Gerya T. Introduction to Numerical Geodynamic Modelling
Подождите немного. Документ загружается.

Programming exercises and homework 177
volumetric changes which are of the form:
−
D ln ρ
Dt
= div(¯v) = 2sin(ψ)˙ε
II(plastic)
, (12.52)
˙ε
II(plastic)
=
1
2
˙ε
ij (plastic)
˙ε
ij (plastic)
1/2
, (12.53)
where ψ is the dilatation angle, which generally depends on total plastic strain, and
˙ε
II(plastic)
is the second invariant of the deviatoric plastic strain rate tensor.
Analytical exercise
Exercise 12.1
Derive the equation for visco-elastic stress build-up/relaxation with time, using the
Maxwell model (Eq. (12.40)) under conditions of constant strain rate ˙ε
ij
, viscosity
η, shear modulus µ, and no stress rotation involved such that
D σ
ij
Dt
=
Dσ
ij
Dt
.Takethe
initial state of stress to be given by σ
0ij
and integrate Eq. (12.40) (now reformulated
in term of stress σ
ij
) to obtain the analytical solution. Reformulate the resulting
equation in terms of Maxwell relaxation time
t
Maxwell
=
η
µ
, (12.54)
which defines the characteristic time scale for visco-elastic stress relaxation.
Programming exercises and homework
Exercise 12.2
Use the analytical formula from the previous example to compute and compare
stress–time curves for the following parameters:
(1) σ
0ij
= 0Pa,˙ε
ij
= 10
−14
1/s, η = 10
21
Pa s, µ = 10
10
Pa;
(2) σ
0ij
= 10
8
Pa, ˙ε
ij
= 10
−14
1/s, η = 10
21
Pa s, µ = 10
10
Pa;
(3) σ
0ij
= 0Pa,˙ε
ij
= 10
−15
1/s, η = 10
21
Pa s, µ = 10
10
Pa;
(4) σ
0ij
= 0Pa,˙ε
ij
= 10
−14
1/s, η = 10
22
Pa s, µ = 10
10
Pa;
(5) σ
0ij
= 0Pa,˙ε
ij
= 10
−14
1/s, η = 10
21
Pa s, µ = 10
11
Pa;
(6) σ
0ij
= 0Pa,˙ε
ij
= 10
−14
1/s, η = 10
22
Pa s, µ = 10
11
Pa.
Try to understand how the different parameters control the stress build-up/
relaxation. An example is in Viscoelastic_stress.m.
178 Elasticity and plasticity
Exercise 12.3
Compute the visco-elasto-plastic stress build-up and observe the changes in the
viscous, elastic and plastic strain rates with time when using the parameters from
case (4) of the previous example. Assume the condition that the visco-elastic stress
σ
ij
must not exceed the yield stress limit of 1.5 ×10
8
Pa. Use Equation (12.46)
to compute the viscous strain rate. Use Equations (12.45), (12.47)and(12.48)to
compute elastic and plastic strain rates. Consider that after reaching the yielding
limit, the stress in the visco-elasto-plastic material should not change any more and
therefore
D σ
ij
Dt
=
Dσ
ij
Dt
= 0. An example is in Viscoelastoplastic_strain_rate.m.
Exercise 12.4
Modify Exercise 6.3 by adding Peierls creep for the high stress region (>10
8
Pa).
Compute the effective viscosity for this region by analogy to Eqs. (6.16)–(6.18) as
follows
1
η
eff
=
1
η
diff
+
1
η
disl
+
1
η
Peierls
, (12.55)
where η
Peierls
is Peierls creep viscosity defined on the basis of Eqs. (12.44)and
(6.4) as
η
Peierls
=
1
2A
Peierls
σ
II
exp
E
a
+ PV
a
RT
1 −
σ
II
σ
Peierls
k
q
. (12.56)
Use the following Peierls creep parameters (Evans and Goetze, 1979; Katayama
and Karato, 2008): dry olivine – k = 1, q = 2, A
Peierls
= 10
−4.2
Pa
−2
s
−1
, E
a
=
540 000 J/mol, σ
Peierls
= 9.1 ×10
9
Pa; wet olivine – k = 1, q = 2, A
Peierls
=
10
−4.2
Pa
−2
s
−1
, σ
Peierls
= 2.9 ×10
9
Pa; E
a
= 430 000 J/mol. Note that the activa-
tion energy E
a
for Peierls creep is the same as for respective dislocation creep
(Table 6.1). Note that stress σ
II
used for computing effective viscosity with
Eq. (12.56) should always be limited by σ
Peierls
, which corresponds to the upper
strength limit. An example is in Peierls_creep.m.

13
2D implementation of
visco-elasto-plastic rheology
Theory: Numerical implementation of visco-elasto-plastic rheology.
Organisation of a thermomechanical code in case of 2D, visco-
elasto-plastic, multi-phase flows.
Exercises: Programming a 2D thermomechanical code with a visco-
elasto-plastic rheology.
13.1 Viscous-like reformulation of visco-elasto-plasticity
One way of reformulating the visco-elasto-plastic rheological model (12.45) for
easy implementation into a viscous code (which we already have programmed)
is based on using finite differences in time. The deviatoric stress σ
ij
is expressed
as a function of the total deviatoric strain rate ˙ε
ij
from the visco-elasto-plastic
constitutive relationships (Eq. (12.45)), by using first-order finite differences in
time to represent the objective co-rotational time derivatives
D σ
ij
Dt
of visco-elastic
stresses
D σ
ij
Dt
=
σ
ij
− σ
o
ij
t
, (13.1)
σ
ij
= 2η
vp
˙ε
ij
Z + σ
o
ij
(
1 − Z
)
, (13.2)
Z =
tµ
tµ + η
vp
, (13.3)
η
vp
= η when σ
II
<σ
yield
, and η
vp
= η
σ
II
ηχ + σ
II
, for σ
II
= σ
yield
, (13.4)
in which t is the computational time step, σ
o
ij
indicates the deviatoric stress
from the previous time step corrected for advection and rotation, Z is the visco-
elasticity factor and η
vp
is a viscosity-like Lagrangian parameter that characterises
the intensity of the plastic deformation (η
vp
= η when no plastic yielding occurs).
179
180 2D implementation of visco-elasto-plastic rheology
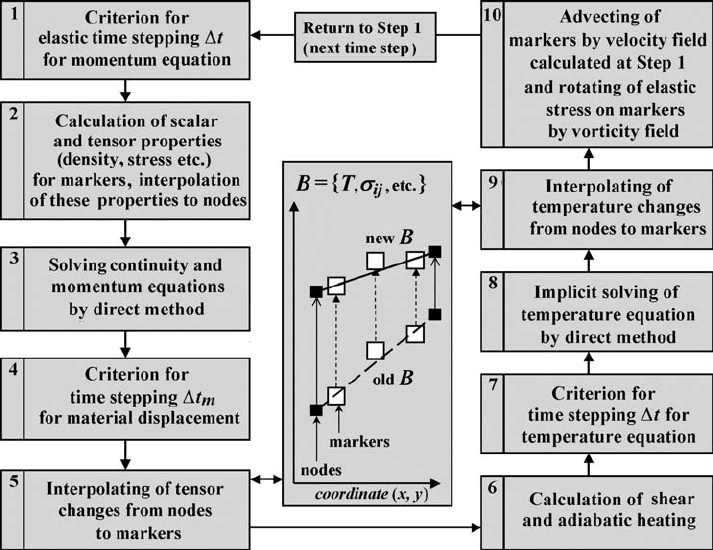
Fig. 13.1 Flow chart representing an example of a possible structure for a numer-
ical thermomechanical visco-elasto-plastic 2D code which uses finite-differences
and marker-in-cell technique (FD+MIC) for solving momentum, continuity and
temperature equation. (Gerya and Yuen, 2007).
Equation (13.2) can also be applied to a visco-elastic Maxwell rheology by using
the condition that η
vp
= η.
13.2 Structure of visco-elasto-plastic thermomechanical code
When using the constitutive relationship (Eq. (13.2)) between the stress and strain
rate, we can now formulate the momentum, continuity and temperature equations
for the case of visco-elasto-plastic deformation in 2D and implement these equa-
tions in a thermomechanical visco-elasto-plastic modelling algorithm (Fig. 13.1).
The algorithm is largely based on our viscous thermomechanical code structure
discussed in Chapter 11 (Fig. 11.1, 11.2).
The flow chart in Fig. 13.1 gives an example of a possible structure of a numer-
ical thermomechanical visco-elasto-plastic 2D code, which uses finite-differences
combined with a marker-in-cell technique (FD+MIC) to solve the momentum,
continuity and temperature equations. The principal steps of the algorithm are as
follows:
13.2 Structure of visco-elasto-plastic code 181
1. Defining an optimal computational time step t for the momentum and continuity
equations. One can use a minimum time step value, which satisfies the following three
conditions: a given absolute time step limit on the order of a minimal characteristic
timescale for the processes being modelled; a given relative marker displacement step
limit (typically 0.01–1.0 of minimal grid step) that corresponds to the velocity field
calculated at the previous time step (see Step 3); a given relative fraction of Lagrangian
markers reaching locally the yielding condition (Eq. (12.51)) for the first time (typically
0.0001–0.01 of the total amount of markers representing materials with defined plastic
yielding condition).
2. Calculating the physical properties (η
vp
, µ, ρ, C
P
, k, etc.) for the markers and inter-
polating these newly calculated properties, as well as scalars and tensors defined on
the markers (T, σ
ij
, etc.) to the Eulerian nodes (Fig. 13.2). The plastic yielding con-
dition (Eq. (12.51)) is locally controlled on markers by using Eq. (13.2) to predict
stress changes. This equation is solved in an iterative way for every marker in order to
compute η
vp
based on a local viscous flow law (Eq. 6.5a) and a local plastic flow rule
(Eq. 13.4).
3. Solving the 2D Stokes and continuity equations and computing the velocity and pressure
by solving the global matrix with a direct method.
4. Defining an optimal displacement time step t
m
for markers (typically limiting the
maximal displacement to 0.01–1.0 of the minimal grid step) which can be generally
smaller or equal to the computational time step t (see Step 1).
5. Calculating the stress changes (Eq. (13.2)) on the Eulerian nodes for the displacement
step t
m
(see Step 4) and interpolating these changes to the markers and calculating
new tensor values associated with the markers (see central panel in Fig. 13.1).
6. Calculating the shear and adiabatic heating terms H
s(i,j)
and H
a(i,j)
at the Eulerian
nodes from the computed velocity, pressure, strain rate and stress fields (see Step 3).
7. Defining an optimal time step t
T
for the temperature equation. One can use a minimum
time step value satisfying the following conditions: a given absolute time step limit on
the order of a minimal characteristic thermal diffusion timescale for the processes
being modelled; a given optimal marker displacement time step limit (see Step 3); a
given absolute nodal temperature change limit (typically 1–20 K) (Chapter 10). The
temperature equation can be preliminary solved with the displacement time step t
m
to define possible temperature changes.
8. Solving the temperature equation implicitly in time by a direct method. The temperature
equation can be solved in several steps when t
T
<t
m
.
9. Interpolating the calculated nodal temperature changes (see central panel in Fig. 13.1)
from the Eulerian nodes, to the markers, and calculating new marker temperatures.
10. Advecting all markers throughout the mesh according to the globally calculated velocity
field (see Step 3). Components of the stress tensor defined on the markers are recomputed
analytically to account for any local stress rotation.
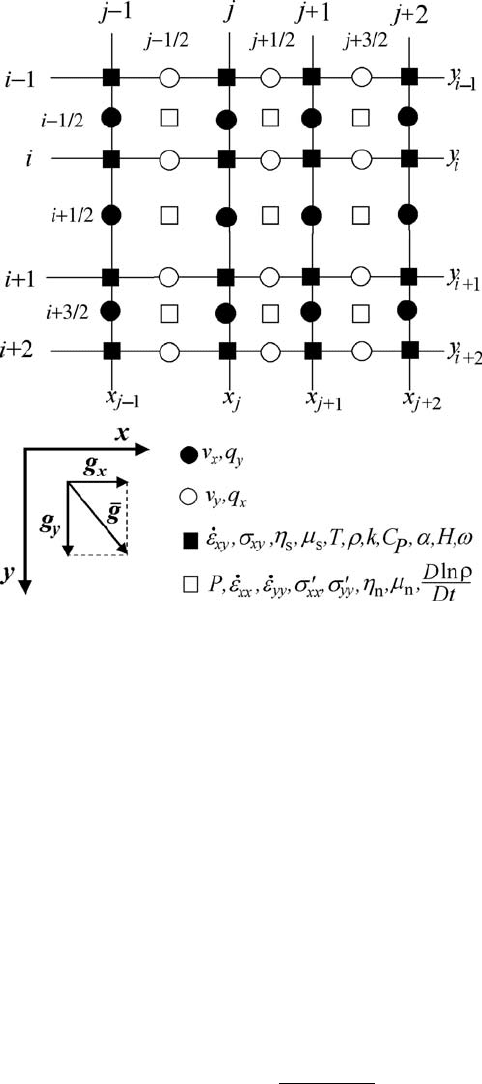
Figure 13.2 shows the geometry of an irregularly spaced, fully staggered numer-
ical grid corresponding to the algorithm. The visco-elasto-plastic code can be
developed on the basis of viscous thermomechanical code (Chapter 11). Therefore,
182 2D implementation of visco-elasto-plastic rheology
Fig. 13.2 Staggered 2D irregularly spaced numerical grid corresponding to the
algorithm presented in Fig. 13.1.
we will concentrate in the following sections on the new modifications that were
made to the code described in Chapter 11.
Step 1: Defining an optimal computational time step
Note that the computational time step t, for the momentum and continuity equa-
tions and the displacement time step t
m
, for markers are generally independent
from each other and can only be related by the condition t
m
≤t. For an elas-
tic medium, the velocity field numerically computed from the Stokes equation
strongly depends on the value of t. This time step influences the numerical
viscosity η
numerical
, which can be derived from Eqs. (13.2), (13.3)
η
numerical
= η
vp
Z =
η
vp
µt
η
vp
+ µt
.

13.2 Structure of visco-elasto-plastic code 183
If t is much less then the Maxwell relaxation time
t
Maxwell
=
η
vp
µ
(13.5)
of a visco-elastic/visco-elasto-plastic medium, then this medium behaves purely
elastically, η
vp
µt and the numerical viscosity depends linearly on the time
step
η
numerical
= µt. (13.6)
In this situation, the smaller we take the time step, the smaller the computational
viscosity becomes which results in larger velocities. Clearly this causes numerical
problems, since if t tends to zero, the velocities will tend towards infinity. Physi-
cally meaningful solutions can be obtained in two ways. The first approach is to take
an extremely small time steps (on the order of seconds or less) and introduce inertial
forces into the system by using Navier–Stokes rather than the Stokes equations.
Numerical models in this case will only be able to address the seismic modes of
deformation, within a very limited period of time (hours, days), which is obviously
objectionable if we want to model geodynamic processes that last for millions and
even billions (as e.g. mantle convection) of years. The second approach (e.g. Kaus
and Becker, 2007) is (when possible) to choose t in such a manner that it will be
significantly shorter than the Maxwell time of the rheologically strongest materials
that are present in the numerical experiment (e.g. a high-viscosity lithosphere), but
significantly larger than the Maxwell time of any rheologically weak materials (e.g.
low-viscosity asthenosphere). In this case, the weak materials satisfy the condition
η
vp
µt and they will behave purely viscously in a broad range of t, such that
their numerical viscosity is independent of the time step
η
numerical
= η
vp
, (13.7)
which will tend to stabilise the velocity field computed inside the model. For real-
istic variations in viscosity 10
16
<η <10
26
and shear modulus 10
10
<µ<10
11
of solid rocks, this approach allows one to have geologically relevant computational
time steps on the order of 10
1
–10
5
years.
It should also be pointed out that the actual numerical viscosity contrast in
experiments with visco-elastic materials
min (η
vp(min)
,tµ
min
) ≤ η
numerical
≤ min (η
vp(max)
,tµ
max
), (13.8)
is typically reduced compared to purely viscous experiments
η
vp(min)
≤ η
numerical
≤ η
vp(max)
. (13.9)
This contrast can be further reduced by decreasing the computational time step
t. This actually makes the visco-elastic numerical experiments computationally

184 2D implementation of visco-elasto-plastic rheology
‘easier’ than the purely viscous ones. On the other hand, the visco-elastic numerical
solutions become equivalent to the viscous one if we choose very large computa-
tional time steps, which are bigger than the maximal Maxwell relaxation time (Eq.
13.5) estimated locally (e.g. on markers) within the model.
Step 2: Interpolation of scalar fields, vectors and tensor fields
According to our algorithmic approach, the temperature field as well as components
of the σ
ij
and ˙ε
ij
tensors are represented by values assigned to the markers. The
effective values of all these parameters at the Eulerian nodal points are interpolated
from the markers at each time step. As in the viscous code, we favour local
interpolation schemes (within half grid distance) for some parameters: viscosity,
shear modulus and deviatoric stress components. In order to avoid non-physical
‘rigid boundary’ effects on interfaces between high-η-low-µ and low-η-high-µ
materials, one should use a harmonic average rather than arithmetic mean for the
shear modulus (see Eq. (8.18), Fig. 8.8 for notations)
µ
(i,j)
=
m
w
m(i,j)
m
1
µ
m
w
m(i,j)
. (13.10)
As in the viscous code, both the viscosity (η) and shear modulus (µ) are defined at
different points (cf. open and solid squares in Fig. 13.2) when used for computing
the normal and shear components of the deviatoric stress tensor. The viscosity,
shear modulus and the respective stress and strain rate components for these nodal
points are interpolated from markers found around the nodes at a distance less than
half of the local Eulerian grid step (see dashed boundary in Fig. 8.8).
Step 3: Solving the momentum and continuity equations
In the case of 2D visco-elasto-plastic compressible fluid, the solution of Stokes
equations (11.1) and (11.2) does not change. The only alteration concerns the
expressions for the deviatoric stresses and strain rates
σ
xx
= 2η
vp
˙ε
xx
Z + σ
o
xx
(
1 − Z
)
=−σ
yy
, (13.11)
σ
xy
= 2η
vp
˙ε
xy
Z + σ
o
xy
(
1 − Z
)
= σ
yx
, (13.12)
˙ε
xx
=
1
2
∂v
x
∂x
−
∂v
y
∂y
=−˙ε
yy
, (13.13)
˙ε
xy
=
1
2
∂v
x
∂y
+
∂v
y
∂x
. (13.14)
13.2 Structure of visco-elasto-plastic code 185
The conservation of mass is approximated by a compressible time-dependent 2D
continuity equation
D ln ρ
Dt
+
∂v
x
∂x
+
∂v
y
∂y
= 0. (13.15)
The conservative FD representation of the momentum equations (Eqs. (11.4),
(11.5)) modified for a visco-elasto-plastic rheology with Equations (13.11)–(13.14)
is as follows (see Fig. 13.2 for the indexing of the grid points):
x-Stokes equation (11.4)
∂
∂x
2η ˙ε
xx
Z
i+1/2,j
+
∂
∂y
(2η ˙ε
xy
Z)
i+1/2,j
− 2
P
i+1/2,j +1/2
− P
i+1/2,j −1/2
x
j+1
− x
j−1
=−
∂
∂x
σ
o
xx
(1 − Z)
i+1/2,j
−
∂
∂y
σ
o
xy
(1 − Z)
i+1/2,j
−
ρ
i,j
+ ρ
i+1,j
2
g
x
,
(13.16)
∂
∂x
2η ˙ε
xx
Z
i+1/2,j
= 4
η ˙ε
xx
Z
i+1/2,j +1/2
−
η ˙ε
xx
Z
i+1/2,j −1/2
x
j+1
− x
j−1
,
∂
∂x
σ
o
xx
(
1 − Z
)
i+1/2,j
= 2
σ
o
xx
(
1 − Z
)
i+1/2,j +1/2
−
σ
o
xx
(
1 − Z
)
i+1/2,j −1/2
x
j+1
− x
j−1
,
∂
∂y
(2η ˙ε
xy
Z)
i+1/2,j
= 2
[η ˙ε
xy
Z]
i+1,j
− [η ˙ε
xy
Z]
i,j
y
i+1
− y
i
,
∂
∂z
σ
o
xy
(
1 − Z
)
i+1/2,j
=
σ
o
xy
(
1 − Z
)
i+1,j
−
σ
o
xy
(
1 − Z
)
i,j
y
i+1
− y
i
,
σ
o
xx
(
1 − Z
)
i+1/2,j +1/2
=
η
n(i+1/2,j +1/2)
σ
o
xx
(i+1/2,j +1/2)
tµ
n
(i+1/2,j +1/2)
+ η
n
(i+1/2,j +1/2)
,
σ
o
xy
(
1 − Z
)
(i,j)
=
η
s(i,j)
σ
o
xy(i,j)
tµ
s(i,j)
+ η
s(i,j)
,
η ˙ε
xx
Z
i+1/2,j +1/2
=
tµ
n(i+1/2,j +1/2)
η
n(i+1/2,j +1/2)
˙ε
xx(i+1/2,j +1/2)
tµ
n(i+1/2,j +1/2)
+ η
n(i+1/2,j +1/2)
,
[η ˙ε
xy
Z]
(i,j)
=
tµ
s(i,j)
η
s(i,j)
˙ε
xy(i,j)
tµ
s(i,j)
+ η
s(i,j)
,
˙ε
xx(i+1/2,j +1/2)
=
v
x (i+1/2,j+1)
−v
x (i+1/2,j)
2(x
j+1
− x
j
)
−
v
y (i+1,j+1/2)
−v
y (i,j +1/2)
2(y
i+1
− y
i
)
,
˙ε
xy(i,j)
=
v
x (i+1/2,j)
− v
x (i−1/2,j)
y
i+1
− y
i−1
+
v
y (i,j +1/2)
− v
y (i,j −1/2)
x
j+1
− x
j−1
,

186 2D implementation of visco-elasto-plastic rheology
where σ
o
xy
and σ
o
xx
are the deviatoric stress tensor components from the previ-
ous time step (corrected for advection and rotation), which are interpolated from
markers; t is the computational time step. Discretisation of the y-Stokes equation
(11.5) is analogous to Eq. (13.16) (derive as an exercise).
The time-dependent compressible continuity Eq. (13.15) is discretised as fol-
lows
v
x (i+1/2,j+1)
− v
x (i+1/2,j)
x
j+1
− x
j
+
v
y (i+1,j+1/2)
− v
y (i,j +1/2)
y
i+1
− y
i
=−
D ln ρ
Dt
i+1/2,j +1/2
,
(13.17)
where
D ln ρ
Dt
are substantive density changes (e.g. Eq. (12.52)) interpolated from
markers.
As in the viscous code, the global matrix is solved by a highly accurate, direct
method and the numbering of unknowns in this global matrix remains the same.
Step 5: Interpolation of stress changes from nodes to markers
After defining the material displacement time step t
m
, the changes in the effective
stresses and new stress fields for the Eulerian nodes are calculated at the respective
nodal points according to Eq. (13.2)as
σ
xx(i+1/2,j +1/2)
=
2η
n(i+1/2,j +1/2)
˙ε
xx(i+1/2,j +1/2)
− σ
o
xx(i+1/2,j +1/2)
×
µ
n(i+1/2,j +1/2)
t
m
η
n(i+1/2,j +1/2)
+ µ
n(i+1/2,j +1/2)
t
m
, (13.18)
σ
xy(i,j)
=
2η
s(i,j)
˙ε
xy(i,j)
− σ
o
xy(i,j)
µ
s(i,j)
t
m
η
s(i,j)
+ µ
s(i,j)
t
m
, (13.19)
σ
xx(i+1/2,j +1/2)
= σ
o
xx(i+1/2,j +1/2)
+ σ
xx(i+1/2,j +1/2)
, (13.20)
σ
xy(i,j)
= σ
o
xy(i,j)
+ σ
xy(i,j)
. (13.21)
The corresponding stress increments for the markers are then added from the nodes
using a standard first-order interpolation scheme (Fig. 8.9, Eq. (8.19)) and the
newly updated values of stress components σ
xx(m)
and σ
xy(m)
are thus obtained for
markers. Other stress components are not stored on markers since they are obtained
by using the standard relations σ
yy
=−σ
xx
and σ
yx
= σ
xy
.
The interpolation of the calculated stress component changes from the Eulerian
nodal points to the Lagrangian markers is similar to the temperature interpolation
strategy described in Chapter 10 and effectively reduces the problem of numerical
diffusion and non-physical subgrid oscillations. It uses a subgrid stress relaxation
operation occurring over a characteristic Maxwell time. In order to define this
operation, stress changes computed from Eqs. (13.18), (13.19) are decomposed into