Дрючин В.Г., Ткачев Р.Ю. Теоретические основы электротехники. Электрические цепи
Подождите немного. Документ загружается.

312
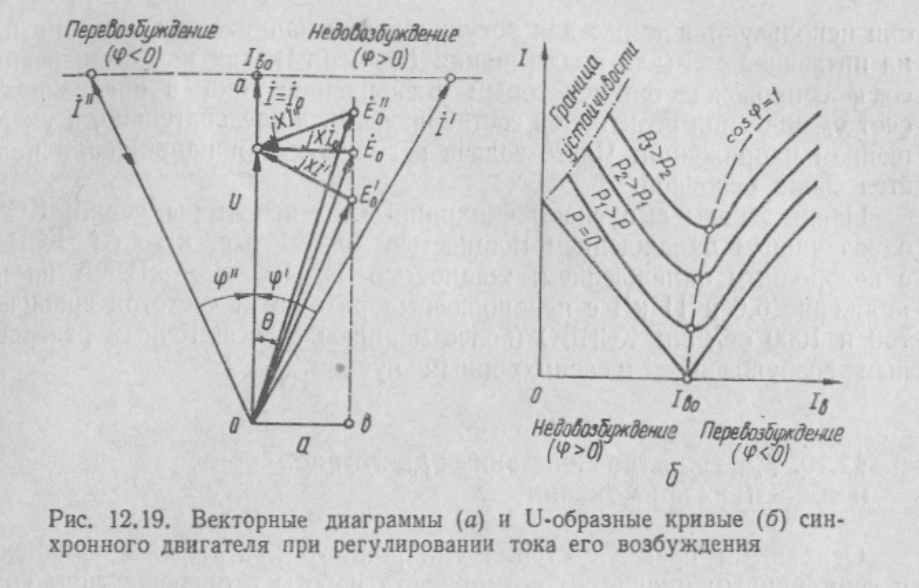
ток статора 1=I0 имеет наименьшее значение и совпадает по фазе с напряжением
U, т. е. φ=0. При Iв<Iв0 (недовозбуждение) э.д.с. Е0’< Е0, а ток I’>I0 и отстает по
фазе от напряжения U на угол φ’>0: двигатель работает в активно-индуктивном
режиме. При Iв>Iв0 (перевозбуждение) э.д.с. Е0”> Е0, ток 1”> I0,
и опережает по фазе
напряжение U на угол φ”<0: двигатель работает уже в активно-емкостном режиме.
На векторных диаграммах синхронного двигателя в сравнения с такими же
диаграммами синхронного генератора (см. рис. 12.14, а) зоны индуктивного и
емкостного сдвигов фаз поменялись местами [9].
На рис. 12.19,6 показано для ряда нагрузочных режимов семейство U-образных
кривых синхронного двигателя 1 (Iв).
Возможность весьма простого регулирования угла сдвига фаз φ между током и
напряжением (как по значению, так и но знаку), а следовательно, и коэффициента
мощности соsφ изменением тока возбуждения является очень важным достоин
ством и
принципиальным преимуществом синхронных двигателей перед асинхронными.
Синхронные двигатели, работая в режиме перевозбуждения, могут не только нести
активную нагрузку, но и компенсировать в нужной мере индуктивный сдвиг фаз
313
(увеличивать соsφ) сети.
12.19. Синхронный компенсатор
С и н х р о н н ы й к о м п е н с а т о р—это синхронный двигатель облегченной
конструкции, предназначенный для работы без механической нагрузки в режиме
большого перевозбуждения и используемый только для улучшения соsφ. Синхронные
компенсаторы включаются в сеть параллельно и являются (подобно конденсаторам)
генераторами реактивной мощности. Поскольку они работают без нагрузки,
потребляемая имя из сети небольшая активная мощ
ность идет на покрытие потерь ХХ
с учетом переменных потерь на возбуждение, активная составляющая их тока
статора I остается почти неизменной, т. е. I= I*соsφ=const. Эффект компенсации
индуктивного сдвига фаз, осуществляемый синхронным компенсатором, поня
тен из рис.
З.30,в. При сильном перевозбуждении ток компенсатора I
с.к. опережает напряжение
U почти на 90.
Мощные синхронные компенсаторы устанавливаются обычно на конечных
крупных ПС длинных ЛЭП. В этом случае они разгружают линию, генераторы и даже
трансформаторы (при установке со стороны НН) от реактивной составляющей тока в
нагрузке и соответственно уменьшают потери энергии в их активном сопротивления.
Попутно
они используются также для регулирования напряжения в линии или на питающей ПС
(для поддержания U=const), так как компенсация cosφ сопровождается некоторым
уменьшением тока в нагрузке (за счет уменьшения реактивной составляющей), а
следовательно, и уменьшением напряжения. Часто задача регулирования напряжения
является даже основной.
Наши заводы выпускают синхронные компенсаторы серий: КС---с воздушным
охлаждением мощностью 10—З0 тыс, кВ*А; КСВ---с водородным охлаждением,
мощностью 30—100 тыс. кВ *. А на напряжение 6,6 и 11 кВ
с явнополюсным ротором и
частотой вращения 750 и 1000 об/мин; КСВБО (более мощные) с бесщеточным
реверсивным возбуждением и асинхронным пускам.
12.20. Достоинства синхронных двигателей
и области их применения
Основными преимуществами синхронного двигателя в сравнении с асинхронным
являются: возможность работы с опережающим cosφ(φ<0), что используется для
повышения общего cosφ сети; более высокий к. п. д. (меньшие потери в роторе);
стабильность частот
ы вращения, которая не зависит от изменения нагрузки; меньшая
зависимость вращающего момента от напряжения сети. К его основным недостаткам
относятся: сложность конструкции и пуска; относительно высокая стоимость;
необходимость в постоянном токе; невозможность регулирования частоты вращения
(при f1=const); опасность выпадения из синхронизма при перегрузке и значительных
колебаниях нагрузки; более сложное техническое обслуживание.
Наша промышленность выпускает синхронные двигатели мощностью от 55
до 20
тыс, кВт в открытом, защищенном и закрытом исполнениях с опережающим cosφ=
0,9
314
на напряжения 220, 380, 500, 660 В, 3,6 и 10 кВ с частотой вращения 100—3000
об/мин, в том числе единых серий и их модификаций: ЕСД---общепромышленного
применения (Е---единой серии, С--- синхронный, Д---двигатель) мощностью 55—
100 кВт
с самовозбуждением; СД и СДЗ---общепромышленного применения (З---закрытые);
СДВ---для привода вентиляторов; СДКМ и СДК, СДКП и СДКП2 (К---
компрессорные, П
--продуваемые); СДН, СДН-2 и СДН-3---нормального (Н), т. е. обще- промышленного
исполнения (см. рис. 12. 16,в), и закрытые (З); ВДС, ВСДН---вертикальные (В) для
привода вертикальных насосов; СТД---быстроходные для привода насосов,
турбокомпрессоров, нагнетателей, воздуходувок.
12.21. Синхронные генераторы малой мощности
Синхронные генераторы переменного тока мощностью 60—1000 Вт на
напряжения 6, 12 и 24 В используются на тракторах и автомобилях вместо
генераторов постоянного тока. Генераторы приводятся в движение от теплового
двигателя машины через клиноременную передачу.
315
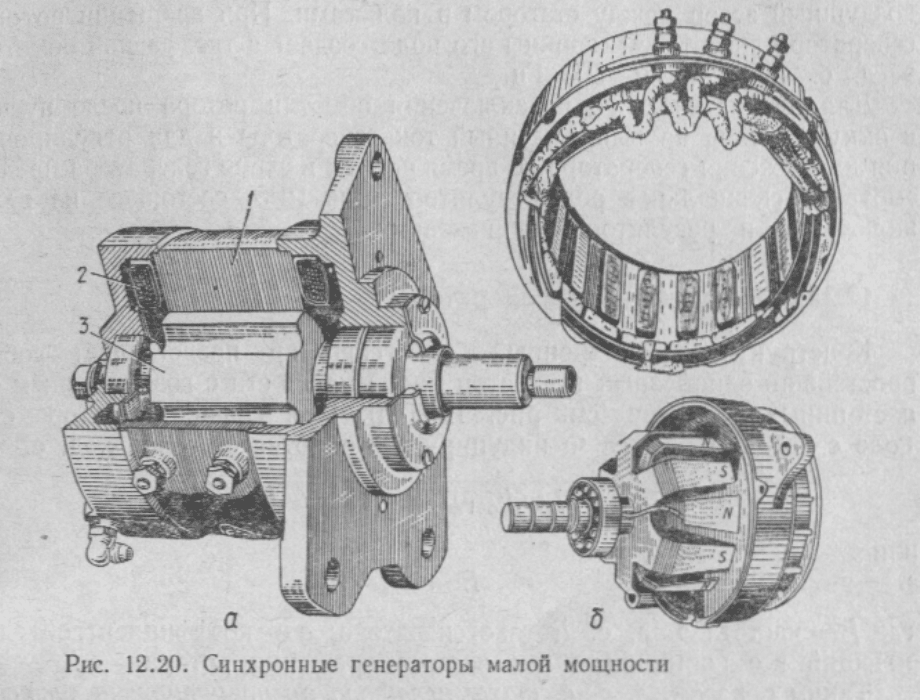
Бесконтактные однофазные синхронные генераторы серии Г (рис. 12.20,а) с
возбуждением от постоянных магнитов устанавливаются на тракторах для питания
ламп накаливания. Отличаются простотой и надежностью конструкции. В пазах
сердечника статора 1 располагается катушечная обмотка статора 2, состоящая из
нескольких параллельных ветвей, общая точка которых соединена на корпус. Ротор
состоит из шестиполюсного постоянного магнита 3, отлитого из
железоникельалюминиевого сплава с высокими магнитными свойствами, магнитное
поле чередующихся полюсов которого замыкается через сердечник статора. При
вращении ротора из-за пазов в сердечнике статора его поле изменяется по значению и
направлению и в обмотке статора наводятся переменные э. д. с.
Трехфазные синхронные генераторы (рис. 12.20,6) с электромагнитным
возбуждением типов Г все больше применяются в автомобилях. Сердечник статора
(показан на рис. 12.20,б вверху) имеет 18 пазов, в которых располагаются 18 катушек
трехфазной обмотки статора. Концы обмотки внутри статора соединяются звездой,
а три начала закрепляются на щитке, изолированном от корпуса. Каждая фаза
обмотки состоит из шести катушек, включенных параллельно или последовательно. К
выводам генератора подключается мостовая цепь трехфазного полупроводникового
выпрямителя, отрицательный полюс которого соединяется с корпусом. —
Ротор генератора состоит из двух шестиполюсных когтеобразных стальных
наконечников. Обмотка возбуждения располагается на стальной втулке (закрепленной
на валу) вплотную под полюсными наконечниками. Магнитное поле ротора замыкается
через стальную втулку, полюсные наконечники и сердечник статора, преодолевая

316
воздушный зазор между статором и полюсами. При вращении ротора генератора
двигателем машины его поле создает в трехфазной обмотке э.д.с. частотой
50—500 Гц.
Для автоматического переключения обмотки ротора после пуска с аккуму
лятора
на выпрямленный ток генератора и для регулирования напряжения генератора во время
работы в схеме генератора предусмотрено специальное реле-регулятор типа РР5,
состоящее из реле включения и регулятора напряжения.
12.22. Синхронные тахогенераторы
Конструктивно синхронный тахогенератор представляет собой простейший
однофазный генератор малой мощности с возбуждением от постоянных магнитов
(см. рис. 12.20,а). При вращении ротора его поле с потоком полюса Ф индуцирует в
обмотке статора э. д. с.
или
Е = сп,
где f---частота э. д. с. Е тахогенератора; с---коэффициент, объединяющий все
постоянные; п---частота вращения ротора.
Таким образом, э. д. с. тахогенератора пропорциональна частоте вращения п.
Главным недостатком тахогенератора, препятствующим его применению в
автоматике, является нелинейность выходной характеристики Uвых (n
), обусловленная
тем, что с изменением частоты вращения ротора одновременно изменяется и частота
выходного напряжения. Для повышения точности тахогенератора сопротивление его
нагрузки ограничивается.
Синхронные тахогенераторы получили широкое применение лишь в качестве
тахометрического преобразователя (датчика) для непосредственного измерения
частоты вращения машин и механизмов. В этом случае к полюсам тахогенератора
подключается вольтметр с отградуированной шкалой [19].
12.23. Реактивные синхронные двигатели
малой мощности
Для работы в специальном и общепромышленном электроприводах, где
необходима постоянная частота вращения, разработаны
и внедряются конструктивно
простые и надежные в эксплуатации трехфазные бесконтактные реактивные
синхронные двигатели серий РС (с короткозамкнутым ротором), СРО (обдуваемые) и
СО мощностью до 13 кВт на 1000, 1500 об/мин и напряжение 220/380 В частотой
50 Гц, с к. п.д. более 80 % [19].
Реактивный синхронный двигатель (рис. 12.21,а) имеет трехфазный статор и
явнополюсный стальной ротор (без обмотки возбуждения и постоянных магнитов).
Принцип его действия основан на свойстве вращающегося магнитного поля статора
расположить явнополюсный ротор из магнитомягкого материала в положении, при
котором маг-
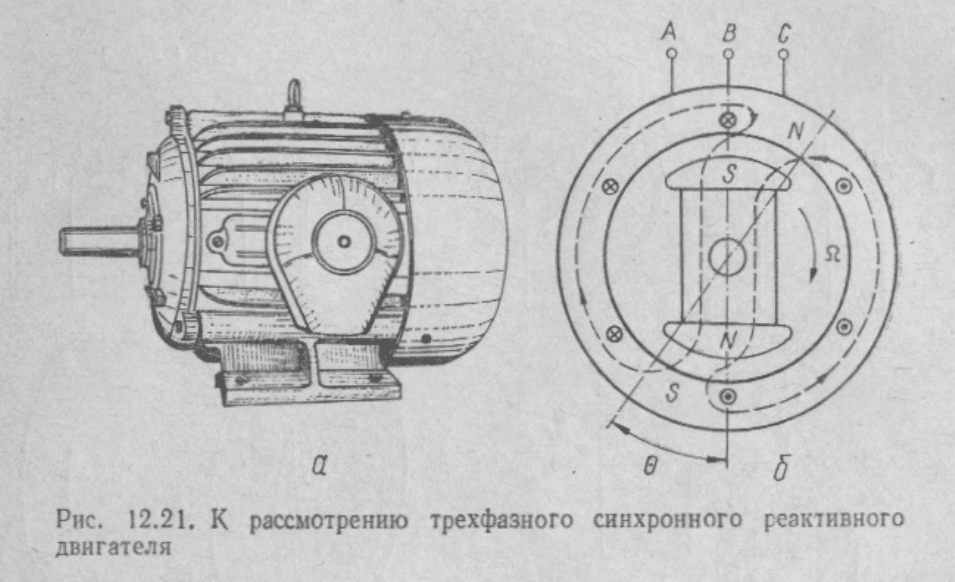
317
нитная цепь будет иметь наименьшее магнитное сопротивление, т. е. ток, чтобы оси
полюсов ротора и статора совпадали (θ=0).
Если к ротору двигателя приложить некоторый тормозной момент, то он
отстанет от поля статора на угол θ, соответствующий значению нагрузки
(рис. 12.21,б), но будет продолжать синхронное вращение. С
возрастанием тормозного
момента на валу магнитное поле продолжает деформироваться, увлекая за собой
ротор. Угол θ, как и вращающий момент двигателя Ммах, будет увеличиваться.
Максимального значения момент двигателя достигает при θ=45.С дальнейшим
увеличением θ деформация магнитного поля ослабляется (часть линий замыкаются
кратчайшим путем, минуя полюсы), момент двигателя уменьшается и при θ=90
становится равным нулю. Следовательно, устойчивая работа двигателя возможна
лишь при нагрузках, соответствующих углу θ=0—45.
Реактивными такие синхронные двигатели называются потому, что
возбуждаются они не со стороны ротора, как обычно, а со стороны статора благодаря
реакции якоря. для возможности асинхронного пуска в полюсных наконечниках ротора
помещаются стержни пусковой короткозамкнутой обмотки. К недостаткам этих
двигателей относятся: относительно большие размеры и масса, меньшие чем у
обычных двигателей к. п. д. и cosφ, малая перегрузочная способность.
12.24. Синхронные микродвигатели
318
Синхронные микродвигатель, разных типов мощностью от долей до нескольких
сот ватт, благодаря неизменной частоте вращения (при f=const), широко
используются в звуковом кино, звукозаписи, электрических часах, реле времени,
лентопротяжных механизмах самопишущих приборов и осциллографов, в качестве
исполнительных микродвигателей в различных автоматических устройствах
синхронной связи, автоматического управления и др. В отличие от
обычных синхронных двигателей они конструктивно просты, надежны в работе и не
нуждаются в источнике постоянного тока, но имеют небольшой к. п. д.
Подразделяются на микродвигатели с постоянными магнитами в роторе, на
реактивные, гистерезисные и шаговые (импульсные) [19].
Синхронные микродвигатели с постоянными магнитами. Из множества
различных типов синхронных микродвигателей с постоянными магнитами в последнее
время широко применяются двигатели самозапускающиеся, с асинхронным и
гистерезисным пуском.
Самозапускающиеся синхронные микродвигатели с постоянными магнитами---
319
это тихоходные многополюсные двигатели мощностью не превышающей долей
ватта, обычно работающие от однофазной сети промышленной частоты 50 Гц.
Статор их имеет кольцеобразную обмотку возбуждения и сердечник из пакета
стальных листов. В роторе располагаются постоянные магниты. К. п. д.
микродвигателей не превышает 3—5 %. Микродвигатели выпускаются массовой серии
ДСМ.
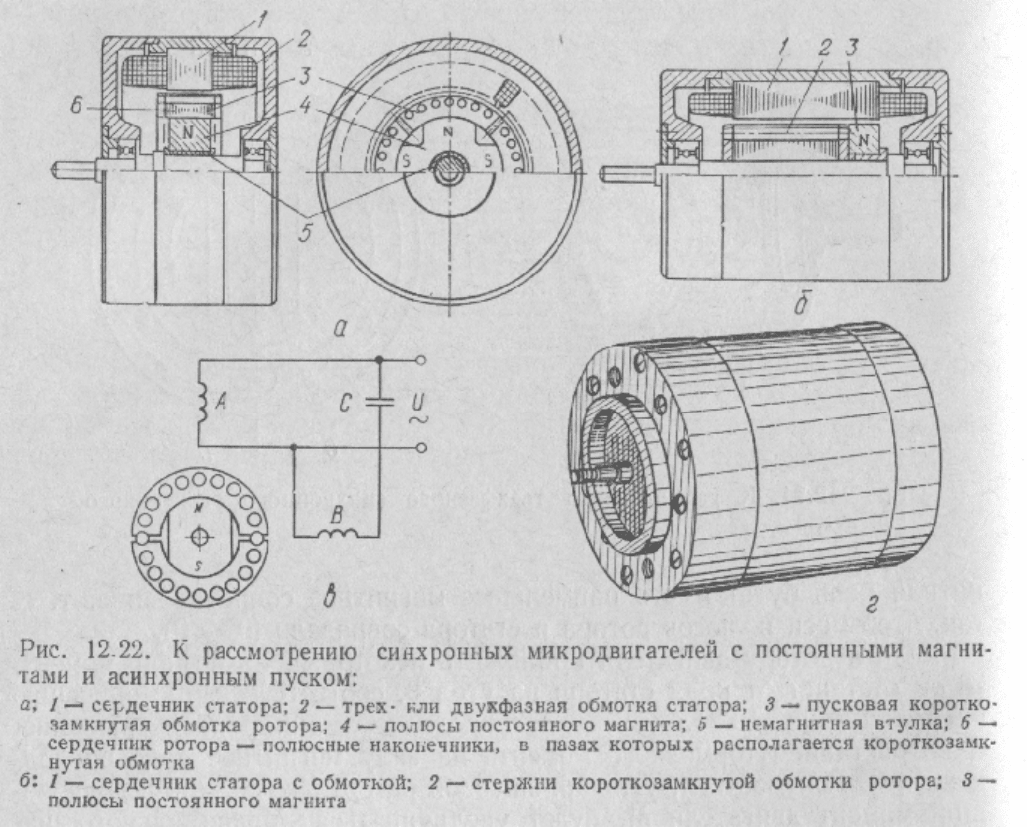
Наибольшее распространение получили компактные трех- или двухфазные
синхронные микродвигатели с асинхронным пуском ---с радиальным (рис. 12.22,а) и
аксиальным (рис. 12.22,б) расположениями постоянного магнита и пусковой
короткозамкнутой обмоткой в роторе. Статор двигателя---
обычный. Микродвигатели
имеют относительно высокие к. п. д., cosφ и перегрузочную способность, но малый
пусковой момент.
Пуск микродвигателей осуществляется прямым включением в сеть. Практически
трех-
или двухфазные синхронные микродвигатели с постоянными магнитами в роторе
часто питаются от однофазной сети. В этом случае для создания
вращающегося поля в
320
обмотке статора используется конденсаторное включение по схемам, аналогичным
включению трехфазных асинхронных микродвигателей в однофазную сеть. Чаще всего
применяются схемы с двухфазными обмотками статора и конденсатором, включаемым
последовательно (рис. 12. 22,в) с одной из фаз.
Наша промышленность изготовляет синхронные микродвигателю с постоянными
магнитами в роторе типов: ДС (рис. 12.22,г), СДПМ (СДПМ-1—СДПМ-
4 с аксиальным,
а СДПМ-5--СДПМ-7 --- с радиальным расположением постоянных магнитов).
Реактивные синхронные микродвигатели. Устройство и принцип действия
реактивного синхронного двигателя рассмотрены в п. 12.23.От короткозамкнутых
асинхронных микродвигателей синхронные микродвигатели отличаются лишь
конструкцией ротора. Статор таких микродвигателей выполняется с распределенной
(или сосредоточенной) трех-, двух- или однофазной обмоткой. Микродвигателя имеют
асин-
320
Введение
Технологические агрегаты состоят из большого числа машин и аппаратов,
выполняющие разные технические и технологические функции. Для создания
таких агрегатов и правильной их эксплуатации необходимо знать назначение и
работу отдельных элементов, входящих в машинное устройство.
Большое число элементов, составляющих современное машинное
устройство, можно разбить на четыре части:
1. Рабочая машина, обеспечивающая при помощи рабочего органа
осуществления технологической операции;
2. Двигатель, обеспечивающий передачу энергии рабочему органу
машины для совершения технологической операции;
3. Передаточный механизм (шестерни, валы, муфты и т. д.),
обеспечивающий связь вала двигателя с рабочим органом машины;
4. Система управления машинным устройством с применением
различного рода автоматических регуляторов, обеспечивающая оптимальное
протекания технологической операции.
Назначение последних трёх частей машинного устройства – привести в
движение рабочую машину. Поэтому совокупность этих трёх частей машинного
устройства называют приводом.
В настоящее время в промышленности для привода рабочих машин в
основном применяют электрический двигатель, поэтому основным типом привода
является электропривод.
Из чего следует, что под электроприводом подразумевается
электромеханическая система, предназначенная для приведения в движение
исполнительных органов производственной (рабочей) машины или установки с
помощью электродвигателей и управления этим движением. Электропривод –
часть электрифицированного агрегата (электропривод и производственная
машина), состоит из электродвигателя, механической передачи от двигателя к
рабочей машине и аппаратуры управления. Последняя позволят управлять