Haddad W.M. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach
Подождите немного. Документ загружается.


NonlinearBook10pt November 20, 2007
STABILITY THEORY FOR NONLINEAR SYSTEMS 205
Finally, the concept of s emistability introduced in Problem 3.44 is due
to Bhat and Bernstein [54] for nonlinear systems and Campbell and Rose [81]
for linear systems. See also Bernstein and Bhat [46]. Finite-time stability
as introduced in Problem 3.43 is due to Bhat and Bernstein [55]. Stability
theory for functional retarded systems as introduced in Problem 3.65 is due
to Krasovskii [245] with an excellent textbook treatment given by Hale and
Lunel [181].

NonlinearBook10pt November 20, 2007
NonlinearBook10pt November 20, 2007
Chapter Four
Advanced Stability Theory
4.1 Introduction
In Chapter 3, we developed the basic concepts and mathematical tools for
Lyapunov stability theory. In this chapter, we present several generalizations
and extensions of Lyapunov stability theory. In particular, partial stability
theorems are presented and derived, wherein stability with respect to
part of the system state is addressed. In addition, we present stability
theorems for time-varying nonlinear dynamical systems as a special case of
partial stability. Lagrange stability, boundedness, ultimate boun dedness,
input-to-state stability, finite-time stability, and semistability notions are
also p resented. Finally, advanced stability theorems involving generalized
Lyapunov functions, stability of sets, stability of periodic orbits, and
stability theorems via vector L yapunov fu nctions are also established.
4.2 Partial Stability o f Nonlinear Dynamical Systems
In m any engineering applications, partial stability, that is, stability with
respect to part of the system’s states, is often necessary. I n particular,
partial stability arises in the study of electromagnetics [482], inertial
navigation systems [403], spacecraft stabilization via gimballed gyroscopes
and/or flywheels [448], combustion s y s tems [16], vibrations in rotating
machinery [289], and biocenology [368], to cite but a few examples. For
example, in the field of biocenology involving Lotka-Volterra predator-prey
models of population dynamics with age structure, if some of the species
preyed upon are left alone, then the corresponding population increases
without b ound while a subset of the prey species remains stable [368,
pp. 260–269]. The need to consider partial stability in the aforementioned
systems arises from the fact that stability notions involve equilibrium
co ordinates as well as a hyperplane of coordinates that is closed but not
compact. Hence, partial stability involves motion lying in a subspace instead
of an equilibrium point.
NonlinearBook10pt November 20, 2007
208 CHAPTER 4
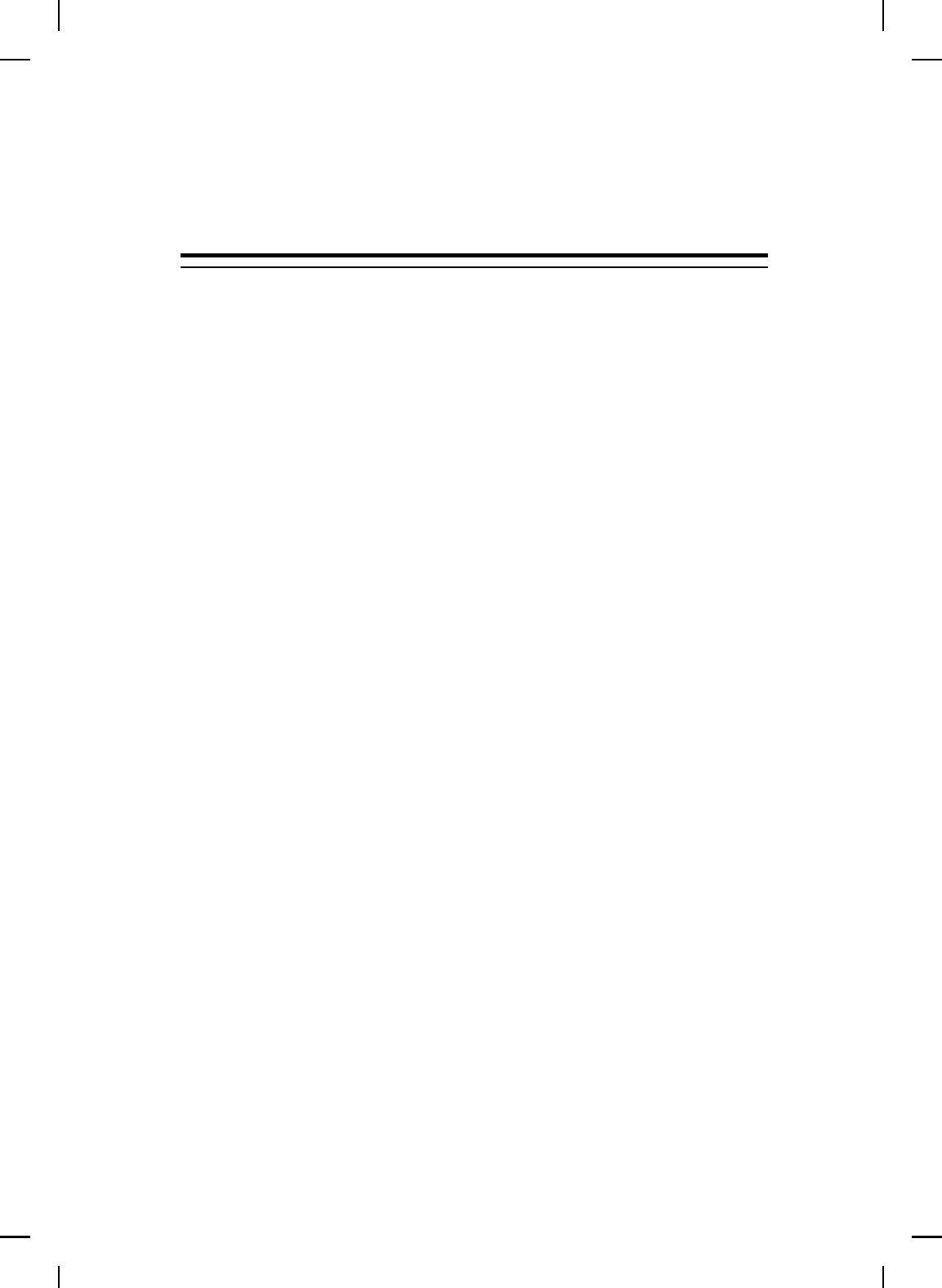
r
l
A
B
θ
Motor
Figure 4.1 Slider-crank mechanism.
Additionally, partial stabilization, that is, closed-loop stability with
respect to part of the closed-lo op system’s state, also arises in many
engineering applications [289, 448]. S pecifically, in spacecraft stabilization
via gimballed gyroscop es asymp totic stability of an equilibrium position
of the spacecraft is sought wh ile requiring Lyapunov stability of the axis
of the gyroscope relative to the spacecraft [448]. Alternatively, in th e
control of rotating machinery with mass imbalance, spin stabilization about
a nonprincipal axis of inertia requires motion stabilization with respect
to a s ubspace instead of the origin [289]. Perhaps the most common
application wh ere partial stabilization is necessary is adaptive control,
wherein asymptotic stability of the closed-loop p lant states is guaranteed
without necessarily achieving parameter error convergence.
To further demonstrate the utility and need for partial stability theory,
we consider two simple examples. Specifically, consider the equation of
motion for the slider-crank mechanism shown in Figure 4.1 given by [44,199]
m(θ(t))
¨
θ(t) + c(θ(t))
˙
θ
2
(t) = u(t), θ(0) = θ
0
,
˙
θ(0) =
˙
θ
0
, t ≥ 0, (4.1)
where
m(θ) = m
B
r
2
+ m
A
r
2
sin θ +
r cos θ sin θ
p
l
2
− r
2
sin
2
θ
!
2
, (4.2)
c(θ) = m
A
r
2
sin θ +
r cos θ sin θ
p
l
2
− r
2
sin
2
θ
!
·
cos θ + r
l
2
(1 − 2 sin
2
θ) + r
2
sin
4
θ
(l
2
− r
2
sin
2
θ)
3/2
, (4.3)
and m
A
and m
B
are point masses, r and l are the lengths of the rods, and
u(·) is the control torque applied by the motor. Now, suppose we choose
the feedback control law u = φ(θ,
˙
θ) s o that the an gular velocity of the
crank is constant, that is,
˙
θ(t) → Ω as t → ∞, where Ω > 0. This implies
that θ(t) ≈ Ωt → ∞ as t → ∞. Furthermore, since m(θ) and c(θ) are
functions of θ we cannot ignore the angular position θ. Hence, sin ce θ does
not converge, it is clear that (4.1) is unstable in the standard sense but
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 209
partially asymptotically stable with respect to
˙
θ (see Definition 4.1).
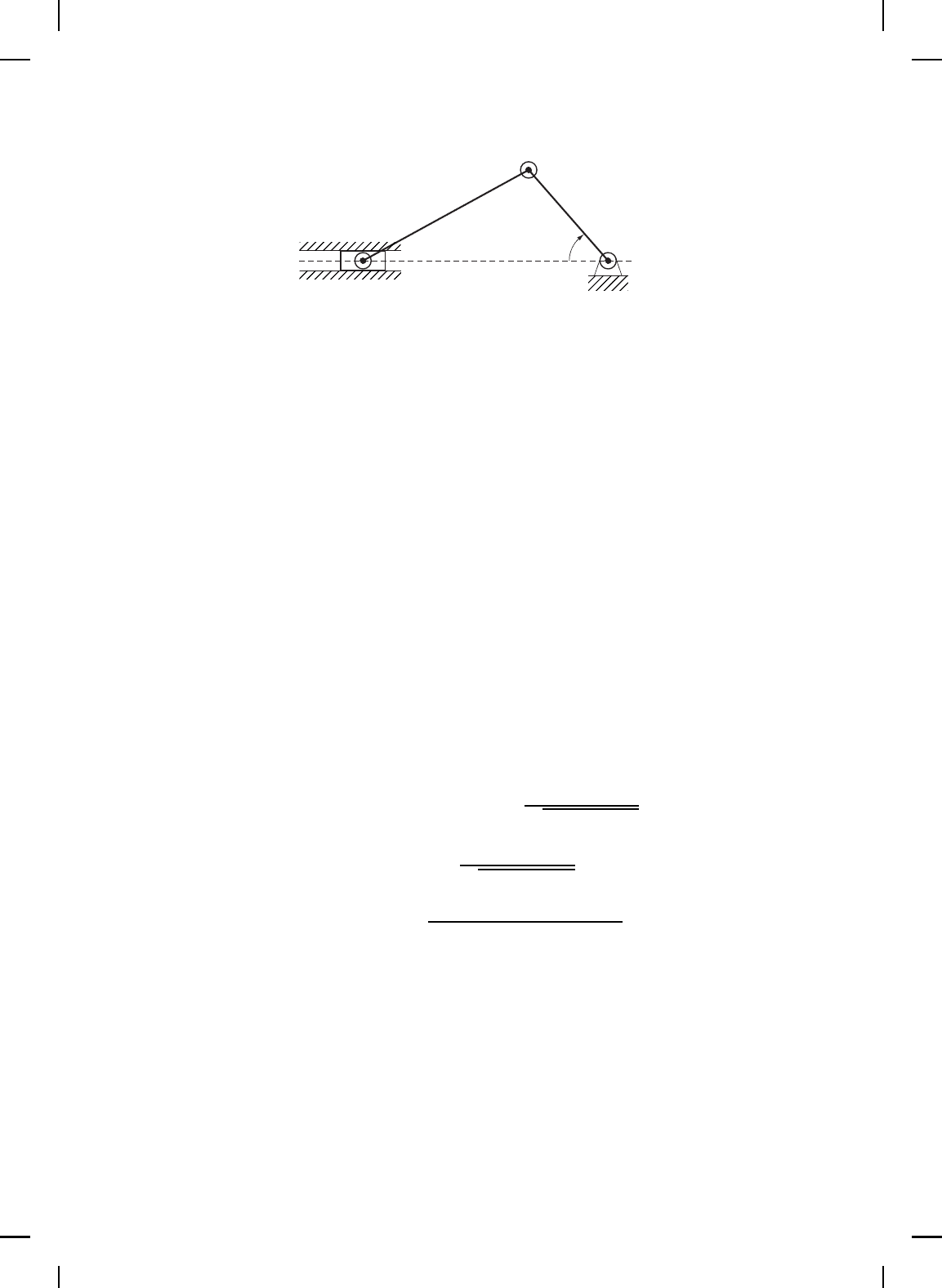
Our next example involves a nonlinear system originally studied as
a simplified model of a dual-spin spacecraft to investigate the resonance
capture phenomenon [365] and more recently was studied to investigate
the utility of a rotational/translational pr oof-mass actuator for stabilizing
translational motion [73]. The system (see Figure 4.2) involves an eccentric
rotational inertia on a translational oscillator giving rise to nonlinear
coupling between the undamped oscillator and the rotational rigid body
mode. The oscillator cart of mass M is connected to a fi x ed support via
a linear spring of stiffness k. The cart is constrained to one-dimensional
motion and the rotational proof-mass actuator consists of a m ass m and
mass moment of inertia I located at a distance e from the cart’s center of
mass. Letting q, ˙q, θ, and
˙
θ denote the translational position and velocity of
the cart and the angular position and velocity of the rotational pr oof mass,
respectively, the dynamic equations of m otion are given by
M
I
k
m
x
θ
Figure 4.2 Rotational/translational proof-mass actuator.
(M + m)¨q(t) + me[
¨
θ(t) cos θ(t) −
˙
θ
2
(t) sin θ(t)] + kq(t) = 0, (4.4)
(I + me
2
)
¨
θ(t) + me¨q(t) cos θ(t) = 0, (4.5)
where t ≥ 0, q(0) = q
0
, ˙q(0) = ˙q
0
, θ(0) = θ
0
, and
˙
θ(0) =
˙
θ
0
.
Note that since the motion is constrained to the horizontal plane, the
gravitational forces are not considered in the dynamic analysis. Analyzing
(4.4) and (4.5) (see Example 4.1 for details), it follows that the zero
solution (q(t), ˙q(t), θ(t),
˙
θ(t)) ≡ (0, 0, 0, 0) to (4.4) and (4.5) is unstable in
the standard sense but partially Lyapu nov stable with respect to q, ˙q, and
˙
θ
(see Definition 4.1). Once again, s tandard Lyapunov stability theory cannot
be used to arrive at th is result since the angular position θ of the rotational
proof mass cannot be ignored from (4.4) and (4.5) and θ(t) → ∞ as t → ∞.
Another application of partial stability theory is the extra flexibility

NonlinearBook10pt November 20, 2007
210 CHAPTER 4
it provides in constructing Lyapunov functions for nonlinear dynamical
systems. Specifically, generalizing Lyapunov’s stability theorem to include
partial s tability weakens the hypotheses on the Lyapunov function (see
Theorem 4.1) thus enlarging the class of allowable functions that can be
used in analyzing s ystem stability. Perhaps the clearest example of this is the
Lagrange-Dirichlet stability problem [368] involving the conservative E uler-
Lagrange system with a nonnegative-definite kinetic energy function T and
a positive-definite potential function U. In this case, the Lagrange-Dirichlet
energy function V = T + U is only nonnegative definite and, hence, cannot
be used as a Lyapunov fun ction candidate to analyze the stability of the
system using standard Lyapunov theory. However, the Lagrange-Dirichlet
energy function can be used as a valid L yapunov function within partial
stability theory to guarantee Lyapunov stability of the Lagrange-Dirichlet
problem (see Example 4.2).
In this section, we present partial stability theorems for nonlinear dy-
namical systems. Specifically, consider the nonlinear autonomous d ynamical
system
˙x
1
(t) = f
1
(x
1
(t), x
2
(t)), x
1
(0) = x
10
, t ∈ I
x
0
, (4.6)
˙x
2
(t) = f
2
(x
1
(t), x
2
(t)), x
2
(0) = x
20
, (4.7)
where x
1
∈ D, D ⊆ R
n
1
is an open set such that 0 ∈ D, x
2
∈ R
n
2
, f
1
:
D × R
n
2
→ R
n
1
is such that, for every x
2
∈ R
n
2
, f
1
(0, x
2
) = 0 and f
1
(·, x
2
)
is locally Lipschitz in x
1
, f
2
: D×R
n
2
→ R
n
2
is such that, for every x
1
∈ D,
f
2
(x
1
, ·) is locally Lipschitz in x
2
, and I
x
0
△
= [0, τ
x
0
), 0 < τ
x
0
≤ ∞, is the
maximal interval of existence for the solution (x
1
(t), x
2
(t)), t ∈ I
x
0
, to (4.6)
and (4.7). Note that u nder the above assumptions the solution (x
1
(t), x
2
(t))
to (4.6) and (4.7) exists and is unique over I
x
0
. The following definition
introduces eight types of partial stability, that is, stability with respect to
x
1
, f or the nonlinear dynamical system (4.6) and (4.7).
Definition 4.1. i) The nonlinear dynamical system (4.6) and (4.7) is
Lyapunov stable with respect to x
1
if, for every ε > 0 and x
20
∈ R
n
2
, there
exists δ = δ(ε, x
20
) > 0 such that kx
10
k < δ implies that kx
1
(t)k < ε for all
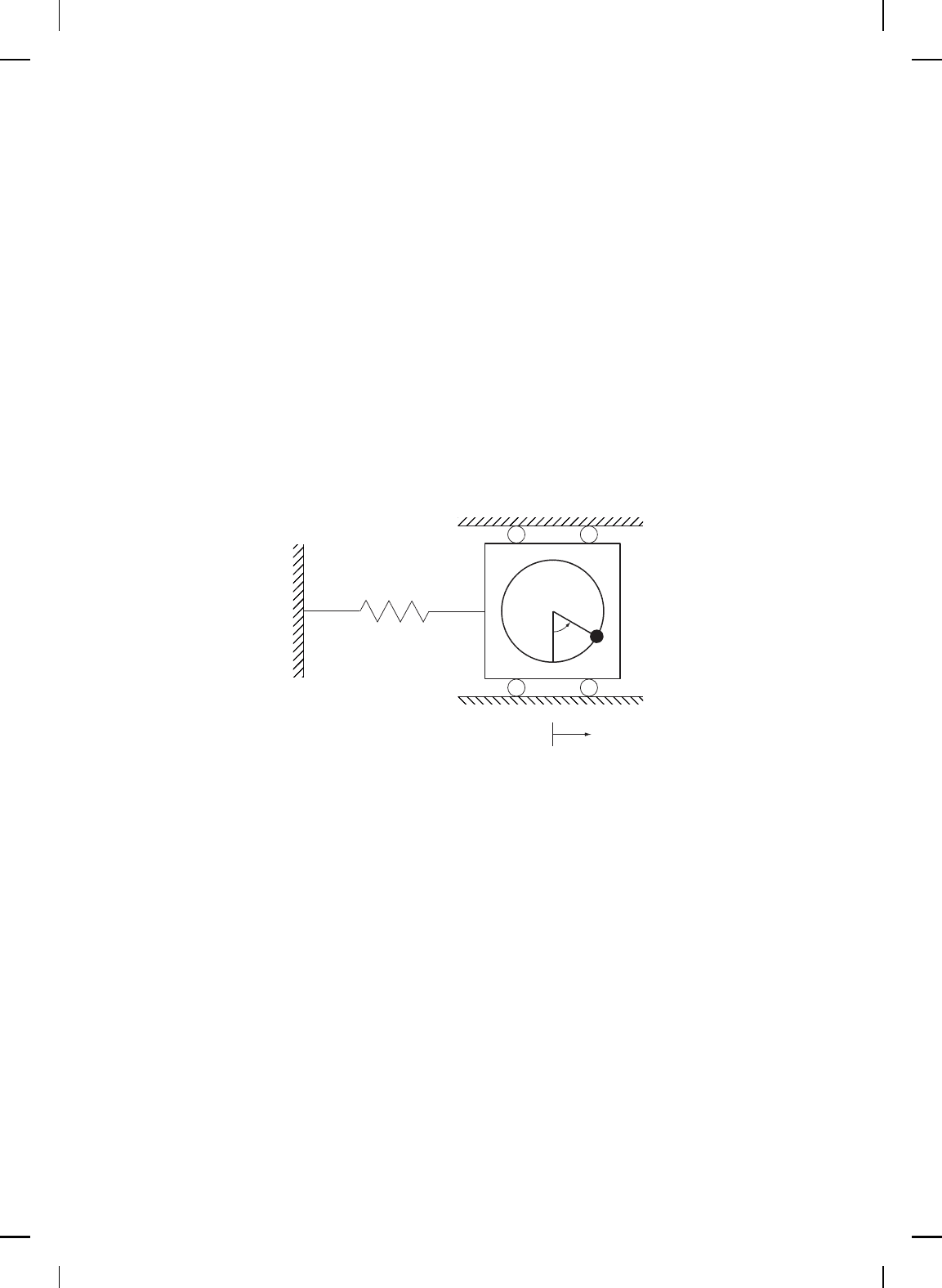
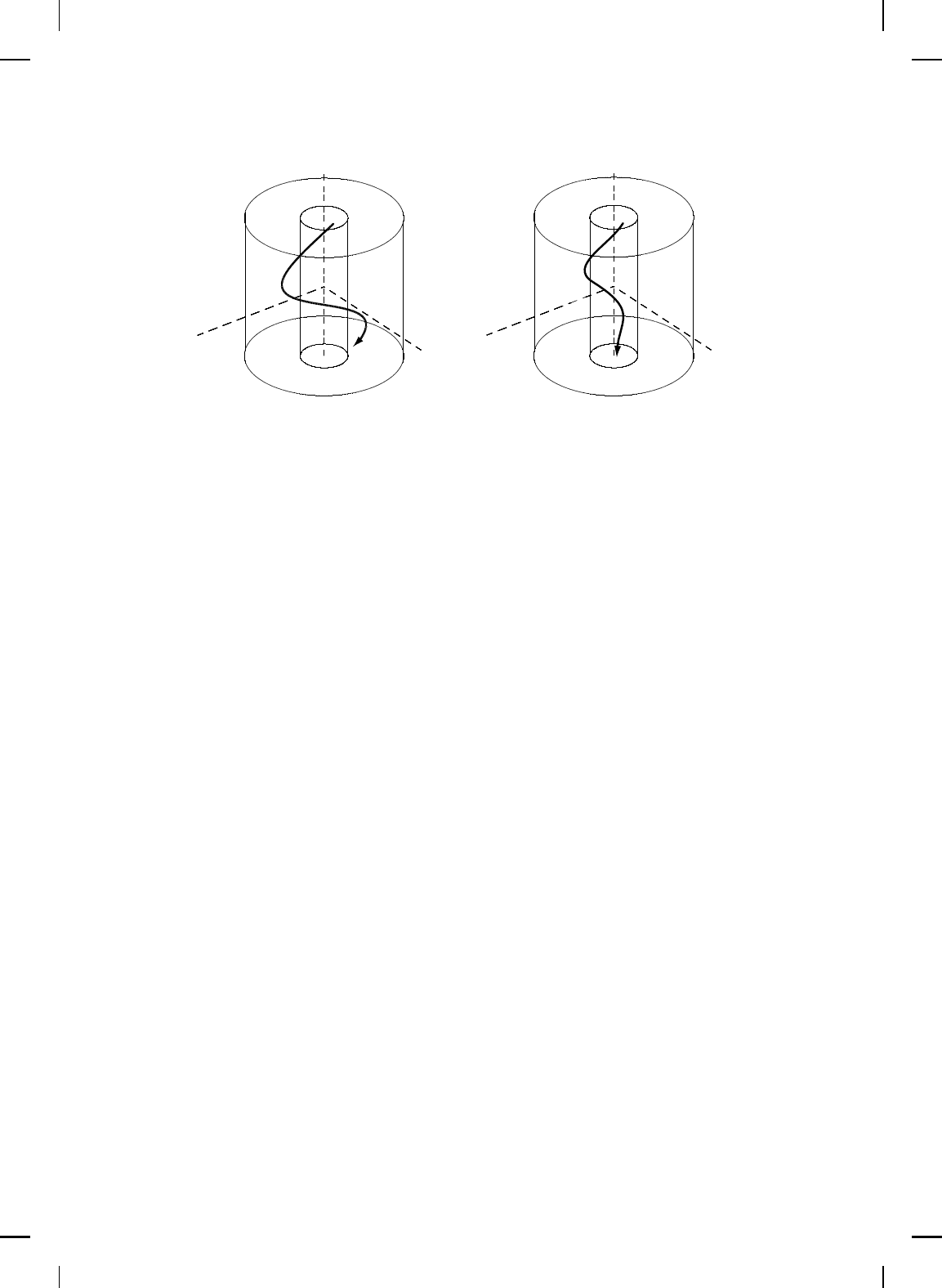
t ≥ 0 (see Figure 4.3(a)).
ii) The nonlinear dynamical system (4.6) and (4.7) is Lyapunov stable
with respect to x
1
uniformly in x
20
if, for every ε > 0, there exists δ =
δ(ε) > 0 such that kx
10
k < δ implies that kx
1
(t)k < ε for all t ≥ 0 and for
all x
20
∈ R
n
2
.
iii) The nonlinear dynamical system (4.6) and (4.7) is asymptotically
stable with re spect to x
1
if it is Lyapunov stable with respect to x
1
and, for
every x
20
∈ R
n
2
, there exists δ = δ(x
20
) > 0 such that kx
10
k < δ implies
NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 211
kx
10
k = δ
kx
10
k = ε
x(t)
y
1
y
2
z
kx
10
k = δ
kx
10
k = ε
x(t)
y
1
y
2
z
(a) (b)
Figure 4.3 (a) Partial Lyapunov stability with respect to x
1
. ( b) Partial asymptotic
stability with respect to x
1
. x
1
= [y
1
y
2
]
T
, x
2
= z, and x = [x
T
1
x
2
]
T
.
that lim
t→∞
x
1
(t) = 0 (see Figure 4.3(b)).
iv) The nonlinear d ynamical system (4.6) and (4.7) is asymptotically
stable with respect to x
1
uniformly in x
20
if it is Lyapunov stable with respect
to x
1
uniformly in x
20
and there exists δ > 0 such that kx
10
k < δ implies
that lim
t→∞
x
1
(t) = 0 uniformly in x
10
and x
20
for all x
20
∈ R
n
2
.
v) The nonlinear dynamical system (4.6) and (4.7) is globally asymp-
totically stable with respect to x
1
if it is Lyapunov stable with respect to x
1
and lim
t→∞
x
1
(t) = 0 for all x
10
∈ R
n
1
and x
20
∈ R
n
2
.
vi) The n on linear dynamical system (4.6) and (4.7) is globally asymp-
totically stable with re spect to x
1
uniformly in x
20
if it is Lyapun ov stable
with respect to x
1
uniformly in x
20
and lim
t→∞
x
1
(t) = 0 uniformly in x
10
and x
20
for all x
10
∈ R
n
1
and x
20
∈ R
n
2
.
vii) The nonlinear dynamical system (4.6) and (4.7) is exponentially
stable with respect to x
1
uniformly in x
20
if there exist scalars α, β, δ > 0 such
that kx
10
k < δ implies that kx
1
(t)k ≤ αkx
10
ke
−βt
, t ≥ 0, for all x
20
∈ R
n
2
.
viii) The nonlinear dynamical system (4.6) and (4.7) is globally
exponentially stable with respect to x
1
uniformly i n x
20
if there exist scalars
α, β > 0 such that kx
1
(t)k ≤ αkx
10
ke
−βt
, t ≥ 0, for all x
10
∈ R
n
1
and
x
20
∈ R
n
2
.
Next, we present sufficient conditions for partial stability of the
nonlinear dynamical system (4.6) and (4.7). For the following result define
˙
V (x
1
, x
2
)
△
= V
′
(x
1
, x
2
)f(x
1
, x
2
), where f (x
1
, x
2
)
△
= [f
T
1
(x
1
, x
2
) f
T
2
(x
1
, x
2
)]
T
,

NonlinearBook10pt November 20, 2007
212 CHAPTER 4
for a given continuously differentiable f unction V : D × R
n
2
→ R.
Furth ermore, we assume that the solution (x
1
(t), x
2
(t)) to (4.6) and (4.7)
exists and is unique for all t ≥ 0. It is important to note that unlike standard
theory (see Corollary 2.5) th e existence of a Lyapunov function V (x
1
, x
2
)
satisfying the conditions in Theorem 4.1 below is not sufficient to ensure
that all solutions of (4.6) and (4.7) starting in D × R
n
2
can be extended to
infinity, since none of the states of (4.6) and (4.7) serve as an independent
variable. We do note, however, that Lipschitz continuity of f
1
(·, ·) and f
2
(·, ·)
provides a sufficient condition for the existence and uniqueness of solutions
to (4.6) and (4.7) over a forward time interval.
Theorem 4.1. Consider the nonlinear dynamical system (4.6) and
(4.7). Then the following statements hold:
i) I f there exist a continuous ly differentiable function V : D × R
n
2
→ R
and a class K function α(·) such that
V (0, x
2
) = 0, x
2
∈ R
n
2
, (4.8)
α(kx
1
k) ≤ V (x
1
, x
2
), (x
1
, x
2
) ∈ D × R
n
2
, (4.9)
˙
V (x
1
, x
2
) ≤ 0, (x
1
, x
2
) ∈ D × R
n
2
, (4.10)
then the nonlinear dynamical system given by (4.6) and (4.7) is
Lyapunov s table with respect to x
1
.
ii) If there exist a continuously differentiable fun ction V : D × R
n
2
→ R
and class K functions α(·), β(·) satisfying (4.9), (4.10), and
V (x
1
, x
2
) ≤ β(kx
1
k), (x
1
, x
2
) ∈ D × R
n
2
, (4.11)
then the nonlinear dynamical system given by (4.6) and (4.7) is
Lyapunov s table with respect to x
1
uniformly in x
20
.
iii) If there exist continuously differentiable functions V : D × R
n
2
→ R
and W : D ×R
n
2
→ R, and class K functions α(·), β(·), and γ(·) such
that
˙
W (x
1
(·), x
2
(·)) is bounded from below or above, (4.8) and (4.9)
hold, and
W (0, x
2
) = 0, x
2
∈ R
n
2
, (4.12)
β(kx
1
k) ≤ W (x
1
, x
2
), (x
1
, x
2
) ∈ D × R
n
2
, (4.13)
˙
V (x
1
, x
2
) ≤ −γ(W (x
1
, x
2
)), (x
1
, x
2
) ∈ D × R
n
2
, (4.14)
then the nonlinear dynamical system given by (4.6) and (4.7) is
asymptotically stable with respect to x
1
.
iv) If there exist a continuously differentiable function V : D × R
n
2
→ R
and class K functions α(·), β(·), γ(·) s atisfying (4.9), (4.11), and
˙
V (x
1
, x
2
) ≤ −γ(kx
1
k), (x
1
, x
2
) ∈ D × R
n
2
, (4.15)

NonlinearBook10pt November 20, 2007
ADVANCED STABILITY THEORY 213
then the nonlinear dynamical system given by (4.6) and (4.7) is
asymptotically stable with respect to x
1
uniformly in x
20
.
v) If D = R
n
1
and there exist continuously differentiable functions V :
R
n
1
× R
n
2
→ R and W : R
n
1
× R
n
2
→ R, class K functions β(·), γ(·),
and a class K
∞
function α(·) such that
˙
W (x
1
(·), x
2
(·)) is bounded
from below or above, and (4.8), (4.9), and (4.12)–(4.14) hold, then
the nonlinear dynamical system given by (4.6) and (4.7) is globally
asymptotically stable with respect to x
1
.
vi) If D = R
n
1
and there exist a continuously differentiable function
V : R
n
1
× R
n
2
→ R, a class K function γ(·), and class K
∞
functions
α(·), β(·) satisfying (4.9), (4.11), and (4.15), then the nonlinear
dynamical system given by (4.6) and (4.7) is globally asymptotically
stable with respect to x
1
uniformly in x
20
.
vii) If there exist a continuously differentiable function V : D × R
n
2
→ R
and positive constants α, β, γ, p ≥ 1 satisfying
αkx
1
k
p
≤ V (x
1
, x
2
) ≤ βkx
1
k
p
, (x
1
, x
2
) ∈ D × R
n
2
, (4.16)
˙
V (x
1
, x
2
) ≤ −γkx
1
k
p
, (x
1
, x
2
) ∈ D × R
n
2
, (4.17)
then the nonlinear dynamical system given by (4.6) and (4.7) is
exponentially stable with respect to x
1
uniformly in x
20
.
viii) If D = R
n
1
and there exist a continuously differentiable function V :
R
n
1
× R
n
2
→ R and positive constants α, β, γ, p ≥ 1 satisfying (4.16)
and (4.17), then the nonlinear dynamical system given by (4.6) and
(4.7) is globally exponentially stable with respect to x
1
uniformly in
x
20
.
Proof. i) Let x
20
∈ R
n
2
, let ε > 0 be such that B
ε
(0)
△
= {x
1
∈
R
n
1
: kx
1
k < ε} ⊂ D, define η
△
= α(ε), and define D
η
△
= {x
1
∈ B
ε
(0) :
V (x
1
, x
20
) < η}. Since V (·, ·) is continuous and V (0, x
20
) = 0 it follows that
D
η
is nonempty and there exists δ = δ(ε, x
20
) > 0 such that V (x
1
, x
20
) < η,
x
1
∈ B
δ
(0). Hence, B
δ
(0) ⊆ D
η
. Next, since
˙
V (x
1
, x
2
) ≤ 0 it follows
that V (x
1
(t), x
2
(t)) is a nonincreasing function of time, and h en ce, for every
x
10
∈ B
δ
(0) ⊆ D
η
it follows that
α(kx
1
(t)k) ≤ V (x
1
(t), x
2
(t)) ≤ V (x
10
, x
20
) < η = α(ε).
Thus , for every x
10
∈ B
δ
(0) ⊆ D
η
, x
1
(t) ∈ B
ε
(0), t ≥ 0, establishing
Lyapunov s tability with respect to x
1
.
ii) Let ε > 0 and let B
ε
(0) and η be given as in the proof of i). Now,
let δ = δ(ε) > 0 be such that β(δ) = α(ε). Then it follows from (4.11) that

NonlinearBook10pt November 20, 2007
214 CHAPTER 4
for all (x
10
, x
20
) ∈ B
δ
(0) ×R
n
2
,
α(kx
1
(t)k) ≤ V (x
1
(t), x
2
(t)) ≤ V (x
10
, x
20
) < β(δ) = α(ε),
and h en ce, x
1
(t) ∈ B
ε
(0), t ≥ 0.
iii) Lyapunov stability follows from i). To show asymptotic stability
suppose, ad absurdum, that W (x
1
(t), x
2
(t)) 9 0 as t → ∞ or, equivalently,
lim sup
t→∞
W (x
1
(t), x
2
(t)) > 0. In addition, suppose lim inf
t→∞
W (x
1
(t),
x
2
(t)) > 0, which implies that there exist constants T > 0 and k > 0
such that W (x
1
(t), x
2
(t)) ≥ k, t ≥ T . Then it follows from (4.14) that
V (x
1
(t), x
2
(t)) → −∞ as t → ∞, which contradicts (4.9), and hence,
lim inf
t→∞
W (x
1
(t), x
2
(t)) = 0. Now, since lim sup
t→∞
W (x
1
(t), x
2
(t)) > 0
and lim inf
t→∞
W (x
1
(t), x
2
(t)) = 0 it follows that there exist two increasing
sequences {t
i
}
∞
i=0
and {t
′
i
}
∞
i=0
, and a constant k > 0 such that t
i
< t
′
i
< t
i+1
,
i = 0, 1, . . ., t
i
→ ∞ as i → ∞, and
W (x
1
(t
i
), x
2
(t
i
)) =
k
2
< W (x
1
(t), x
2
(t)) < k = W (x
1
(t
′
i
), x
2
(t
′
i
)),
t
i
< t < t
′
i
, i = 0, 1, . . . . (4.18)
Furth ermore, since
˙
W (x
1
(·), x
2
(·)) is upper (respectively, lower) bounded
there exists η > 0 (respectively, η < 0) such that
˙
W (x
1
(t), x
2
(t)) ≤ η, t ≥ 0
(respectively,
˙
W (x
1
(t), x
2
(t)) ≥ η, t ≥ 0). In the case where
˙
W (x
1
(·), x
2
(·))
is upper bounded it follows from (4.18) that t
′
i
− t
i
≥
k
2η
, i = 1, 2, . . ., and
hence,
R
t
′
i
t
i
γ(W (x
1
(t), x
2
(t)))dt ≥ γ(
k
2
)
k
2η
. Now, using (4.14), it follows that
V (x
1
(t
′
n
), x
2
(t
′
n
)) = V (x
10
, x
20
) +
Z
t
1
0
˙
V (x
1
(t), x
2
(t))dt
+
n
X
i=1
Z
t
′
i
t
i
˙
V (x
1
(t), x
2
(t))dt
+
n−1
X
i=1
Z
t
i+1
t
′
i
˙
V (x
1
(t), x
2
(t))dt
≤ V (x
10
, x
20
) +
n
X
i=1
Z
t
′
i
t
i
˙
V (x
1
(t), x
2
(t))dt
≤ V (x
10
, x
20
) −
n
X
i=1
Z
t
′
i
t
i
γ(W (x
1
(t), x
2
(t)))dt
≤ V (x
10
, x
20
) −nγ
k
2
k
2η
. (4.19)
Hence, for sufficiently large n the right-hand side of (4.19) becomes negative,
which contradicts (4.9). The case where
˙
W (x
1
(·), x
2
(·)) is lower bounded
leads to a similar contradiction using identical arguments. Thus, in either