Gockenbach M.S. Partial Differential Equations. Analytical and Numerical Methods
Подождите немного. Документ загружается.

168
Chapter
5.
Boundary value problems
in
statics
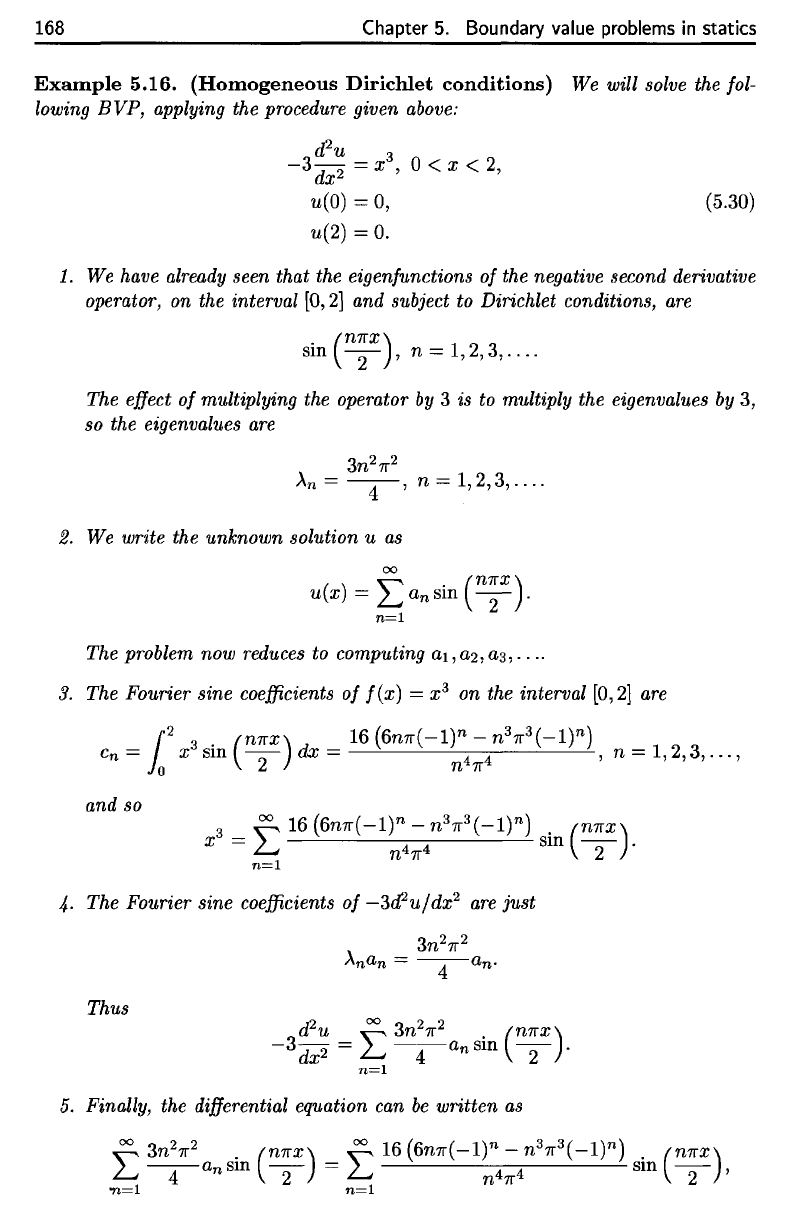
Example 5.16. (Homogeneous Dirichlet conditions)
We
will solve
the
fol-
lowing
BVP,
applying
the
procedure given
above:
1.
We
have
already
seen that
the
eigenfunctions
of
the
negative second derivative
operator,
on the
interval
[0,2]
and
subject
to
Dirichlet conditions,
are
The
effect
of
multiplying
the
operator
by 3 is to
multiply
the
eigenvalues
by 3,
so the
eigenvalues
are
2.
We
write
the
unknown
solution
u as
The
problem
now
reduces
to
computing
0,1,0,3,0,3,
—
3.
The
Fourier sine
coefficients
of
f(x]
= x
3
on the
interval
[0,2]
are
4-
The
Fourier sine
coefficients
of
—3d?u/dx
2
are
just
Thus
5.
Finally,
the
differential
equation
can be
written
as
168 Chapter
5.
Boundary value problems
in
statics
Example
5.16.
(Homogeneous
Dirichlet
conditions)
We
will solve the fol-
lowing
BVP,
applying the procedure given above:
3
d2U
_ 3
-
dx
2
- X ,
u(O)
= 0,
u(2) =
O.
0<
x < 2,
(5.30)
1.
We
have already seen that the eigenfunctions
of
the negative second derivative
operator, on the interval
[0,2]
and subject to Dirichlet conditions, are
sin
(n;x),
n =
1,2,3,
....
The effect
of
multiplying the operator by 3 is to multiply the eigenvalues by 3,
so the eigenvalues are
3n
2
7f2
An
=
-4-'
n = 1,2,3,
....
2.
We
write the unknown solution u
as
00
u(x)
= L an sin
(n;x).
n=l
The problem now reduces to computing
al,
a2, a3,
....
3.
The Fourier sine coefficients
of
f(x)
= x
3
on the interval
[0,21
are
and
so
4.
The Fourier sine coefficients
of
-3~u/dx2
are
just
Thus
5.
Finally, the differential equation can
be
written
as
5.3.
Solving
the BVP
using Fourier
series
169
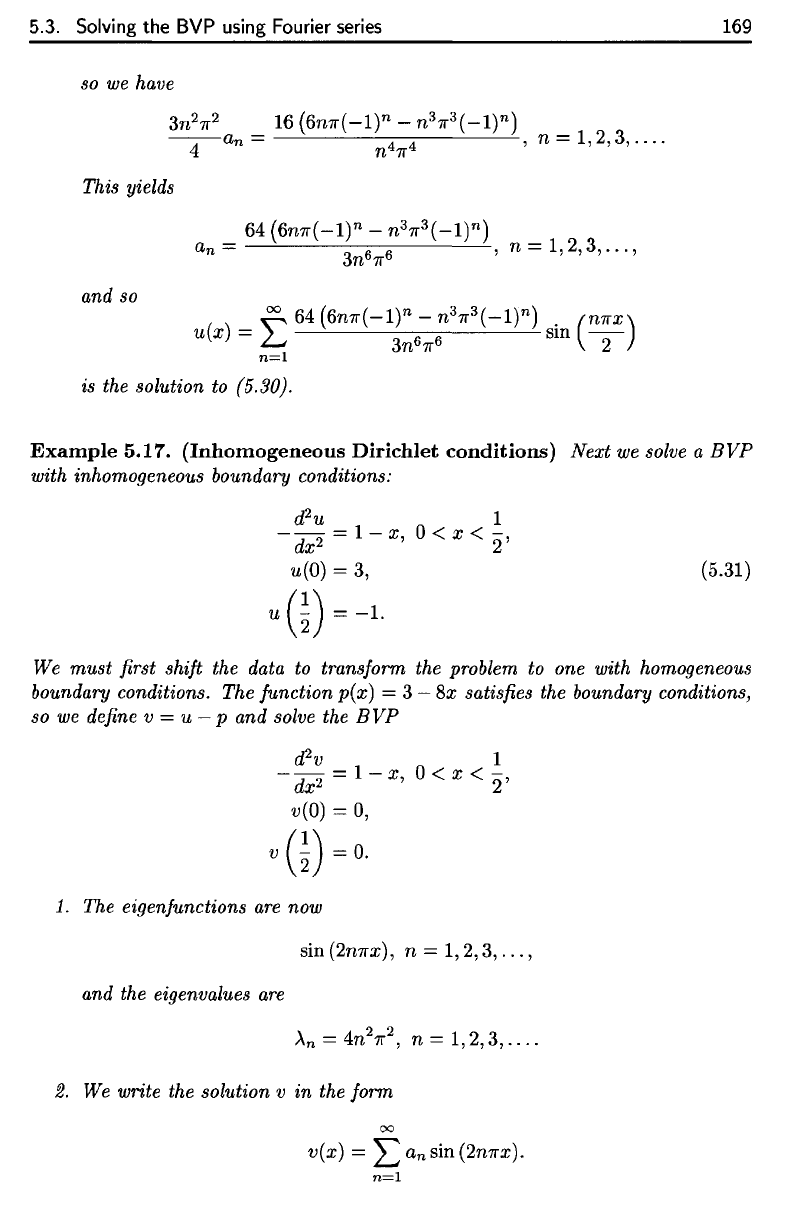
so we
have
This
yields
and
so
is
the
solution
to
(5.30)
Example 5.17.
(Inhomogeneous
Dirichlet conditions)
Next
we
solve
a BVP
with
inhomoqeneous
boundary conditions:
We
must
first
shift
the
data
to
transform
the
problem
to one
with homogeneous
boundary
conditions.
The
function
p(x]
— 3
—
Sx
satisfies
the
boundary
conditions,
so
we
define
v = u
—
p and
solve
the BVP
1. The
eigenfunctions
are now
and
the
eigenvalues
are
2.
We
write
the
solution
v in the
form
5.3.
Solving
the
BVP
using
Fourier
series
169
so
we
have
This yields
and so
is the solution to (5.30).
Example
5.17.
(Inhomogeneous
Dirichlet
conditions)
Next
we solve a
BVP
with inhomogeneous boundary conditions:
d
2
u
--
=
I-x
dx
2
'
u(O)
= 3,
u
(~)
=
-1.
1
0<
x <
2'
(5.31)
We
must
first shift the data to transform the problem to one with homogeneous
boundary conditions. The function p(x) = 3 -
8x
satisfies the boundary conditions,
so
we
define v = u - p and solve the B
VP
d
2
v
--=l-x
dx
2
'
v(O)
= 0,
v
(~)
=
O.
1.
The eigenfunctions
are
now
1
0<
x < 2'
sin (2mfx) , n =
1,2,3,
...
,
and the eigenvalues
are
2.
We write the solution v
in
the form
00
v(x)
= L
an
sin (2mfx).
n=l
170
Chapter
5.
Boundary
value problems
in
statics
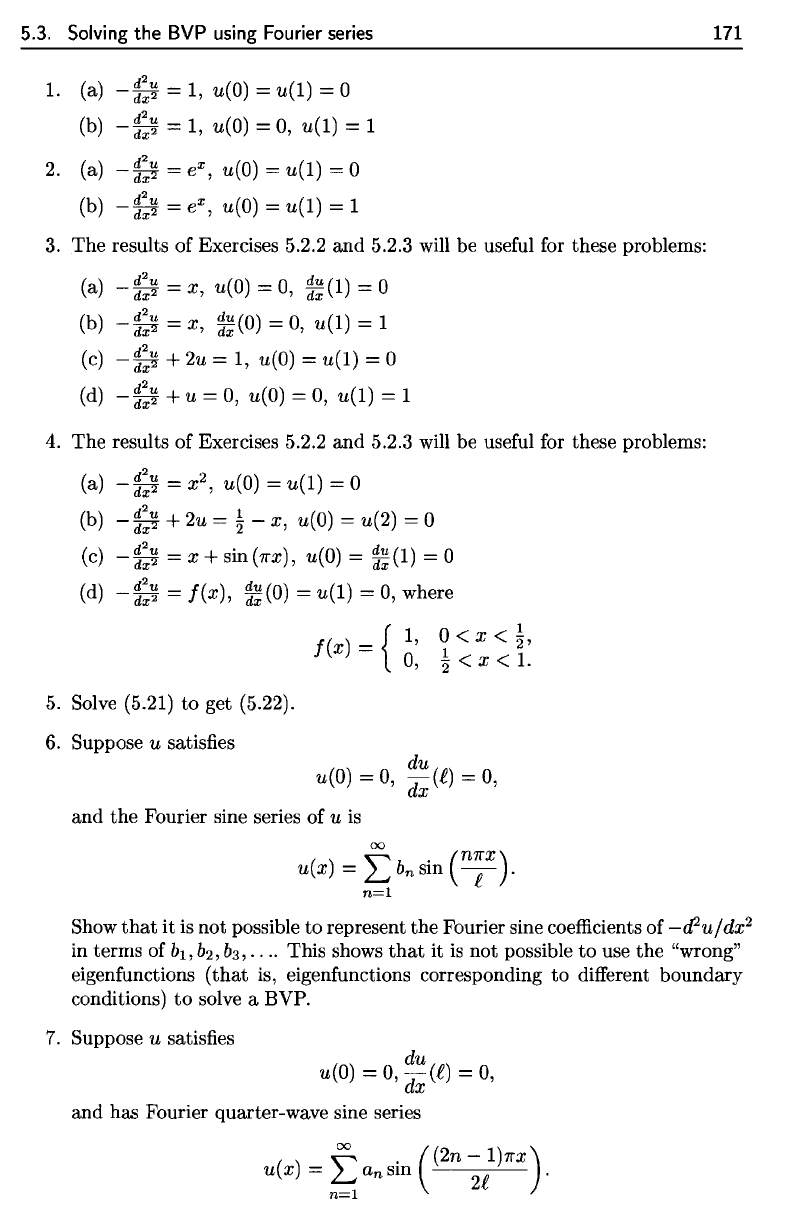
Exercises
In
Exercises 1-4, solve
the
BVPs using
the
method
of
Fourier series,
shifting
the
data
if
necessary.
If
possible,
30
produce
a
graph
of the
computed solution
by
plotting
a
partial
Fourier series with enough terms
to
give
a
qualitatively
correct
graph.
(The
number
of
terms
can be
determined
by
trial
and
error;
if the
plot
no
longer
changes,
qualitatively, when more terms
are
included,
it can be
assumed
that
the
partial
series
contains enough terms.)
30
That
is, if you
have
the
necessary technology.
3. The
Fourier sine
coefficients
of
f(x)
= 1
—
x are
and
so
4-
The
Fourier sine
coefficients
of
—d?v/dx
2
are
and
so
5.
We
thus obtain
The
solution
v is
then
or
which
implies
that
This
yields
170
Chapter
5.
Boundary value problems
in
statics
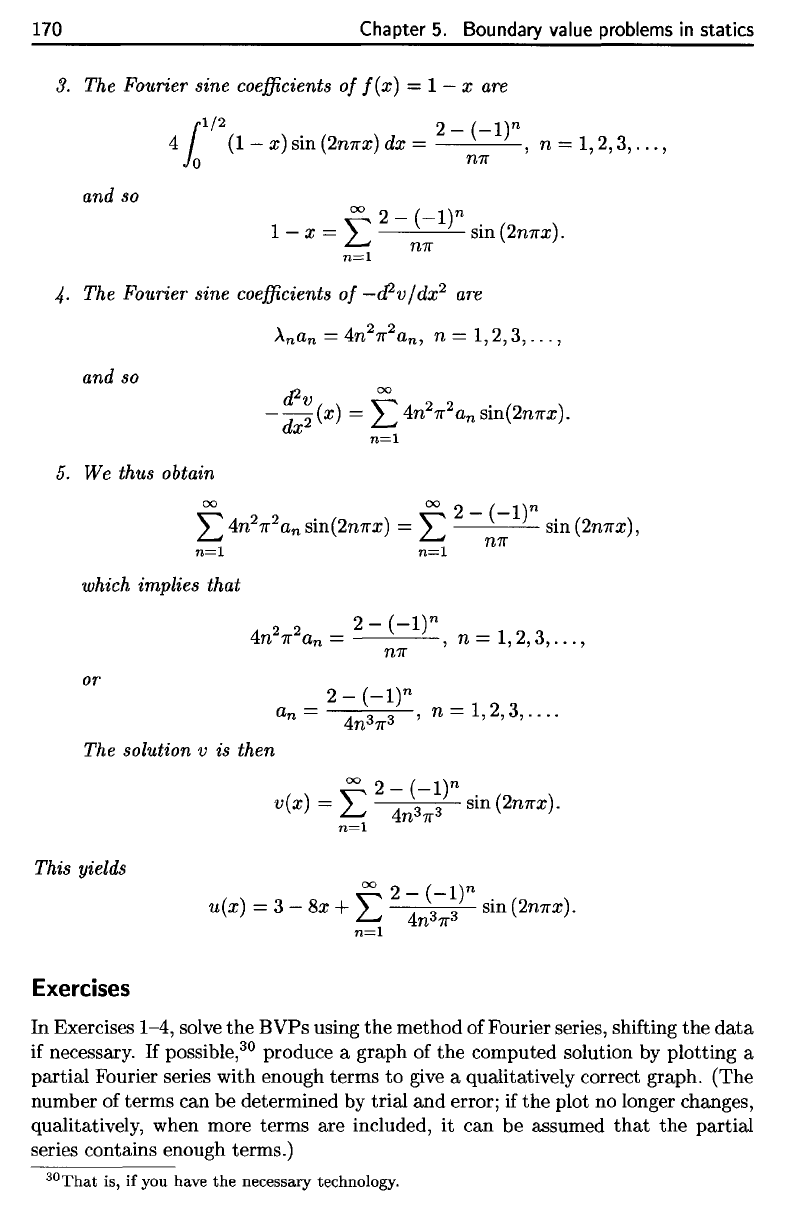
3.
The Fourier sine coefficients
of
f(x)
= 1 - x
are
1
1/2
2-(-1)n
4
(1
- x) sin (2mrx) dx = , n =
1,2,3,
...
,
o
nn
and
so
00
2 -
(_1)n
1-
x = L sin (2nnx).
nn
n=l
4.
The Fourier sine coefficients
of
_~V/dX2
are
and
so
-
~~
(x) =
f:
4n
2
n
2
a
n
sin(2nnx).
n=l
5.
We
thus obtain
00
002_(_1)n
L 4n
2
n
2
a
n
sin(2nnx) = L sin (2nnx),
n=l
n=l
nn
which implies that
or
4
22
2-(-1)n
n n an = , n =
1,2,3,
...
,
nn
2-(-1)n
an = 4 3 3
,n
=
1,2,3,
....
nn
The solution v is then
This yields
Exercises
002_(_1)n.
v(x) = L 4 3 3 sm (2nnx).
n=l
n n
002_(_1)n
u(x)=3-8x+L
4
33
sin (2nnx).
n=l
n n
In Exercises 1-4, solve
the
BVPs using the method of Fourier series, shifting the
data
if
necessary.
If
possible,3o produce a graph of the computed solution by plotting a
partial Fourier series with enough terms
to
give a qualitatively correct graph. (The
number of terms can be determined by trial
and
error; if
the
plot no longer changes,
qualitatively, when more terms are included,
it
can be assumed
that
the
partial
series contains enough terms.)
30That
is,
if
you have
the
necessary technology.
5.
Solve (5.21)
to get
(5.22).
6.
Suppose
u
satisfies
5.3. Solving
the BVP
using Fourier
series
171
3. The
results
of
Exercises 5.2.2
and
5.2.3
will
be
useful
for
these problems:
4. The
results
of
Exercises 5.2.2
and
5.2.3
will
be
useful
for
these problems:
and the
Fourier sine series
of u is
Show
that
it is not
possible
to
represent
the
Fourier sine
coefficients
of
—d?u/dx
2
in
terms
of
61,6
2
,
&3,
—
This
shows
that
it is not
possible
to use the
"wrong"
eigenfunctions
(that
is,
eigenfunctions corresponding
to
different
boundary
conditions)
to
solve
a
BVP.
7.
Suppose
u
satisfies
and has
Fourier
quarter-wave
sine series
5.3. Solving the BVP using Fourier
series
1.
(a) -
~:~
= 1,
u(O)
=
u(l)
= 0
(b) -
~:~
= 1,
u(O)
= 0,
u(l)
= 1
2.
(a) -~ = eX,
u(O)
=
u(l)
= 0
(b)
-~:~
= eX,
u(O)
=
u(l)
= 1
3.
The results of Exercises 5.2.2 and 5.2.3 will be useful for these problems:
(
a) -
d
2
u = X
u(O)
= 0
du
(1)
= 0
dx2'
,
dx
(b)
-~
= x,
~~(O)
=
0,
u(l)
= 1
(c)
-~+2u=l,
u(O)=u(l)=O
(
d) -
d
2
u + u - 0
u(O)
- 0
u(l)
- 1
dX2
-, -,
-
4.
The
results of Exercises 5.2.2 and 5.2.3 will be useful for these problems:
(a)
-~:~
= x
2
,
u(O)
=
u(l)
= 0
(b)
-~
+
2u
=
~
-
x,
u(O)
= u(2) = 0
(c)
-~:~
=x+sin(1fx),
u(O)
=
~~(1)
=0
(d)
-~:~
=
f(x),
~~(O)
=
u(l)
=
0,
where
5.
Solve (5.21) to get (5.22).
6.
Suppose u satisfies
f(x)
=
{I,
0 < x <
~,
0,
~
< x <
1.
du
u(O)
= 0,
dx
(f) = 0,
and the Fourier sine series of u
is
171
Show
that
it
is not possible to represent the Fourier sine coefficients of
-~u/
dx
2
in terms of b
1
,
b
2
,
b
3
, • .
..
This shows
that
it
is
not possible
to
use
the
"wrong"
eigenfunctions
(that
is, eigenfunctions corresponding
to
different boundary
conditions)
to
solve a BVP.
7.
Suppose u satisfies
du
u(O)
= 0,
dx
(£)
= 0,
and has Fourier quarter-wave sine series
~
.
((2n
-1)1fX)
u(x)
=
~ansm
2£
.
(Hint:
The
computation
of the
Fourier
coefficients
of
—Td?u/dx
2
is
similar
to
(5.23)).
8.
Consider
an
aluminum
bar of
length
1 m and
radius
1 cm.
Suppose
that
the
side
of the bar is
perfectly insulated,
the
ends
of the bar are
placed
in ice
baths,
and
heat
energy
is
added throughout
the
interior
of the bar at a
constant
rate
of
0.001
W/cm
3
.
The
thermal conductivity
of the
aluminum alloy
is
1.5W/(cmK).
Find
and
graph
the
steady-state
temperature
of the
bar.
Use
the
Fourier series method.
9.
Repeat
the
previous exercise, assuming
that
the
right
end of the bar is
per-
fectly
insulated
and the
left
is
placed
in an ice
bath.
10.
Consider
the
string
of
Example 5.12. Suppose
that
the
right
end of the
string
is
free
to
move vertically (along
a
frictionless pole,
for
example),
and a
pressure
of
2200
dynes
per
centimeter,
in the
upward direction,
is
applied along
the
string
(recall
that
a
dyne
is a
unit
of
force—one
dyne equals
one
gram-centimeter
per
square
second).
What
is the
equilibrium displacement
of the
string?
How
does
the
answer change
if the
force
due to
gravity
is
taken into account?
5.4
Finite
element methods
for
BVPs
As
we
mentioned near
the end of the
last section,
the
primary utility
of the
Fourier
series
method
is for
problems with constant
coefficients,
in
which case
the
eigenpairs
can be
found
explicitly. (For problems
in two or
three dimensions,
in
order
for the
eigenfunctions
to be
explicitly computable,
it is
also necessary
that
the
domain
on
which
the
equation
is to be
solved
be
geometrically simple.
We
discuss this
further
in
Chapter
8.) For
problems with nonconstant
coefficients,
it is
possible
to
perform
analysis
to
show
that
the
Fourier series method applies
in
principle—the
eigenfunctions
exist, they
are
orthogonal,
and so
forth.
The
reader
can
consult
Chapter
5 of
Haberman [22]
for an
elementary introduction
to
this kind
of
analysis,
which
we
also discuss
further
in
Section 9.7. However, without explicit formulas
for
the
eigenfunctions,
it is not
easy
to
apply
the
Fourier series method.
These remarks apply,
for
example,
to the BVP
(where
k is a
positive
function).
The
operator
K
:
C?JO,£]
—>
C[Q,l]
defined
by
172
Chapter
5.
Boundary
value
problems
in
statics
Show
that
the
Fourier series
of
—Td?u/dx
2
is
172
Chapter
5.
Boundary value problems in statics
Show
that
the
Fourier series of
-Td
2
ufdx
2
is
_Td
2
u(
) _
~
T(2n
-
1)27f2
.
((2n
-l)7fX)
dx2
x -
L..J
4£2
an
sm
2f
.
n=l
(Hint:
The
computation
ofthe
Fourier coefficients of
-Td
2
ufdx
2
is
similar
to
(5.23)).
8. Consider
an
aluminum
bar
of length 1 m
and
radius 1 cm. Suppose
that
the
side of the
bar
is
perfectly insulated,
the
ends of
the
bar
are placed in ice baths,
and
heat
energy is added throughout
the
interior of
the
bar
at
a constant
rate
of 0.001 W
fcm
3
.
The
thermal conductivity of the aluminum alloy is
1.5W/(cmK).
Find
and graph
the
steady-state
temperature
of
the
bar. Use
the
Fourier series method.
9. Repeat
the
previous exercise, assuming
that
the
right end of
the
bar
is
per-
fectly insulated
and
the
left is placed in
an
ice
bath.
10. Consider
the
string of Example 5.12. Suppose
that
the right end of
the
string is
free
to
move vertically (along a frictionless pole, for example),
and
a pressure of
2200 dynes per centimeter, in
the
upward direction, is applied along
the
string
(recall
that
a dyne is a unit of
force-one
dyne equals one gram-centimeter
per
square second).
What
is
the
equilibrium displacement of
the
string? How
does
the
answer change
if
the
force due
to
gravity is taken into account?
5.4 Finite element methods
for
BVPs
As
we
mentioned near the end of
the
last section,
the
primary utility of the Fourier
series method
is
for problems with constant coefficients, in which case
the
eigenpairs
can
be
found explicitly. (For problems in two or three dimensions, in order for
the
eigenfunctions to
be
explicitly computable,
it
is also necessary
that
the
domain
on which
the
equation
is
to
be solved be geometrically simple.
We
discuss this
further in
Chapter
8.) For problems with nonconstant coefficients,
it
is
possible
to
perform analysis
to
show
that
the
Fourier series method applies in
principle-the
eigenfunctions exist, they are orthogonal,
and
so forth. The reader can consult
Chapter
5 of Haberman
[22]
for
an
elementary introduction
to
this kind of analysis,
which
we
also discuss further in Section 9.7. However, without explicit formulas for
the
eigenfunctions, it is
not
easy
to
apply
the
Fourier series method.
These remarks apply, for example,
to
the
BVP
-
d~
(k(X)~:)
=
f(x),
0 < x <
£,
u(O)
=
0,
(5.32)
u(£) = 0
(where k is a positive function).
The
operator
K:
Cb[O,£]
-t
C[O,£]
defined by
Ku
=
--
k(x)-
d (
dU)
dx dx
(5.33)
5.4.
Finite
element
methods
for
BVPs
173
is
symmetric (see Exercise
1),
and
there exists
an
orthogonal sequence
of
eigenfunc-
tions. However, when
the
coefficient
k(x]
is not a
constant,
there
is no
simple
way
to find
these eigenfunctions. Indeed, computing
the
eigenfunctions requires much
more work
than
solving
the
original BVP.
Because
of the
limitations
of the
Fourier series approach,
we now
introduce
the
finite
element method,
one of the
most
powerful
methods
for
approximating solutions
to
PDEs.
The finite
element method
can
handle both variable
coefficients
and,
in
multiple
spatial
dimensions, irregular geometries.
We
will
still restrict ourselves
to
symmetric operators, although
it is
possible
to
apply
the finite
element method
to
nonsymmetric problems.
The finite
element method
is
based
on
three ideas:
1. The BVP is
rewritten
in its
weak
or
variational
form,
which expresses
the
problem
as
infinitely
many scalar equations.
In
this
form,
the
boundary con-
ditions
are
implicit
in the
definition
of the
underlying vector space.
2.
The
Galerkin
method
is
applied
to
"solve
the
equation
on a finite-dimensional
subspace."
This results
in an
ordinary linear system (matrix-vector equation)
that
must
be
solved.
3. A
basis
of
piecewise
polynomials
is
chosen
for the finite-dimensional
subspace
so
that
the
matrix
of the
linear system
is
sparse
(that
is, has
mostly zero
entries).
We
describe each
of
these ideas
in the
following
sections, using
the BVP
(5.32)
as
our
model problem.
We
always assume
that
the
coefficient
k(x]
is
positive, since
it
represents
a
positive physical parameter
(stiffness
or
thermal conductivity,
for
example).
5.4.1
The
principle
of
virtual
work
and the
weak
form
of a BVP
When
an
elastic material
is
deformed,
it
stores potential energy
due to
internal
elastic
forces.
It is not
obvious
from
first
principles
how to
measure (quantitatively)
this elastic potential
energy;
however,
we can
deduce
the
correct definition
from
the
equations
of
motion
and the
principle
of
conservation
of
energy.
Suppose
an
elastic bar, with
its
ends
fixed, is in
motion,
and its
displacement
function
u(x,
t)
satisfies
the
homogeneous wave equation:
We
now
perform
the
following
calculation
(a
trick—multiply
both sides
of the
wave
equation
by
du/dt
and
integrate):
5.4. Finite element methods for BVPs
173
is symmetric (see Exercise 1),
and
there exists
an
orthogonal sequence of eigenfunc-
tions. However, when
the
coefficient k(x)
is
not a constant, there is no simple way
to
find these eigenfunctions. Indeed, computing
the
eigenfunctions requires much
more work
than
solving
the
original BVP.
Because of
the
limitations of
the
Fourier series approach,
we
now introduce
the
finite element method, one of
the
most powerful methods for approximating solutions
to
PDEs.
The
finite element method can handle
both
variable coefficients and, in
multiple spatial dimensions, irregular geometries.
We
will still restrict ourselves
to
symmetric operators, although it
is
possible
to
apply
the
finite element method
to
nonsymmetric problems.
The
finite element method is based on three ideas:
1.
The
BVP
is rewritten in its weak or variational
form,
which expresses
the
problem as infinitely many scalar equations.
In
this form,
the
boundary con-
ditions are implicit in
the
definition of
the
underlying vector space.
2.
The
Galerkin method is applied
to
"solve
the
equation on a finite-dimensional
subspace." This results in
an
ordinary linear system (matrix-vector equation)
that
must be solved.
3. A basis of
piecewise polynomials is chosen for
the
finite-dimensional subspace
so
that
the matrix of
the
linear system is sparse
(that
is, has mostly zero
entries).
We describe each of these ideas in
the
following sections, using the BVP (5.32) as
our model problem.
We
always assume
that
the
coefficient k(x) is positive, since
it
represents a positive physical parameter (stiffness or thermal conductivity, for
example).
5.4.1 The principle of virtual
work
and
the
weak
form of a BVP
When
an
elastic material is deformed, it stores potential energy due
to
internal
elastic forces.
It
is not obvious from first principles how
to
measure (quantitatively)
this
elastic potential energy; however,
we
can deduce
the
correct definition from
the
equations of motion
and
the
principle of conservation of energy.
Suppose
an
elastic bar, with its ends fixed,
is
in motion,
and
its displacement
function
u(x, t) satisfies
the
homogeneous wave equation:
a
2
u a (
au)
Ap(x)at
2
-Aax
k(x)ax
=0,
O<x<f,
t>o,
u(O,
t) =
0,
t > 0,
(5.34)
u(f, t) =
0,
t >
0.
We
now perform
the
following calculation
(a
trick-multiply
both
sides of
the
wave
equation by
au/at
and integrate):
174
Chapter
5.
Boundary value problems
in
statics
This
equation implies
that
the sum of the two
integrals
is
constant with respect
to
time,
that
is,
that
is
conserved. Obviously,
the first
integral represents
the
kinetic energy (one-half
mass times velocity squared),
and we
define
the
second integral
to be the
elastic
potential energy.
The
elastic potential energy
is the
internal energy arising
from
the
strain
du/dx.
We
now
return
to the bar in
equilibrium,
that
is, to the bar
satisfying
the
BVP
(5.32).
We
have
an
expression
for the
elastic potential energy
of the
bar:
The
bar
possesses another
form
of
potential energy,
due to the
external
force
/
acting upon
it. The
proper name
of
this energy depends
on the
nature
of the
force;
if
it
were
the
force
due to
gravity,
for
example,
it
would
be
called
the
gravitational
Also,
Applying
integration
by
parts,
Therefore,
we
obtain
Applying
Theorem
2.1 to
(5.35) yields
174
Chapter
5.
Boundary value problems
in
statics
Applying integration by parts,
1
£ a (
au)
au
[auau]£
1£
au a
2
u
- -
k(x)-
-dx
= -
k(x)--
+
k(x)---dx
o ax ax at ax at 0 0 ax axat
r£
au a
2
u ( . au au )
=
10
k(x) ax atax dx smce at (0, t) = at (l,
t)
= 0 .
Also,
Therefore,
we
obtain
Ap(x)-
- - dx +
Ak(x)-
- -
1
£ a
[1
(au)2]
1£
a
[1
(au)2]
o at 2 at 0 at 2 ax
dx
=0.
(5.35)
Applying Theorem
2.1
to (5.35) yields
a [ 1
r£
( a ) 2 1
rl
( a ) 2 ]
at
"210
Ap(x)
a~
dx
+
"210
Ak(x)
a~
dx
= 0, t >
o.
(5.36)
This equation implies
that
the sum of the two integrals
is
constant with respect
to
time,
that
is,
that
1
r£
(a
) 2 1
r£
(a
) 2
"210
Ap(x)
a~
dx
+
"210
Ak(x)
a:
dx
is
conserved. Obviously, the first integral represents the kinetic energy (one-half
mass times velocity squared), and
we
define the second integral
to
be the elastic
potential energy. The elastic potential energy
is
the internal energy arising from
the
strain au/ax.
We
now return
to
the
bar
in equilibrium,
that
is,
to
the
bar
satisfying the
BVP
(5.32).
We
have an expression for the elastic potential energy of
the
bar:
1
r£
(d)2
"210
Ak(x)
d~
(x)
dx.
The
bar
possesses another form of potential energy, due
to
the external force f
acting upon it. The proper name of this energy depends on the nature of
the
force;
if it were the force due to gravity, for example, it would be called the gravitational
5.4.
Finite
element
methods
for
BVPs
175
potential energy.
We
will
call this energy
the
external potential
energy.
This energy
is
different
in a
fundamental
way
from
the
elastic potential energy:
it
depends
on the
absolute position
of the
bar,
not on the
relative position
of
parts
of the bar to
other
parts.
For
this reason,
we do not
know
the
external potential energy
of the bar in its
"reference" (zero displacement)
position
(whereas
the bar has
zero
elastic
potential
energy
in the
reference
position).
We
define
£Q
to be the
external
potential
energy
of
the bar in the
reference position,
and we now
compute
the
change
of
energy between
the bar in its
reference position
and the bar in its
equilibrium position.
The
change
in
potential energy
due to the
external
force
/ is
equal
to the
work done
by /
when
the bar is
deformed
from
its
reference position
to its
equilibrium position.
The
work
done
by /
acting
on the
part
P of the bar
originally between
x and
x
+
Ax
is
approximately
(recall
that
u(x)
is the
displacement
of the
cross-section
of the bar
originally
at
x—thus
u(x)
is the
distance traveled
by
that
cross-section).
To add up the
work
due
to the
external
force
acting
on all
little
parts
of the
bar,
we
integrate:
We
now
have
an
expression
for the
total
potential energy
of the bar in its
equilibrium position:
If
/ and
u
are
both positive,
for
instance, then
the bar has
less potential energy
in
its
equilibrium position (think
of
gravity).
This
accounts
for the
sign
on the
second
integral.
Next
we
wish
to
prove
the
following
fact:
the
equilibrium displacement
u of
the
bar is the
displacement with
the
least
potential
energy.
That
is, if
w
^
u is any
other displacement satisfying
the
Dirichlet conditions, then
We
can
write
any
displacement
w as w = u + v
(just take
v = w
—
w), and
the
conditions
u(Q)
— 0,
w;(0)
= 0
imply
that
v(0)
— 0, and
similarly
at x = t.
Thus
v
must belong
to
C|)[0,
^].
For
brevity,
we
shall write
V =
Cf^O,^],
the set of
allowable displacements
v.
Therefore,
we
wish
to
prove
that
We
have
5.4. Finite element methods for BVPs
175
potential energy.
We
will call this energy
the
external potential energy. This energy
is different in a fundamental way from
the
elastic potential energy:
it
depends on
the
absolute position of the bar,
not
on
the
relative position of
parts
of
the
bar
to
other
parts. For this reason,
we
do not know
the
external potential energy of
the
bar
in its
"reference" (zero displacement) position (whereas
the
bar
has zero elastic potential
energy in
the
reference position).
We
define
Co
to
be
the
external potential energy of
the
bar
in
the
reference position,
and
we
now compute
the
change of energy between
the
bar
in its reference position
and
the
bar
in its equilibrium position.
The
change
in potential energy due
to
the
external force f is equal
to
the
work done by f when
the
bar
is deformed from its reference position
to
its equilibrium position.
The
work done by f acting on
the
part
P of
the
bar
originally between x
and
x +
~x
is approximately
f(x)
~
force per unit volume
volume
,.,.-"-..
A~x
u(x)
~
distance
(recall
that
u(x)
is
the
displacement of
the
cross-section of
the
bar
originally
at
x-thus
u(x) is
the
distance traveled by
that
cross-section). To
add
up
the
work
due
to
the
external force acting on all little
parts
of the bar,
we
integrate:
l'
Af(x)u(x)
dx.
(5.37)
We
now have
an
expression for
the
total
potential energy of
the
bar
in its
equilibrium position:
Cpot(u)
=
~
l'
Ak(x)
(:~
(X)) 2 dx
-1'
Af(x)u(x)
dx +
co.
If
f
and
u are
both
positive, for instance,
then
the
bar
has less potential energy in
its equilibrium position (think of gravity). This accounts for
the
sign on
the
second
integral.
Next
we
wish
to
prove
the
following fact: the equilibrium displacement u
of
the bar is the displacement with the least potential energy.
That
is, if w
¥-
u is any
other displacement satisfying
the
Dirichlet conditions,
then
Cpot(w)
>
Cpot(u).
We
can write any displacement w as w = u + v (just take v = w - u),
and
the
conditions
u(O)
=
0,
w(O)
= 0 imply
that
v(O)
=
0,
and
similarly
at
x =
£.
Thus v must belong
to
c1
[0,
fl.
For brevity,
we
shall write V =
C1
[0,
f],
the
set of
allowable displacements
v. Therefore,
we
wish
to
prove
that
Cpot(u
+ v) >
Cpot(u)
for all v E
V.
We
have
1
r'
(dU
dV) 2 (
Cpot(u
+ v) =
"210
k(x) dx (x) + dx (x) dx -
10
f(x)
(u(x) + vex)) dx +
Co
that
is,
176
Chapter
5.
Boundary
value
problems
in
statics
Using
integration
by
parts,
we
have
(The boundary term disappears
in the
above calculation since
v(0]
=
v(t]
= 0.)
The
equilibrium displacement
u
satisfies
the
differential
equation
from
(5.32),
as we
derived
in
Section 2.2. Therefore,
the
integral above vanishes,
and we
have
If
v is not
identically zero, then neither
is
dv/dx
(only
a
constant function
has
a
zero derivative,
and v
cannot
be
constant unless
it is
identically zero, because
v(Q)
=v(l)
=
G).
Since
whenever
v
^
0
(the integral
of a
nonzero, nonnegative
function
is
positive),
we
have obtained
the
desired result:
176
Chapter
5.
Boundary value problems
in
statics
III
((dU)2
du
dv
(dV
)2)
=2 0 k(x) dx(X)
+2
dx
(X)dx(X)+ dx(X) dx
-
fot
f(x)u(x) dx -
fot
f(x)v(x)
dx +
[0
1
It
(dU)
2
It
du
dv
="2
0 k(x) dx (x) dx + 0 k(x) dx (x) dx (x) dx
1
It
(
dv
) 2
lf
lf
+"2
0 k(x) dx
(x)
dx - 0 f(x)u(x) dx - 0 f(x)v(x) dx +
[0;
that
is,
[pot(U
+
v)
= [pot(u) +
fof
k(x)
~~
(x)
~:
(x) dx -
fol
f(x)v(x) dx
11t
(d
)2
+"2
0 k(x)
~(x)
dx.
(5.38)
Using integration by parts,
we
have
fof
k(x)
~~
(x)
~:
(x) dx -
fot
f(x)v(x) dx
=
[k(X)~~(X)V(X)]:
-
fof
(d~
(k(x)~~(x)))V(X)dX-
fof
f(x)v(x) dx
= -
fot
(d~
(k(X)~~(X))
+
f(X))
v(x)dx.
(The boundary
term
disappears in
the
above calculation since
v(O)
=
v(£)
= 0.)
The
equilibrium displacement U satisfies
d (
du
)
dx k(x) dx (x) +
f(x)
= 0,
the
differential equation from (5.32), as
we
derived in Section 2.2. Therefore, the
integral above vanishes,
and
we
have
11£
(dv)2
[pot(U
+
v)
=
[pot(U)
+ 2 0 k(x) dx (x) dx.
If
v is
not
identically zero,
then
neither is
dv
/ dx (only
<l:
constant function has
a zero derivative,
and
v cannot be constant unless
it
is identically zero, because
v(O)
=
v(£)
= 0). Since
11t
(d
)2
2 0 k(x)
d:(x)
dx>O
whenever
v:/;O
(the integral of a nonzero, nonnegative function is positive),
we
have obtained
the
desired result:
5.4.
Finite
element methods
for
BVPs
177
This result gives
us a
different
understanding
of the
equilibrium
state
of the
bar—the
bar
assumes
the
state
of
minimal potential energy. This complements
our
earlier understanding
that
the bar
assumes
a
state
in
which
all
forces
balance.
The
potential
energy
£
poi
defines
a
function mapping
the
space
of
physically
meaningful
displacements into
R, and the
equilibrium displacement
u is its
mini-
mizer.
A
standard
result
from
calculus
is
that
the
derivative
of a
real-valued
function
must
be
zero
at a
minimizer. Above
we
computed
the
strong form.
We can
show directly
that
the two
forms
of the BVP are
equivalent,
in
the
sense
that,
for / 6
C[0,
I],
u
satisfies
the
strong
form
if and
only
if it
satisfies
the
weak
form.
5.4.2
The
equivalence
of the
strong
and
weak forms
of the BVP
The
precise
statement
of the
weak
form
of the BVP is:
We
have already seen
the
proof
of the
following
fact:
If u
satisfies (5.39),
the
strong
form
of the
BVP, then
u
also satisfies (5.40),
the
weak form. This
was
proved
(see
(5.38)).
The
linear term
in
this expression must
be
D£
pot
(u)v,
the
directional
derivative
of
£
pot
at u in the
direction
of v. The
minimality
of the
potential energy
then implies
that
D£
poi
(u}
=
0, or,
equivalently,
This yields
(as we saw
above),
which
is
called
the
principle
of
virtual work. (The term linear
in u
dominates
the
work
£
po
t
(u +
v}
—
£
po
t
(u)
when
the
displacement
v is
arbitrarily
small
("virtual"),
and is
called
the
virtual work.
The
principle says
that
the
virtual
work
is
zero when
the bar is at
equilibrium.)
The
principle
of
virtual work
is
also called
the
weak
form
of the
BVP;
it is
the
form
that
the BVP
would take
if our
basic principle were
the
minimality
of
potential
energy
rather
than
the
balance
of
forces
at
equilibrium.
By
contrast,
we
will
call
the
original BVP,
5.4. Finite element methods for BVPs
177
This
result gives us a different
understanding
of
the
equilibrium
state
of
the
bar-the
bar
assumes
the
state
of minimal
potential
energy.
This
complements
our
earlier
understanding
that
the
bar
assumes a
state
in which all forces balance.
The
potential
energy
[pot
defines a function
mapping
the
space of physically
meaningful displacements
into
R,
and
the
equilibrium displacement u is
its
mini-
mizer. A
standard
result from calculus is
that
the
derivative
of
a real-valued function
must
be
zero
at
a minimizer. Above we
computed
[pot
(u
+ v) =
[pot
(u) + a
term
linear in v + a
term
quadratic
in v
(see (5.38)).
The
linear
term
in
this
expression
must
be
D[pot(u)v,
the
directional
derivative of
[pot
at
u in
the
direction of v.
The
minimality
of
the
potential
energy
then
implies
that
D[pot(u) = 0, or, equivalently,
D[pot(u)v = ° for all v E
V.
This
yields
i
f du
dv
if
o k(x) dx (x) dx (x) dx - 0
f(x)v(x)
dx = ° for all v E V
(as we saw above), which is called
the
principle
of
virtual work.
(The
term
linear
in
u dominates
the
work
[pot
(u
+
v)
-
[pot
(u)
when
the
displacement v
is
arbitrarily
small
("virtual"),
and
is called
the
virtual work.
The
principle says
that
the
virtual
work is zero when
the
bar
is
at
equilibrium.)
The
principle of
virtual
work
is
also called
the
weak form of
the
BVP;
it
is
the
form
that
the
BVP
would
take
if
our
basic principle were
the
minimality of
potential
energy
rather
than
the
balance of forces
at
equilibrium.
By
contrast,
we
will call
the
original BVP,
d ( du )
- dx k(x) dx (x)
=f(x),O<x<f,
u(o) = 0, (5.39)
u(f) = 0,
the
strong form. We
can
show directly
that
the
two forms of
the
BVP
are
equivalent,
in
the
sense
that,
for f E
C[O,
£],
u satisfies
the
strong
form
if
and
only if
it
satisfies
the
weak form.
5.4.2
The
equivalence
of
the strong
and
weak forms
of
the
BVP
The
precise
statement
of
the
weak form of
the
BVP
is:
i
f du
dv
if
find u E V such
that
0 k(x) dx (x) dx (x) dx = 0
f(x)v(x)
dx for all v E
V.
(5.40~
We have already seen
the
proof of
the
following fact:
If
u satisfies (5.39),
the
strong
form of
the
BVP,
then
u also satisfies (5.40),
the
weak form.
This
was proved