Ellis,J. Pressure transients in water engineering, A guide to analysis and interpretation of behaviour
Подождите немного. Документ загружается.


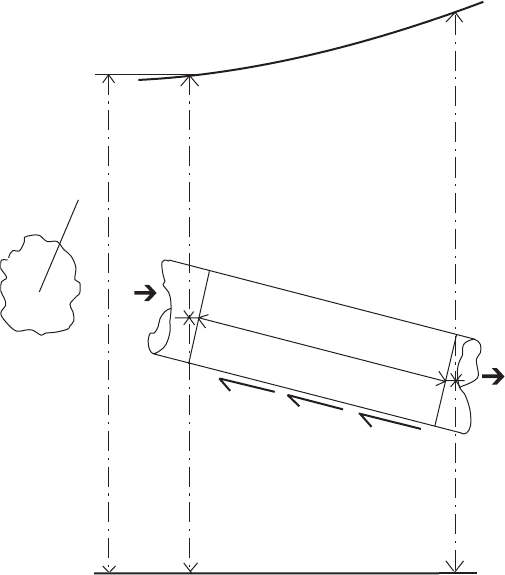
the valve to be closed at some rate that caused flow to decelerate at
a rate dV=dt and producing an inertial head rise H
i
at the upstream
valve face. Forces acting upon the body of liquid contained in the
pipeline are:
Pipeline resistance ¼gAhf ¼gAfLV
2
=ð2gDÞ
Force imposed at the valve face ¼gAH
i
Inertia force ¼AL dV=dt
where g is acceleration due to gravity and f is a friction factor.
Summing these forces and dividing throughout by gA gives:
fLV
2
=ð2gDÞþL=g dV=dt þ H
i
¼ 0 ð2:1Þ
Neglecting pipeline resistance produces the simple relationship:
H
i
¼L=g dV=dt ð2:2Þ
This simple expression can be used to obtain a very rapid assessment of
transient pressure rise/fall for a given rate of flow change. Supposing a
valve closure at the downstream end of the pipeline occurs. As soon
as the valve has become completely closed then V ¼ 0 and
dV=dt ¼ 0; that is, no further change in velocity occurs. The inertial
head H
i
becomes zero and the transient event is over. The limitation
of this approach arises when the magnitude of dV=dt is large and/or
the pipeline length L is considerable. Then values of H
i
can become
unrealistically large and it is at this stage that it is necessary to
employ the elastic approach in order to obtain more realistic answers.
The incompressible flow equation (2.1) has another important function
22
M
M
Valve closing
Static head line
Inertial head gradient
Resistance gradient
Velocity = V
Diameter = D
H
i
h
f
L
Cross-section A
Fig. 2.1. Definition sketch for rigid column analysis
Pressure transients in water engineering
in that it can be used to provide preliminary estimates for capacity of
some types of surge protection equipment and some examples of its
use in this regard will be considered later in this book.
2.2 Compressible flow theory
A straightforward derivation of the equations of motion in compressible
flow is presented in this chapter. Basically there are two independant
variables: x, the distance along the axis of a pipeline; and t, the time
which has elapsed from some starting-point. The distance along a pipe-
line may be þve or ve depending upon how the user has decided to
schematise a network but the normal flow direction in a line would
be taken as the þve direction. The time elapsed may also be fairly
arbitrarily assigned. For instance time t ¼ 0 might be taken at or
shortly before a transient event commences.
Dependent variables are fundamentally those of flow rate Q and
pressure p. These vary with both x and t. Assuming a uniform velocity
V over any pipe cross-section A then velocity can replace flow rate
through V ¼ Q=A. The relationships governing these variables are
those of conservation of mass and conservation of force and
momentum. Other variables such as air volume, water level or possibly
pump speed are related to the primary variables V and p through
additional equations.
2.2.1 Conservation of force
Consider a section of pipeline having an arbitrary shape of cross-section
A and of length dx as illustrated in Fig. 2.2. At any instant the forces
acting upon the body of liquid within this element are:
the net pressure force ¼@p=@x dxA
the pipeline resistance force ¼S dx gA
the axial component of liquid weight ¼@z=@x dx gA
and the inertia force ¼A dxð@V=@t þ V @V=@xÞ
where S is the rate of head loss due to pipeline resistance, is liquid
density, g is acceleration due to gravity and z is elevation of the pipe
centreline.
Summating these forces:
@p=@x dxA S dx gA @z=@xgA
A dxð@V=@t þ V @V=@xÞ¼0
23
Derivation of basic equations
and dividing throughout by A dx gives:
1= @p=@x þ gS þ g @z=@x þ @V=@t þ V @V=@x ¼ 0 ð2:3Þ
2.2.2 Conservation of mass
Considering the mass balance within the element over an increment of
time, dt:
the net mass influx to the element (neglecting second-order effects)
¼A @V=@x dx V @A=@x dx VA @=@x dx
the rate of change of mass within the element
¼ @=@tðA dxÞ¼@A=@t dx þ A @=@t dx
24
H
Piezometric line
Horizontal datum
dx
z
S
A
z + ∂z/∂x dx
rAV + ∂(rAV )/∂x d
x
h = p/(rg)
p/(rg) + ∂[p/(rg)]/∂x dx
rAV
Fig. 2.2. Definition sketch for compressible flow analysis
Pressure transients in water engineering
Equating net mass inflow to rate of change of mass within the
element yields:
A @V=@x dx þ V @A=@x dx þ VA @=@x dx þ @A=@t dx
þ A @=@t dx ¼ 0
and dividing throughout by the mass of fluid within the element A dx
gives:
@V=@x þ 1=ð@=@t þ V @=@x Þ
þ 1=Að@A=@t þ V @A=@xÞ¼0 ð2:4Þ
2.2.3 Compressible flow equations in terms of total head H
Introducing pressure head h ¼ p=ðgÞ and total head above datum
H ¼ h þ z then the force balance equation:
@V=@t þ V @V=@x þ 1= @p=@x þ gS þ g @z=@x ¼ 0 ð2:3Þ
becomes:
@V=@t þ V @V=@x þ 1=ðgÞð@H=@x @z=@xÞþgS þ g @z=@x ¼ 0
or finally:
@V=@t þ V @V=@x þ g @H=@x þ gS ¼ 0 ð2:5Þ
In the mass balance equation:
@V=@x þ 1=ð@=@p @p=@t þ V @=@p @p=@xÞ
þ 1=Að@A=@p @p=@t þ V @A=@p @p=@xÞ¼0 ð2:2Þ
Since and A are taken to be solely dependant on pressure p, therefore,
d=dp ¼ @=@p and dA=dp ¼ @A=@p. Also dz=dx ¼ @z=@x since @z=@t
is assumed ¼ 0.
Substituting gðH zÞ for pressure p then:
@V=@x þf1= d=dp þ 1=A dA=dpggf@H=@t þ V @H=@xg
f1= d=dp þ 1=A dA=dpgg dz=dx ¼ 0
Writing,
1=a
2
¼ ð1= d=dp þ 1=A dA=dpÞ
25
Derivation of basic equations
or,
a ¼ 1=
p
fð1= d=dp þ 1=A dA=dpÞg ð2:6Þ
then the mass balance equation finally becomes:
a @V=@x þ g=af@H=@t þ V @H=@xgg=aV dz=dx ¼ 0 ð2:7Þ
26
Pressure transients in water engineering
3
Interpretation of a
A critical element of the equation of conservation of mass (equation
(2.7)) derived in Chapter 2 is the quantity a which is a complicated
function involving both the properties of the fluid and of the conduit.
The value assigned to this parameter will have a crucial role to play
in the prediction of pressure extremes. This chapter attempts to
describe some of the factors which should be considered when choosing
a value and also some of the uncertainties present in estimation.
In Chapter 2 the quantity a was established as:
a ¼ 1=
p
fð1= d=dp þ 1=A dA=dpÞg ð2:6Þ
The value of a is dependent upon the properties of the fluid and d=dp
and upon the cross-sectional area of the conduit and its deformation
characteristics A and dA=dp.
3.1 Fluid properties
Considering fluid characteristics. For water in the liquid state, the bulk
modulus K is defined by:
K ¼ dp=ðd=Þ or 1=K ¼ 1= d=dp ð3:1Þ
For water, the value of K varies only slowly with temperature with a
decrease of the order of 2% between 08C and 508C. A value of
2.137 GN/m
2
at 218C is given by Knapp et al. (1970) with Thorley
and Enever (1979) providing a slightly higher value of 2.193 GN/m
2
at 208C. Seawater has a value of 2.4 GN/m
2
at 258C. For a computer
simulation conducted assuming an almost uniform temperature, K
can be considered constant and independent of flow conditions. If it
27
is assumed that the body of water is infinitely large then:
a ¼ 1=
p
fð1= d=dp þ 1=1dA=dpÞg or a ¼
p
fK=g
ð3:2Þ
Equation (3.2) is the speed of propagation of sound or of a pressure
wave through an unconstrained body of water. Equation (2.6) repre-
sents the speed of the pressure wave or sound wave through a fluid
body which is contained within a conduit.
3.2 Influence of the conduit wall
Introduction of the term 1=A @A=@p represents the influence of the
conduit containing the water. The simplest representation of the
pipeline’s effect on a is that for a relatively thin-walled circular elastic
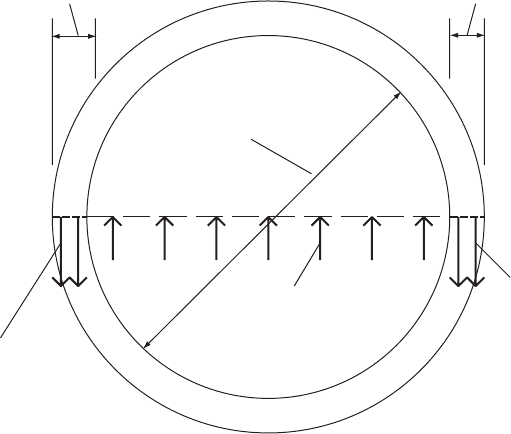
pipe which is unconstrained in the axial direction. With reference to
Fig. 3.1, if a change of internal pressure dp takes place, then for
equilibrium:
dpD ¼ d2s or d ¼ D dp=ð2sÞ
28
Change of internal
pressure = dp
Wall thickness = s Wall thickness =
s
Diameter = D
Change of hoop stress = ds
ds
Fig. 3.1. Forces at a pipe cross-section
Pressure transients in water engineering
also
Youngs modulus E ¼ d=ðdc=cÞ¼dpD=ð2s dD=DÞ
¼ D
2
=ð2sÞdp=dD
assuming that the pipe is entirely free to contract in length. Re-
arranging,
dD=dp ¼ D
2
=ð2sEÞ
Cross-sectional area A ¼ =4D
2
and A þ dA ¼ =4ðD þ dDÞ
2
,or
neglecting second-order effects:
dA ¼ =2D dD or dA=dD ¼ =2D
and
1=A dA=dD ¼ 2=D
then,
1=A dA=dp ¼ 1=A dA=dD dD=dp ¼ 2=D D
2
=ð2sEÞ
¼ D=ðsEÞð3:3Þ
3.3 Simple expression for a
Substitution of the relationships of equations (3.1) and (3.3) in the
expression for a then:
a ¼ 1=
p
f½1=K þ D=ðsEÞg
To accommodate these conditions in which the pipe is not entirely
free to contract longitudinally due to restraint, a factor c
1
is introduced
so that finally:
a ¼ 1=
p
fð1=K þ Dc
1
=ðsEÞÞg or
a ¼
p
ðK=Þ=
p
ð1 þ DK=ðsEÞc
1
Þð3:4Þ
The speed of propagation of the pressure wave through an uncon-
fined body of liquid is modified by the effect of the containing pipe
walls. In all cases a reduction in the unconfined value for
a ¼
p
ðK=Þ is experienced. Liquid and pipe are considered to act as
a composite medium giving a single value of a for this two-component
arrangement. This is justified by the continuous coupling action
between liquid and conduit throughout the system. Calculations can
be carried out for a pipeline system modelled with the liquid and
29
Interpretation of a
pipewall represented as separate components using individual propaga-
tion rates for liquid and conduit but these are usually confined to the
analysis of vibrations. Some examples of these types of analyses are
described in papers by Ellis (1980), Kot et al. (1980), Wilkinson
(1980) and Heinsbroek and Tijsseling (1994). These methods are not
used in day-to-day pressure transient investigations.
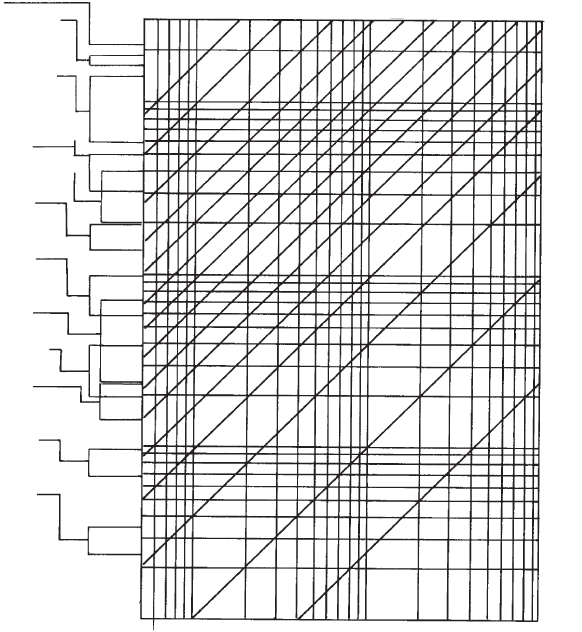
For the simple case considered, wave speed a is seen from equation
(3.4) to be a constant for each pipeline of a system, independent of
flow conditions. Individual values of a used in analyses can vary consid-
erably from case to case depending upon the geometrical characteristics
of the pipe and its material. Figure 3.2 displays the possible range in
wave speed as a function of elastic modulus E and the ratio Dc
1
=s for
30
500
400
300
200
100
50
321
8
9
10
11
a = 1350 1300
Steel
Hard cast iron
Soft cast iron
Concrete
Asbestos cement
Polyester
(glass fabric)
Polyester
(glass fibre)
Perspex
PVC (hard)
PVC
(blow resisting)
PE (hard)
PE (soft)
log
10
(E)
1200 1100 1000 900 800 700 600
log
10
(Dc
1
/s)
a = ÷ (K/r)/÷[1 + DKc
1
/(sE )]
Fig. 3.2. Acoustic wave speed a as a function of E and Dc
1
/s
Pressure transients in water engineering
a circular pipe section. A wave speed value for wood stave pipe was
given by Fedosoff and Szpak (1979) as 762.0 m/s. The influence of
constraints has been considered by various authors such as Streeter
and Wylie (1967), Thorley and Enever (1979) and Jaeger (1977).
Expressions for the constraint factor c
1
for different circumstances,
including thick-walled conduits defined by D=s < 25, and tunnels
have been included in Table 3.1.
31
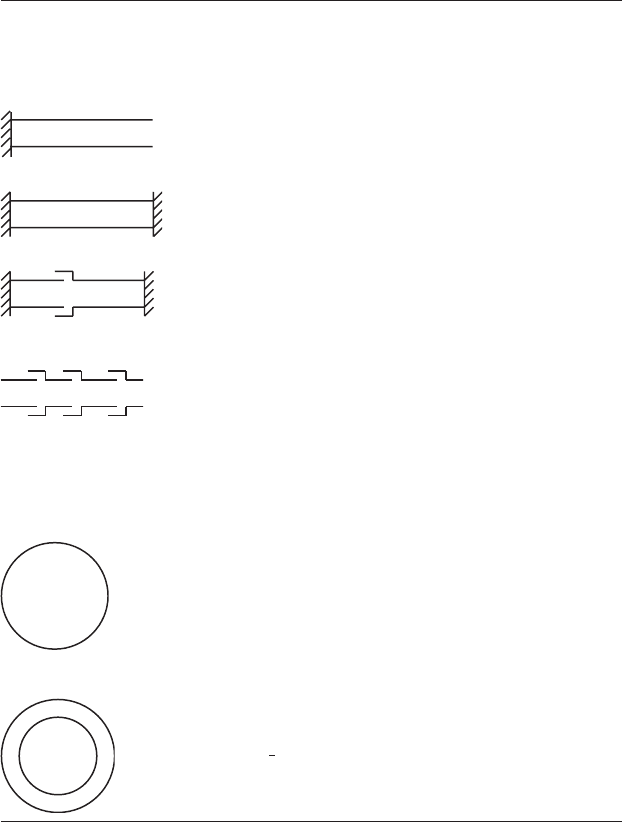
Table 3.1. Constraint factor c
1
for various conditions
Pipelines: a ¼
p
ðK=Þ=
p
ð1 þ D=s K=E c
1
Þ
Thin-walled: D=s 25 Thick-walled: D=s < 25
Anchored at one end and
other end free
c
1
¼ 5=4 c
1
¼ D=ðD þ sÞð5=4 Þþ2s=Dð1 þ Þ
Anchored at both ends
c
1
¼ 1
2
c
1
¼ D=ðD þ sÞð1
2
Þþ2s=Dð1 þ Þ
Expansion joints
c
1
¼ 1 =2
Expansion joints
throughout
c
1
¼ 1 c
1
¼ D=ðD þ sÞþ2s=Dð1 þ Þ
c
1
is usually in the range 0:85 c
1
1:25
Tunnels: a ¼
p
ðK=Þ=
p
ð1 þ K=Ec
1
Þ
Unlined: E ¼ E
r
c
1
¼ 2ð1 þ Þ
Lined: E ¼ lining modulus, E
r
¼ rock modulus
c
1
¼ 1=ð1 þ
1
2
D=s E
r
=EÞ
Interpretation of a