Дыхта В.А. Динамические системы в экономике. Введение в анализ одномерных моделей
Подождите немного. Документ загружается.

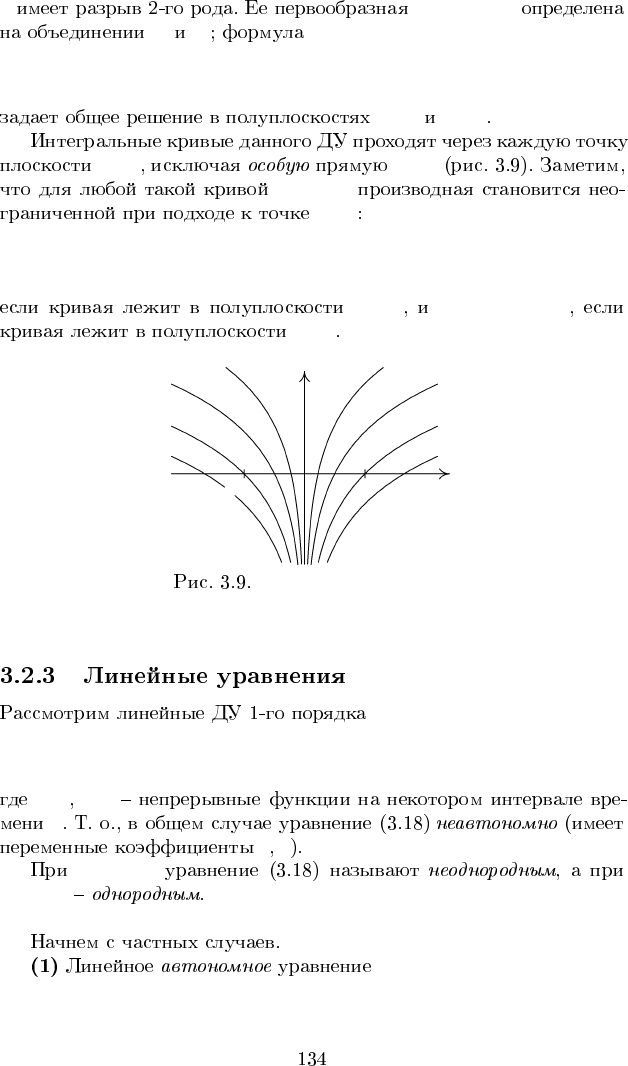
y
0
= y
2
−t
I Ot
f(t) I
f(t) I
F (t)
F
0
(t) = f(t) ∀t ∈ I.
F (t) f(t) I
f(t) F (t)+C
C
R
f(t)dt f(t)
I
Z
f(t)dt = F (t) + C,
F f I C
t f(t)
d
dt
³
Z
f(t)dt
´
= f(t),
d
³
Z
f(t)dt
´
= f(t)dt,
Z
df(t) = f(t) + C
f(t) [a, b] ⊂ I
R
b
a
f(t)dt
Z
b
a
f(t)dt = F (b) − F (a);
F (t) f [a, b] a
b [a, b]
Z
t
a
f(s)ds (t ∈ I)
f(t)
d
dt
Z
t
a
f(s)ds = f(t) t ∈ I
Z
f(t)dt =
Z
t
a
f(s)ds + C,
t ∈ I C
I f(t)
f(t) = f(a) +
Z
t
a
f
0
(s)ds
a, b, c I
Z
b
a
f(t)dt =
Z
c
a
f(t)dt +
Z
b
c
f(t)dt.
f(t), g(t)
I α, β
Z
b
a
£
αf(t) + βg(t)
¤
dt = α
Z
t
a
f(t)dt + β
Z
b
a
g(t)dt (a, b ∈ I).
Z
cos tdt = sin t + C (t ∈ R);
Z
sin tdt = −cos t + C; (t ∈ R);
Z
e
t
dt = e
t
+ C (t ∈ R);
Z
a
t
dt = a
t
/ ln a + C (t ∈ R);
Z
t
n
dt =
t
n+1
n + 1
+ C n ∈ N t ∈ R;
Z
t
α
dt =
t
α+1
α + 1
+ C α 6= −1 t > 0;
Z
dt
t
= ln |t| + C t 6= 0.
y
0
= f(t)
dy
dt
= f(t), (3.15)
f(t) I = (a, b)
y(t) =
Z
f(t)dt + C, t ∈ I, (3.16)
C
f
Z
t
t
0
f(s)ds (t
0
∈ I ),
y(t) =
Z
t
t
0
f(s)ds + y(t
0
), t ∈ I (3.17)
C = y(t
0
)
y(t
0
) =
y
0
f
y
0
= sin 2t
y(t) = −
1
2
cos 2t + C,
t ∈ R
y(0) = 1 t
0
= 0, y
0
= 1),
t = 0, y(0) = 1
1 = −
1
2
cos 0 + C, 1 = −
1
2
+ C.
C = 3/2
y = ϕ(t) = −
1
2
cos 2t +
3
2
.
y
0
= 1/t f = 1/t
I
1
= (−∞, 0) I
2
= (0, +∞) t =
0 F (t) = ln | t|
I
1
I
2
y = ϕ(t) = ln |t| + C, t 6= 0
t < 0 t > 0
(t, y) t = 0
y = ϕ(t)
t = 0
ϕ
0
(0−) = lim
t→0−
ϕ
0
(t) = −∞,
t < 0 ϕ
0
(0+) = +∞
t > 0
t
y
1
0
−1
y
0
= a(t)y + b(t), (3.18)
a(t) b(t)
I
a b
b(t) 6= 0
b(t) ≡ 0
y
0
= ay + b (a 6= 0) (3.19)
b = 0 b 6= 0
y
∗
= −b/a
z = y − y
∗
( y = z + y
∗
).
t z
z
0
= ay + b = a(z + y
∗
) + b = az,
ay
∗
+ b = 0 z
0
= az
z(t) = Ce
at
.
y(t) = Ce
at
+ y
∗
. (3.20)
y(t
0
) = y
0
C
y(t) = (y
0
− y
∗
)e
a(t−t
0
)
+ y
∗
. (3.21)
a < 0
(t
0
, y
0
) y
∗
t → +∞ a > 0
t → +∞
y
0
= a(t)y (3.22)
y(t) = Ce
A(t)
, A(t) =
Z
a(t)dt (3.23)
a(t) C
y(t) A
0
(t) = a(t)
y
0
(t) = C
d
dt
h
e
A(t)
i
= Ce
A(t)
a(t) = a(t)y(t).
C
C = 0
y ≡ 0
¯y (t)
I y
1
(t)
C = C
1
6= 0 y
1
(t) 6= 0)
z(t) =
¯y( t)
y
1
(t)
, t ∈ I.
z
0
(t) =
¯y
0
(t)
y
1
(t)
− ¯y(t)
y
0
1
(t)
y
2
1
(t)
³
¯y
0
= a¯y, y
0
1
= ay
1
´
= a(t)
¯y (t)
y
1
(t)
− a(t)
¯y( t)
y
1
(t)
= 0.
z(t) I
¯y( t)
y
1
(t)
= c = const,
¯y (t) = cy
1
(t) = cC
1
e
A(t)
.
¯y( t)
C = cC
1
2
y(t
0
) = y
0
y(t) = y
0
e
A(t)−A(t
0
)
(3.24)
y
0
= 0 y(t) ≡ 0
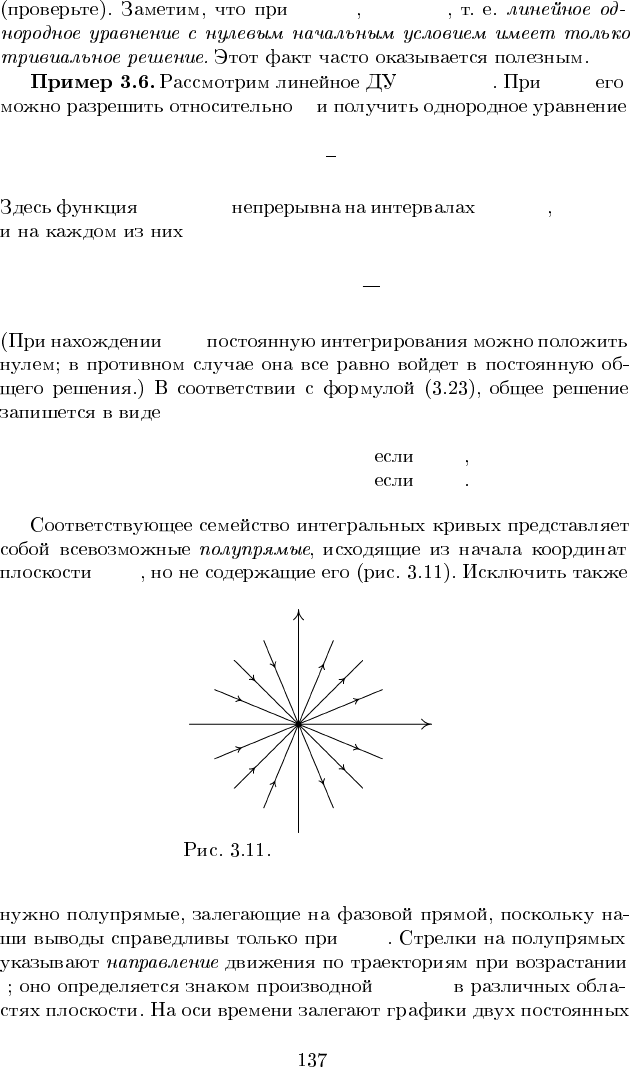
ty
0
−y = 0 t 6= 0
y
0
y
0
=
y
t
.
a(t) = 1/t (−∞, 0) (0, +∞)
A(t) =
Z
a(t)dt =
Z
dt
t
= ln |t|.
A(t)
y(t) = Ce
ln |t|
=
½
−Ct, t < 0
Ct, t > 0
(t, y)
t
y
t 6= 0
t y
0
= y/t
y = 0 (−∞, 0) y = 0 (0, +∞)
r(t)
S
0
= r(t)S, S(t
0
) = S
0
,
S
0
= dS/dt.
R(t) =
Z
t
t
0
r(s)ds,
S(t) = S
0
exp
¡
R(t)
¢
.
S
0
S
0
= S(t) exp
¡
− R(t)
¢
.
S
0
t
y(t) = C(t)e
A(t)
, A(t) =
Z
a(t)dt. 3.25
C
C(t)
C
0
(t)e
A(t)
+ C(t)e
A(t)
a(t) = a(t)C(t)e
A(t)
+ b(t)
C
0
(t)
C
0
(t) = e
−A(t)
b(t).
C(t)
C(t) =
Z
e
−A(t)
b(t)dt + C
1
,
C(t)
y(t) = e
A(t)
h
Z
e
−A(t)
b(t)dt + C
1
i
. 2 (3.26)
y
0
= −y cos t + e
− sin t
a(t) = −cos t b(t) = exp(−sin t)
A(t) = −sin t
y
0
= −y cos t,
y(t) = C exp(−sin t)
y(t) = C(t) exp(−sin t).
C
0
(t)e
− sin t
− C(t) cos t e
− sin t
= −C(t)e
− sin t
cos t + e
− sin t
.
C
0
(t) = 1 ⇒ C(t) = t + C
1
.
y(t) = (t + C
1
)e
− sin t
y
0
= 2ty + 1, y (0) = −
1
2
.