Gottstein G., Shvindlerman L.S. Grain Boundary Migration in Metals: Thermodynamics, Kinetics, Applications
Подождите немного. Документ загружается.


4.5 Experimental Investigations of Triple Junction Motion 355
σ
3
= 0.4
σ
10
4
10
3
10
2
10
1
10
0
σ
3
/
σ
= 0.4
365 370 375 380 385 390 395 400
T [°C]
Λ
γ
3
/
γ
= 0.4
σ
3
= 0.4
σ
10
4
10
3
10
2
10
1
10
0
σ
3
/
σ
= 0.4
365 370 375 380 385 390 395 400
T [°C]
Λ
γ
3
/
γ
= 0.4
FIGURE 4.16
Temperature dependence of the criterion Λ for a symmetrical triple junction
(sample S2).
σ
3
= 1
σ
340
10
4
10
3
10
2
10
1
Λ
10
0
350 360 370 380 390 400 410
T [°C]
σ
3
/
σ
= 1
γ
3
/
γ
= 1
σ
3
= 1
σ
340
10
4
10
3
10
2
10
1
Λ
10
0
350 360 370 380 390 400 410
T [°C]
σ
3
/
σ
= 1
γ
3
/
γ
= 1
FIGURE 4.17
Temperature dependence of the criterion Λ for an ideal triple junction (sample
S3).
© 2010 by Taylor and Francis Group, LLC
356 4 Thermodynamics and Kinetics of Connected Grain Boundaries
2θ
GB II
Grain 1
Grain 2
Grain 3
GB III
GB I
2θ
GB II
Grain 1
Grain 2
Grain 3
GB III
GB I
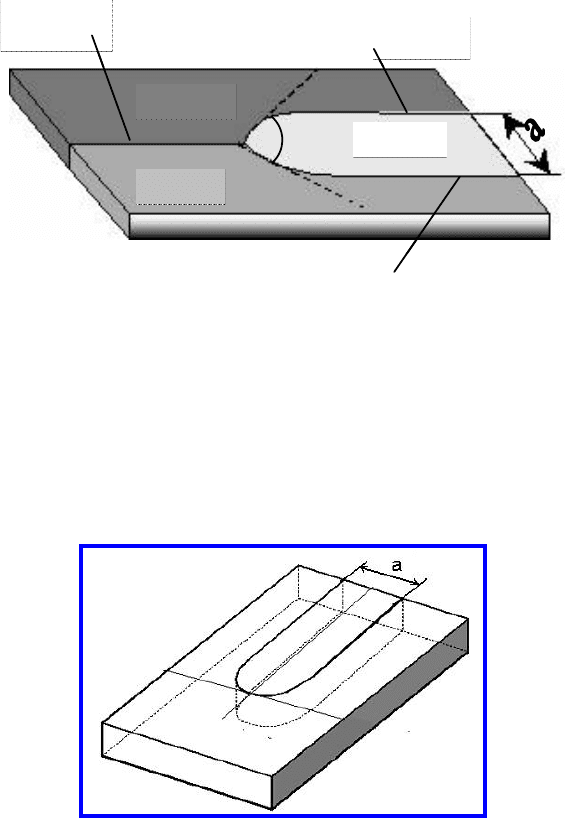
FIGURE 4.18
Geometry of grain boundary system with triple junction.
FIGURE 4.19
Geometry of a grain boundary half loop, i.e. the grain boundary system in
Fig. 4.18 without triple junction.
© 2010 by Taylor and Francis Group, LLC
4.5 Experimental Investigations of Triple Junction Motion 357
grain boundary system (Fig. 4.18) can be applied completely to a symmetrical
system, where grain boundaries I and II are the same, but different from the
rectilinear grain boundary III. This difference manifests itself in the relation
for the dimensionless criterion Λ and in the value of the equilibrium angle Θ
eq
Eqs. (4.44) and (4.45). The essential issue is the problem how to determine
Θ
eq
. In [434] this problem was treated by two methods. In the first method
one grain boundary system was stopped by notches near the triple junction;
it gave a possibility to measure Θ
eq
. An alternative way consists of using lit-
erature data of grain boundary surface tension in Al. In our case we used the
Read-Shockley equation to estimate the ratio between the surface tension of
low-angle and high-angle grain boundaries.
Two grain boundary systems were studied: a 11
¯
20 tilt boundary system
with 84
◦
misorientation of the curved boundaries (half-loop); the misorienta-
tion across the straight boundary was about 3
◦
. The second grain boundary
system was a system of 10
¯
10 tilt boundaries. The misorientation for the half-
loop was 62
◦
, the misorientation of straight boundary was also about 3
◦
.The
velocities and mobilities of the grain boundary systems for the two types of
motion were compared; i.e. in free motion — half-loop — and in constrained
motion — half-loop with triple junction. In the following the product of the
displacement of the grain boundary vertex and the width of the grain a, i.e.
a(t) will be referred to as reduced displacement.
In Fig. 4.20 the dependency of the reduced displacement a(t)ontimefora
grain boundary half-loop and a half-loop with a triple junction are presented.
Although half-loops (and half-loops with triple junction) of different width
were studied experimentally, the comparison of the product a(t)compen-
sates the discrepancy between the major parameter of driving force — the
width a. Strictly speaking, in the driving force for the half-loop and half-loop
with triple junction would be
2γ
a
and
2γ
a
−
γ
III
a
respectively, and should be
taken into consideration as well; however, since GBIII is a low-angle bound-
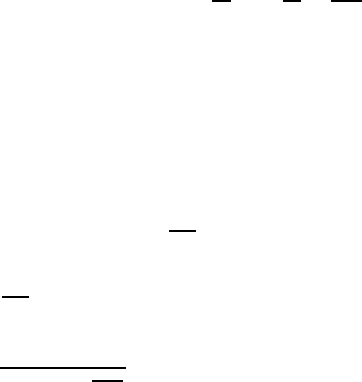
ary, we reason that such small correction may be disregarded. One can see,
the performed experiment brings out clearly that the triple junction strongly
drags grain boundary motion.
Let us consider the mobility of grain boundary and triple junction. Since
the exact value of γ, the grain boundary surface tension, is usually unknown it
is convenient to use the reduced mobility, A
b
and A
tj
, which can be expressed,
respectively, as
A
b
=
Va
π
= m
b
γ − for a half-loop (4.49)
A
b
=
Va
2Θ
= m
b
γ − for a grain boundary system with triple junction
(4.50)
A
tj
=
Va
2cosΘ−
γ
III
γ
− for a grain boundary system with triple junction
(4.51)
© 2010 by Taylor and Francis Group, LLC
358 4 Thermodynamics and Kinetics of Connected Grain Boundaries
0 50 100 150 200 250
time, sec
0.10
00
1.10
-07
2.10
-07
3.10
-07
4.10
-07
5.10
-07
a.l(t), m
2
0 50 100 150 200 250
time, sec
0.10
00
1.10
-07
2.10
-07
3.10
-07
4.10
-07
5.10
-07
a.l(t), m
2
FIGURE 4.20
Time dependence of reduced displacement a(t)for10
¯
10 tilt grain boundary
half-loop (solid circles) and triple junction configuration (solid squares) for
misorientation angle 62
◦
at T = 390
◦
C [434].
(Contrary to m
b
and m
tj
, the quantities A
b
and A
tj
havethesamedimen-
sion).
The temperature dependency of A
b
and A
tj
for system I and II is presented
in Figs. 4.21 and 4.22. It can be seen that the dependency can be subdivided
into two regions. The first one can be characterized by the relation A
tj
<A
b
.
In this region the motion of the system is controlled by the triple junction
mobility. The second region is defined by the relationship A
b
<A
tj
.Inthis
region the motion of a grain boundary system is determined by the grain
boundary mobility.
In Fig. 4.21 some experimental points that reflect the motion of a grain
boundary system with triple junction were recalculated according to the equa-
tion for boundary kinetics (Eq. 4.50). We are dealing with the points lying
above the intersection point with the line A
b
1
T
— mobility of the half-loop.
One can see that the recalculated points — open circles — are in good agree-
ment with the half-loop mobility (solid circles). It should be borne in mind
that the transition temperature between these two kinetics regimes might be
higher than the melting point. In such case the motion of the grain boundary
system will be governed by the triple junction mobility in the whole temper-
ature range.
The results obtained in the experiments on Zn tricrystals [434] were quali-
tatively confirmed by investigations on Al tricrystals [436], [437].
Since the mobility of grain boundaries in Al has been well investigated in
bicrystal experiments, such measurements permit a direct comparison of grain
© 2010 by Taylor and Francis Group, LLC
4.5 Experimental Investigations of Triple Junction Motion 359
1.46 1.48 1.5 1.52 1.54 1.56 1.58 1.6 1.62 1.64
10
-11
10
-10
10
-9
10
-8
III
A
b,
A
tj
[m
2
/s]
()
3
1/T 10 / K
−
1.46 1.48 1.5 1.52 1.54 1.56 1.58 1.6 1.62 1.64
10
-11
10
-10
10
-9
10
-8
III
A
b,
A
tj
[m
2
/s]
1.46 1.48 1.5 1.52 1.54 1.56 1.58 1.6 1.62 1.64
10
-11
10
-10
10
-9
10
-8
III
A
b,
A
tj
[m
2
/s]
()
3
1/T 10 / K
−
FIGURE 4.21
Temperature dependence of reduced grain boundary mobility A
b
(solid cir-
cles) and reduced triple junction mobility A
tj
(solid squares) for 10
¯
10 tilt
boundaries in Zn; the regions I and II are the regions of grain boundary and
triple junction kinetics, respectively [434].
1.4 1.5 1.6 1.7
10
-11
10
-10
10
-09
10
-08
A
b,
A
tj
[m
2
/s]
()
3
1/T 10 /K
−
1.4 1.5 1.6 1.7
10
-11
10
-10
10
-09
10
-08
A
b,
A
tj
[m
2
/s]
1.4 1.5 1.6 1.7
10
-11
10
-10
10
-09
10
-08
A
b,
A
tj
[m
2
/s]
()
3
1/T 10 /K
−
FIGURE 4.22
Temperature dependence of reduced grain boundary mobility A
b
(solid trian-
gles) and reduced triple junction mobility A
tj
(solid squares) for 11
¯
20 tilt
boundaries in Zn [434].
© 2010 by Taylor and Francis Group, LLC
360 4 Thermodynamics and Kinetics of Connected Grain Boundaries
boundary and triple junction properties. The experiments were carried out on
tricrystals of high purity (99,999%) aluminium with a grain boundary geom-
etry as shown in Fig. 4.18. The crystallographic characteristics of the studied
tricrystals are given in Table 4.2. The orientations of the three contiguous
grains of each sample were determined by the Laue technique and electron
back scatter diffraction (EBSD).
The motion of three grain boundaries systems with triple junctions (Ta-
TABLE 4.2
Misorientation of the Investigated
Tricrystals
Sample GB I GB II GB III
SI 21
◦
111 18
◦
111 3
◦
111
SII 27
◦
110 22
◦
110 5
◦
110
S III 44
◦
110 29
◦
110 15
◦
110
ble 4.2) was investigated in the temperature range between 400 and 590
◦
C
[436]. The investigated triple junctions consisted of two high-angle tilt grain
boundaries (GBI and GBII) and a low-angle tilt boundary (GB III). Due to
different properties of low-angle and high-angle grain boundaries and under
the assumption that the properties of high-angle grain boundaries vary only
little with changing misorientation, the investigated grain boundary systems
can be regarded as symmetrical junctions.
For all samples investigated the velocities V were found to remain constant
during an experiment at a given temperature over the entire investigated tem-
perature range. This supports the idea of a steady-state character of motion.
The angle Θ was seen to increase with increasing temperature (Table 4.3).
Due to the temperature dependence of Θ, the criterion Λ, determined by
Eqs (4.30) and (4.45), was found to increase with increasing temperature as
well. For a calculation of Λ for the motion of grain boundaries in sample SI
the ratio γ
III
/γ was determined under the assumption that for temperatures
near the melting point the value of Θ reaches the thermodynamic equilibrium
value
1
(Θ
eq
= arccos
γ
III
2γ
). The values of the ratio γ
III
/γ for all investi-
gated systems are given in Table 4.3.
The measured quantities in the current experiments were the migration
rate V of the grain boundary system with triple junction and the triple junc-
tion angle Θ. Using the measured values of Θ, the dimensionless parameter Λ
was calculated for each annealing temperature, and the temperature depen-
1
It is obvious that Θ → Θ
eq
when the kinetics of the system become grain boundary
controlled. In other words Θ
measured
∼
=
Θ
eq
can be expected near the melting point.
© 2010 by Taylor and Francis Group, LLC
4.5 Experimental Investigations of Triple Junction Motion 361
TABLE 4.3
Parameters of the Motion of Investigated Grain Boundary Systems with Triple
Junctions in Al Tricrystals [436]
Sample T
◦
CΘ Λ VA
b
A
tj
H
b
H
tj
m/s m
2
/s m
2
/s eV eV
398 58.5 2.6 0.58 · 10
−6
8.7 · 10
−10
SI 418 62 3.19 1.1 · 10
−6
2.0 · 10
−9
3.2
418 62 3.19 1.17 · 10
−6
2.5 · 10
−9
γ
3
γ
= 438 67 4.5 5.52 · 10
−6
2.8 · 10
−9
1.3 · 10
−8
=0.261 454 72.5 7.4 1.47 · 10
−5
7.0 · 10
−9
5.2 · 10
−8
1.4
459 78 16.6 6.4 · 10
−6
3.4 · 10
−9
5.7 · 10
−8
479 80 32.4 1.45 · 10
−5
7.6 · 10
−9
2.5 · 10
−8
479 55 2.2 5.8 · 10
−7
6.6 · 10
−10
SII 489 61.5 3.2 1.13 · 10
−6
1.7 · 10
−9
2.7
510 61.5 3.2 4.79 · 10
−6
6.0 · 10
−9
530 62 3.3 1.85 · 10
−5
7.4 · 10
−9
γ
3
γ
= 551 63.5 3.7 3.3 · 10
−5
1.4 · 10
−8
= 0.286 571 70 6.1 4.32 · 10
−5
1.9 · 10
−8
1.4
591 72 7.4
SIII 530 61.5 9.8 5.11 · 10
−7
2.7 · 10
−9
551 62 10.9 1.0 · 10
−5
5.3 · 10
−9
γ
3
γ
= 571 64 16.4 1.86 · 10
−5
9.8 · 10
−9
= 0.735 591 67 50.7 2.06 · 10
−6
9.4 · 10
−9
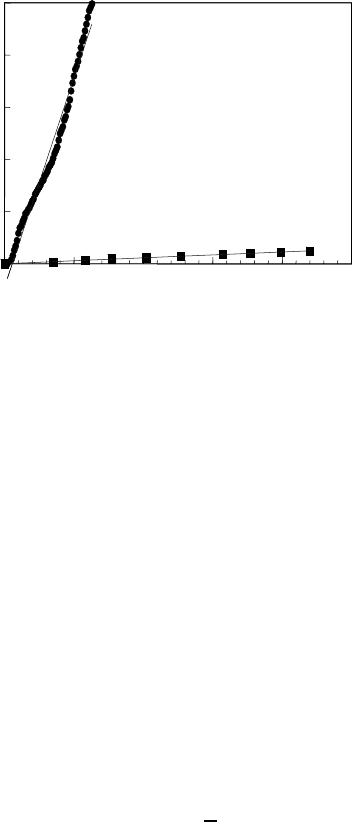
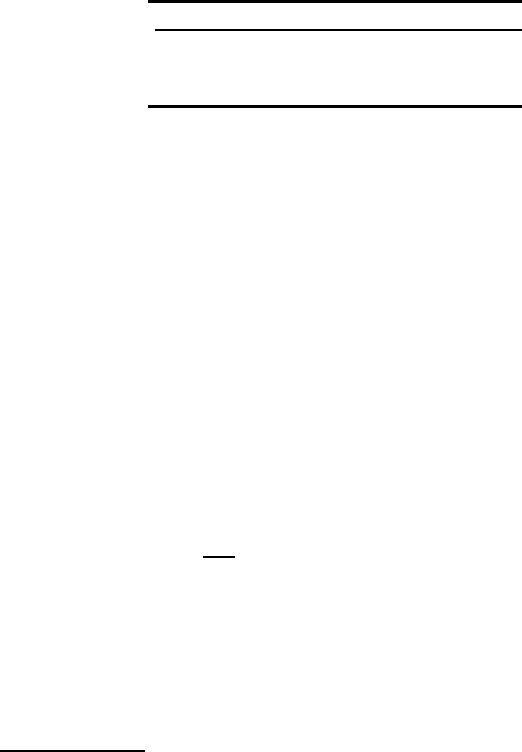
dency of Λ was determined. Fig. 4.23 shows this dependency for the samples
of type SI. According from the approach outlined above, at low temperatures,
where Λ is of the order of unity, the motion of the grain boundary system
is controlled by the mobility of the triple junction. A rise of Λ with increas-
ing temperature reflects the transition from triple junction to grain boundary
controlled motion of the grain boundary system. The technique used for mea-
suring the angle Θ raises the important question whether the angle measured
after the sample was cooled down corresponded to the real triple junction
angle at annealing temperature. There are two main factors, which may af-
fect the angle Θ: a thermodynamical influence, which reflects the temperature
dependence of the grain boundary surface tension, and a kinetic influence, de-
fined by the relation between grain boundary and triple junction mobilities
and the width of the vanishing grain a. The thermodynamical effect is negligi-
ble, since the boundary surface tension depends only slightly on temperature,
although how slightly is not exactly known. In any event, if the grain bound-
ary surface tensions and their temperature coefficients are comparable, then
the angle Θ should be essentially temperature independent. The kinetic factor
can really affect the magnitude of the angle Θ. Taking into account that triple
junction kinetics predominate at relatively low temperatures [436, 437], the
observed value of Θ may be reduced compared to the real angle at annealing
temperature. However, due to the strong temperature dependence of grain
© 2010 by Taylor and Francis Group, LLC
362 4 Thermodynamics and Kinetics of Connected Grain Boundaries
390 410 430 450 470 490
T [°C]
0
5
10
15
20
25
30
35
Λ
FIGURE 4.23
Temperature dependence of the criterion Λ for triple junctions in Al [436].
boundary mobility and the high cooling rate of the sample this change in the
real value of Θ is likely to be sufficiently small.
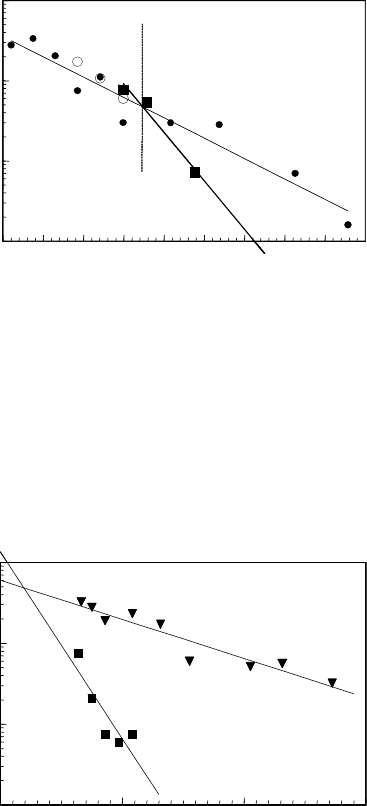
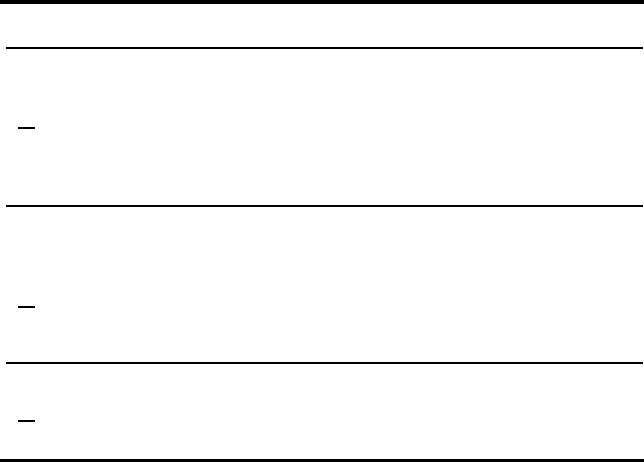
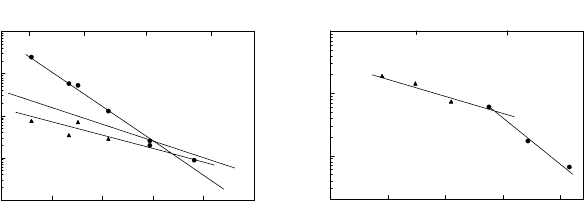
The reduced mobilities for grain boundaries and triple junctions are given
in Fig. 4.24 where the triangles represent the (reduced) grain boundary mo-
bility, whereas the circles denote the respective triple junction mobility. The
system is obviously controlled by the slowest moving constituent, i.e. the triple
junction at low temperatures and the grain boundary at high temperatures.
According to their respective linear behavior in the Arrhenius plot the activa-
tion enthalpy can be determined as indicated in the figure. Obviously, there
is a distinct transition from triple junction kinetics at low temperatures to
grain boundary kinetics at elevated temperatures, and the activation enthalpy
for triple junction motion H
tj
is considerably higher than for grain bound-
ary migration (H
b
). The behavior of the grain-boundary-controlled branch in
Fig. 4.24 compares well with measurements of the reduced grain boundary
mobility obtained from the data (see Chapter 3) of independent bicrystal ex-
periments. The corresponding evaluation for system SI is given in Fig. 4.24(a)
and yields comparable behavior.
We would like to stress two points. First, there is a transition tempera-
ture between two kinetic regimes, namely between grain boundary and junc-
tion regime. This transition temperature between these two kinetics regimes
might be either higher than the melting point, or a rather low temperature, in
particular lower than the temperature range of measurements. In this latter
case the motion of a grain boundary system will be governed by the grain
boundary mobility in the whole temperature range. One example is given in
Fig. 4.25. The measurements of grain boundary motion in the sample SIII
© 2010 by Taylor and Francis Group, LLC
4.5 Experimental Investigations of Triple Junction Motion 363
1.3 1.35 1.4 1.45 1.5 1.55
1/T [10
3
/K]
10
-10
10
-9
10
-8
10
-7
10
-6
A
[
m
2
/
s
]
T°C
390
450
420
480
H=3.2 eV
H=1.4 eV
1.14 1.19 1.24 1.29 1.34
1/T [10
3
/K]
10
-9
10
-8
10
-7
A
[
m
2
/
s
]
500
T°C
550
H=1.4 eV
H=2.7 eV
(a)
(b)
1.3 1.35 1.4 1.45 1.5 1.55
1/T [10
3
/K]
10
-10
10
-9
10
-8
10
-7
10
-6
A
[
m
2
/
s
]
T°C
390
450
420
480
H=3.2 eV
H=1.4 eV
1.14 1.19 1.24 1.29 1.34
1/T [10
3
/K]
10
-9
10
-8
10
-7
A
[
m
2
/
s
]
500
T°C
550
H=1.4 eV
H=2.7 eV
(a)
(b)
FIGURE 4.24
Temperature dependence of triple junction (• ) and grain boundary mobility
() in samples SI (a) and SII (b). Dotted line represents the mobility of
a21
◦
111 tilt boundary in Al as reconstructed from literature data (see
Chapter 3) (H =1.6eV; A
0
=10
3
m
2
/s) [436].
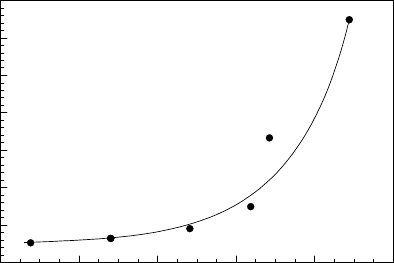
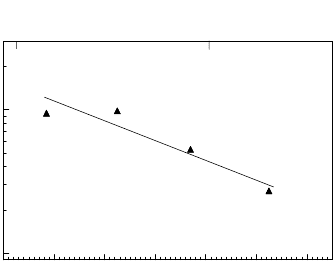
were performed at a relatively high temperature. The persistently higher val-
ues of Λ and the constant but comparatively low activation enthalpy in the
entire investigated temperature range (Fig. 4.25) indicate that the system
always moves in the boundary-controlled regime. Obviously, this has to be
attributed to the structure and property of the rectilinear grain boundary in
sample SIII which is practically a high-angle boundary contrary to the respec-
tive boundaries in the samples SI and SII, which are low-angle boundaries.
It is noteworthy that the motion of system SII, also consisting of 110 tilt
boundaries, in this temperature range is controlled by boundary motion as
well.
Further, we would like to draw the attention of the reader to the essen-
tial difference in the activation enthalpy of grain boundary and triple junc-
tion motion. The activation enthalpy of triple junction motion is much larger
than the respective quantity for grain boundaries. However, these data are
not enough to determine the kinetic regime which controls the motion of the
grain boundary system with a junction. The explanation for this phenomenon
can be provided on the basis of the compensation effect. The compensation
effect manifests itself in a linear dependence between the logarithm of the
pre-exponential factor and the enthalpy of activation in the mobility relation.
A comprehensive description of this effect is given in Chapter 3. It was shown
that the compensation effect can be derived in the framework of a first-order
phase transition between the equilibrium state and the metastable “activation
barrier” state. The temperature and pressure of compensation correspond to
the temperature and the pressure of equilibrium between the “barrier” and
ground state. Experimental data indicate also that the compensation tem-
perature is often close to the equilibrium temperature of a first-order phase
© 2010 by Taylor and Francis Group, LLC
364 4 Thermodynamics and Kinetics of Connected Grain Boundaries
1.14 1.16 1.18 1.2 1.22 1.24 1.26
1/T [10
3
/K]
10
-9
10
-8
A
[
m
2
/
s
]
550
600
T [°C]
H=1.3 eV
FIGURE 4.25
Temperature dependence of the reduced mobility of grain boundaries in sam-
ple SIII [436].
transformation in the bulk. As has been shown, the compensation effect rather
than the energy of activation or the pre-exponential factor individually con-
trols the kinetics of thermally activated interfacial processes. The results of
[437] where the motion of a rather large number of grain boundary systems
with triple junction in specially grown Al tricrystals was studied are very
useful to analyze this phenomenon. The crystallography and the kinetic pa-
rameters of grain boundaries and triple junctions investigated in [437] are
presented in Table 4.4. (Table 4.4 includes also some data listed in Table 4.2.)
Fig. 4.26 demonstrates the compensation effect for the mobility of grain
boundary systems with triple junction and individual tilt grain boundaries in
Al.
It is of interest to compare the transition temperature from triple junction
kinetics to grain boundary kinetics with the compensation temperature (Table
4.5). Apparently, the kinetic transition temperature compares to the compen-
sation temperature for all grain boundary systems with triple junctions, i.e.
is in accordance with the concept put forward in Sec. 3.7: the compensation
temperature is the equilibrium temperature between ground state and acti-
vated state. As shown in Sec. 3.7, this concept is supported by numerous
observations that the compensation temperature is close to the temperature
of a nearby phase transition. From the experimental data discussed above it
transpires that for the motion of a grain boundary system with triple junction
the compensation temperature coincides with the temperature of the kinetic
phase transition from the grain boundary regime to the junction regime.
In other words, the compensation temperature is the border between two
kinetic regimes: grain boundary kinetics and triple junction kinetics. Below
© 2010 by Taylor and Francis Group, LLC