Gockenbach M.S. Partial Differential Equations. Analytical and Numerical Methods
Подождите немного. Документ загружается.

we
see
that
We
now
take,
for
example,
v(x)
=
I
—
x/l,
which certainly belongs
to
V.
With this
choice
of
v,
(6.47)
becomes
268
Chapter
6.
Heat flow
and
diffusion
Now,
V C
V,
where
V is
defined
as the
space
of
test
functions
used
for a
Dirichlet
problem:
Therefore,
in
particular, (6.46) holds
for all v
e
V.
Since
the
boundary term
in
(6.46)
vanishes when
v(0)
=
v(t}
= 0, we
obtain
or
Using
the
same argument
as in
Section 5.4.2,
we see
that
must hold,
or
equivalently,
that
Thus,
if u
satisfies
the
weak
form
of the
BVP,
it
must
satisfy
at
least
the
differential
equation appearing
in the
strong
form.
It is now
easy
to
show
that
the
boundary conditions also hold.
The
condition
(6.46)
is
equivalent
to
and, since
we
have already shown
that
(since
v(0)
= 1,
v(i)
= 0).
Since
fc(0) > 0 by
assumption, this
can
hold only
if
268
Chapter
6.
Heat flow
and
diffusion
Now, V C
V,
where V
is
defined as
the
space of test functions used for a Dirichlet
problem:
V =
c1[0,
R]
=
{v
E V :
v(O)
=
v(R)
=
O}
.
Therefore, in particular, (6.46) holds for all v E V. Since the boundary term in
(6.46) vanishes when
v(O)
=
v(R)
= 0,
we
obtain
i
f d [ dU]
if
- 0
dx
k(x)
dx
(x)
vex)
dx
= 0
f(x)v(x)
dx
for all v E
V,
or
fat
{!
[k(X)
:~
(x)] +
f(X)}
vex)
dx
= 0 for all v E
V.
Using the same argument as in Section 5.4.2,
we
see
that
d [
du
]
dx
k(x)dx(x)
+f(x)
=0,
O<x<R
must hold, or equivalently,
that
d [
du
]
-
dx
k(x)
dx
(x) =
f(x),
0 < x <
£.
Thus, if U satisfies the weak form
of
the
BVP,
it
must satisfy
at
least
the
differential
equation appearing in the strong form.
It
is now easy
to
show
that
the boundary conditions also hold.
The
condition
(6.46)
is
equivalent
to
[
du
] i
rt
{ d [
dU]}
_
- k(x)
dx
(x)v(x) 0 +
10
dx
k(x)
dx
(x)
+
f(x)
vex)
dx
= 0 for all v E
V,
and, since
we
have already shown
that
d [
du
]
dx
k(x)
dx
(x)
+f(x)
=0,
O<x<R,
we
see
that
[
du
] i _
k(x)
dx
(x)v(x) 0 = 0 for all v E V.
(6.47)
We
now take, for example,
vex)
=
1-
x/R,
which certainly belongs to
V.
With
this
choice of
v, (6.47) becomes
-k(O):
(0)
= 0
(since
v(O)
=
1,
v(R)
= 0). Since
k(O)
> 0 by assumption, this can hold only if
du
dx
(0)
=
O.
6.5.
Finite
elements
and
Neumann conditions
269
must hold. Thus, when
u
satisfies
the
weak
form
(6.45),
it
must necessarily
satisfy
the
Neumann boundary conditions. This completes
the
proof
that
the
strong
and
weak
forms
of BVP
(6.44)
are
equivalent.
Figure
6.14.
The
piecewise
linear
basis
functions
</>o
and
(f)
n
.
Having
defined
the
approximating subspace
5
n
,
we
apply
the
Galerkin method
to the
weak
form
(6.45), yielding
the
problem
Similarly,
choosing
v(x)
=
x/i
shows
that
6.5.3
Piecewise
linear
finite
elements
with
Neumann
conditions
Now
that
we
have
the
weak
form
of the
BVP,
we
choose
the
appropriate subspace
of
piecewise linear
functions
and
apply
the
Galerkin technique
to
obtain
a finite
element
method. Since
no
boundary conditions
are
imposed
in the
weak
form,
we
augment
the
space
S
n
defined
in
Section
5.6 by
adding
the
basis
functions
</>o
and
0
n
(see Figure 6.14).
We
denote
the
resulting subspace
by
S
n
:
Sn — {p
'•
[Oj^j
—*•
R-
:
P is
continuous
and
piecewise
linear}
=
span{</>o,0i,...,0
n
}.
6.5. Finite elements
and
Neumann conditions
Similarly, choosing v(x) =
xli
shows
that
du
(i)
= 0
dx
269
must hold. Thus, when u satisfies
the
weak form (6.45),
it
must necessarily satisfy
the
Neumann boundary conditions. This completes
the
proof
that
the strong and
weak forms of
BVP
(6.44) are equivalent.
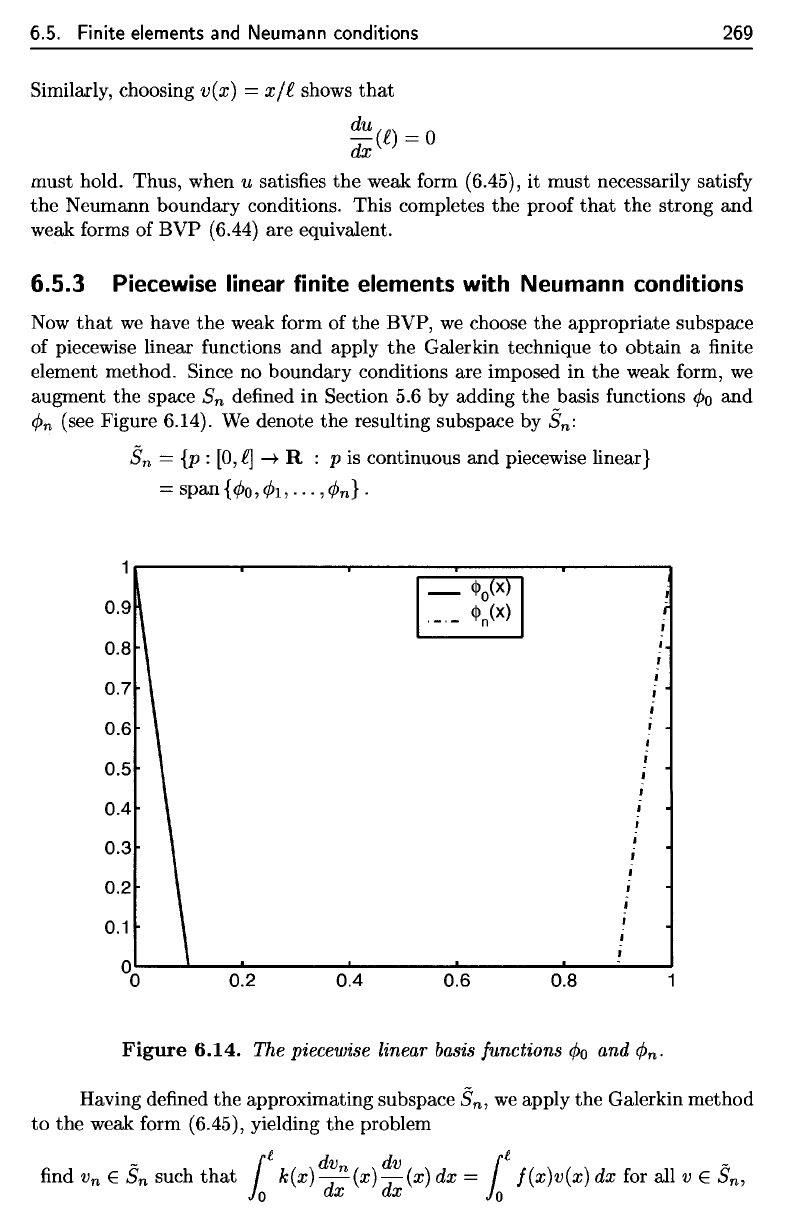
6.5.3 Piecewise linear finite elements with Neumann conditions
Now
that
we
have
the
weak form of the BVP,
we
choose
the
appropriate subspace
of piecewise linear functions and apply
the
Galerkin technique
to
obtain a finite
element method. Since no boundary conditions are imposed in
the
weak form,
we
augment the space Sn defined in Section 5.6 by adding
the
basis functions
4>0
and
4>n
(see Figure 6.14).
We
denote the resulting subspace by
Sn:
Sn = {p :
[0,
i]
-+
R : p
is
continuous and piecewise linear}
= span {
4>0,
4>1,
...
,
4>n}
.
0.9
~
._._
<pn(x)
0.8
0.7
\
0.6
0.5
,
i
0.4
,
,
0.3
0.2
0.1
\
,
,
00
0.2 0.4 0.6 0.8
,
j
!
,
,
,
Figure
6.14.
The piecewise linear
basis
functions
4>0
and
4>n.
Having defined
the
approximating subspace Sn,
we
apply the Galerkin method
to
the
weak form (6.45), yielding the problem
- r
l
dV
n
dv
r
l
-
find
Vn
E Sn such
that
10
k(x) dx (x) dx (x) dx =
10
f(x)v(x)
dx for all v E Sn,
270
Chapter
6.
Heat flow
and
diffusion
or,
equivalently,
For
simplicity
of
notation,
we
will
again write
so
that
(6.48)
can be
written
as
We
then write
the
unknown
v
n
as
and
substitute into (6.49).
The
result
is
This
is a
system
of
n
+ 1
equations
in the
n
+
I
unknowns
uo,ui,...,u
n
.
We can
write
the
system
as the
matrix-vector equation
Kii
= f by
defining
The
calculations involved
in
forming
the
matrix
K and the
vector
f are
exactly
the
same
as for a
Dirichlet problem, except
that
0
0
and
4>
n
are
qualitatively
different
from
0i,
02,...,
0n-i
(0o
and
0
n
are
each nonzero
on a
single subinterval, namely
[XQ,
Xi]
and
[x
n
_i,
x
n
],
respectively, while each
0j,
i =
1,2,...,
n
—
1, is
nonzero
on
[Xi-i,X
i+
i}}.
Having
now
reduced
the
problem
to the
linear system
Kii =
f,
where
now
K
6
R(n+i)x(n+i)
and
^
f
e
R
n+i
5
we
face
the
Difficulty
that
K is a
singular
matrix.
This
is not
surprising, since
we
know
that
the
original
BVP
(6.44) does
not
have
a
unique solution.
We can
show directly
that
K is
singular,
and
understand
the
nature
of the
singularity,
as
follows.
If
270
Chapter
6.
Heat flow
and
diffusion
or, equivalently,
find
Vn
E Sn such
that
lot
k(x)
~;
(x)
dx
i
(x) dx
=
10£
!(X)tPi(X) dx, i =
0,1,
...
, n.
(6.48)
For simplicity of notation,
we
will again write
(t
dv
dw
a(v,
w)
= io k(x) dx (x) dx (x) dx,
so
that
(6.48) can be written as
We
then
write
the
unknown
Vn
as
n
Vn
=
LUjtPj
j=O
and
substitute into (6.49).
The
result
is
n
La(tPj,tPi)Uj = (J,tPi), i
=O,l,
...
,n.
i=O
(6.49)
This is a system of
n + 1 equations in
the
n + 1 unknowns
uo,
UI,
...
,
Un.
We
can
write
the
system as
the
matrix-vector equation
Kii
= f by defining
Kij =
a(tPj,
tPi),
i,j
=
0,1,
...
, n,
ii
= (J,tPi)' i =
O,l,
...
,n.
The
calculations involved in forming
the
matrix
K
and
the
vector f are exactly
the
same as for a Dirichlet problem, except
that
tPo
and
tPn
are qualitatively different
from
tPI,
tP2,
...
,
tPn-1
(tPo
and
tPn
are each nonzero on a single subinterval, namely
[xo,
Xl]
and
[Xn-l,
xn],
respectively, while each
tPi,
i = 1,2,
...
, n -
1,
is nonzero on
[Xi-I,
Xi+l]).
Having now reduced
the
problem
to
the
linear system
Kii
=
f,
where now
K E
R(n+1)x
(n+1)
and
ii, f E
Rn+1,
we
face
the
difficulty
that
K is a singular
matrix. This
is
not
surprising, since
we
know
that
the original
BVP
(6.44) does not
have a unique solution.
We
can show directly
that
K is singular, and understand
the
nature
of
the
singularity, as follows.
If
6.5.
Finite
elements
and
Neumann
conditions
271
then
is
piecewise linear
and has
value
one at
each mesh node.
It
follows
that
(6.50)
is
the
constant
function
one,
and
hence
has
derivative zero. Therefore
(Ku
c
)j
= 0 for
each
ij
which shows
that
Ku
c
= 0 and
hence
that
K is
singular. Moreover,
it can
be
shown
that
u
c
spans
the
null space
of K;
that
is, if
Ku
= 0,
then
u
is a
multiple
of
u
c
(see Exercise
5].
The
fact
that
K is
singular means
that
we
must give special
attention
to the
process
of
solving
Ku = f. In
particular,
if we
ignore
the
singularity
of K and
solve
Kii = f
using computer software,
we
will
get
either
a
meaningless solution
or
an
error message.
To
solve this singular system correctly,
we
must
add
another
equation (one additional equation, correctly chosen,
will
be
sufficient,
because
the
null
space
of K is
one-dimensional).
A
simple choice
is the
equation
u
n
= 0;
this
is
equivalent
to
choosing,
out of the
infinitely
many solutions
to
(6.44),
the one
with
u(i]
— 0.
Moreover,
we can
impose this additional equation
by
simply removing
the
last
row and
column
from
K, and the
last
entry
from
f.
The
last
column
of K
consists
of the
coefficients
of the
terms
in the
equations involving
u
n
;
if we
insist
that
u
n
= 0,
then
we can
remove these terms
from
all n + 1
equations.
We
then
have
n
+
l
equations
in the n
unknowns
WQ,
Wi,...,
w
n
_i.
This
is one
more equation
than
we
need,
so we
remove
one
equation,
the
last,
to
obtain
a
square system.
It
can be
proved
that
the
resulting
n x n
system
is
nonsingular (see Exercise
11).
Of
course,
we
could have removed
a
different
row and
column.
If we
remove
the
iih
row and
column,
we are
selecting
the
approximate solution
v
n
satisfying
V
n
(Xi)
= 0.
Example
6.10. Consider
the
Neumann problem
It is
easy
to
show
(by
direct
integration) that
But
6.5. Finite elements
and
Neumann conditions 271
then
But
(6.50)
j=O
is piecewise linear and has value one
at
each mesh node.
It
follows
that
(6.50)
is
the
constant function one, and hence has derivative zero. Therefore
CKUe)i
= 0 for
each
i,
which shows
that
KU
e
= 0 and hence
that
K
is
singular. Moreover,
it
can
be shown
that
U
e
spans
the
null space of
K;
that
is, if
Kii
=
0,
then
ii
is
a multiple
of
U
e
(see Exercise
5}
The
fact
that
K
is
singular means
that
we
must give special attention to the
process of solving
Kii
=
f.
In particular, if
we
ignore the singularity of K and
solve
Kii
= f using computer software,
we
will get either a meaningless solution
or
an
error message. To solve this singular system correctly,
we
must add another
equation (one additional equation, correctly chosen, will be sufficient, because the
null space of
K
is
one-dimensional). A simple choice
is
the equation
Un
=
0;
this
is
equivalent
to
choosing, out of
the
infinitely many solutions
to
(6.44), the one with
u(C)
=
O.
Moreover,
we
can
i~pose
this additional equation by simply removing;
the last row and column from
K,
and the last entry from
f.
The last column of K
consists of
the
coefficients of the terms in
the
equations involving
un;
if
we
insist
that
Un
= 0,
then
we
can remove these terms from all n + 1 equations.
We
then
have
n + 1 equations in the n unknowns
uo,
ut,
... ,
Un-l.
This
is
one more equation
than
we
need,
so
we
remove one equation, the last,
to
obtain a square system.
It
can be proved
that
the resulting n x n system
is
nonsingular (see Exercise 11).
Of course,
we
could have removed a different row and column.
If
we
remove
the
ith
row and column,
we
are selecting the approximate solution
Vn
satisfying
Vn(Xi)
=
O.
Example
6.10.
Consider the Neumann problem
d
2
u 1
--
= x - - 0 < x < 1
dX2
2'
,
~:
(0)
=
0,
(6.51 )
~:
(1) = 0.
It
is
easy
to
show (by direct integration) that
X3 X2
u(x) =
-"6
+
4"
+ C
272
Chapter
6.
Heat flow
and
diffusion
is
a
solution
for any
constant
C,
and
that
is
the
solution
satisfying
u(l)
= 0.
We
will
use a
regular grid with
the finite
element method.
We
define
xi
= ih,
i =
0,1,...,n,
h —
l/n.
With piecewise linear
finite
elements,
as we
have seen
before,
the
stiffness
matrix
K is
tridiagonal since
Since
K is
symmetric
and
tridiagonal, this completes
the
computation
ofK.
Next,
we
have
We
compute
as
follows
(as
suggested
above,
the
computations involving
<^o
and
(f)
n
must
be
handled separately from those involving
</»i,
^2,
• •
•,
(f>n-i)-'
272
Chapter
6.
Heat flow
and
diffusion
is a solution for any constant C, and that
x
3
x
2
1
u(x)
=
--
+ -
--
6 4 12
is the solution satisfying
u(l)
= 0.
We will use a regular grid with the finite element method. We define
Xi
=
ih,
i =
0,1,
...
,
n,
h =
lin.
With piecewise linear finite elements,
as
we
have seen
before, the stiffness matrix K is tridiagonal since
Ii -
il
> 1
:::}
ixi
(x)
a:;
(x) = ° on (0,
f).
We compute
as
follows (as suggested above, the computations involving
CPo
and
CPn
must
be
handled separately from those involving
CPl,
CP2,
...
,
CPn-l):
-
..
_l(Hl)h
(dCPi
) 2
_l(Hl)h
~
_
~
K .. - d (x)
dx-
h
2dx
-
h'
i=1,2,
...
,n-1,
(i-l)h x (i-l)h
- r
h
(dCPO
) 2
tIl
Koo
=
io
dx (x) dx =
io
h2
dx =
h'
_
/1
(dCPn
) 2
/1
1 1
Knn
=
I-h
dx (x)
dx
=
I-h
h2
dx
=
h'
-
l(i+1)h
dCPi
dCPHI
l(i+1)h
(
1)
K
i
,i+l =
-(x)--(x)dx
=
-2"
dx
ih
dx
dx
ih
h
1 .
= -
h'
Z = 0, 1,
...
, n -
l.
Since K is symmetric and tridiagonal, this completes the computation
of
K.
Next,
we
have
h =
l(HI)h
(x
-
~)
CPi(X)
dx
(i-I)h 2
=
lih
(x
_
~)
(x
- (i -
l)h)
dx
(i-I)h 2 h
+
I~HI)h
(x
_
~)
(1
_ x
~
ih)
dx
= ih2 -
~
4'
io
=
Io
h
(x
-
~)
(1
-
~)
dx
h
2
h
6-4'
in=
!~h(x-~)X-(~-h)dX
h h
2
---
4 6
6.5.
Finite
elements
and
Neumann
conditions
273
As
suggested
above,
we
compute
a
solution
u
to
Ku
= f by
removing
the
last
row
and
column from
K
and the
last component from
f,
and
solving
the
resulting square,
nonsingular system.
The
result,
for n = 10, is
shown
in
Figure 6.15.
Figure
6.15.
The
exact
and
computed solution (top)
and the
error
in
the
computed solution (bottom)
for
(6.51).
The
computed solution
was
found using
piecewise
linear
finite
elements with
a
regular
grid
of 10
subintervals.
6.5.4
Inhomogeneous
Neumann conditions
The
finite
element method requires only minor modifications
to
handle
the
inhomo-
geneous
Neumann problem
In
deriving
the
weak
form
of the
BVP,
the
boundary
terms
from
the
integration
by
parts
do not
vanish:
6.5. Finite elements
and
Neumann conditions
273
As
suggested
above,
we
compute a solution
ii
to
Kii
= f
by
removing the last row
and column from
K and the last component from
f,
and solving the resulting square,
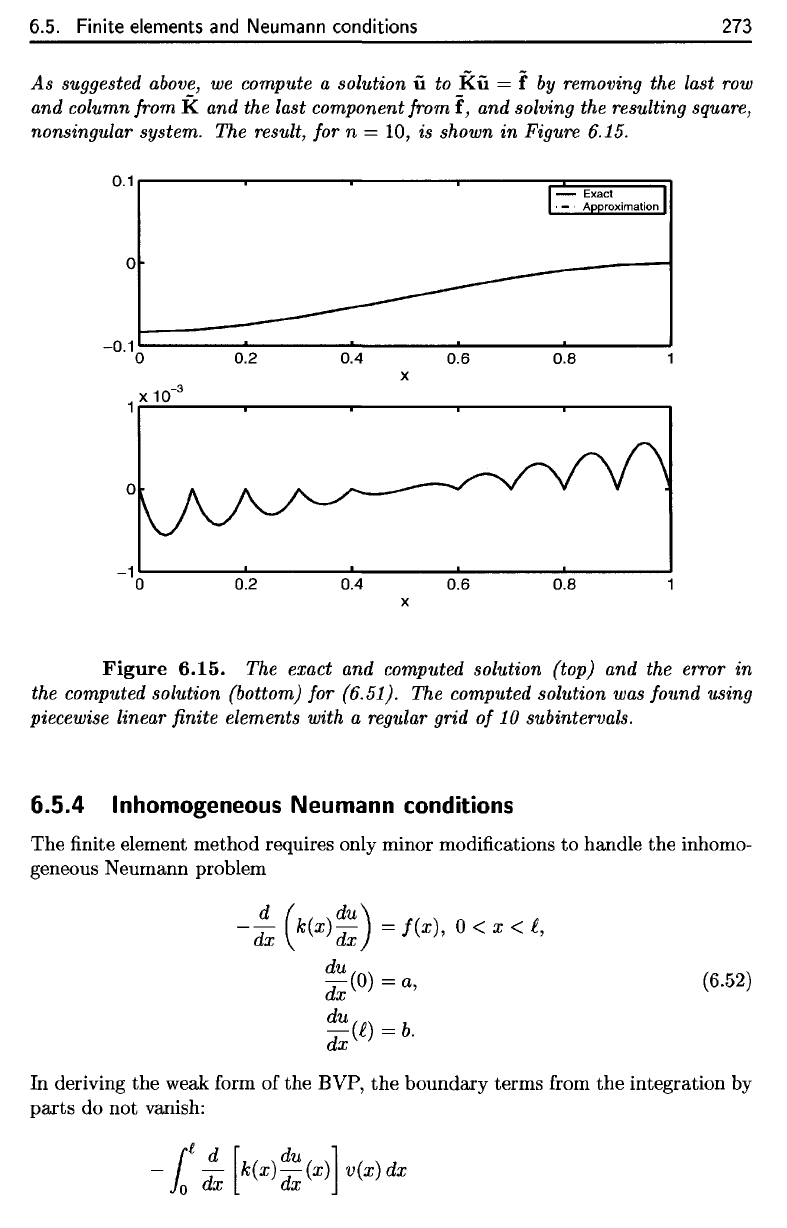
nonsingular system. The result, for n = 10, is shown in Figure 6.15.
0.1
r----r-----"T"""""---....---,=:::;;::;;:::=:::;,
o
-0.1~------~--------~------~--------~------~
o
-3
1 x
10
0.2 0.4 0.6 0.8
x
-1~---~---~---~----~--~
o
0.2 0.4 0.6 0.8
x
Figure
6.15.
The exact and computed solution (top) and the error in
the computed solution (bottom) for
(6.
51}.
The computed solution was found using
piecewise linear finite elements with a regular grid
of
10 subintervals.
6.5.4 Inhomogeneous Neumann conditions
The
finite element method requires only minor modifications
to
handle
the
inhomo-
geneous Neumann problem
d (
dU)
- dx
k(x)dx
=f(x),o<x<i!,
du
dx
(0)
=
a,
(6.52)
~~
(f) =
b.
In deriving
the
weak form of
the
BVP,
the
boundary terms from
the
integration by
parts
do
not
vanish:
r£
d [ du ]
-
io
dx k(x) dx (x) v(x) dx
274
Chapter
6.
Heat flow
and
diffusion
The
weak form becomes
When
we
apply
the
Galerkin
method,
we end up
with
a
slightly
different
right-
hand-side
vector
f.
We
have
Example 6.11.
We now
apply
the finite
element method
to the
inhomogeneous
Neumann
problem
The
exact solution
is
(again
choosing
the
solution with
u(l]
=
Q).
The
calculations
are
exactly
the
same
as
for
Example
6.10,
except that
the first and
last components
of f are
altered
as
given
in
(6.54)-
We
therefore
have
The
results
are
shown,
for
n
= 10, in
Figure
6.16.
6.5.5
The
finite element method
for an
IBVP
with Neumann
conditions
We
now
briefly consider
the
following
IBVP:
274
Chapter
6.
Heat flow
and
diffusion
The
weak form becomes
find u E V such
that
a(u,
v)
=
(f,
v)
+
k(R)v(R)b
-
k(O)v(O)a
for all v E
V.
(6.53)
When
we apply
the
Galerkin method, we end
up
with a slightly different right-
hand-side vector
f.
We
have
ii
=
(f,
rPi)
+
k(R)rPi(R)b
-
k(O)rPi(O)a
_ {
(f,
rP~)'
~
::
1,2,
....
, n - 1
~ince
rPi(R~
=
rPi(O)
= 0),
-
(f,
rP~)
-
k(O)a,
~
- 0 (smce
rPo(R)
- 0,
rPo(O)
- 1),
(f,
rPi)
+
k(R)b,
i = n (since
rPn(R)
=
1,
rPn(O)
= 0).
(6.54)
Example
6.11.
We now apply the finite element method to the inhomogeneous
Neumann
problem
The exact solution is
d
2
u 1
-
dx
2
= X -
2'
0 < x < 1,
du
(0)
=
1,
dx
dU(l) =
1.
dx
x
3
x
2
13
u(x)
=
-6
+
'4
+x
-
12
(6.55)
(again choosing the solution with
u(l)
= 0). The calculations
are
exactly the same
as
for Example 6.10, except that the first and last components
of
f
are
altered
as
given
in
(6.54). We therefore have
- h
2
h - h h
2
fo
= 6 - 4 - 1, fn = 4 - 6 +
1.
The results
are
shown, for n = 10,
in
Figure 6.16.
6.5.5 The finite element method
for
an
IBVP with Neumann
conditions
We now briefly consider
the
following IBVP:
au
a
2
u
pc
at -
'"
ax
2
=
f(x,
t), 0 < x <
R,
t>
to,
6.5.
Finite
elements
and
Neumann
conditions
275
Figure
6.16.
The
exact
and
computed
solution
(top)
and the
error
in
the
computed
solution (bottom)
for
(6.55).
The
computed
solution
was
found
using
piecewise
linear
finite
elements with
a
regular
grid
of 10
subintervals.
Finite element methods
for.
the
heat equation with Neumann conditions
are
derived
as in
Section
6.4.
The
following
differences
arise:
• In the
derivation
of the
weak
form
of the
IBVP,
the
space
V of
test
functions
is
replaced
by
V.
•
When
the
Galerkin method
is
applied,
the
approximating subspace
S
n
is re-
placed
by
S
n
.
• The
mass matrix
M
e
R(
n
-
1
)
x
(
n
-
1
),
stiffness
matrix
K €
RC
11
-
1
)^"-
1
),
and
load
vector
f(t)
G
R
11
"
1
are
replaced
by M €
R(n+i)x(n+i)
?
£
e
R(n+i)x(n+i)
}
and
f(t)
G
R
n+1
,
respectively.
The new
stiffness
matrix
K was
derived
in
Sec-
tion 6.5.3,
and the new
form
of the
mass matrix,
M, is
derived analogously.
In
contrast
to the
case
of a
steady-state
BVP,
the
singularity
of the
matrix
K
causes
no
particular problem
in an
IBVP, since
we are not
required
to
solve
a
linear system
whose
coefficient
matrix
is K.
6.5. Finite elements
and
Neumann conditions 275
_1.51-
___
-'-
___
---'
.......
___
-'-
___
--L
___
--J
o
0.2
0.4
0.6 0.8
x
_1~------~---------L--
______
~
________
~
______
~
o
0.2
0.4 0.6
0.8
x
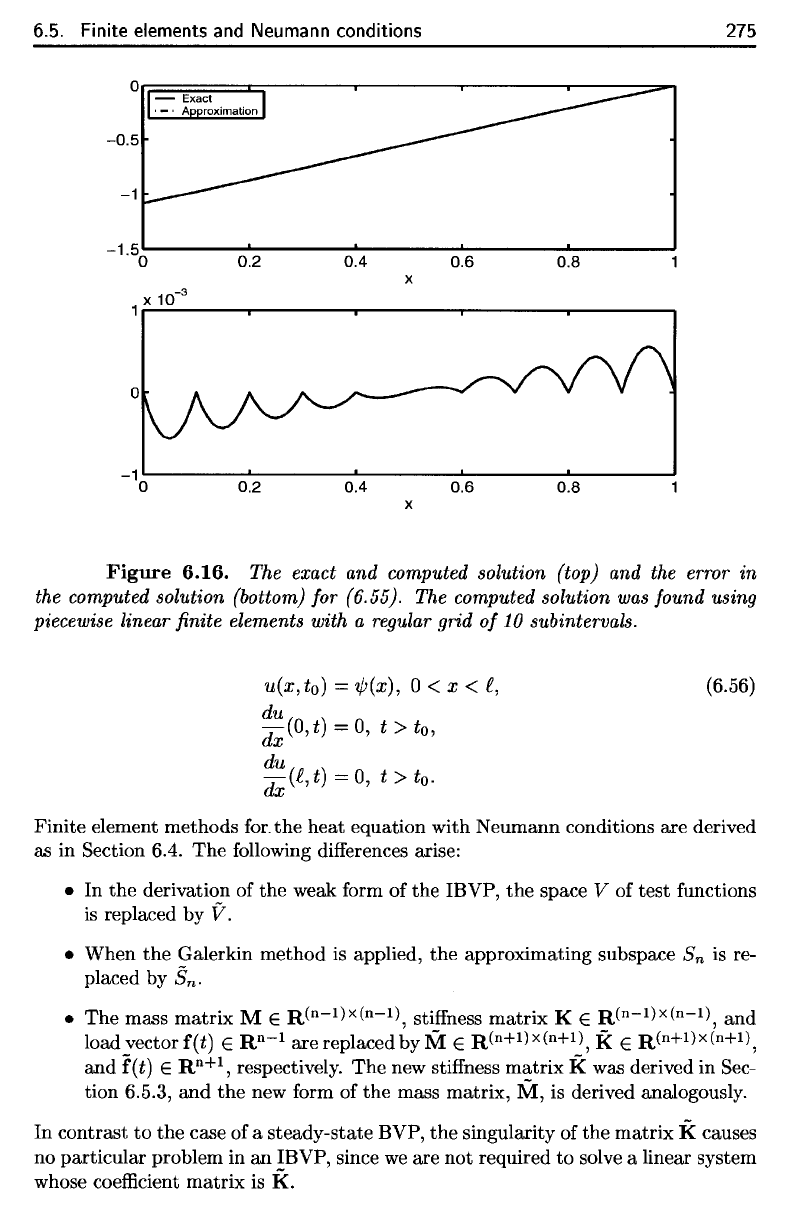
Figure
6.16.
The exact and computed solution {top} and the error in
the computed solution {bottom} for
{6.55}.
The computed solution
was
found using
piecewise linear finite elements with a regular grid
of
10 subintervals.
u(x, to) =
'l/J(x),
0<
x <
e,
du
dx
(0, t) = 0, t > to,
du
dx
(e,
t) = 0, t > to·
(6.56)
Finite element methods
for.
the
heat equation with Neumann conditions are derived
as in Section 6.4.
The
following differences arise:
• In
the
derivation of the weak form of the IBVP,
the
space V of test functions
is
replaced by if.
• When
the
Galerkin method is applied,
the
approximating subspace Sn is re-
placed by
Sn.
•
The
mass matrix M E
R(n-l)x(n-l),
stiffness
matrix
K E
R(n-l)x(n-l),
and
load vector f(t) E
Rn-l
are replaced by
ME
R(n+l)
x
(n+l)
,K
E
R(n+1)x
(n+1)
,
and f(t) E
Rn+l,
respectively.
The
new stiffness matrix K was derived in Sec-
tion 6.5.3,
and
the
new form of
the
mass matrix,
M,
is derived analogously.
In
contrast
to
the
case of a steady-state BVP,
the
singularity of
the
matrix
K causes
no particular problem in
an
IBVP, since
we
are not required
to
solve a linear system
whose coefficient matrix is
K.
276
Chapter
6.
Heat
flow
and
diffusion
Moreover,
the
source
function
f(x,t)
is not
required
to
satisfy
a
compatibility
condition
in
order
for
(6.56)
to
have
a
solution. Physically, this makes sense. Think-
ing
of
heat
flow, for
example,
the
temperature distribution
is in
general changing,
so
there
is no
inconsistency
in
having
a net
gain
or
loss
of
total
heat
energy
in the
bar.
On the
other hand,
for the
steady-state
case,
the
temperature could
not be
independent
of
time
if the
total
amount
of
heat
energy
in the bar
were
changing
with
time.
This
can
also
be
seen directly.
If u is the
solution
of
(6.56),
then
This
last
expression
is
(proportional
to) the
time
rate
of
change
of the
total
heal
energy contained
in the bar
(see (2.2)
in
Section 2.1).
We
leave
the
detailed formulation
of a
piecewise linear
finite
element
method
for
(6.56)
to the
exercises (see Exercise
6).
Exercises
1.
Consider
an
aluminum
bar of
length
1 m and
radius
1 cm.
Suppose
that
the
sides
and
ends
of the bar are
perfectly
insulated,
and
heat energy
is
added
to
the
interior
of the bar at a
rate
of
(x
is
given
in
centimeters,
and the
usual coordinate system
is
used).
The
thermal conductivity
of the
aluminum alloy
is
1.5W/(cmK).
Find
and
graph
the
steady-state
temperature
of the
bar.
Use the finite
element method.
2.
Repeat
the
previous exercise, except
now
assume
that
the bar is
heteroge-
neous,
with thermal conductivity
3.
Consider
a
copper
bar
(thermal conductivity 4.04
W/(cm
K)) of
length
100 cm.
Suppose
that
heat
energy
is
added
to the
interior
of the bar at the
constant
276
Chapter
6.
Heat flow
and
diffusion
Moreover, the source function
I(x,
t) is not required
to
satisfy a compatibility
condition in order for (6.56) to have a solution. Physically, this makes sense. Think-
ing of
heat
flow,
for example, the temperature distribution
is
in general changing,
so there
is
no inconsistency in having a
net
gain or loss of
total
heat energy in
the
bar. On
the
other hand, for the steady-state case, the temperature could not be
independent of time
if
the
total
amount of heat energy in the bar were changing
with time.
This can also
be
seen directly.
If
u is
the
solution of (6.56),
then
fof
I(x,
t) dx = fof
pc
~~
(x,
t)
dx
_fof
~
~:~
(x, t) dx
I
f
au
[au]e
=
pC-
a
(x, t) dx -
~-a
(x, t)
o t x
x=o
= fof
pc
~~
(x, t) dx -
~
(~~
(C,
t)
-
~~
(0,
t))
=
foe
pc
~~
(x, t) dx (by
the
Neumann conditions)
=
%t
[fof pcu(x, t)
dx].
This last expression
is
(proportional to) the time
rate
of change of the
total
heat
energy contained in the
bar
(see (2.2) in Section 2.1).
We
leave the detailed formulation of a piecewise linear finite element method
for (6.56)
to
the exercises (see Exercise 6).
Exercises
1.
Consider
an
aluminum
bar
of length 1 m
and
radius 1 cm. Suppose
that
the
sides
and
ends of the
bar
are perfectly insulated, and heat energy
is
added
to
the interior of the
bar
at
a
rate
of
1
I(x)
=
10-
7
x(25 - x) (100 - x) +
240
W
/cm
3
(x
is
given in centimeters,
and
the usual coordinate system
is
used).
The
thermal conductivity
ofthe
aluminum alloy
is
1.5 W / (cm K). Find and graph
the
steady-state temperature of the bar. Use the finite element method.
2.
Repeat the previous exercise, except now assume
that
the
bar
is
heteroge-
neous, with thermal conductivity
~(x)
= 1.0 +
(1~0)
2
3. Consider a copper
bar
(thermal conductivity 4.04 W / (cm K)) oflength 100 cm.
Suppose
that
heat energy
is
added to the interior of the
bar
at
the
constant
6.5.
Finite
elements
and
Neumann
conditions
277
rate
of
f(x)
=
0.005
W/cm
3
,
and
that
heat energy
is
added
to the
left
end
(x
= 0) of the bar at the
rate
of
0.01
W/cm
2
.
(a)
At
what
rate
must
heat
energy
be
removed
from
the
right
end (x =
100)
in
order
that
a
steady-state
solution exist? (See Exercise
6.2.5a,
or
just
use
common
sense.)
(b)
Formulate
the BVP
leading
to a
steady-state solution,
and
approximate
the
solution using
the
finite
element method.
4.
Suppose
that,
in the
Neumann problem
(6.44),
/
does
not
satisfy
the
com-
patibility condition
Suppose
we
just ignore this fact
and try to
apply
the
finite
element method
anyway. Where does
the
method break down? Illustrate with
the
Neumann
problem
5.
The
purpose
of
this exercise
is to
provide
a
sketch
of the
proof
that
the
null
space
of K is
spanned
by
u
c
,
where
K is the
stiffness
matrix arising
in a
Neumann problem
and
u
c
is the
vector with each component equal
to
one.
(a)
Suppose
Ku = 0,
where
the
components
of u are
UQ,
ui,...,
u
n
.
Show
that
this implies
that
a(v,v)
=0,
where
(Hint:
Compute
u •
Ku.)
(b)
Explain
why
a(v,
v) = 0
implies
that
v is a
constant function.
(c)
Now
explain
why Ku = 0
implies
that
u is a
multiple
of
u
c
.
6. (a)
Formulate
the
weak
form
of
(6.56).
(b)
Show
how to use
piecewise linear
finite
elements
and the
method
of
lines
to
reduce
the
weak
form
to a
system
of
ODEs.
(c)
Using
the
backward
Euler
method
for the
time integration, estimate
the
solution
of the
IBVP
6.5. Finite elements
and
Neumann conditions
277
rate
of
f(x)
=
0.005W/cm
3
,
and
that
heat energy is added
to
the
left end
(x =
0)
of
the
bar
at
the
rate
of 0.01
W/cm
2
.
(a) At what
rate
must heat energy be removed from
the
right end
(x
= 100)
in order
that
a steady-state solution exist? (See Exercise 6.2.5a, or
just
use common sense.)
(b) Formulate
the
BVP
leading
to
a steady-state solution,
and
approximate
the
solution using
the
finite element method.
4.
Suppose
that,
in
the
Neumann problem (6.44), f does
not
satisfy
the
com-
patibility condition
f-
lo
f(x)dx
=
o.
Suppose
we
just
ignore this fact
and
try
to
apply
the
finite element method
anyway. Where does
the
method break down? illustrate with
the
Neumann
problem
d
2
u
- dx
2
= x,
~~(O)
=
0,
~~(1)
=0.
O<x<l
5.
The
purpose of this exercise
is
to
provide a sketch of
the
proof
that
the
null
space of
K is spanned by U
c
,
where K
is
the
stiffness
matrix
arising in a
Neumann problem
and
U
c
is
the
vector with each component equal
to
one.
(a) Suppose
Ku
=
0,
where
the
components of u are
UO,Ul,
..•
,Un.
Show
that
this implies
that
a(
v,
v)
=
0,
where
(Hint: Compute
U·
Ku.)
n
V = L
Ui¢>i·
i=O
(b) Explain why a( v, v) = 0 implies
that
v
is
a constant function.
(c) Now explain why
Ku
= 0 implies
that
u is a multiple of U
c
•
6.
(a) Formulate
the
weak form of (6.56).
(b) Show how
to
use piecewise linear finite elements
and
the
method of lines
to
reduce
the
weak form
to
a system of ODEs.
(
c)
Using
the
backward Euler method for
the
time integration, estimate
the
solution of
the
IBVP
au
_ a
2
u = 0
at
ax2 ' 0
<.x
<
1,
t >
0,