Georgi, Howard. Physics 16 - Mechanics and Special Relativity (англ.)
Подождите немного. Документ загружается.


to the Euler-Lagrange equation. Often, we can identify this quantity with the energy. We will do
this first for a single degree of freedom, and then extend the result to systems with more degrees
of freedom.
Consider a system with a single degree of freedom described by the Lagrangian
L(q, ˙q, t) (54)
for some single coordinate q, and construct the quantity
F = ˙q
∂L
∂ ˙q
− L (55)
In general, F may depend on q, ˙q and t. Let us now ask how F changes with time, by taking the
total derivative
d
dt
F =
d
dt
Ã
˙q
∂L
∂ ˙q
!
−
d
dt
L (56)
In the first term on the right hand side of (56), we use the product rule to write
d
dt
Ã
˙q
∂L
∂ ˙q
!
= ¨q
∂L
∂ ˙q
+ ˙q
d
dt
∂L
∂ ˙q
(57)
In the second term on the right hand side of (56), we use the fact that the t dependence of L comes
from the explicit t dependence, and also from the implicit dependence on t through q and ˙q:
d
dt
L = ¨q
∂L
∂ ˙q
+ ˙q
∂L
∂q
+
∂L
∂t
(58)
The relation (58) is an example of one of those multivariable calculus things that will make your
eyes glaze over if you just stare at the symbols. But if you translate it into words, it makes perfect
sense. It says that the total rate of change of F with t is the rate of change of ˙q times the rate at
which F changes with ˙q plus the rate of change of q times the rate at which F changes with q
plus the rate of change from the explicit time dependence. It is simply a matter of adding up all
the possible sources of time variation of the function F . Subtracting (58) from (57) and using the
Lagrange equation
d
dt
∂L
∂ ˙q
=
∂L
∂q
(59)
we get
d
dt
F = −
∂L
∂t
(60)
Thus if L does not depend on time EXPLICITLY, but only implicitly through the time dependence
of q and ˙q, the function F is constant for the trajectory.
It is important to understand what is meant here by the words “explicit” and “implicit”. Explicit
time dependence occurs only if there is some physics in the problem that changes with time. For
example, the Lagrangian we discussed above in (27) for the particle sliding on a vertically rotating
frictionless rod depends explicitly on time — the Lagrangian has a sin ωt in it! On the other hand,
13
ANY function of q and ˙q depends implicitly on time, because q and ˙q for the trajectory depend on
time.
Usually, this function F is the Energy! For example, suppose we look at the Lagrangian for a
particle moving in a potential
L(x, ˙x) =
m
2
˙x
2
− V (x) (61)
For this Lagrangian, the function F is
˙x
∂
∂ ˙x
L(x, ˙x) − L(x, ˙x) = ˙x m ˙x − L(x, ˙x) =
m
2
˙x
2
+ V (x) (62)
which is the energy, as promised.
For example, in the example of the bead on the horizontally rotating rod, where the Lagrangian
is
L(`,
˙
`) =
1
2
m
³
˙
`
2
+ `
2
ω
2
´
(63)
the construction of (55) gives
F =
˙
` m
˙
` −
1
2
m
³
˙
`
2
+ `
2
ω
2
´
=
1
2
m
³
˙
`
2
− `
2
ω
2
´
(64)
You can check explicitly that this quantity is conserved for the general solution to (21).
These two examples are rather different. In the second, the fact that the Lagrangian has no
explicit time dependence is an accident, arising from the cancellation of the ωt dependence that we
talked about earlier. This is related to the fact that F in this case is not the kinetic plus the potential
energy, but rather a curious combinations of the terms in the kinetic energy. It is conserved, but the
physical interpretation is obscure.
In the first example, however, the particle moving in a potential, the Lagrangian does not de-
pend explicitly on t because there is a symmetry of the system. The symmetry in this case is time
translation invariance. In this case, F really is the physical energy. This is the first of several impor-
tant examples we will see in this course of the connection between a symmetry and conservation
law. We will explore this further on Thursday.
For the vertically rotating rod, because L in (27) depends on time explicitly because of the
factor of sin ωt, F is not conserved.
The construction of the energy function makes it clear how to deal with more degrees of free-
dom. If q has an index, q
j
where j goes from 1 to n, the analogous construction for the function F
is
F =
X
j
˙q
j
∂L
∂ ˙q
j
− L (65)
It must have this form for the analog of (56)-(60) to be valid, because the analog of (58) for more
degrees of freedom is
d
dt
L =
X
j
¨q
j
∂L
∂ ˙q
j
+
X
j
˙q
j
∂L
∂q
j
+
∂L
∂t
(66)
This requires that the same sum over degrees of freedom appears in the first term in (65). With F
defined as in (65), (60) is still valid.
14
Thus the construction (65) is very general. In fact, it reproduces the usual expression for the
energy as the kinetic plus the potential energy whenever the potential depends only on q
j
and
the kinetic energy is proportional to two powers of the velocity. However, it is really even more
general than that. For any Lagrangian that does not depend explicitly on t, (65) defines a conserved
quantity. And if the explicit t dependence vanishes because of time translation invariance, the
conserved quantity is the energy.
For the system we discussed earlier with two masses connected by a string, one sliding on and
the other hanging below a frictionless table, with Lagrangian (37),
L(`, θ,
˙
`,
˙
θ) =
1
2
(m
1
+ m
2
)
˙
`
2
+
1
2
m
1
`
2
˙
θ
2
− m
2
g` (67)
again there is no explicit time dependence, so we expect a conserved energy. Because there are
two degrees of freedom, we have to use the construction (65), which gives for the conventional
energy, T + U,
F =
˙
` (m
1
+ m
2
)
˙
` +
˙
θ m
1
`
2
˙
θ −
1
2
(m
1
+ m
2
)
˙
`
2
−
1
2
m
1
`
2
˙
θ
2
+ m
2
g`
=
1
2
(m
1
+ m
2
)
˙
`
2
+
1
2
m
1
`
2
˙
θ
2
+ m
2
g`
(68)
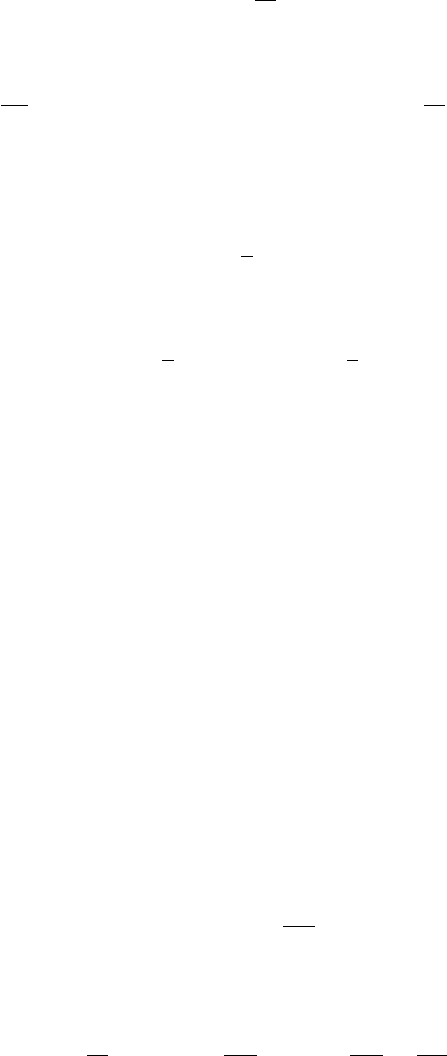
Example - Atwood’s machine
Atwood’s machines are collections of massless ropes, massless pulleys, and masses, like that
shown below:
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
m
1
m
2
•
•
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(69)
15

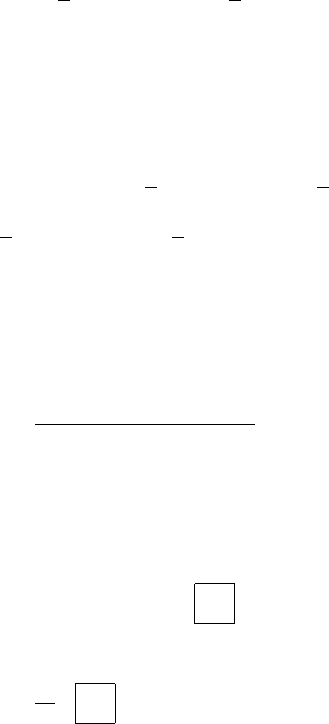
The motion of this Atwood’s machine can be found the old fashioned way, by assigning unknowns
to the various physical quantities in the system, the tension in the ropes at various points.
T
T T
2T
.......................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
m
1
m
2
•
•
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(70)
Note that because the pulleys are massless, the tension T is the same throughout the long rope, and
the rope connected to mass 1 has tension 2T , as shown.
We can now apply F = ma to each of the two masses:
m
1
a
1
= 2T − m
1
g m
2
a
2
= T − m
2
g (71)
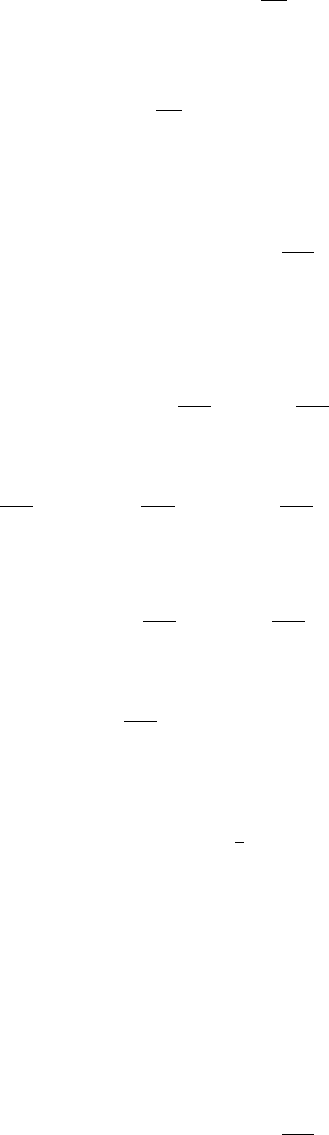
Finally, we have to realize that the two accelerations are related, because if mass 1 moves up a
distance x, mass 2 must move down a distance 2x, because the length of the rope does not change.
Thus if we allow only vertical motions, this is a system with only one degree of freedom, because
x
2
is actually determined once we fix x
1
.
x
2
= −2x
1
+ constant (72)
and the constant can be ignored, or absorbed into the definitions of x
1
and x
2
. It doesn’t affect the
accelerations or the forces. This is illustrated in the diagram below:
2x
1
x
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
m
1
m
2
•
•
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(73)
Thus we can write
a
2
= −2a
1
(74)
16

so that (71) becomes
m
1
a
1
= 2T − m
1
g − 2m
2
a
1
= T − m
2
g (75)
We can now solve these two equations for T and a
1
, and conclude that
a
1
=
2m
2
− m
1
m
1
+ 4m
2
g (76)
and
T =
3m
1
m
2
g
m
1
+ 4m
2
(77)
There is a politically incorrect but amusing story about Atwood’s machine. A physics professor
in an introductory course was describing this derivation to his introductory mechanics class (very
much like Harvard’s Physics 1a), when one of the students asked why anyone should care about
such a random collection of ropes and pulleys and masses. Without missing a beat, the professor
replied that Atwood’s machine had saved more lives than Penicillin — by keeping dumb people
out of medical school!
When you think about it though, this derivation is a bit indirect, because you have to introduce
the quantity T, which you don’t care about. It is no wonder that premedical students find this chal-
lenging. Note how much simpler this would be for them if they were armed with the Lagrangian!
Here they just have to identify the kinetic and potential energies and turn the crank. The potential
energy in this system is
V (x
1
) = m
1
gx
1
+ m
2
gx
2
= (m
1
− 2m
2
)gx
1
(78)
The kinetic energy is
T ( ˙x
1
) =
m
1
2
˙x
2
1
+
m
2
2
˙x
2
2
=
m
1
+ 4m
2
2
˙x
2
1
(79)
Thus
L(x
1
, ˙x
1
) =
m
1
+ 4m
2
2
˙x
2
1
− (m
1
− 2m
2
)gx
1
(80)
Then
∂L
∂x
1
= −(m
1
− 2m
2
)g
∂L
∂ ˙x
1
= (m
1
+ 4m
2
) ˙x
1
(81)
So the Lagrange equation is
0 = −(m
1
− 2m
2
)g − (m
1
+ 4m
2
)¨x
1
(82)
which immediately gives (76). We are lucky that this is not taught in premed physics around the
world — we might end up with a lot of dumb doctors!
17

lecture 8
Topics:
Where are we now?
When is F the energy?
Symmetries and transformations
Example: space translations for one particle
Space translations for two particles
Space translations for many particles
Finding Symmetries
Rotations
Noether’s theorem
Momentum conservation from Noether’s theorem
More on rotations
What functions are invariant?
Where are we now?
We have seen how conserved quantities can arise as the generalized momenta associated with vari-
ables that do not appear in the Lagrangian. Here we will discuss a generalization of this fact, that
is an even more important principle. In Lagrangian mechanics, continuous symmetries lead to
conserved quantities. We have already seen one example of this in our discussion of energy, and
we will begin by making the connection with time translation invariance. We will go on to dis-
cuss symmetries more generally, and also in more detail the specific example of space translation
symmetry, which leads to the conservation of total momentum.
When is F the energy?
Last time we talked about the quantity F , defined by
F =
X
j
˙q
j
∂L
∂ ˙q
j
− L (1)
which when evaluated for solutions to Euler-Lagrange equations satisfies
d
dt
F = −
∂L
∂t
(2)
We noted that F is often the energy. I said this in lecture 7, but I don’t think it got into the notes, so
I thought it worth saying again. Of course, to even get started on this, we have to restrict ourselves
to situations where there are no frictional forces, and therefore nothing is converting kinetic and
potential energy into heat. Since heat is just kinetic energy of random particle motion, this really
just means that we need to look at a system at a sufficiently fundamental level to see all the kinetic
energy explicitly. For now we will take care of this by restricting ourselves to systems described
1
by Lagrangians of the form T − V . Then the first answer is that F is the energy whenever the
kinetic energy T is quadratic in the velocities, ˙q and the potential energy V does not depend on the
velocities. The reason is that the differential operator
z
∂
∂z
(3)
counts the degree in z, because
z
∂
∂z
z
n
= z n z
n−1
= n z
n
(4)
That is, this operator acting on a term that is some power of z just gives the term back multiplied
by the power. When we sum over all the velocities, the differential operator
X
j
˙q
j
∂
∂ ˙q
j
(5)
adds up the powers of all the velocities. When this acts on a function quadratic in the velocities,
every term in the function just gets multiplied by 2. For example
X
j
˙q
j
∂
∂ ˙q
j
˙q
2
1
= ˙q
1
∂
∂ ˙q
1
˙q
2
1
= 2 ˙q
2
1
(6)
and
X
j
˙q
j
∂
∂ ˙q
j
˙q
1
˙q
2
= ˙q
1
∂
∂ ˙q
1
˙q
1
˙q
2
+ ˙q
2
∂
∂ ˙q
2
˙q
1
˙q
2
= ˙q
1
˙q
2
+ ˙q
1
˙q
2
= 2 ˙q
1
˙q
2
(7)
Thus if T is quadratic in the velocities and V is independent of the velocities,
X
j
˙q
j
∂L
∂ ˙q
j
=
X
j
˙q
j
∂
∂ ˙q
j
(T − V ) = 2T (8)
and then
F =
X
j
˙q
j
∂L
∂ ˙q
j
− L = 2T − (T − V ) = T + V = E (9)
and as promised, F is the energy.
At the fundamental level, the kinetic energy is always quadratic in the velocities, because it is
just a sum over all the parts of the system of
1
2
mv
2
. But what can go wrong with this can be seen
in examples like the bead on a rod rotating with fixed angular velocity ω. Sometimes, we have to
separate the variables that describe the system into those that are dynamical - like the position of
the bead along the rod - and those that are imposed by some “external” constraint - like the angle
of the rod, which is fixed whatever is causing the rod to rotate. Then we include include in our list
of coordinates only the dynamical coordinates and put the effect of the others into the Lagrangian
by hand. Then if our external constraint is causing the motion, some of the velocities that appear
in the kinetic energy do not correspond to dynamical coordinates in our Lagrangian, and they are
not included in the sum,
X
j
˙q
j
∂
∂ ˙q
j
(10)
2

In such a case, (9) is not correct, and F is not the energy.
In a system with time translation invariance, however, there can be no time dependent external
constraint. Such a thing would look different at different times and break time translation invari-
ance. Thus time time translation invariance does two things. Not only does it ensure that the
Lagrangian does not depend explicitly on time - which implies that F is conserved. But is also
ensures that the kinetic energy is quadratic in the dynamical velocities, which ensures that F is the
energy. In fact, time translation invariance is the more general answer to the question. Even if L is
not in the form T − V , time translation invariance implies that F is the energy.
Symmetries and transformations
What is a symmetry? We have talked about several examples, so perhaps we should define pre-
cisely what we mean by it. Symmetry is a mathematical statement of some very specific regularity
in a system. A system has a symmetry if there is some transformation you can make that leaves the
system looking exactly as it did before. We tend to regard things with many symmetries as pretty,
like the kalaidoscope that we saw at the beginning of lecture, which has many planes of symmetry.
In the case of mechanics, we have an even more specific meaning in mind. Let us now consider
a class of symmetries in which we make some transformation of the coordinates describing a
system at a fixed time. What this means mathematically is that we define a new set of coordinates
as functions of the original coordinates. The transformation is then a symmetry if the physics looks
exactly the same in terms of the new coordinates as it did in the old coordinates.
We talked briefly about such a transformation when we discussed the double pendulum with
two equal masses in lecture 2. The Lagrangian for the double pendulum for small oscillations
looks approximately like
m
2
³
˙x
2
1
+ ˙x
2
2
´
−
g
`
(x
2
1
+ x
2
2
) −
K
2
(x
1
− x
2
)
2
(11)
This has the property that it is unchanged if we interchange x
1
and x
2
. This is the mathematical
statement of the obvious physical symmetry of the system.
The symmetry of the double pendulum is an example of a discrete symmetry, so-called because
the symmetry is an all or nothing sort of thing. The transformation cannot be made bigger or
smaller - it is fixed by the structure of the symmetry.
It is more even interesting to consider symmetries in which the symmetry transformation can be
made arbitrarily small. Such a thing is called a continuous symmetry, because the transformation
can change the system continuously. By putting arbitrarily small transformations together, we can
get a whole set of transformations which, unlike the symmetry of the double pendulum, depend on
a parameter that can be continuously varied.
An example is translations. We think that space probably looks the same everywhere, and we
could describe this by saying that there is a symmetry in which we move everything by the same
arbitrary vector and we would end up with a completely equivalent physical system.
Here is the general theoretical setup (we’ll discuss examples in more detail shortly). Consider
a system of n degrees of freedom described by coordinates q
j
for j = 1 to n. Let’s assume
3

that there is a symmetry in which each of the coordinates changes only a tiny bit, proportional
to an infinitesimal parameter, ² and that the changes involve only the current configuration of the
system. What we mean precisely by infinitesimal is that ² is sufficiently small that we can always
ignore terms of order ²
2
. Translating what we have just assumed into mathematics, we consider a
symmetry in which the coordinates q
j
are transformed as follows:
q
j
→ ˜q
j
= q
j
+ ² κ
q
j
(q) . (12)
That is each of the coordinates changes by ² times a function κ
q
j
(q) of the qs. The κ
q
j
(q) tells you
how the variable q
j
changes under the transformation. The transformation (12) is a symmetry of
the Lagrangian if
L(˜q,
˙
˜q) = L(q, ˙q) (13)
Example: space translations for one particle
Here is a simple (perhaps even boring) example. Consider a particle with mass m moving along
the x-axis in a potential. When does this system have a symmetry under the infinitesimal transfor-
mation
x → ˜x = x + ² ? (14)
This transformation has the form of (12) with κ(x) = 1. The Lagrangian looks like this:
L(x, ˙x) =
1
2
m ˙x
2
− V (x) (15)
The condition that (14) is a symmetry is then
L(˜x,
˙
˜x) = L(x, ˙x) (16)
Because κ(x) is just a constant, we have
˙
˜x =
d
dt
˜x = ˙x (17)
and so (16) becomes
L(x + ², ˙x) = L(x, ˙x) (18)
for infinitesimal ² . Because the ˙x doesn’t change and kinetic energy is the same on both sides, so
this condition only effects V -
V (x + ²) = V (x ) (19)
But because this is supposed to be true for any infinitesimal ², we can use the Taylor expansion
(surprise, surprise) to rewrite (19) as
V (x + ²) = V (x ) + ² V
0
(x) + O(²
2
) = V (x) (20)
If this is to be satisfied for infinitesimal ², we must have
V
0
(x) = 0 (21)
4

so that V (x) is just a constant and the particle has no force on it at all. In this case, mv is a con-
served momentum. We will see how this connection between symmetry and conserved momentum
generalizes to more complicated (and more interesting) situations.
Another reason that I wanted to look at this simple system in detail is to emphasize the dif-
ference between continuous and discrete symmetries. Suppose that instead of being constant, the
potential in (15) is
V (x) = − E
0
cos(x/`) (22)
where E
0
and ` are constants. This system also has a symmetry under space translations of the
form
x → ˜x = x + 2πn` (23)
for any integer n. But here we clearly cannot conclude that V (x) is constant because we started
with an example with the symmetry that is not constant. Except at special points where the particle
is in equilibrium, there is a force on it. There is no conserved momentum (though energy is still
conserved because the Lagrangian does not depend explicitly on t). The difference between this
and the previous example is that this is a discrete symmetry. The changes in x that leave the
Lagrangian invariant are a discrete set. They cannot be varied continuous, and they cannot be
made infinitesimally small. Thus we cannot use the Taylor expansion argument to conclude that
V (x) is constant.
Space translations for two particles
Space translation symmetry becomes interesting and important when there is more than one par-
ticle. Let us now consider a one-dimensional system of 2 particles, with positions x
1
and x
2
, so
that q
j
= x
j
for j = 1 to 2. A space translation in the x direction just adds the same infinitesimal
constant, ², to both x
1
and x
2
— so the transformation has the form
x
1
→ ˜x
1
= x
1
+ ² , x
2
→ ˜x
2
= x
2
+ ² . (24)
Notice that this satisfies (12), with q
1
= x
1
, q
2
= x
2
and κ
x
1
(x) = κ
x
2
(x) = 1. This is a symmetry
of any Lagrangian that depends only on ˙x
1
and ˙x
2
and the difference between x
1
−x
2
, for example
L(x, ˙x) =
m
1
2
˙x
2
1
+
m
2
2
˙x
2
2
− V (x
1
− x
2
) (25)
The transformation (24) is a symmetry of the kinetic energy because ² is a constant, so that
˙
˜x
1
= ˙x
1
,
˙
˜x
2
= ˙x
2
. (26)
It is a symmetry of the potential energy because the ²s cancel when we subtract one coordinate
from another, so that
˜x
1
− ˜x
2
= (x
1
+ ²) −(x
2
+ ²) = x
1
− x
2
. (27)
Putting (26) and (27) together implies
L(˜x,
˙
˜x) = L(x, ˙x) . (28)
5