Greene W.H. Econometric Analysis
Подождите немного. Документ загружается.

CHAPTER 19
✦
Limited Dependent Variables
899
Finally, the issue of sample selection arises when the observed data are not drawn
randomly from the population of interest. Failure to account for this nonrandom sam-
pling produces a model that describes only the nonrandom subsample, not the larger
population. In each case, we examined the model specification and estimation tech-
niques which are appropriate for these variations of the regression model. Maximum
likelihood is usually the method of choice, but for the third case, a two-step estimator
has become more common. The leading contemporary application of selection meth-
ods and endogenous sampling is in the measure of treatment effects. We considered
three approaches to analysis of treatment effects; regression methods, propensity score
matching, and regression discontinuity.
Key Terms and Concepts
•
Accelerated failure time
model
•
Attenuation
•
Average treatment effect
•
Average treatment effect on
the treated
•
Censored regression model
•
Censored variable
•
Censoring
•
Conditional mean
assumption
•
Conditional moment test
•
Control function
•
Corner solution model
•
Data envelopment analysis
•
Degree of truncation
•
Delta method
•
Difference in differences
•
Duration model
•
Exponential
•
Exponential model
•
Fuzzy design
•
Generalized residual
•
Hazard function
•
Hazard rate
•
Heterogeneity
•
Heteroscedasticity
•
Hurdle model
•
Incidental truncation
•
Instrumetal variable
estimation
•
Integrated hazard function
•
Inverse probability
weighted estimator
•
Inverse Mills ratio
•
Lagrange multiplier test
•
Matching estimator
•
Mean independence
assumption
•
Missing counterfactual
•
Negative duration
dependence
•
Olsen’s reparameterization
•
Parametric
•
Parametric model
•
Partial likelihood
•
Positive duration
dependence
•
Product limit estimator
•
Propensity score
•
Proportional hazard
•
Regression discontinuity
design
•
Risk set
•
Rubin causal model
•
Sample selection
•
Selection on observables
•
Selection on unobservables
•
Semiparametric estimator
•
Semiparametric model
•
Specification error
•
Stochastic frontier model
•
Survival function
•
Time-varying covariate
•
Tobit model
•
Treatment effect
•
Truncated distribution
•
Truncated mean
•
Truncated normal
distribution
•
Truncated random variable
•
Truncated standard normal
distribution
•
Truncated variance
•
Truncation
•
Two-step estimation
•
Type II tobit model
•
Weibull model
•
Weibull survival model
Exercises
1. The following 20 observations are drawn from a censored normal distribution:
3.8396 7.2040 0.00000 0.00000 4.4132 8.0230
5.7971 7.0828 0.00000 0.80260 13.0670 4.3211
0.00000 8.6801 5.4571 0.00000 8.1021 0.00000
1.2526 5.6016

900
PART IV
✦
Cross Sections, Panel Data, and Microeconometrics
The applicable model is
y
∗
i
= μ + ε
i
,
y
i
= y
∗
i
if μ + ε
i
> 0, 0 otherwise,
ε
i
∼ N[0,σ
2
].
Exercises 1 through 4 in this section are based on the preceding information. The
OLS estimator of μ in the context of this tobit model is simply the sample mean.
Compute the mean of all 20 observations. Would you expect this estimator to over-
or underestimate μ? If we consider only the nonzero observations, then the trun-
cated regression model applies. The sample mean of the nonlimit observations
is the least squares estimator in this context. Compute it and then comment on
whether this sample mean should be an overestimate or an underestimate of the true
mean.
2. We now consider the tobit model that applies to the full data set.
a. Formulate the log-likelihood for this very simple tobit model.
b. Reformulate the log-likelihood in terms of θ = 1/σ and γ = μ/σ . Then derive
the necessary conditions for maximizing the log-likelihood with respect to θ
and γ .
c. Discuss how you would obtain the values of θ and γ to solve the problem in
part b.
d. Compute the maximum likelihood estimates of μ and σ .
3. Using only the nonlimit observations, repeat Exercise 2 in the context of the trun-
cated regression model. Estimate μ and σ by using the method of moments esti-
mator outlined in Example 19.2. Compare your results with those in the previous
exercises.
4. Continuing to use the data in Exercise 1, consider once again only the nonzero
observations. Suppose that the sampling mechanism is as follows: y
∗
and another
normally distributed random variable z have population correlation 0.7. The two
variables, y
∗
and z, are sampled jointly. When z is greater than zero, y is re-
ported. When z is less than zero, both z and y are discarded. Exactly 35 draws
were required to obtain the preceding sample. Estimate μ and σ. (Hint: Use Theo-
rem 19.5.)
5. Derive the partial effects for the tobit model with heteroscedasticity that is de-
scribed in Section 19.3.5.a.
6. Prove that the Hessian for the tobit model in (19-14) is negative definite after
Olsen’s transformation is applied to the parameters.
Applications
1. We examined Ray Fair’s famous analysis (Journal of Political Economy, 1978) of a
Psychology Today survey on extramarital affairs in Example 18.9 using a Poisson
regression model. Although the dependent variable used in that study was a count,
Fair (1978) used the tobit model as the platform for his study. You can reproduce
the tobit estimates in Fair’s paper easily with any software package that contains
a tobit estimator—most do. The data appear in Appendix Table F18.1. Reproduce
CHAPTER 19
✦
Limited Dependent Variables
901
Fair’s least squares and tobit estimates. Compute the partial effects for the model
and interpret all results.
2. The Mroz (1975) data used in Example 19.11 (see Appendix Table F5.1) also de-
scribe a setting in which the Tobit model has been frequently applied. The sample
contains 753 observations on labor market outcomes for married women, including
the following variables:
lfp = indicator (0/1) for whether in the formal labor market (lfp = 1)
or not (lfp = 0),
whrs = wife’s hours worked,
kl6 = number of children under 6 years old in the household,
k618 = number of children from 6 to 18 years old in the household,
wa = wife’s age,
we = wife’s education,
ww = wife’s hourly wage,
hhrs = husband’s hours worked,
ha = husband’s age,
hw = husband’s wage,
faminc = family income from other sources,
wmed = wife’s mother’s education
wfed = wife’s father’s education
cit = dummy variable for living in an urban area,
ax = labor market experience = age − we − 5,
and several variables that will not be useful here. Using these data, estimate a tobit
model for the wife’s hours worked. Report all results including partial effects and
relevant diagnostic statistics. Repeat the analysis for the wife’s labor earnings, ww
times whrs. Which is a more plausible model?
3. Continuing the analysis of the previous application, note that these data conform
precisely to the description of “corner solutions” in Section 19.3.4. The dependent
variable is not censored in the fashion usually assumed for a tobit model. To inves-
tigate whether the dependent variable is determined by a two-part decision process
(yes/no and, if yes, how much), specify and estimate a two-equation model in which
the first equation analyzes the binary decision lfp = 1ifwhrs > 0 and 0 otherwise
and the second equation analyzes whrs |whrs > 0. What is the appropriate model?
What do you find? Report all results.
4. StochasticFrontier Model. Section 10.5.1 presents estimates of a Cobb–Douglas
cost function using Nerlove’s 1955 data on the U.S. electric power industry. Chris-
tensen and Greene’s 1976 update of this study used 1970 data for this industry. The
Christensen and Greene data are given in Appendix Table F4.4. These data have
902
PART IV
✦
Cross Sections, Panel Data, and Microeconometrics
provided a standard test data set for estimating different forms of production and
cost functions, including the stochastic frontier model discussed in Section 19.2.4. It
has been suggested that one explanation for the apparent finding of economies of
scale in these data is that the smaller firms were inefficient for other reasons. The
stochastic frontier might allow one to disentangle these effects. Use these data to
fit a frontier cost function which includes a quadratic term in log output in addi-
tion to the linear term and the factor prices. Then examine the estimated Jondrow
et al. residuals to see if they do indeed vary negatively with output, as suggested.
(This will require either some programming on your part or specialized software.
The stochastic frontier model is provided as an option in Stata, TSP, and LIMDEP.
Or, the likelihood function can be programmed fairly easily for RATS, MatLab,
or GAUSS.) (Note: For a cost frontier as opposed to a production frontier, it is
necessary to reverse the sign on the argument in the function that appears in the
log-likelihood.)

20
SERIAL CORRELATION
Q
20.1 INTRODUCTION
Time-series data often display autocorrelation, or serial correlation of the disturbances
across periods. Consider, for example, the plot of the least squares residuals in the
following example.
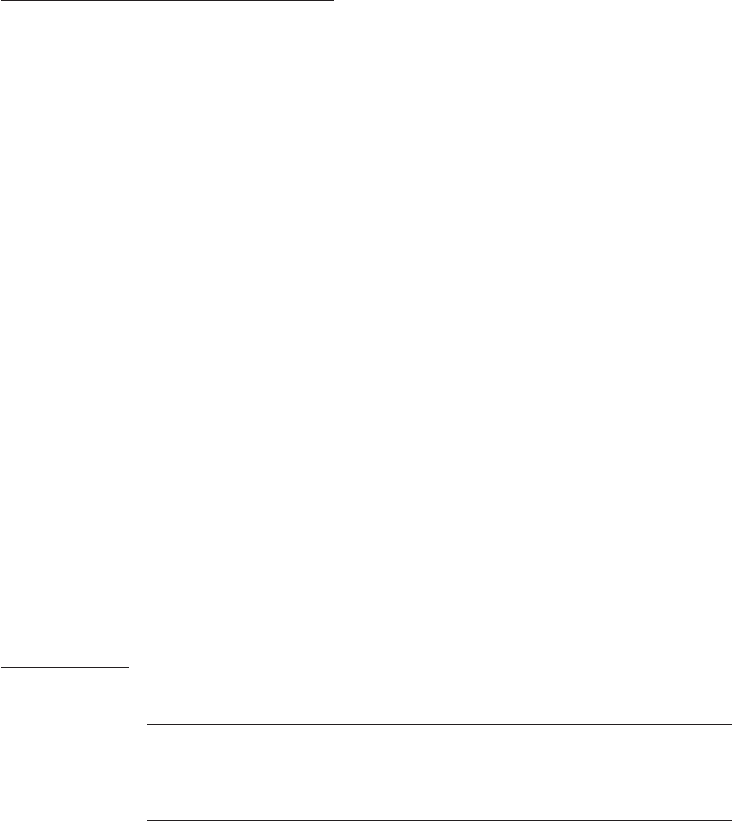
Example 20.1 Money Demand Equation
Appendix Table F5.2 contains quarterly data from 1950.1 to 2000.4 on the U.S. money stock
(M1) and output (real GDP) and the price level (CPI
U). Consider a simple (extremely) model
of money demand,
1
ln M1
t
= β
1
+ β
2
ln GDP
t
+ β
3
ln CPI
t
+ ε
t
.
A plot of the least squares residuals is shown in Figure 20.1. The pattern in the residuals
suggests that knowledge of the sign of a residual in one period is a good indicator of the sign of
the residual in the next period. This knowledge suggests that the effect of a given disturbance
is carried, at least in part, across periods. This sort of “memory” in the disturbances creates
the long, slow swings from positive values to negative ones that is evident in Figure 20.1. One
might argue that this pattern is the result of an obviously naive model, but that is one of the
important points in this discussion. Patterns such as this usually do not arise spontaneously;
to a large extent, they are, indeed, a result of an incomplete or flawed model specification.
One explanation for autocorrelation is that relevant factors omitted from the time-
series regression, like those included, are correlated across periods. This fact may be
due to serial correlation in factors that should be in the regression model. It is easy to
see why this situation would arise. Example 20.2 shows an obvious case.
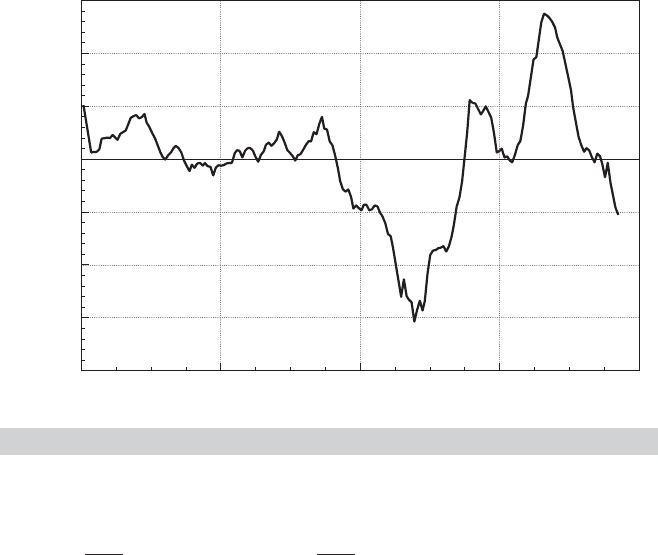
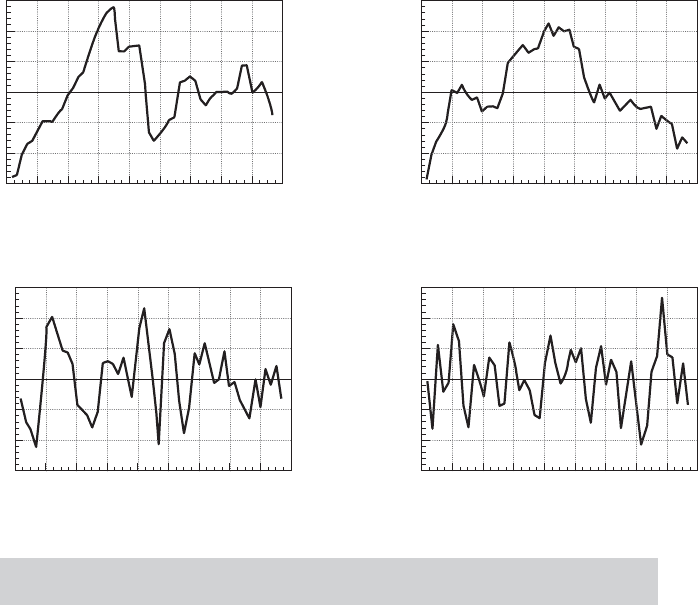
Example 20.2 Autocorrelation Induced by Misspecification
of the Model
In Examples 2.3, 4.2 and 4.8, we examined yearly time-series data on the U.S. gasoline market
from 1953 to 2004. The evidence in the examples was convincing that a regression model
of variation in ln G/Pop should include, at a minimum, a constant, ln P
G
and ln income/Pop.
Other price variables and a time trend also provide significant explanatory power, but these
two are a bare minimum. Moreover, we also found on the basis of a Chow test of structural
change that apparently this market changed structurally after 1974. Figure 20.2 displays
plots of four sets of least squares residuals. Parts (a) through (c) show clearly that as the
specification of the regression is expanded, the autocorrelation in the “residuals” diminishes.
Part (c) shows the effect of forcing the coefficients in the equation to be the same both before
and after the structural shift. In part (d), the residuals in the two subperiods 1953 to 1974 and
1975 to 2004 are produced by separate unrestricted regressions. This latter set of residuals
is almost nonautocorrelated. (Note also that the range of variation of the residuals falls as
1
Because this chapter deals exclusively with time-series data, we shall use the index t for observations and T
for the sample size throughout.
903
904
PART V
✦
Time Series and Macroeconometrics
1950
0.225
0.150
0.075
0.000
0.300
0.225
0.150
0.075
1963 1976
Quarter
Residual
1989 2002
FIGURE 20.1
Autocorrelated Least Squares Residuals.
the model is improved, i.e., as its fit improves.) The full equation is
ln
G
t
Pop
t
= β
1
+ β
2
ln P
Gt
+ β
3
ln
I
t
Pop
t
+ β
4
ln P
NCt
+ β
5
ln P
UCt
+β
6
ln P
PT t
+ β
7
ln P
Nt
+ β
8
ln P
Dt
+ β
9
ln P
St
+ β
10
t + ε
t
.
Finally, we consider an example in which serial correlation is an anticipated part of the
model.
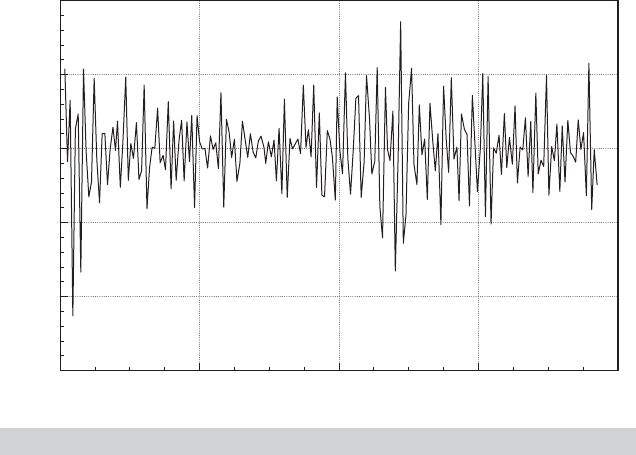
Example 20.3 Negative Autocorrelation in the Phillips Curve
The Phillips curve [Phillips (1957)] has been one of the most intensively studied relationships
in the macroeconomics literature. As originally proposed, the model specifies a negative re-
lationship between wage inflation and unemployment in the United Kingdom over a period of
100 years. Recent research has documented a similar relationship between unemployment
and price inflation. It is difficult to justify the model when cast in simple levels; labor market
theories of the relationship rely on an uncomfortable proposition that markets persistently
fall victim to money illusion, even when the inflation can be anticipated. Current research
[e.g., Staiger et al. (1996)] has reformulated a short-run (disequilibrium) “expectations aug-
mented Phillips curve” in terms of unexpected inflation and unemployment that deviates from
a long-run equilibrium or “natural rate.” The expectations-augmented Phillips curve can
be written as
p
t
− E[p
t
|
t−1
] = β[u
t
− u
∗
] + ε
t
where p
t
is the rate of inflation in year t, E [p
t
|
t−1
] is the forecast of p
t
made in period
t − 1 based on information available at time t − 1,
t−1
, u
t
is the unemployment rate and u
∗
is the natural, or equilibrium rate. (Whether u
∗
can be treated as an unchanging parameter,
as we are about to do, is controversial.) By construction, [u
t
− u
∗
] is disequilibrium, or cycli-
cal unemployment. In this formulation, ε
t
would be the supply shock (i.e., the stimulus that
produces the disequilibrium situation). To complete the model, we require a model for the
expected inflation. For the present, we’ll assume that economic agents are rank empiricists.
CHAPTER 20
✦
Serial Correlation
905
0.30
0.20
0.10
0.00
0.10
0.20
0.30
1952 1964 1976 1988 2000
Residual
Year
Panel
(
a
)
0.150
0.100
0.050
0.000
0.050
0.100
0.150
Residual
1952 1964 1976 1988 2000
Year
Panel
(
b
)
0.075
0.050
0.025
0.000
0.025
0.050
0.075
Residual
1952 1964 1976 1988 2000
Year
Panel (c)
0.030
0.020
0.010
0.000
0.010
0.020
0.030
Residual
1952 1964 1976 1988 2000
Year
Panel (d)
FIGURE 20.2
Unstandardized Residuals (Bars mark mean res. and
+/ − 2s(e)
).
The forecast of next year’s inflation is simply this year’s value. This produces the estimating
equation
p
t
− p
t−1
= β
1
+ β
2
u
t
+ ε
t
where β
2
= β and β
1
=−βu
∗
. Note that there is an implied estimate of the natural rate of un-
employment embedded in the equation. After estimation, u
∗
can be estimated by −b
1
/b
2
. The
equation was estimated with the 1950.1–2000.4 data in Appendix Table F5.2 that were used
in Example 20.1 (minus two quarters for the change in the rate of inflation). Least squares
estimates (with standard errors in parentheses) are as follows:
p
t
− p
t−1
= 0.49189 − 0.090136 u
t
+ e
t
(0.7405) (0.1257) R
2
= 0.002561, T = 202.
The implied estimate of the natural rate of unemployment is 5.46 percent, which is in line with
other recent estimates. The estimated asymptotic covariance of b
1
and b
2
is −0.08973. Using
the delta method, we obtain a standard error of 2.2062 for this estimate, so a confidence in-
terval for the natural rate is 5.46 percent ±1.96 ( 2.21 percent) = (1.13 percent, 9.79 percent)
(which seems fairly wide, but, again, whether it is reasonable to treat this as a parameter is at
least questionable). The regression of the least squares residuals on their past values gives a
slope of −0.4263 with a highly significant t ratio of −6.725. We thus conclude that the resid-
uals (and, apparently, the disturbances) in this model are highly negatively autocorrelated.
This is consistent with the striking pattern in Figure 20.3.
906
PART V
✦
Time Series and Macroeconometrics
1950
10
5
0
15
10
5
1963 1976
Quarter
Residual
Phillips Curve Deviations from Expected Inflation
1989 2002
FIGURE 20.3
Negatively Autocorrelated Residuals.
The problems for estimation and inference caused by autocorrelation are similar to
(although, unfortunately, more involved than) those caused by heteroscedasticity. As
before, least squares is inefficient, and inference based on the least squares estimates
is adversely affected. Depending on the underlying process, however, GLS and FGLS
estimators can be devised that circumvent these problems. There is one qualitative dif-
ference to be noted. In Section 20.13, we will examine models in which the generalized
regression model can be viewed as an extension of the regression model to the con-
ditional second moment of the dependent variable. In the case of autocorrelation, the
phenomenon arises in almost all cases from a misspecification of the model. Views differ
on how one should react to this failure of the classical assumptions, from a pragmatic
one that treats it as another “problem” in the data to an orthodox methodological view
that it represents a major specification issue—see, for example, “A Simple Message to
Autocorrelation Correctors: Don’t” [Mizon (1995).]
We should emphasize that the models we shall examine here are quite far removed
from the classical regression. The exact or small-sample properties of the estimators are
rarely known, and only their asymptotic properties have been derived.
20.2 THE ANALYSIS OF TIME-SERIES DATA
The treatment in this chapter will be the first structured analysis of time-series data in
the text. Time-series analysis requires some revision of the interpretation of both data
generation and sampling that we have maintained thus far.
CHAPTER 20
✦
Serial Correlation
907
A time-series model will typically describe the path of a variable y
t
in terms of
contemporaneous (and perhaps lagged) factors x
t
, disturbances (innovations), ε
t
, and
its own past, y
t−1
,....For example,
y
t
= β
1
+ β
2
x
t
+ β
3
y
t−1
+ ε
t
.
The time series is a single occurrence of a random event. For example, the quarterly
series on real output in the United States from 1950 to 2000 that we examined in Ex-
ample 20.1 is a single realization of a process, GDP
t
. The entire history over this period
constitutes a realization of the process. At least in economics, the process could not be
repeated. There is no counterpart to repeated sampling in a cross section or replication
of an experiment involving a time-series process in physics or engineering. Nonethe-
less, were circumstances different at the end of World War II, the observed history
could have been different. In principle, a completely different realization of the en-
tire series might have occurred. The sequence of observations, {y
t
}
t=∞
t=−∞
is a time-series
process, which is characterized by its time ordering and its systematic correlation be-
tween observations in the sequence. The signature characteristic of a time-series process
is that empirically, the data generating mechanism produces exactly one realization of
the sequence. Statistical results based on sampling characteristics concern not random
sampling from a population, but from distributions of statistics constructed from sets
of observations taken from this realization in a time window, t =1,...,T. Asymptotic
distribution theory in this context concerns behavior of statistics constructed from an
increasingly long window in this sequence.
The properties of y
t
as a random variable in a cross section are straightforward
and are conveniently summarized in a statement about its mean and variance or the
probability distribution generating y
t
. The statement is less obvious here. It is common
to assume that innovations are generated independently from one period to the next,
with the familiar assumptions
E [ε
t
] = 0,
Var[ε
t
] = σ
2
ε
,
and
Cov[ε
t
,ε
s
] = 0 for t = s.
In the current context, this distribution of ε
t
is said to be covariance stationary or
weakly stationary. Thus, although the substantive notion of “random sampling” must
be extended for the time series ε
t
, the mathematical results based on that notion apply
here. It can be said, for example, that ε
t
is generated by a time-series process whose
mean and variance are not changing over time. As such, by the method we will discuss
in this chapter, we could, at least in principle, obtain sample information and use it to
characterize the distribution of ε
t
. Could the same be said of y
t
? There is an obvious
difference between the series ε
t
and y
t
; observations on y
t
at different points in time
are necessarily correlated. Suppose that the y
t
series is weakly stationary and that, for
the moment, β
2
= 0. Then we could say that
E [y
t
] = β
1
+ β
3
E [y
t−1
] + E [ε
t
] = β
1
/(1 − β
3
)
and
Var[y
t
] = β
2
3
Var[y
t−1
] + Var[ε
t
],

908
PART V
✦
Time Series and Macroeconometrics
or
γ
0
= β
2
3
γ
0
+ σ
2
ε
,
so that
γ
0
=
σ
2
ε
1 − β
2
3
.
Thus, γ
0
, the variance of y
t
, is a fixed characteristic of the process generating y
t
. Note
how the stationarity assumption, which apparently includes |β
3
|< 1, has been used. The
assumption that |β
3
|< 1 is needed to ensure a finite and positive variance.
2
Finally, the
same results can be obtained for nonzero β
2
if it is further assumed that x
t
is a weakly
stationary series.
3
Alternatively, consider simply repeated substitution of lagged values into the ex-
pression for y
t
:
y
t
= β
1
+ β
3
(β
1
+ β
3
y
t−2
+ ε
t−1
) + ε
t
(20-1)
and so on. We see that, in fact, the current y
t
is an accumulation of the entire history of
the innovations, ε
t
. So if we wish to characterize the distribution of y
t
, then we might
do so in terms of sums of random variables. By continuing to substitute for y
t−2
, then
y
t−3
,...in (20-1), we obtain an explicit representation of this idea,
y
t
=
∞
i=0
β
i
3
(β
1
+ ε
t−i
).
Do sums that reach back into infinite past make any sense? We might view the
process as having begun generating data at some remote, effectively “infinite” past. As
long as distant observations become progressively less important, the extension to an
infinite past is merely a mathematical convenience. The diminishing importance of past
observations is implied by |β
3
|< 1. Notice that, not coincidentally, this requirement is
the same as that needed to solve for γ
0
in the preceding paragraphs. A second possibility
is to assume that the observation of this time series begins at some time 0 [with (x
0
,ε
0
)
called the initial conditions], by which time the underlying process has reached a state
such that the mean and variance of y
t
are not (or are no longer) changing over time. The
mathematics are slightly different, but we are led to the same characterization of the
random process generating y
t
. In fact, the same weak stationarity assumption ensures
both of them.
Except in very special cases, we would expect all the elements in the T component
random vector (y
1
,...,y
T
) to be correlated. In this instance, said correlation is called
“autocorrelation.” As such, the results pertaining to estimation with independent or
uncorrelated observations that we used in the previous chapters are no longer usable.
In point of fact, we have a sample of but one observation on the multivariate random
variable [y
t
, t = 1,...,T]. There is a counterpart to the cross-sectional notion of pa-
rameter estimation, but only under assumptions (e.g., weak stationarity) that establish
that parameters in the familiar sense even exist. Even with stationarity, it will emerge
2
The current literature in macroeconometrics and time series analysis is dominated by analysis of cases in
which β
3
= 1 (or counterparts in different models). We will return to this subject in Chapter 21.
3
See Section 20.4.1 on the stationarity assumption.