε) is nonnegative and nonincreasing in ε, and T
x
0
(ε) = 0 for
sufficiently large ε.
Next, let T (ε) , sup{T
x
0
(ε) : x
0
∈ B
δ
(x
e
)}. We claim that T
is well defined. To show this, consider ε > 0 and x
0
∈ B
δ
(x
e
). Since
dist(s(t, x
0
), f
−1
(0)) < ε for every t > T
x
0
(ε), it follows from the continuity
of s that, for every η > 0, there exists an open neighborhood U of x
0
such
that dist(s(t, z), f
−1
(0)) < ε for every z ∈ U. Hence, lim sup
z→x
0
T
z
(ε) ≤
T
x
0
(ε) implying that the function x
0
7→ T
x
0
(ε) is upper semicontinuous
at the arbitrarily chosen point x
0
, and hence on B
δ
(x
e
). Since an u pper
semicontinuous function d efi ned on a compact set achieves its supremum,
it follows that T (ε) is well defined. The function T (·) is th e pointwise
supremum of a collection of nonnegative and nonincreasing functions, and
is hence nonnegative and nonincreasing. Moreover, T (ε) = 0 for every
ε > max{α(kx
0
− x
e
k) : x
0
∈ B
δ
(x
e
)}.
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 263
Let ψ(ε) ,
2
ε
R
ε
ε/2
T (σ)d σ +
1
ε
≥ T (ε) +
1
ε
. The function ψ(ε) is
positive, continuous, strictly decreasing, and ψ(ε) → 0 as ε → ∞. Choose
β(·) = ψ
−1
(·). Then β(·) is positive, continuous, strictly decreasing, and
β(σ) → 0 as σ → ∞. Furthermore, T (β(σ)) < ψ(β(σ)) = σ. Hence,
dist(x(t), f
−1
(0)) ≤ β(t), t ≥ 0.
Next, to show that ii) implies iii), suppose ii) holds and let x
e
∈
f
−1
(0). Then it follows from Problem 3.75 that x
e
is Lyapunov stable.
Choosing x
0
sufficiently close to x
e
, it follows from th e inequality kx(t) −
x
e
k ≤ α(kx
0
− x
e
k), t ≥ 0, that trajectories of (4.202) starting sufficiently
close to x
e
are bounded, and hence, the positive limit set of (4.202) is
nonempty. Since lim
t→∞
dist(x(t), f
−1
(0)) = 0, it f ollows that the positive
limit set is contained in f
−1
(0). Now, since every point in f
−1
(0) is
Lyapunov stable, it follows from Proposition 4.7 that lim
t→∞
x(t) = x
∗
,
where x
∗
∈ f
−1
(0) is Lyapunov stable. If x
∗
= x
e
, then it follows using
similar arguments as above that there exists a class L f unction
ˆ
β(·) such that
dist(x(t), f
−1
(0)) ≤ kx(t) −x
e
k ≤
ˆ
β(t) f or every x
0
satisfying kx
0
−x
e
k < δ
and t ≥ 0. Hence, dist(x(t), f
−1
(0)) ≤
p
kx(t) − x
e
k
q
ˆ
β(t), t ≥ 0. Next,
consider the case where x
∗
6= x
e
and let α
1
(·) be a class K function. In this
case, note that lim
t→∞
dist(x(t), f
−1
(0))/α
1
(kx(t) −x
e
k) = 0, and hence, it
follows us ing similar arguments as above that there exists a class L function
β(·) such that dist(x(t), f
−1
(0)) ≤ α
1
(kx(t) − x
e
k)β(t), t ≥ 0. Finally,
note that α
1
◦ α is of class K (by Problem 3.71), and hence, iii) follows
immediately.
Finally, to show that iii) implies i), suppose iii) holds and let x
e
∈
f
−1
(0). Then it follows that α
1
(kx(t) − x
e
k) ≤ α
2
(kx(0) − x
e
k), t ≥ 0, that
is, kx(t) −x
e
k ≤ α(kx(0) −x
e
k), where t ≥ 0 and α = α
−1
1
◦α
2
is of class K
(by Problem 3.71). It now f ollows from Problem 3.75 that x
e
is Lyapunov
stable. Since x
e
was chosen arbitrarily, it follows that every equilibrium point
is Lyapunov stable. Furthermore, lim
t→∞
dist(x(t), f
−1
(0)) = 0. Choosing
x
0
sufficiently close to x
e
, it follows from the inequality kx(t)−x
e
k ≤ α(kx
0
−
x
e
k), t ≥ 0, that trajectories of (4.202) starting sufficiently close to x
e
are
bounded, and hence, the positive limit set of (4.202) is nonempty. Since
every point in f
−1
(0) is Lyapunov stable, it follows from Proposition 4.7
that lim
t→∞
x(t) = x
∗
, where x
∗
∈ f
−1
(0) is Lyapunov stable. Hence, by
definition, (4.202) is semistable.
Next, we present a su fficient condition for semistability.
Theorem 4.19. Consider the nonlinear dynamical system (4.202). Let
Q be an open neighborhood of f
−1
(0) and assume that there exists a
NonlinearBook10pt November 20, 2007
264 CHAPTER 4
continuously differentiable function V : Q → R such that
V
′
(x)f(x) < 0, x ∈ Q\f
−1
(0). (4.203)
If (4.202) is Lyapunov stable, then (4.202) is semistable.
Proof. Since (4.202) is Lyapunov stable by assumption, for every
z ∈ f
−1
(0), there exists an open neighborhood V
z
of z such that s([0, ∞) ×
V
z
) is bounded an d contained in Q. The set V ,
S
z∈f
−1
(0)
V
z
is an open
neighborhood of f
−1
(0) contained in Q. Consider x ∈ V so that there
exists z ∈ f
−1
(0) such that x ∈ V
z
and s(t, x) ∈ V
z
, t ≥ 0. Since V
z
is
bounded it follows that the positive limit set of x is nonempty and invariant.
Furth ermore, it follows f rom (4.203) that
˙
V (s(t, x)) ≤ 0, t ≥ 0, and hence,
it follows from Theorem 3.3 that s(t, x) → M as t → ∞, where M is the
largest invariant set contained in the set R = {y ∈ V
z
: V
′
(y)f(y) = 0}.
Note that R = f
−1
(0) is invariant, and hence, M = R, which implies
that lim
t→∞
dist(s(t, x), f
−1
(0)) = 0. Finally, since every point in f
−1
(0) is
Lyapunov stable, it follows from Proposition 4.7 that lim
t→∞
s(t, x) = x
∗
,
where x
∗
∈ f
−1
(0) is Lyapunov stable. Hence, by definition, (4.202) is
semistable.
Next, we present a slightly more general theorem for s emistability
wherein we do not assume that all points in
˙
V
−1
(0) are Lyapunov stable but
rather we assume that all points in the largest invariant su bset of
˙
V
−1
(0)
are Lyapunov stable.
Theorem 4.20. Consider the nonlinear d ynamical system (4.202) and
let Q be an open neighborh ood of f
−1
(0). Sup pose the orbit O
x
of (4.202)
is bounded for all x ∈ Q and assume that there exists a continuously
differentiable function V : Q → R such that
V
′
(x)f(x) ≤ 0, x ∈ Q. (4.204)
If every point in the largest invariant subset M of {x ∈ Q : V
′
(x)f(x) = 0}
is Lyapunov stable, then (4.202) is semistable.
Proof. Since every solution of (4.202) is bounded, it follows from
the hypotheses on V (·) that, for every x ∈ Q, the positive limit set ω(x)
of (4.202) is nonempty and contained in the largest invariant subset M
of {x ∈ Q : V
′
(x)f(x) = 0}. Sin ce every point in M is a Lyapunov s table
equilibrium, it follows from P roposition 4.7 th at ω(x) contains a single point
for every x ∈ Q and lim
t→∞
s(t, x) exists for every x ∈ Q. Now, since
lim
t→∞
s(t, x) ∈ M is Lyapunov stable for every x ∈ Q, semistability is
immediate.