Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.

NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 285
holds. Then it follows that x(t) ∈ O
1
, t ≥ 0, and hence, it follows from
Theorem 2.41 that the positive limit set ω(x
0
) of x(t), t ≥ 0, is a nonempty,
compact, invariant, and connected set. Furthermore, x(t) → ω(x
0
) as t →
∞. Now, since V (x(t)), t ≥ 0, is non increasing and bounded from below by
zero it follows that β
△
= lim
t→∞
V (x(t)) ≥ 0 is well defined. Furthermore,
since V (·) is lower s emicontinuous it can be shown that V (y) ≤ β, y ∈ ω(x
0
),
and hence, since V (·) is nonnegative, β = 0 if and only if ω(x
0
) = D
0
or,
equivalently, x(t) → D
0
as t → ∞. Now, sup pose, ad absurdum, that
x(t), t ≥ 0, does not converge to D
0
or, equivalently, β > 0. Furthermore,
let y ∈ ω(x
0
) and let {τ
n
}
∞
n=0
be an increasing unbounded sequence such that
lim
n→∞
x(τ
n
) = y. Since {V (x(τ
n
))}
∞
n=0
is a lower bounded nonincreasing
sequence, lim
n→∞
V (x(τ
n
)) exists and is equal to β. Hence, y 6∈ D
0
and
since y ∈ ω(x
0
) is arbitrary, it follows that ω(x
0
) ∩ D
0
= Ø. Next, let
γ
△
= min
x∈ω(x
0
)
V (x) > 0 and let x
γ
∈ ω(x
0
) be such that V (x
γ
) = γ.
Now, since ω(x
0
) is an invariant set it follows that for all x(0) ∈ ω(x
0
),
x(t) ∈ ω(x
0
), t ≥ 0, and hence, V (x(t)) ≥ γ, t ≥ 0. However, since for all
x(0) ∈ D, x(0) 6∈ D
0
, there exists an increasing unbounded sequence {t
n
}
∞
n=1
such that (4.256) holds, it follows that if x(0) = x
γ
∈ ω(x
0
), there exists
t > 0 s uch that V (x(t)) < V (x(0)) = γ, which is a contradiction. Hence,
ω(x
0
) ⊆ D
0
and x(t) → D
0
as t → ∞, establishing asymptotic stability.
Note that in the case where the function V (·) is continuously
differentiable on D in Theorem 4.29, it follows that V (x(t)) ≤ V (x(τ)), for
all t ≥ τ ≥ 0, is equivalent to
˙
V (x)
△
= V
′
(x)f(x) ≤ 0, x ∈ D. Furthermore,
if
˙
V (x) = V
′
(x)f(x) < 0, x ∈ D, x 6∈ D
0
, then every increasing unbounded
sequence {t
n
}
∞
n=0
, with t
0
= 0, is su ch that V (x(t
n+1
)) < V (x(t
n
)), n =
0, 1, . . .. Hence, the following corollary to Theorem 4.29 is immediate.
Corollary 4.7. Consider the nonlinear dynamical system (4.251) and
let D
0
be a compact positively invariant set with respect to (4.251) such th at
D
0
⊂ D. Assume that there exists a continuously differentiable function
V : D → R such that
V (x) = 0, x ∈ D
0
, (4.257)
V (x) > 0, x ∈ D, x 6∈ D
0
, (4.258)
V
′
(x)f(x) ≤ 0, x ∈ D. (4.259)
Then D
0
is Lyapunov stable. I f, in addition,
V
′
(x)f(x) < 0, x ∈ D, x 6∈ D
0
, (4.260)
then D
0
is asymptotically stable.
The following theorem provides a converse to Theorem 4.29. For this
result defin e the notation D
r
△
= {x ∈ D : dist(x, D
0
) < r}, r > 0, to denote
an r open neighborhood of D
0
.

NonlinearBook10pt November 20, 2007
286 CHAPTER 4
Theorem 4.30. Consider the nonlinear dynamical system (4.251). If
D
0
is Lyapunov stable, then there exist D
a
⊆ D and a lower semicontinuous,
positive-definite (on D
a
\D
0
) function V : D
a
→ R such that D
0
⊂
◦
D
a
, V (·)
is continuous on D
0
, and
V (s(t, x)) ≤ V (s(τ, x)), 0 ≤ τ ≤ t, x ∈ D
a
. (4.261)
If D
0
is asymptotically stable, then there exists a continuous, positive-
definite function V : D
a
→ R such that inequality (4.261) is strictly satisfied.
Proof. Let ε > 0. Since D
0
is Lyapunov stable it follows that there
exists δ = δ(ε) > 0 such that if x
0
∈ D
δ
, then s(t, x
0
) ∈ D
ε
, t ≥ 0. Now,
let D
a
△
= {y ∈ D
ε
: there exists t ≥ 0 and x
0
∈ D
δ
such that y = s(t, x
0
)}.
Note that D
a
⊆ D
ε
, D
a
is a positively invariant set, and D
δ
⊆ D
a
. Hence,
D
0
⊂
◦
D
a
. Next, define V (x)
△
= sup
t≥0
dist(s(t, x), D
0
), x ∈ D
a
, and since D
a
is positively invariant and bounded it follows that V (·) is well defined on D
a
.
Now, since D
0
is invariant, x ∈ D
0
implies V (x) = 0, x ∈ D
0
. Furth ermore,
V (x) ≥ dist(s(0, x), D
0
) > 0, x ∈ D
a
, x 6∈ D
0
.
Next, since f (·) in (4.251) is such that for every x ∈ D
a
, s(t, x), t ≥ 0,
is the unique solution to (4.251), it follows that s(t, x) = s(t−τ, s(τ, x)), 0 ≤
τ ≤ t. Hence, f or every t, τ ≥ 0, such th at t ≥ τ ,
V (s(τ, x)) = sup
θ≥0
dist(s(θ, s(τ, x)), D
0
)
= sup
θ≥0
dist(s(τ + θ, x), D
0
)
≥ sup
θ≥t−τ
dist(s(τ + θ, x), D
0
)
= sup
θ≥t−τ
dist(s(θ − (t − τ), s(t, x)), D
0
)
= sup
θ≥0
dist(s(θ, s(t, x)), D
0
)
= V (s(t, x)), (4.262)
which proves (4.261). Next, let p
D
0
∈ D
0
. Since D
0
is Lyapunov stable
it follows that for every ˆε > 0 there exists
ˆ
δ =
ˆ
δ(ε) > 0 such that if
x
0
∈ B
ˆ
δ
(p
D
0
), then s(t, x
0
) ∈ D
ˆε/2
, t ≥ 0, which implies that V (x
0
) =
sup
t≥0
dist(s(t, x
0
), D
0
) ≤
ˆε
2
. Hence, for every point p
D
0
∈ D
0
and ˆε > 0
there exists
ˆ
δ =
ˆ
δ(ˆε) such that if x
0
∈ B
ˆ
δ
(p
D
0
), th en V (x
0
) < ˆε, establishing
that V (·) is continuous on D
0
.
Finally, to show that V (·) is lower semicontinuous everywhere on D
a
,
let x ∈ D
a
, let ˆε > 0, and note that since V (x)
△
= sup
t≥0
dist(s(t, x), D
0
),
there exists T = T (x, ˆε) > 0 such that V (x) − dist(s(T, x), D
0
) < ˆε. Now,
consider a sequence {x
i
}
∞
i=1
∈ D
a
such that x
i
→ x as i → ∞. Next, since
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 287
s(t, ·) is continuous for every t ≥ 0 and dist(·, D
0
) : D
a
→ R is continuous,
it f ollows that dist(s(T, x), D
0
) = lim
i→∞
dist(s(T, x
i
), D
0
). Next, note that
dist(s(T, x
i
), D
0
) ≤ sup
t≥0
dist(s(t, x
0
), D
0
), i = 1, 2, . . ., and hence,
lim inf
i→∞
sup
t≥0
dist(s(t, x
i
), D
0
) ≥ lim inf
i→∞
dist(s(T, x
i
), D
0
)
= lim
i→∞
dist(s(T, x
i
), D
0
), i = 1, 2, . . . ,
which implies that
V (x) < dist(s(T, x), D
0
) + ˆε
= lim
i→∞
dist(s(T, x
i
), D
0
) + ˆε
≤ lim inf
i→∞
sup
t≥0
dist(s(t, x
i
), D
0
) + ˆε
= lim inf
i→∞
V (x
i
) + ˆε. (4.263)
Now, since ˆε > 0 is arbitrary, (4.263) implies that V (x) ≤ lim inf
i→∞
V (x
i
).
Thus , since {x
i
}
∞
i=1
is an arbitrary sequence converging to x, it follows that
V (·) is lower semicontinuous on D
a
.
To show the existence of a continuous, positive-definite, strictly
decreasing function along th e system trajectories of (4.251) in the case where
D
0
is asymptotically stable, consider the function V : D
A
→ R given by
V (x)
△
=
Z
∞
0
sup
t≥0
dist(s(t, s(σ, x)), D
0
)e
−σ
dσ, x ∈ D
A
, (4.264)
where D
A
⊆ D
a
is a domain of attraction of D
0
. Since D
0
is asymptotically
stable, it follows that
ˆ
V (x)
△
= sup
t≥0
dist(s(t, x), D
0
), x ∈ D
A
, is continuous
on D
A
(see [58, p. 67]), which implies that V (·) is continuous on D
A
and
positive definite on D
A
\ D
0
. Next, sup pose, ad absurdum, that
V (s(t, x)) = V (s(τ, x)), (4.265)
for some 0 ≤ τ < t and x ∈ D
A
. Now, since
ˆ
V (·) is positive definite (on
D
a
\ D
0
) and (4.261) holds for
ˆ
V (·), (4.265) implies that
ˆ
V (s(σ + t, x)) =
ˆ
V (s(σ + τ, x)) for all σ ≥ 0. However, since D
0
is asymptotically stable
it follows that dist(s(t, x), D
0
) → 0 as t → ∞ for x ∈ D
A
, and h en ce, for
sufficiently large σ
∗
> 0, dist(s(σ
∗
+t, x), D
0
) < dist(s(σ
∗
+τ, x), D
0
). Thus,
ˆ
V (s(σ
∗
+ t, x)) <
ˆ
V (s(σ
∗
+ τ, x)), which leads to a contradiction. Hence,
inequality (4.261) is strictly satisfied f or V (·) which completes the proof.
Next, we generalize the Barbashin-Krasovskii-LaSalle invariant set
theorems to the case in which the function V (·) is lower semicontinuous.
In particular, we show that the system trajectories converge to a union of
largest invariant sets contained on the bou ndary of the intersections over
finite intervals of the closure of generalized Lyapunov level surfaces. For the
NonlinearBook10pt November 20, 2007
288 CHAPTER 4
remainder of the results of this section define the n otation
R
γ
△
=
\
c>γ
V
−1
([γ, c]), (4.266)
for arbitrary V : D ⊆ R
n
→ R and γ ∈ R, and let M
γ
denote the largest
invariant set (with respect to (4.251)) contained in R
γ
.
Theorem 4.31. Consider the nonlinear dynamical system (4.251), let
D
c
and D
0
be compact positively invariant sets with respect to (4.251) such
that D
0
⊂ D
c
⊂ D, and let x(t), t ≥ 0, denote the solution to (4.251)
corresponding to x
0
∈ D
c
. Assume that there exists a lower semicontinuous
function V : D
c
→ R such that
V (x) = 0, x ∈ D
0
, (4.267)
V (x) > 0, x ∈ D
c
, x 6∈ D
0
, (4.268)
V (x(t)) ≤ V (x(τ)), 0 ≤ τ ≤ t. (4.269)
Furth ermore, assum e that for all x
0
∈ D
c
, x
0
6∈ D
0
, th ere exists an increasing
unbounded sequence {t
n
}
∞
n=0
, with t
0
= 0, such th at
V (x(t
n+1
)) < V (x(t
n
)), n = 0, 1, . . . . (4.270)
Then, either M
γ
⊂
ˆ
R
γ
△
= R
γ
\ V
−1
(γ), or M
γ
= Ø, γ > 0. Furthermore,
if x
0
∈ D
c
, then x(t) →
ˆ
M
△
= ∪
γ∈G
M
γ
as t → ∞, where G
△
= {γ ≥ 0 :
R
γ
∩ D
0
6= Ø}. If, in addition, D
0
⊂
◦
D
c
and V (·) is continuous on D
0
,
then D
0
is locally asymptotically stable and D
c
is a subset of the domain of
attraction.
Proof. Sin ce D
c
is a compact positively invariant s et, it follows that for
all x
0
∈ D
c
, the forward solution x(t), t ≥ 0, to (4.251) is bounded. Hence,
it follows from Theorem 2.41 that, for all x
0
∈ D
c
, ω(x
0
) is a nonempty,
compact, connected invariant set. Next, it follows from Theorem 4.24 and
the fact that V (·) is positive definite (with respect to D
c
\ D
0
), that for
every x
0
∈ D
c
there exists γ
x
0
≥ 0 such that ω(x
0
) ⊆ M
γ
x
0
⊆ R
γ
x
0
. Now,
given x(0) ∈ V
−1
(γ
x
0
), γ
x
0
> 0, (4.270) implies that there exists t
1
> 0
such that V (x(t
1
)) < γ
x
0
and x(t
1
) 6∈ V
−1
(γ
x
0
). Hence, V
−1
(γ
x
0
) ⊂ R
γ
x
0
does not contain any invariant set. Alternatively, if x(0) ∈
ˆ
R
γ
x
0
, then
V (x(0)) < γ
x
0
and (4.270) implies that x(t) 6∈ V
−1
(γ
x
0
), t ≥ 0. Hence,
any invariant set contained in R
γ
x
0
is a subset of
ˆ
R
γ
x
0
, w hich implies that
M
γ
x
0
⊂
ˆ
R
γ
x
0
, γ
x
0
> 0. If ˆγ > 0 is such that ˆγ 6= γ
x
0
for all x
0
∈ D
c
,
then there does not exist x
0
∈ D
c
such that ω(x
0
) ⊆ R
ˆγ
, and hence, M
ˆγ
=
Ø. Now, ad absurdum, suppose D
0
∩ ω(x
0
) = Ø. Since V (·) is lower
semicontinuous it follows from Theorem 2.11 that there exists ˆx ∈ ω(x
0
)
such that α = V (ˆx) ≤ V (x), x ∈ ω(x
0
). Now, with x(0) = ˆx 6∈ D
0
it follows
from (4.270) that there exists an increasing unbounded sequence {t
n
}
∞
n=0
,
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 289
with t
0
= 0, such that V (x(t
n+1
)) < V (x(t
n
)), n = 0, 1, . . ., which implies
that there exists t > 0 such that V (x(t)) < α, and hence, x(t) 6∈ ω(x
0
),
contradicting the fact that ω(x
0
) is an invariant set. Hence, there exists
q ∈ D
0
such that q ∈ ω(x
0
) ⊆ R
γ
x
0
, which implies that R
γ
x
0
∩ D
0
6= Ø.
Thus , γ
x
0
∈ G for all x
0
∈ D
c
, which further implies that ω(x
0
) ⊆
ˆ
M. Now,
since x(t) → ω(x
0
) ⊆
ˆ
M as t → ∞ it follows that x(t) →
ˆ
M as t → ∞.
If V (·) is continuous on D
0
⊂
◦
D
c
, then Lyapunov stability of the com-
pact positively invariant set D
0
follows from Theorem 4.29. Furthermore,
from the continuity of V (·) on D
0
and the fact that V (x) = 0 for all x ∈ D
0
,
it follows th at G = {0} and
ˆ
M ≡ M
0
. Hence, ω(x
0
) ⊆ D
0
for all x
0
∈ D
c
,
establishing local asymptotic stability of the compact positively invariant
set D
0
of (4.251) with a subset of the domain of attraction given by D
c
.
Finally, we present a generalized global invariant set theorem for
guaranteeing global attraction and global asymptotic stability of a compact
positively invariant set of a nonlinear dynamical system.
Theorem 4.32. Consider the nonlinear dynamical system (4.251) with
D = R
n
and let x(t), t ≥ 0, denote the solution to (4.251) corresponding
to x
0
∈ R
n
. Assume that there exists a compact positively invariant set D
0
with respect to (4.251) and a lower semicontinuous function V : R
n
→ R
such that
V (x) = 0, x ∈ D
0
, (4.271)
V (x) > 0, x ∈ R
n
, x 6∈ D
0
, (4.272)
V (x(t)) ≤ V (x(τ)), 0 ≤ τ ≤ t, (4.273)
V (x) → ∞ as kxk → ∞. (4.274)
Then for all x
0
∈ R
n
, x(t) → M
△
= ∪
γ≥0
M
γ
, as t → ∞. If, in addition,
for all x
0
∈ R
n
, x
0
6∈ D
0
, there exists an increasing unbounded sequence
{t
n
}
∞
n=0
, with t
0
= 0, such th at
V (x(t
n+1
)) < V (x(t
n
)), n = 0, 1, . . . , (4.275)
then, either M
γ
⊂
ˆ
R
γ
△
= R
γ
\ V
−1
(γ), or M
γ
= Ø, γ > 0. Furthermore,
x(t) →
ˆ
M
△
= ∪
γ∈G
M
γ
as t → ∞, where G
△
= {γ ≥ 0 : R
γ
∩ D
0
6= Ø}.
Finally, if V (·) is continuous on D
0
then the compact positively invariant
set D
0
of (4.251) is globally asymptotically stable.
Proof. Note that since V (x) → ∞ as kxk → ∞ it follows that for every
β > 0 there exists r > 0 such that V (x) > β for all kxk> r or, equivalently,
V
−1
([0, β]) ⊆ {x : kxk ≤ r}, which implies that V
−1
([0, β]) is bounded for
all β > 0. Hence, for all x
0
∈ R
n
, V
−1
([0, β
x
0
]) is bounded, where β
x
0
△
=
NonlinearBook10pt November 20, 2007
290 CHAPTER 4
V (x
0
). Furthermore, since V (·) is a positive-definite lower semicontinuous
function, it follows that V
−1
([0, β
x
0
]) is closed an d, s ince V (x(t)), t ≥ 0, is
nonincreasing, V
−1
([0, β
x
0
]) is positively invariant. Hence, for every x
0
∈
R
n
, V
−1
([0, β
x
0
]) is a compact positively invariant set. Now, with D
c
=
V
−1
([0, β
x
0
]) it f ollows from Theorem 4.24 that there exists γ
x
0
∈ [0, β
x
0
]
such that ω(x
0
) ⊆ M
γ
x
0
⊂
ˆ
R
γ
x
0
, which implies that x(t) → M as t → ∞.
If, in addition, for all x
0
∈ R
n
, x
0
6∈ D
0
, there exists an increasing unbounded
sequence {t
n
}
∞
n=0
, with t
0
= 0, such that (4.275) holds, then it follows from
Theorem 4.31 that x(t) →
ˆ
M as t → ∞.
Finally, if V (·) is continuous on D
0
then Lyapunov stability follows as
in the proof of Theorem 4.31. Fu rthermore, in this case, G = {0}, which
implies that
ˆ
M = M
0
. Hence, ω(x
0
) ⊆ D
0
, establishing global asymptotic
stability of the compact positively invariant set D
0
of (4.251).
4.10 Poincar´e Maps and S tability of Periodic Orbits
Poincar´e’s theorem [358] provides a powerful tool in analyzing the stability
properties of periodic orbits and limit cycles of n-dimensional dynamical
systems in the case where the trajectory of the system can be relatively easily
integrated. Specifically, Poincar´e’s theorem provides necessary and sufficient
conditions for stability of periodic orbits based on the stability properties of a
fixed point of a discrete-time dynamical system constructed from a Poincar´e
return map. In particular, for a given candidate periodic trajectory, an (n −
1)-dimensional hyperplane is constructed that is transversal to the periodic
trajectory and which defines th e Poincar´e return map. Trajectories starting
on the hyperplane which are sufficiently close to a point on the periodic
orbit will intersect the hyp erplane after a time approximately equal to the
period of the periodic orbit. This mapping traces the system trajectory
from a point on the hyperplane to its next corresponding intersection with
the hyperplane. Hence, the Poincar´e retur n map can be used to establish
a relationship between the stability properties of a dynamical sys tem with
periodic solutions and the stability properties of an equilibrium point of
an (n − 1)-dimensional discrete-time system. In this section, using the
notions of Lyapunov and asymptotic stability of sets developed in S ection
4.9, we construct lower semicontinuous Lyapunov functions to provide a
Lyapunov f unction proof of Poincar´e’s th eorem. To begin, we introduce
the notions of Lyapunov and asymptotic stability of a periodic orbit of the
nonlinear dynamical system (4.251). For this definition recall the definitions
of periodic solutions and periodic orbits of (4.251) given in Definition 2.53.
Definition 4.12. A periodic orbit O of (4.251) is Lyapunov stable if,
for all ε > 0, there exists δ = δ(ε) > 0 such that if dist(x
0
, O) < δ, then
dist(s(t, x
0
), O) < ε, t ≥ 0. A periodic orbit O of (4.251) is asymptotically

NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 291
stable if it is Lyapunov stable and there exists δ > 0 such that if dist(x
0
, O) <
δ, then dist(s(t, x
0
), O) → 0 as t → ∞.
To proceed, we assume that for the point p ∈ D, the dynamical system
(4.251) has a periodic solution s(t, p), t ≥ 0, with period T > 0 that generates
the periodic orbit O
△
= {x ∈ D : x = s(t, p), 0 ≤ t ≤ T }. Note th at
O is a compact invariant set. Fur th ermore, we assume that there exists
a continuously differentiable function X : D → R such that the (n − 1)-
dimensional hyperplane defined by H
△
= {x ∈ D : X(x) = 0} contains the
point x = p and X
′
(p) 6= 0. In addition, we assume that the hyperplane
H is not tangent to the periodic orbit O at x = p, that is, X
′
(p)f(p) 6= 0.
Next, define the local section S ⊂ H such that p ∈ S, X
′
(x) 6= 0, x ∈ S, and
no trajectory of (4.251) starting in S is tangent to H, that is, X
′
(x)f(x) 6=
0, x ∈ S. Note that a trajectory s(t, p) will intersect S at p in T seconds.
Furth ermore, let
U
△
= {x ∈ S : there exists ˆτ > 0 such that s(ˆτ , x) ∈ S
and s(t, x) 6∈ S, 0 < t < ˆτ}, (4.276)
and let τ : U → R
+
be defined by
τ(x)
△
= {ˆτ > 0 : s(ˆτ, x) ∈ S and s(t, x) 6∈ S, 0 < t < ˆτ}. (4.277)
Finally, define the Poincar´e return map P : U → S by
P (x)
△
= s(τ (x), x), x ∈ U. (4.278)
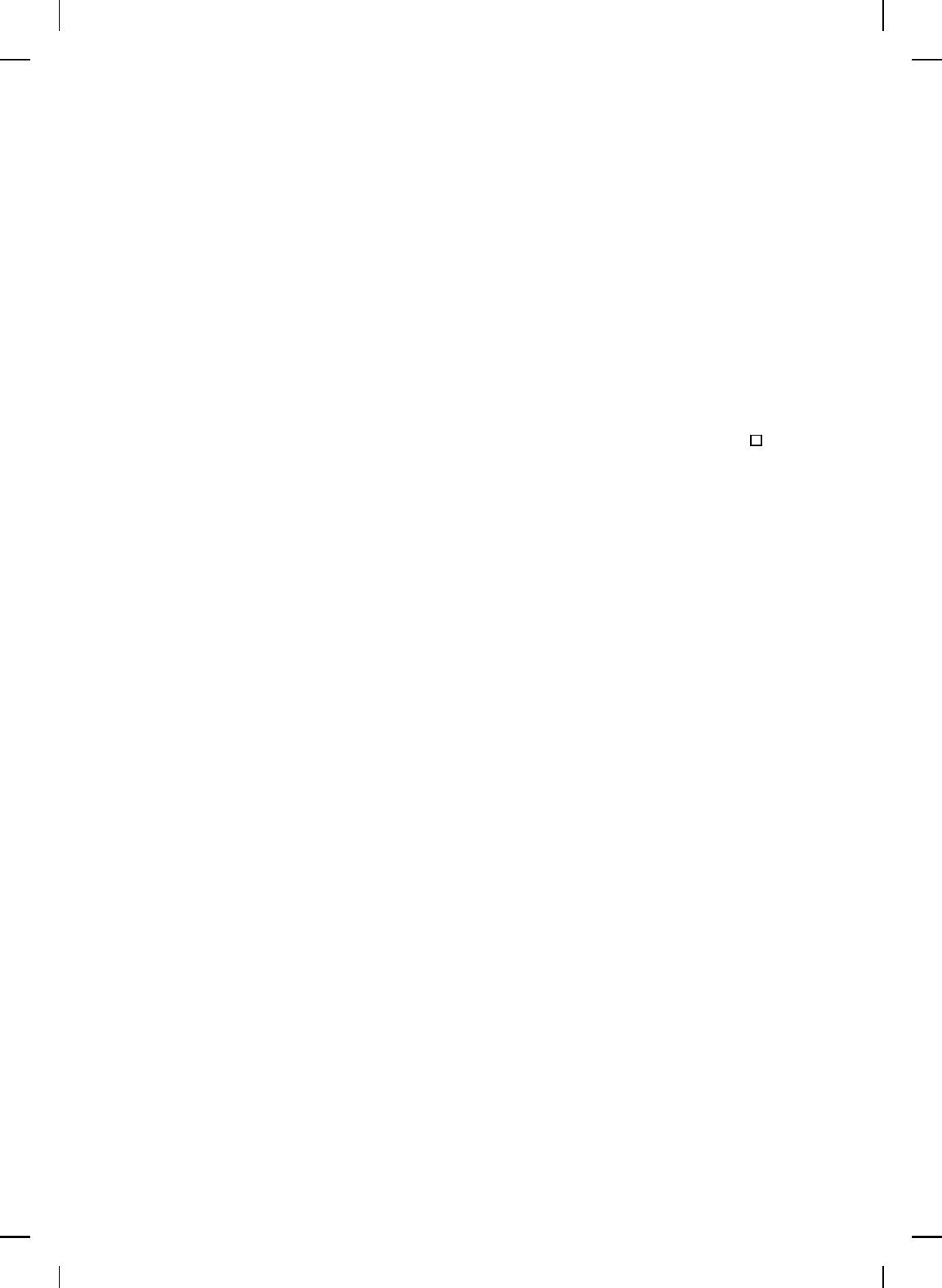
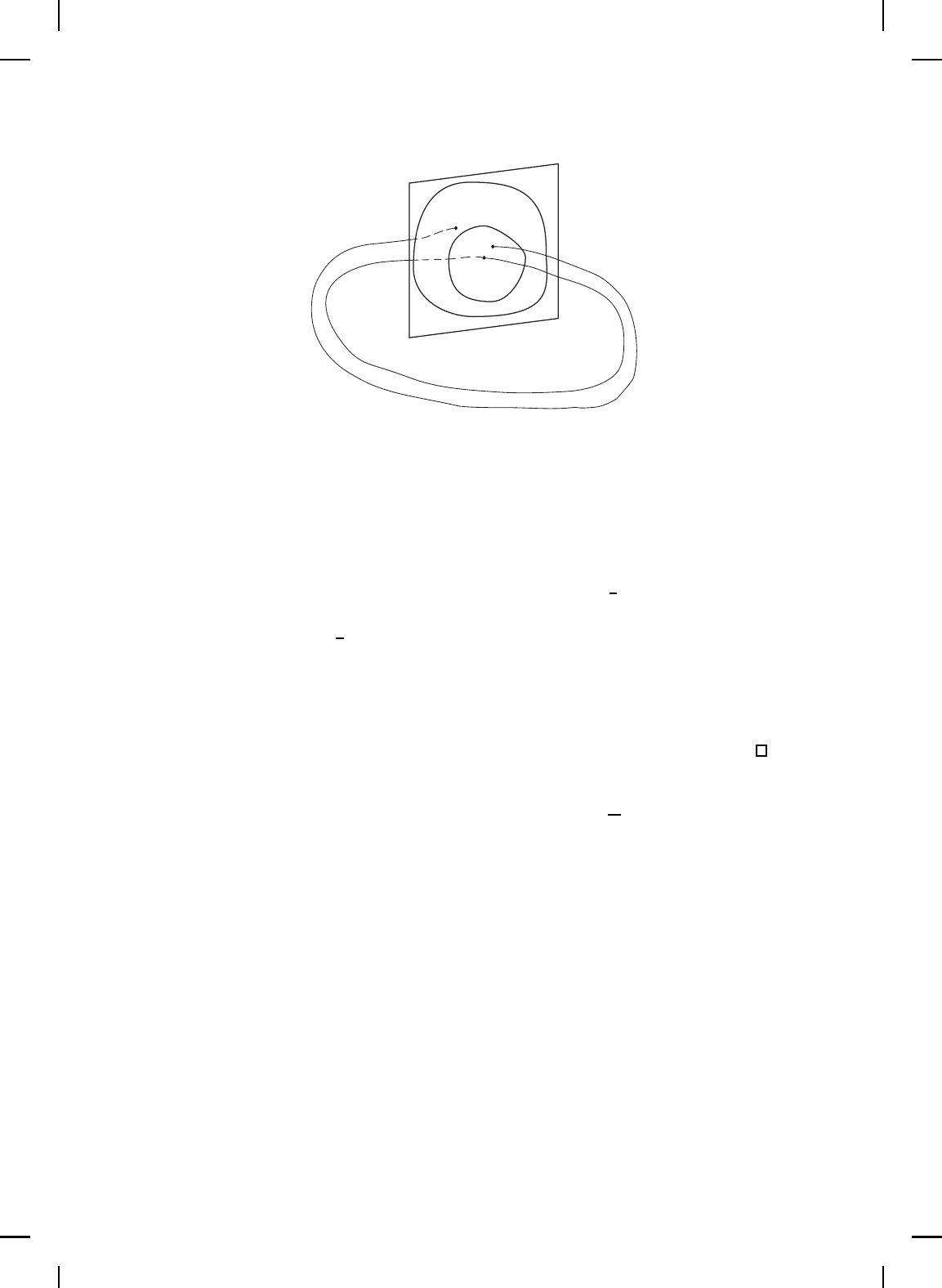
Figure 4.9 gives a visualization of the Poincar´e retur n map construction.
Next, define D
1
△
= {x ∈ D : there exists τ(x) > 0 such that s(τ(x),
x) ∈ S} and note that, for every x ∈ O, there exists δ = δ(x) > 0 such
that B
δ
(x) ⊂ D
1
, and hence, O ⊂
◦
D
1
. S imilarly, define O
α
△
= {x ∈ D
1
:
s(τ(x), x) ∈ S
α
} and U
α
△
= {x ∈ S
α
: s(τ(x), x) ∈ S
α
}, where S
α
△
= B
α
(p)∩S,
α > 0, and O ⊂
◦
O
α
⊆ D
1
. T he function τ : D
1
→ R
+
defines the minimum
time required for the trajectory s(t, x), x ∈ D
1
, to return to the local section
S. Note that τ (x) > 0, x ∈ U. The following lemma shows that τ (·) is
continuous on
◦
D
1
\H.
Lemma 4.4. Consider the nonlinear dynamical system (4.251). As-
sume that the point p ∈ D
1
generates the periodic orbit O
△
= {x ∈ D
1
: x =
s(t, p), 0 ≤ t ≤ T }, where s(t, p), t ≥ 0, is the periodic solution with period
T ≡ τ(p). Then the function τ :
◦
D
1
→ R
+
is continuous on
◦
D
1
\H.
Proof. Let ε > 0 and x ∈
◦
D
1
\H. Note that x
∗
△
= s(τ(x), x) ∈ S, and
hence, X
′
(x
∗
) 6= 0 and X
′
(x
∗
)f(x
∗
) 6= 0. Now, since s(·, x) is continuous in
NonlinearBook10pt November 20, 2007
292 CHAPTER 4
p
x
P (x)
U
S
H
Figure 4.9 Visualization of the Poincar´e return map.
t, [0, t
1
] is a compact interval it follows from the d efi nition of τ(·) that there
exists
ˆ
t > 0 such that for every t
1
∈ (
ˆ
t, τ(x)),
σ(t
1
)
△
= inf
0≤t≤t
1
dist(s(t, x), S) > 0. (4.279)
Next, for sufficiently small ˆε > 0, define t
2
△
= τ(x) +
ˆε
2
and x
2
△
= s(t
2
, x).
Since X
′
(x
∗
) 6= 0 and X
′
(x
∗
)f(x
∗
) 6= 0, it follows that dist(x
2
, S) > 0. Now,
define t
1
△
= τ(x) −
ˆε
2
. Then it follows from the continuous dependence of
solutions to (4.251) in time and initial data that there exists δ > 0 such
that for all y ∈ B
δ
(x), sup
ˆ
t
≤t≤t
2
ks(t, y) − s(t, x)k < min{dist(x
2
, S), σ(t
1
)}.
Hence, for all y ∈ B
δ
(x), it follows that t
1
< τ(y) < t
2
. Now, taking
ˆε < ε, it follows that |τ(y) −τ (x)| < ε, establishing the continuity of τ(·) at
x ∈
◦
D
1
\H.
Finally, define the discrete-time dynamical system given by
z(k + 1) = P (z(k)), z(0) ∈ U, k ∈ Z
+
. (4.280)
Clearly x = p is a fixed point of (4.280) since T = τ(p), an d h en ce, p = P (p).
Since Poincar´e’s theorem provides necessary and sufficient conditions for
stability of periodic orbits based on the stability properties of a fixed
point of the discrete-time dynamical sy s tem (4.280), stability notions of
discrete-time systems are required. Chapter 13 develops stability theory
for discrete-time s y s tems. Rather than embarking on a lengthy discussion
of discrete-time stability theory, here we give two key necessary results
for developing Poincar´e’s theorem. For th ese results, the definitions of
Lyapunov and asymptotic stability of a discrete-time system are analogous
to their continuous-time counterparts and are given in Chapter 13 (see
Definition 13.1). First, we note that if ρ(P
′
(z(p))) < 1, where ρ(·)
denotes the spectral radius, then the fixed point x = p of th e nonlinear

NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 293
discrete-time dynamical system (4.280) is asymptotically stable. This is
Lyapunov’s indirect method for nonlinear discrete-time systems. For d etails,
see Problem 13.10. Second, the following theorem is a direct application of
the standard discrete-time Lyapunov stability theorem (see Theorems 13.2
and 13.6) for general nonlinear dynamical systems to the dynamical system
(4.280).
Theorem 4.33. The equilibrium solution z(k) ≡ p to (4.280) is
Lyapunov (respectively, asymptotically) stable if and only if there exist
a scalar α > 0 and a lower semicontinuous (respectively, continuous)
function V : S
α
→ R such that V (·) is continuous at x = p, V (p) = 0,
V (x) > 0, x ∈ S
α
, x 6= p, and V (P (x)) − V (x) ≤ 0, x ∈ U
α
(respectively,
V (P (x)) −V (x) < 0, x ∈ U
α
, x 6= p).
Next, we present Poincar´e’s stability th eorem.
Theorem 4.34. Consider the nonlinear dynamical system (4.251) with
the Poincar´e map defined by (4.278). Assume that the point p ∈ D generates
the periodic orbit O
△
= {x ∈ D : x = s(t, p), 0 ≤ t ≤ T }, where s(t, p), t ≥ 0,
is the perio dic solution with period T ≡ τ(p). Then the following statements
hold:
i) p ∈ D is a Lyapunov stable fixed point of (4.280) if and only if the
periodic orbit O generated by p is Lyapunov stable.
ii) p ∈ D is an asymptotically stable fixed point of (4.280) if and only if
the periodic orbit O generated by p is asymptotically stable.
Proof. i) To s how necessity, assume that x = p is a Lyapunov stable
fixed point of (4.280). Then it follows from Theorem 4.33 that for sufficiently
small α > 0 there exists a lower semicontinuous function V
d
: S
α
→ R such
that V
d
(·) is continuous at x = p, V
d
(p) = 0, V
d
(x) > 0, x ∈ S
α
, x 6= p, and
V
d
(P (x))−V
d
(x) ≤ 0, x ∈ U
α
. Next, define a function V : O
α
→ R such that
V (x) = V
d
(s(τ(x), x)), x ∈ O
α
. It follows from the definition of τ (·), Lemma
4.4, and the j oint continuity of solutions of (4.251) that V (·) is a lower
semicontinuous function on O
α
and V (x) = 0, x ∈ O, V (x) > 0, x ∈ O
α
\O,
where O ⊂
◦
O
α
. Alternatively, it f ollows from the Lyapunov stability of the
fixed point x = p of (4.280) that for ε > 0 such th at B
ε
(p) ∩ S ⊂ U
α
,
there exists δ = δ(ε) > 0 such that z(k) ∈ B
ε
(p) ∩ S, k ∈ Z
+
, for all
z(0) ∈ B
δ
(p) ∩ S, where z(k) ∈ N satisfies (4.280). Now, define O
δ
△
= {x ∈
O
α
: s(τ(x), x) ∈ B
δ
(p) ∩ S} and note that O ⊂
◦
O
δ
. Hence, V (s(t, x)) ≤
V (s(τ, x)), 0 ≤ τ ≤ t, for every x ∈ O
δ
⊆ O
α
. Now, to show that V (·) is
continuous on O let p
O
∈ O be such that p
O
6= p and consider any arbitrary

NonlinearBook10pt November 20, 2007
294 CHAPTER 4
sequence {x
n
}
∞
n=0
∈ O
α
such that lim
n→∞
x
n
= p
O
. Then, since τ(·) is
continuous on D
1
\ H, it follows that lim
n→∞
τ(x
n
) = τ(p
O
) and, by joint
continuity of solutions of (4.251), s(τ(x
n
), x
n
) → s(τ(p
O
), p
O
) = p as n →
∞. Now, since V
d
(·) is continuous at x = p, it follows that lim
n→∞
V (x
n
) =
lim
n→∞
V
d
(s(τ(x
n
), x
n
)) = V
d
(p) = 0, which, since {x
n
}
∞
n=0
is arbitrary,
implies continuity of V (·) at any point p
O
∈ O, p
O
6= p.
Next, we show the continuity of V (·) at x = p. Note, that V (·) is
not necessarily continuous at every point of S but x = p. Consider any
arbitrary sequence {x
n
}
∞
n=0
∈ O
α
such that lim
n→∞
x
n
= p. For this
sequence we have one of the following three cases: either lim
n→∞
τ(x
n
) = 0,
lim
n→∞
τ(x
n
) = T , or there exist su bsequences {x
n
k
}
∞
k=0
and {x
n
m
}
∞
m=0
such that {x
n
k
}
∞
k=0
∪ {x
n
m
}
∞
m=0
= {x
n
}
∞
n=0
, x
n
k
→ p, τ(x
n
k
) → 0, as
k → ∞, and x
n
m
→ p, τ(x
n
m
) → T , as m → ∞. We assume the latter
case, sin ce the analysis for the first two cases follows immediately from the
arguments for p
O
∈ O, p
O
6= p, presented above. The characterization
of both subsequences and joint continuity of solutions of (4.251) yield
s(τ(x
n
k
), x
n
k
) → s(0, p) = p and s(τ(x
n
m
), x
n
m
) → s(T, p) = p, as k → ∞,
and m → ∞, respectively. Now, sin ce V
d
(·) is continuous at x = p, it
follows that lim
k→∞
V (x
n
k
) = lim
k→∞
V
d
(s(τ(x
n
k
), x
n
k
)) = V
d
(p) = 0 and
lim
m→∞
V (x
n
m
) = lim
m→∞
V
d
(s(τ(x
n
m
), x
n
m
)) = V
d
(p) = 0, and thus,
lim
n→∞
V (x
n
) = V (p) = 0, which implies that V (·) is continuous at x = p,
and hence, V (·) is continuous on O. Finally, since all th e assump tions of
Theorem 4.29 hold, the periodic orbit O is Lyapunov stable.
To show suffi ciency, assume that the periodic orbit O generated by the
point p ∈ D is Lyapunov s table. Th en it follows from the Theorem 4.30 that
there exists a lower semicontinuous, positive-definite (on D
a
\ O) function
V : D
a
→ R such that (4.261) is satisfied. Now, for sufficiently small α > 0,
construct a function V
d
: S
α
→ R such that V
d
(x) = V (x), x ∈ S
α
. Thus,
in this case the sufficient conditions of Theorem 4.33 are satisfied for V
d
(·),
which implies that the point x = p is a Lyapunov stable fixed point of
(4.280).
ii) To show necessity, assume that x = p is an asymptotically stable
fixed point of (4.280). Then it follows from T heorem 4.33 that there exists
a continuous function V
d
: S
α
→ R such that V
d
(p) = 0, V
d
(x) > 0, x ∈
S
α
, x 6= p, and V
d
(P (x)) − V
d
(x) < 0, x ∈ U
α
, x 6= p. Next, as in i),
construct the lower semicontinuous function V : O
α
→ R such that V (x) =
V
d
(s(τ(x), x)), x ∈ O
α
, V (x) = 0, x ∈ O, V (x) > 0, x ∈ O
α
, x 6∈ O,
V (s(t, x)) ≤ V (s(τ, x)), 0 ≤ τ ≤ t, for every x ∈ O
δ
⊆ O
α
, and V (·)
is continuous on O. Furthermore, for every x ∈ O
δ
define an increasing
unbounded sequence {t
n
}
∞
n=0
such that t
0
= 0 and t
k
= τ(z(k − 1)), k =
1, 2, . . ., where z(·) satisfies (4.280) with z(0) = x. Th en it follows from