Финаев В.И. Аналитические и имитационные модели
Подождите немного. Документ загружается.


21
участвовать не все элементы Х и Y. Для задания
соответствия необходимо указать:
- множество Х, элементы которого сопоставляются с
элементами другого множества;
- множество Y, с элементами которого сопоставляются
элементы множества Х;
- множество Q⊆Х×Y, определяющее закон, согласно
которому осуществляется соответствие, т.е.
перечисляющее все пары (х,y), участвующие в
сопоставлении.
Соответствие, обозначаемое через q, представляет собой
тройку множеств q=(Х,Y,Q), где Х – область отправления
соответствия, Y – область прибытия соответствия, Q –
график соответствия, Q⊆Х×Y. Очевидно, что проекция
Пр
1
Q⊆Х, а Пр
2
Q⊆Y, причем множество Пр
1
Q называется
областью определения соответствия, а проекция Пр
2
Q –
областью значений соответствия. Способы задания
соответствий следующие.
При теоретико-множественном задании определяют
множества Х={х
1
,х
2
,…,х
n
}, Y={y
1
,y
2
,…,y
m
} и график
Q={(х
i
,y
j
)}, х∈Х, y∈Y
)n,1i( =
,
)m,1j( =
.
При матричном способе задания соответствие задается
в виде матрицы инцидентности R
Q
, которая имеет вид
прямоугольной таблицы размером n×m. Элементы х
i
∈Х
соответствуют строкам матрицы R
Q
, а элементы y
j
∈Y
соответствуют столбцам. На пересечении х
i
строки и y
j
столбца ставится элемент r
ij
=1, если элемент (х
i
,y
j
)∈Q, и
r
ij
=0, если (хi,y
j
)∉Q.
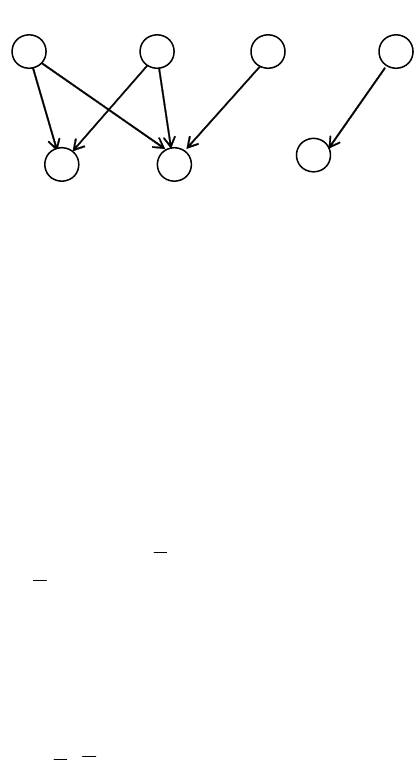
При графическом способе соответствие задается в виде
рисунка (см. рис. 1.4.), на котором элементы х
i
∈Х – кружки
одной линии, элементы y
j
∈Y – кружки другой линии, а
каждая двойка (х
i
,y
j
)∈Q обозначается стрелкой, идущей от
22
кружка х
i
к кружку y
j
. Такое представление называется
графиком.
Если сопоставлять элементы y∈Y элементам множества
Х, то получим соответствие q
-1
=(Y,Х,Q
-1
), обратное
соответствию q (инверсия соответствия q).
y
1
y
2
y
3
x
1
x
2
x
3
x
4
Х={х
1
,х
2
,х
3
,х
4
}, Y={y
1
,y
2
,y
3
}, Q={(х
1
,y
1
), (х
1
,y
2
), (х
2
,y
1
),
(х
2
,y
2
), (х
3
,y
2
), (х
4
,y
3
)}.
Рис. 1.4
Исходя из приведенных выше определений множеств
входных параметров Х=Х
1
×Х
2
×…×Х
m
, выходных
параметров Y=Y
1
×Y
2
×…×Y
r
, состояний Z=Z
1
×Z
2
×…×Z
n
определим задание моделей функций переходов и выходов,
как соответствий. Модель системы в виде функции
переходов задана соответствием
f
П
=(Х
1
×Х
2
×…×Х
m
,Z
1
×Z
2
×…×Z
n
,F
П
). (1.5)
Данная модель устанавливает соответствие f
П
между
каждым элементом
x
={х
1
,х
2
,…,х
m
}∈Х
1
×Х
2
×…×Х
m
и
элементом
z
={z
1
,z
2
,…,z
n
}∈Z
1
×Z
2
×…×Z
n
. F
П
– график
соответствия f
П
. Модель системы в виде функции
переходов может быть задана также в виде
f
П
={(Х
1
×Х
2
×…×Х
m
),(Z
1
×Z
2
×…×Z
n
),
(Z
1
×Z
2
×…×Z
n
),F
П
}, (1.6)
т.е. модель устанавливает соответствие f
П
между каждым
элементом (
x
,
z
)∈[(Х
1
×Х
2
×…×Х
m
)×(Z
1
×Z
2
×…×Z
n
)] и

23
элементом
z
={z
1
,z
2
,…,z
n
}∈Z
1
×Z
2
×…×Z
n
. Модель системы
в виде функции выходов задана соответствием
f
В
={[(Х
1
×Х
2
×…×Х
m
),(Z
1
×Z
2
×…×Z
n
)],
(Y
1
×Y
2
×…×Y
r
),F
В
}. (1.7)
Модель устанавливает соответствие f
В
между каждым
элементом (
x
,
z
) из множества [(Х
1
×Х
2
×…×Х
m
),
(Z
1
×Z
2
×…×Z
n
)] и элементом
y
={y
1
,y
2
,…,y
r
}∈Y
1
×Y
2
×
×…×Y
r
. F
В
– график соответствия f
В
.
Модель системы в виде функции выходов может быть
задана еще и в таком виде:
f
В
={[(Х
1
×Х
2
×…×Х
m
)×(Z
1
×Z
2
×…×Z
n
)],[Z
1
×Z
2
×…×Z
n
],
(Y
1
×Y
2
×…×Y
r
),F
В
), (1.8)
т.е. модель в данном случае устанавливает соответствие f
В
между каждым элементом {(
x
,
z
),
z
} из множества
{[(Х
1
×Х
2
×…×Х
m
), (Z
1
×Z
2
×…×Z
n
)], [Z
1
×Z
2
×…×Z
n
]} и
элементом
y
={y
1
,y
2
,…,y
r
}∈Y
1
×Y
2
× ×…×Y
r
.
Модель системы в виде функции переходов может быть
записана еще в следующем виде:
)⎯⎯→
П
f
11 m 11 n
{(X , X ,..., X ) (Z , Z ,...,Z
(1.9)
или в виде
)} )×⎯⎯→
П
f
11 m 11 n 11 n
{(X , X ,..., X ) (Z , Z ,..., Z (Z , Z ,..., Z
. (1.10)
Модель системы в виде функции выходов может быть
задана и в таком виде:
)} )×⎯⎯→
В
f
11 m 11 n 11 r
{(X , X ,..., X ) (Z , Z ,..., Z (Y ,Y ,...,Y
(1.11)
или в виде
)]
×
×
11 m 11 n
{[(X , X ,..., X ) (Z ,Z ,..., Z
)} )×⎯⎯→
В
f
11 n 11 r
(Z ,Z ,...,Z (Y ,Y ,...,Y
. (1.12)
24
2. КЛАССИЧЕСКИЕ МАТЕМАТИЧЕСКИЕ
МОДЕЛИ
2.1. Примеры моделей в виде
дифференциальных уравнений
2.1.1. Модель электрического колебательного
контура. Классические разделы высшей математики
связаны с решением и исследованием дифференциальных
уравнений. Дифференциальные уравнения нашли широкое
применение при моделировании технических, социальных,
экономических и других систем.
Классическая теория автоматического управления
применяет модели объектов в виде дифференциальных
уравнений и позволяет решать задачи управления, исследуя
дифференциальные уравнения [5]. Вид уравнений может
быть очень сложным и для решения и исследования
моделей, заданных дифференциальными уравнениями,
применяется компьютерное моделирование. Применяют
специальные пакеты прикладных программ, например
MatLab, Omola, Dymola, Dymosim, Model Vision Studium,
язык UML и другие.
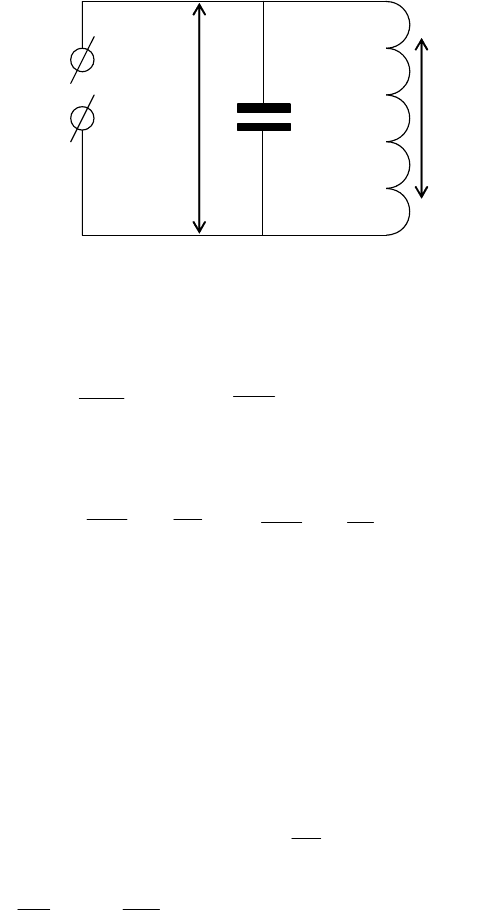
Колебательный контур, известный в электротехнике,
представляют в виде схемы, приведенной на рис. 2.1.
Определены параметры колебательного контура:
- С – емкость конденсатора;
- L – индуктивность катушки;
- U
С
(t) – напряжение на конденсаторе;
- I
L
(t) – ток в катушке;
- U(t)
ИСТ
– напряжение внешнего источника.
Определим модель колебательного контура, которая
позволит моделировать колебательный процесс в контуре.
25
U
ист
(t)
U
C
(t)
C
I
L
(t)
L
Рис. 2.1
В соответствии с законом Кирхгофа запишем
следующие соотношения:
L
C
I
dt
dU
С −=
,
ИСТC
L
UU
dt
dI
L +−=
.
Введем координаты z
1
=U
С
, обозначим U
ИСТ
/L=х(t) и
получим систему дифференциальных уравнений:
dt
z
dt
dz
21
−=
,
)t(x
L
z
dt
dz
12
+−=
.
(2.1)
Если U
ИСТ
=0, то х(t)=0 и система (2.1) описывает
свободные колебания. Рассматривая х(t) как сигнал
управления, получим описание динамики колебаний в
каждый момент времени t. Решая систему (2.1), можно
получить аналитический вид функций z
1
(t) и z
2
(t).
Если рассматривать U(t)
ИСТ
как единичное ступенчатое
воздействие, R - внутреннее сопротивление источника, то
можно показать, что напряжение на конденсаторе С будет
изменяться по формуле [6]:
-δt
C11
1
δ
U (t) = 1 - e (cosω t+ sinω t)
ω
, (2.2)
где
R
δ =
2L
,
2
0
1
ω =
LC
,
−
222
10
ω = ωδ
.

26
Дальнейшее исследование модели связано с разработкой
программы, которая будет рассчитывать и выводить график
функции U
С
(t) в зависимости от параметров R, L и С, тем
самым позволяя исследовать время переходного процесса
(время затухания колебаний) в данном контуре.
2.1.2. Модель размножения микроорганизмов. Из
результатов изучения развития популяций
микроорганизмов известно, что скорость размножения
микроорганизмов пропорциональна числу уже имеющихся
на данное время. Рассмотрим моделирование процесса
роста популяций микроорганизмов.
Пусть E(t) − число особей в момент времени t. Скорость
размножения определим как отношение величины E(t+∆t)-
E(t) к величине Δt при Δt→0. Исходя из этого условия,
получим уравнение в частных приращениях (модель роста
популяций в частных приращениях):
).t(kE
t
)t(E)tt(E
=
Δ
−Δ
+
Переходим к предельному выражению
)t(kE
t
)t(E)tt(E
lim
0t
=
Δ
−Δ+
→Δ
и получаем модель роста популяций микроорганизмов в
виде дифференциального уравнения (общий вид):
)t(kE
dt
)t(dE
=
. (2.3)
Решая дифференциальное уравнение (2.3), можно
получить аналитическое уравнение роста популяций и
провести исследования. При начальных условиях t=0,
E(t=0)=E
0
получим решение модели роста популяций в
виде аналитического выражения
E(t)=E
0
e
kt
. (2.4)
Вид уравнения (2.4) показан на рис. 2.2.

27
t
Е(t)
Е
0
Рис. 2.2
Если при t=0 начальное число популяций
микроорганизмов E=E
0
, то можно определить время Т, за
которое число особей удвоится по формуле
2E
0
=E
0
e
kt
, → 2=e
kT
, → T=(1/k)ln2.
Заметим, что при получении этой модели не
учитывалось ограничение, связанное с требуемым
количеством питательных средств для существования
микроорганизмов, а также воздействия внешней среды
(например, иммунные силы организма).
2.1.3. Модель динамики боя. Проведение военных
сражений связано с расчетами, поэтому разрабатывают
модели боевых действий [2].
Пусть m
1
- число боевых единиц красных; m
2
- число
боевых единиц синих, сохранившихся непораженными к
моменту времени t; λ
1
- средняя скорострельность для
одной боевой единицы красных; λ
2
- средняя
скорострельность для одной боевой единицы синих. Цели
поражаются с вероятностью р
1
- красными и вероятностью
р
2
- синими. Рассмотрим модель, отображающую динамику
боя.
Интенсивности успешных выстрелов определятся как

28
L
1
=λ
1
р
1
, L
2
=λ
2
р
2
.
Число выведенных боевых единиц красных Δm
1
за время
Δt составит λ
2
р
2
Δtm
2
, а число выведенных из строя боевых
единиц синих Δm
2
за время Δt составит λ
1
р
1
Δtm
1
, Тогда
Δm
1
=-λ
2
р
2
Δtm
2
, Δm
2
=-λ
1
р
1
Δtm
1
. (2.4)
Уравнения (2.4) - модель динамики боя в частных
приращениях. От уравнения (2.4) осуществим переход к
дифференциальным уравнениям.
Разделив правую и левую части на Δt, получим
1
22 2
Δm
=-λ pm
Δt
,
2
11 1
Δm
=-λ pm
Δt
.
Взяв пределы при Δt→0, получим дифференциальные
уравнения, моделирующие динамику боя
1
22
dm
=-Lm
dt
,
2
11
dm
=-Lm
dt
(2.5)
Уравнения (2.5) называются уравнениями Ланчестера.
2.1.4. Модель движения ракеты. Движение ракеты,
запускаемой в космос, описывается её координатами х и y,
проекциями вектора скорости V на координатные оси V
Х
и
V
Y
. Пусть m - масса ракеты; u величина тяги; ϕ - угол
между направлением тяги и осью 0х; f(u) - секундный
расход массы. Рассмотрим построение модели,
отображающей динамику полета.
Проекции скоростей являются производными от
движения по координатам, следовательно
x
V
dt
dx
=
,
y
V
dt
dy
=
.
В соответствии с уравнением Ньютона запишем:
;sinUF
dt
dV
m
y
y
ϕ+= ϕ+= cosUF
dt
dV
m
x
x
.
Расход массы определится уравнением

29
)u(f
dt
dm
−=
.
Таким образом, моделью движения ракеты является
система уравнений:
,cosUF
dt
dV
m ,V
dt
dy
,V
dt
dx
x
x
yx
ϕ+===
)u(f
dt
dm
,sinUF
dt
dV
m
y
y
−=ϕ+=
при начальных условиях х(t
0
)=х
0
, y(t
0
)=y
0
, m(t
0
)=m
0
,
V
х
(t
0
)=V
х0
, V
y
(t
0
)=V
y0.
Управление траекторией ракеты осуществляется за счет
регулирования величины и направления силы тяги двигателя,
U
и ϕ - управляющие параметры
.
Во всех приведенных выше примерах применение
компьютерного моделирования сводится к получению
аналитических уравнений, программированию с целью
получения решений при заданных наборах входных
параметров, визуализации результатов решения.
2.2. Классические модели в виде
дифференциальных уравнений
Дифференциальные уравнения описывают процесс
перехода динамической системы из одного состояния в
другое и изменение выходного параметра. Могут
рассматриваться системы, в которых моделируют только
изменение состояний или только изменение выходного
параметра. Могут рассматриваться системы, в которых
моделируют изменение и состояний, и выходного
параметра. Математические схемы такого вида отражают
динамику изучаемой системы и носят название D-схем от
английского слова dynamic (динамика).

30
Пусть входные параметры (сигналы, координаты и
прочее) заданы множеством Х(t)={х
1
(t),х
2
(t),...,х
m
(t)}, а
выходные параметры заданы множеством
Y(t)={y
1
(t),y
2
(t),..., y
r
(t)}. Модель динамической системы,
определяемая обыкновенными дифференциальными
уравнениями в общем виде, задается следующим образом.
Задают дифференциальные уравнения, определяющие
движение системы в пространстве состояний
i
i1 n 1 m
dz
= f (t, z (t),..., z (t),x (t),..., x (t)), i = 1,n
dt
. (2.6)
Каждое i-е дифференциальное уравнение задается в
общем виде функцией f
i
, зависящей от времени t,
компонент вектора состояний Z={z
1
(t),z
2
(t),…,z
n
(t)} и
компонент вектора входных параметров
Х(t)={х
1
(t),х
2
(t),...,х
m
(t)}. Задают соотношения,
определяющие изменение выходных параметров
jj1 n 1 m
y = g (t, z (t),..., z (t), x (t),...,x (t)), j = 1,r
. (2.7)
Для решения дифференциальных уравнений системы
(2.6), определения изменения во времени выходных
параметров необходимо для момента t(0)=t
0
задать
начальные состояния
00 0
10 1 20 2 n0 n
z(t)=z, z(t)=z, ..., z(t)=z
,
а также функции, определяющие изменения во времени
компонент вектора входных параметров Х(t) на
полуинтервале (t
0
,t]:
000 0
ttt t
t1t2t mt
(X(t)] = {(x (t)] ,(x (t)] ,...,(x (t)] }
.
Если для каждого уравнения системы (2.6) выполнены
условия существования и единственности решений, то эти
решения в общем случае имеют вид
o
00 0 t
ii012n t
z (t) = j (t,t , z , z , ...,z ,(X(t)] ), i = 1,n
. (2.8)
Обозначим решения системы дифференциальных
уравнений (2.6), проходящие в момент времени t
0
через