Дрючин В.Г., Ткачев Р.Ю. Теоретические основы электротехники. Электрические цепи
Подождите немного. Документ загружается.

плавное регулирование частоты вращения двигателя с сохранением достаточной
жесткости его механических характеристик, например, в механизмах с
высокостабильной частотой вращения.
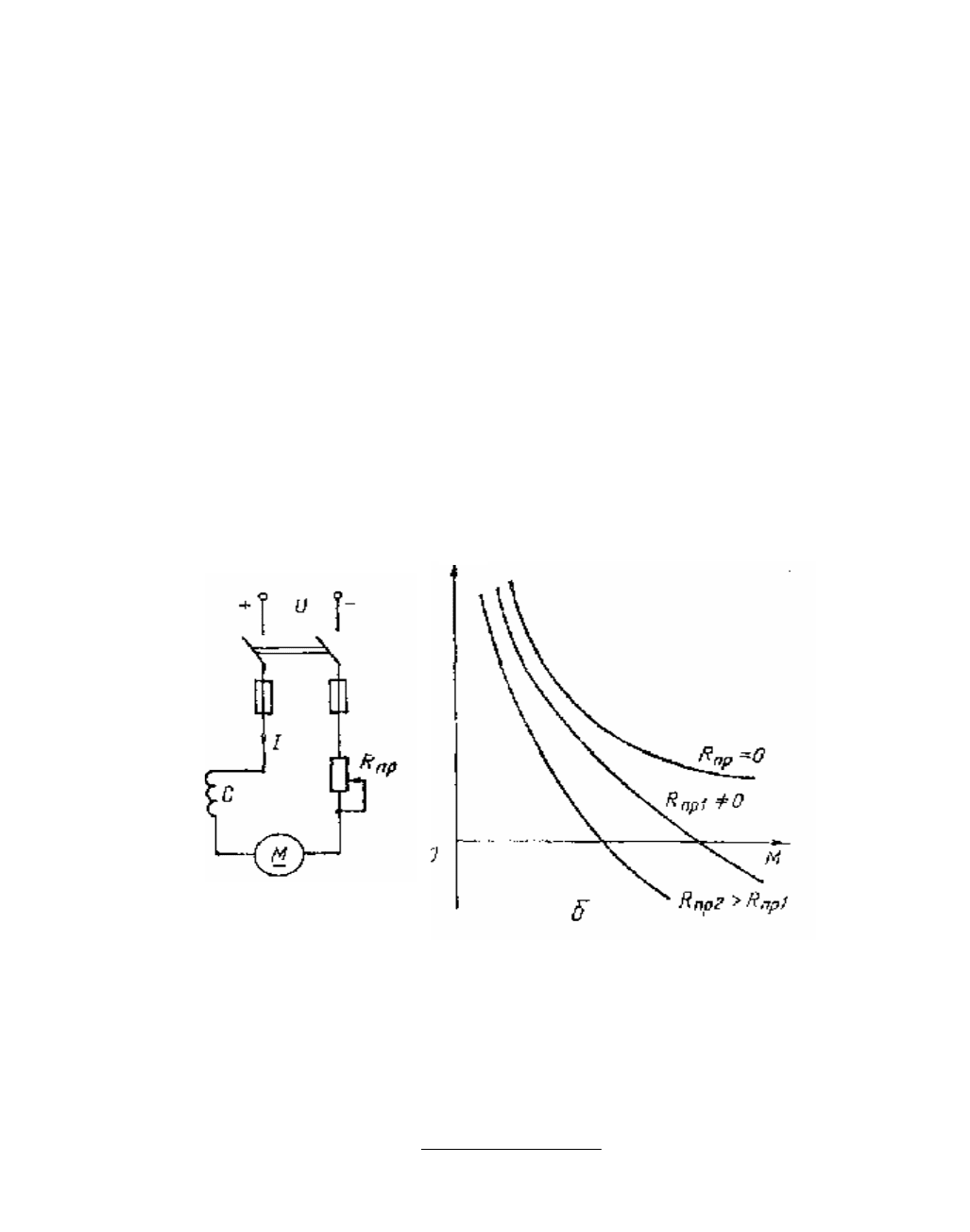
5.17. Двигатель последовательного возбуждения
Обмотка возбуждения двигателя включается последовательно с якорем (рис.
3.23,а) и потому ток в нагрузке является током якоря и током возбуждения (I=I
я
=I
в
).
Это существенно влияет на свойства и характеристики двигателя, так как изменение
момента нагрузки неизбежно сопровождается изменением магнитного потока
статора. Пуск двигателя осуществляется т о л ь к о при наличии тормозного
момента с включенным пусковым реостатом R
пр
который после пуска полностью
выводится.
а
Рисунок 3.23 – Двигатель последовательного возбуждения
Частота вращения двигателя
)I(Фc
I)RR(U
n
cя
⋅
⋅
+
−
=
. (3.32)
где R
с
— сопротивление обмотки возбуждения, обратнопропорциональна
магнитному потоку Ф (I) машины.
n
При XX и малых нагрузках частота вращения двигателя р е з к о возрастает
(в несколько раз превышает номинальную) — двигатель может «идти вразнос».
Поэтому пуск и работа двигателя (кроме двигателей малой мощности с
относительно большим моментом сопротивления XX) вхолостую или при малых
нагрузках (до 20—25 % номинальной), как и соединение его с рабочей машиной
ременной передачей, не допускаются. Вал двигателя с валом рабочей машины
должны соединяться жестко: муфтой или зубчатой передачей. В случае резкого
повышения частоты вращения якоря двигатель необходимо немедленно отключить
от источника.
Естественная механическая характеристика двигателя n(М) при n=const
графически изображена верхней кривой на рис. 3. 23, б. В целом — характеристика
мягкая. До насыщения магнитопровода машины магнитный поток пропорционален
току якоря, т. е. Ф = αI. Следовательно, электромагнитный момент двигателя М=
=
2
I
k
I
Ф
k
⋅
⋅
=
⋅
⋅
α
. Выразив отсюда значение I через М и подставив его в уравнение
(3.32), получим
,B
F
A
c
RR
k
M
c
U
Фc
I)RR(U
n
сяся
−=
⋅
+
−
⋅
⋅⋅
=
⋅
⋅
+
−
=
α
α
α
(3.33)
где А и В — постоянные величины.
Таким образом, частота вращения двигателя с увеличением элек-
тромагнитного момента уменьшается по закону, близкому к гиперболическому.
Замедление спада естественной механической характеристики в нижней части, где
она почти параллельна оси М, обусловлено магнитным насыщением
магнитопровода и падением напряжения на якоре R
я
I
я
.
В соответствии с уравнением (3.25) частота вращения якоря двигателя
последовательного возбуждения
Ф
c
I)RRR(U
n
прся
⋅
⋅
+
+
−
= . (3.34)
Таким образом, двигатель позволяет осуществлять регулирование
частоты вращения изменением напряжения, потока статора и сопротивления
резистора в цепи якоря.
Регулирование частоты вращения изменением потока статора Ф.
производится с помощью реостата R
рег
, шунтирующего обмотку возбуждения
(включается при необходимости). Если увеличивать сопротивление R
рег
, то ток в
обмотке возбуждения увеличивается, а частота вращения уменьшается. Иногда
обмотка возбуждения имеет ответвления (или состоит из нескольких частей).
Отключение части ее витков уменьшает поток и приводит к возрастанию частоты
вращения двигателя.
Регулирование частоты вращения с помощью добавочного резистора в цепи
якоря, например ступенчатого пускорегулирующего реостата R
пр
, хотя и
применяется, но неэкономично, так как связано с большими потерями энергии.
Семейство искусственных механических характеристик двигателя показано на рис.
3.23,б.
Регулирование частоты вращения изменением напряжения между полюсами
двигателя в установках с двумя (или больше) однотипными двигателями, как,
например, в вагоне трамвая при постоянном напряжении сети, достигается
изменением электрической схемы соединения двигателей с использованием
пускорегулирующего реостата R
пр
. На малых скоростях двигатели включаются
последовательно, а на больших — параллельно. При ручном управлении
установкой необходимые переключения схемы выполняются специальным аппара-
том — контроллером.
Тормозные режимы. Для двигателя последовательного возбуждения
возможно торможение противовключением и динамическое торможение.
Торможение противовключением производится так, как и в двигателе
параллельного возбуждения (см. п. 3.15). Динамическое торможение двигателя,
которое применяется реже, осуществляется так: двигатель отключается от
источника, замыкается на ограничительный резистор сопротивлением R
д
и
оказывается в режиме генератора последовательного возбуждения. Запас
кинетической энергии системы во время торможения преобразуется в
электроэнергию цепи якоря и превращается в теплоту.
Двигатели последовательного возбуждения широко применяются на
электротранспорте (тяговые двигатели) и в подъемных установках (крановые
двигатели), где требуется большой вращающий момент (особенно при пуске).
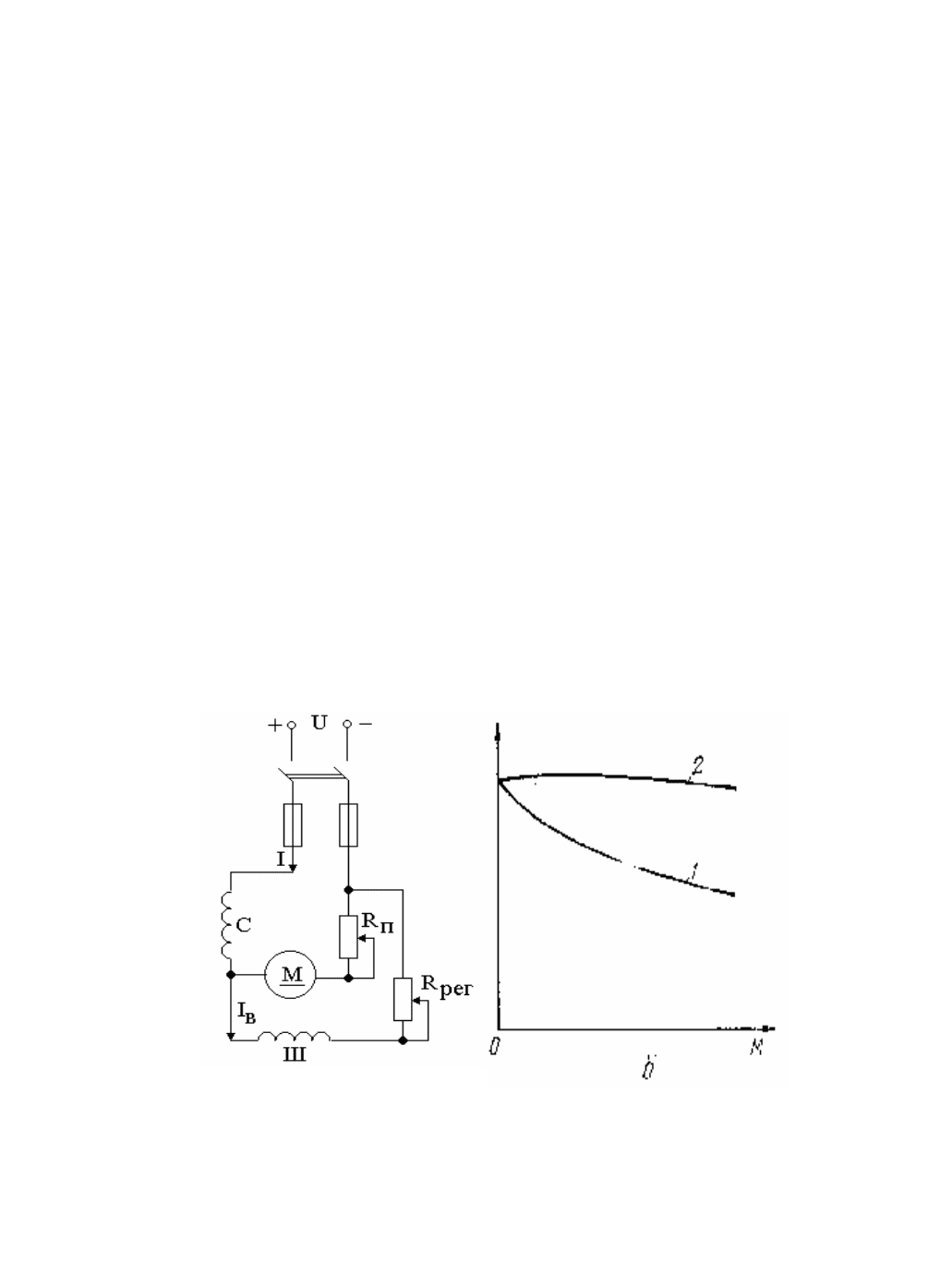
5.18. Двигатель смешанного возбуждения
Двигатель имеет параллельную и последовательную обмотки возбуждения
(рис. 3,24,а), которые могут быть включены согласно, т. е. так, чтобы их магнитные
потоки складывались, или встречно.
а
Рисунок 3.24 – Двигатель смешанного возбуждения

Основной обмоткой возбуждения двигателя, создающей более 70 % м. д. с.
или потока статора, обычно является параллельная обмотка (например, в двигателях
единой серии П). При согласном включении обмоток возбуждения двигатель
приобретает промежуточные свойства двигателей параллельного и
последовательного возбуждения (см. механическую характеристику на рис. 3.24,б).
Важным преимуществом в сравнении с двигателем последовательного
возбуждения является то, что при малых нагрузках и даже при XX двигатель
смешанного возбуждения имеет ограниченную частоту вращения.
При встречном включении обмоток возбуждения их потоки вычитаются, что
приводит к более жесткой механической характеристике (кривая 2 на рис. 3.24,б).
Обычно стремятся получить механическую характеристику со стабильной частотой
вращения.
Двигатели смешанного возбуждения применяются в установках, где
требуются большой пусковой момент и работа при малых моментах нагрузки с
возможностью регулирования частоты вращения в широких пределах (например, в
приводах насосов, компрессоров, строгальных станков, прокатных станов и в
электротяге). Это основные двигатели на электровозах, электропоездах с
моторными вагонами и тепловозах. Их вспомогательная параллельная обмотка
возбуждения позволяет осуществлять генераторное (рекуперативное) торможение с
возвратом электроэнергии в сеть на длинных спусках дорог, особенно в горной
местности. Регулирование частоты вращения двигателей производится с помощью
регулировочного реостата R
рег
в параллельной цепи возбуждения, реверсирование
— изменением направления тока якоря.
5.19. Машины постоянного тока отечественного производства
Наши электромашиностроительные заводы выпускают много типов машин
постоянного тока как общепромышленного, так и специализированного
применения, в том числе двигатели тяговые для электротранспорта, крановые
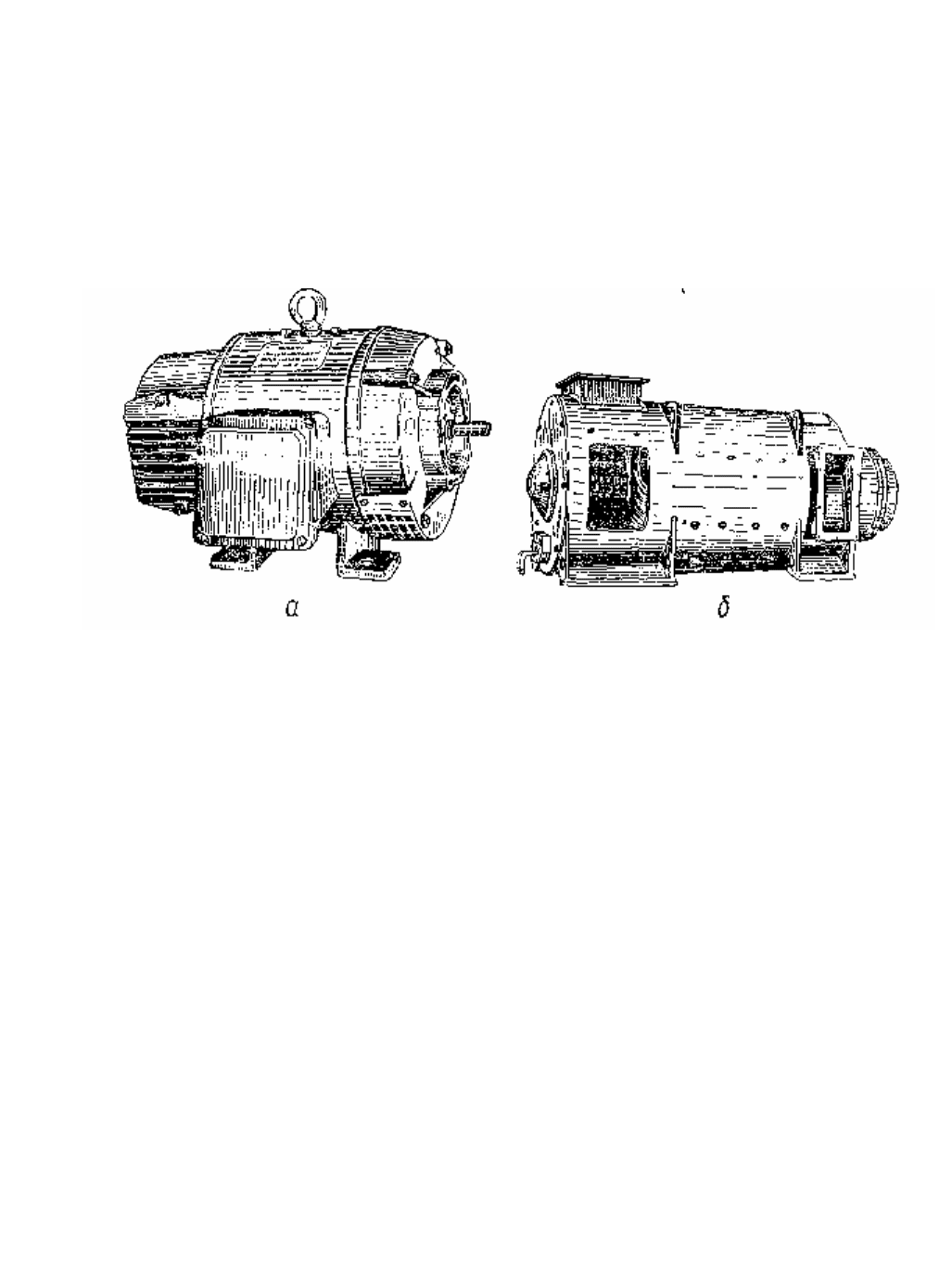
(металлургические) и экскаваторные. Внедренная в производство первая единая
серия машин постоянного тока общепромышленного и специализированного
назначения (рис. 3.25,а) по мощности состояла из трех групп машин: 0,3—200 кВт
(габариты 1—11); 200—1400 кВт (габариты 12—17); 1400—10 000 кВт (габариты
18—26).
Рисунок 3.25 – Внешний вид машин постоянного тока единых серий П
(а) и П2 (б)
Эта серия машин постоянного тока в последние годы заменена новой, более
совершенной серией П2 (рис. 3.25,б). В частности, машины мощностью 0,13—200
кВт защищенного исполнения на напряжения ПО, 220, 340—440 В выполняются с
диапазонами высот осей вращения 90—315 мм и частот вращения 500—3000
об/мин.
Крупные двигатели постоянного тока используются в приводах прокатных
станов, судовых машин, шагающих экскаваторов, погруженных плавучих буровых
установок и ряда других механизмов.
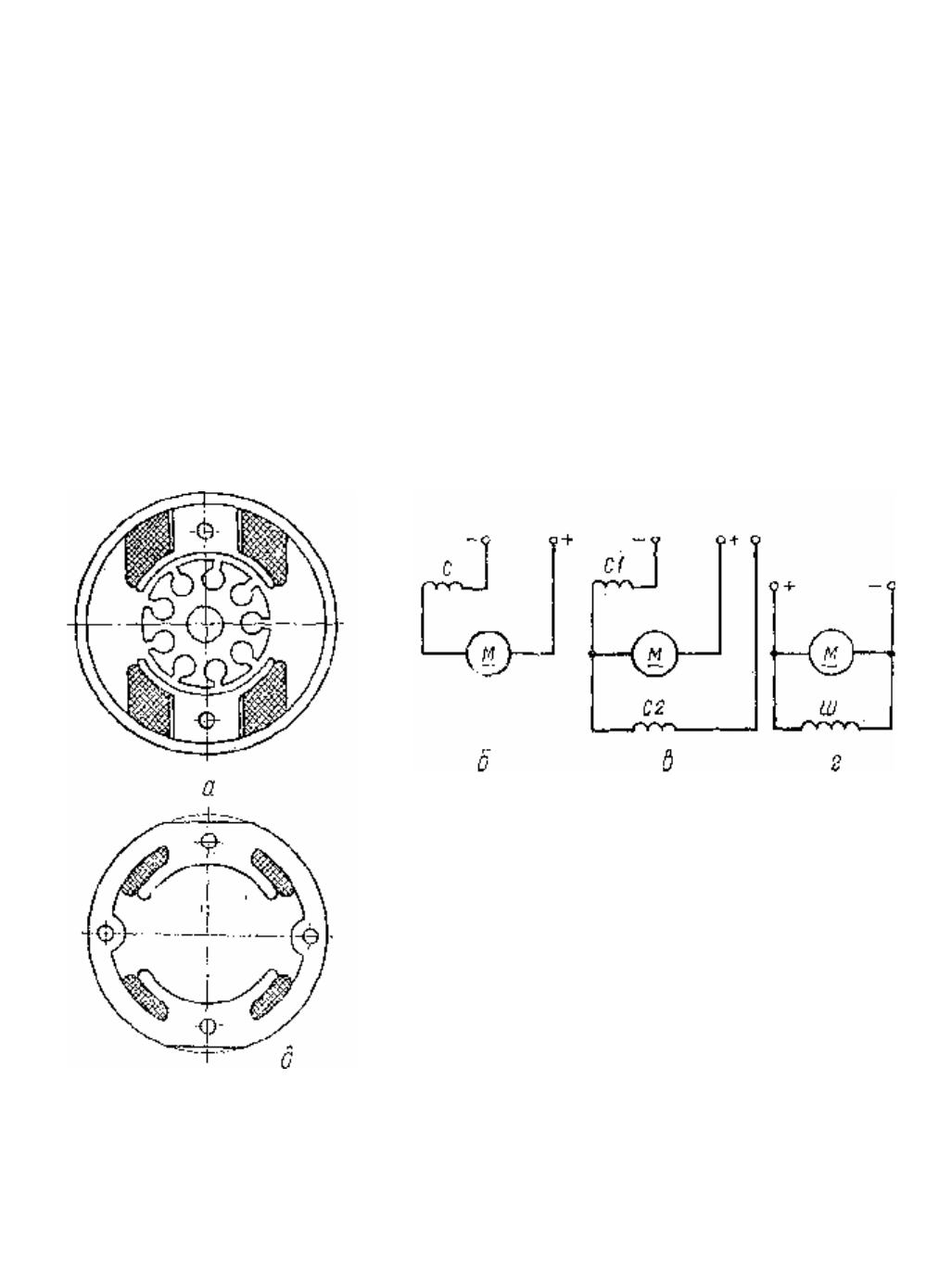
5.20. Микродвигатели постоянного тока
Электродвигатели постоянного тока малой мощности (до 600 Вт) широко
применяются для привода различных механизмов и в качестве исполнительных
управляемых двигателей в системах автоматики [10]. Конструктивно они часто
похожи на обычные машины постоянного тока. Их статор выполняется в виде
стальной литой станины с приставными полюсами (рис. 3.26,а), сердечники которых
могут быть цельными или из листов электротехнической стали толщиной 0,5 мм.
Конструктивно наиболее прост индуктор микродвигателей с возбуждением от
постоянных магнитов.
Рисунок 3.26 - Микродвигатели постоянного тока
Микродвигатели обычно имеют последовательную (сериесную) обмотку
возбуждения (рис. 3.26,б), что обеспечивает им большой пусковой момент и

облегчает безреостатный пуск. Реверсивные микродвигатели чаще содержат две
обмотки возбуждения (рис. 3.26, в): одну для прямого и другую для обратного
направления вращения. Микродвигатели с параллельной (шунтовой) обмоткой
возбуждения (рис. 3.26,г) применяются реже, обычно лишь мощностью до 20 Вт,
когда требуется постоянство частоты вращения.
Пуск микродвигателей постоянного тока осуществляется без пускового
реостата, так как они имеют относительно большое сопротивление обмотки якоря
(пусковой ток не превышает трех-четырехкратного номинального). Регулирование
их частоты вращения осуществляется изменением напряжения источника.
И с п о л н и т е л ь н ы е м и к р о д в и г а т е л и постоянного тока широко
применяются в различных схемах автоматики для преобразования электрических
сигналов в механическое перемещение (вращение вала). Наиболее
распространенные микродвигатели с электромагнитным возбуждением имеют
независимое возбуждение (рис. 3.27,а). Управляющей (на которую подается сигнал
управления) может быть как обмотка якоря, так и обмотка возбуждения. В микро-
двигателях с постоянными магнитами (обычно из сплава «магнико») управляющей
является обмотка якоря (рис. 3.27,б). Исполнительные микродвигатели
конструктивно отличаются от микродвигателей общепромышленного применения
тем, что имеют шихтованные не только сердечник якоря, но и полюса и станину
индуктора (см. рис. 3.26,д).
Разновидность исполнительных микродвигателей — микродвигатели с
гладким беспазовым якорем. Их якорь не имеет пазов, обмотка располагается на его
цилиндрической поверхности. Это уменьшает индуктивное сопротивление обмотки
якоря, приводит к улучшению коммутации и повышению его быстродействия.
Малоинерционные исполнительные микродвигатели имеют полый
неферромагнитный якорь (рис. 10.27,в). Для уменьшения момента инерции и
увеличения быстродействия обмотка якоря отделяется от массивного
ферромагнитного сердечника, который делается неподвижным и закрепляется на
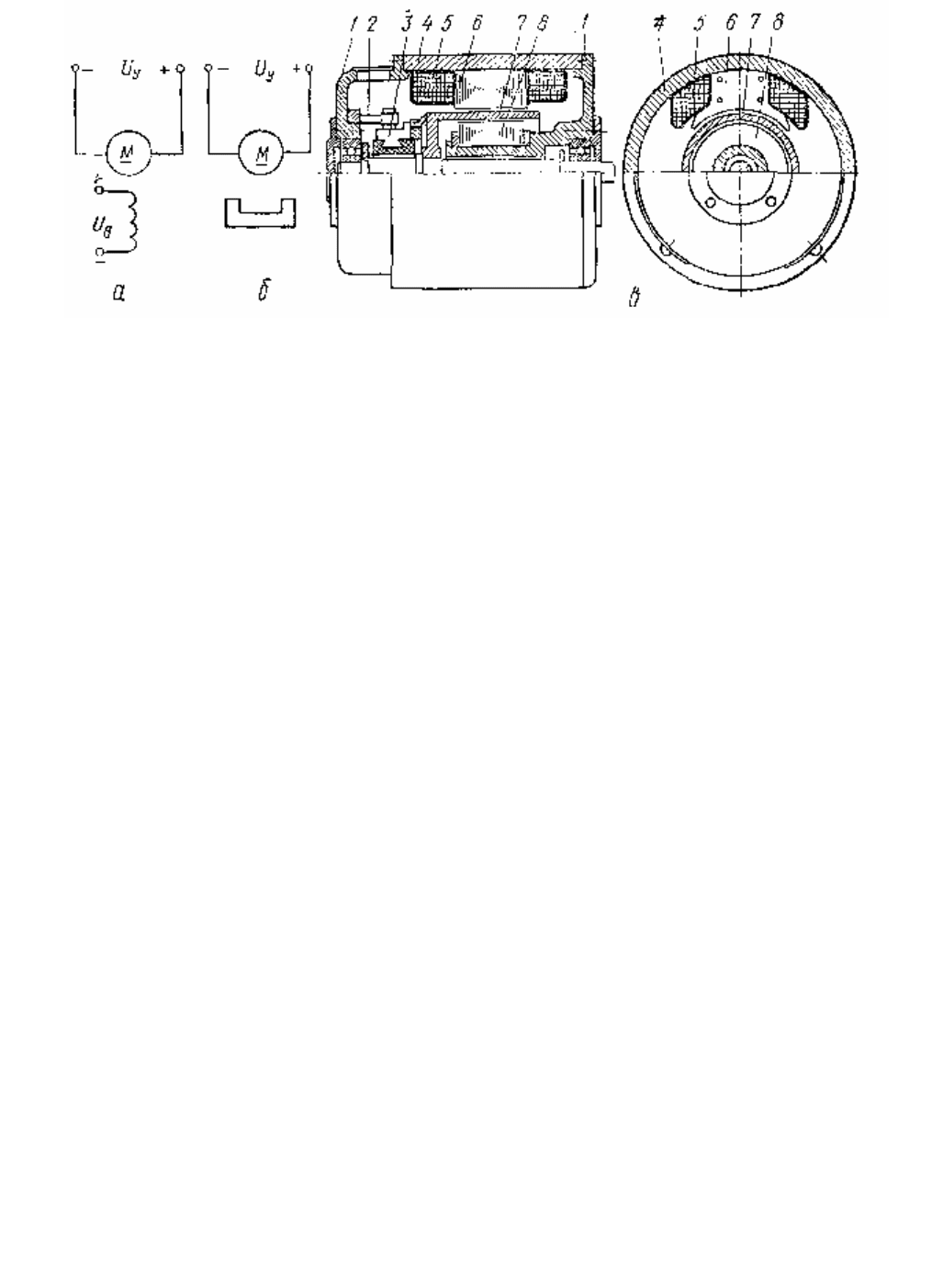
Рисунок 3.27 – Исполнительные двигатели постоянного тока:
1 – подшипниковые щиты; 2 – щеткодержатель; 3 – коллектор; 4 – станина; 5 –
обмотка возбуждения; 6 – полюс; 7 – полый якорь; 8 – внутренний статор
подшипниковом щите. Обмотка якоря укладывается на полом тонкостенном
неферромагнитном стакане и заливается пластмассой. Ее ответвления соединяются
с пластинами коллектора. Разработаны малоинерционные исполнительные
микродвигатели с печатными обмотками якоря. Они изготовляются серий ПЯ и
ПЯР с дисковым или цилиндрическим якорем.
Наша промышленность серийно выпускает различные, обычно
двухполюсные, микродвигатели постоянного тока мощностью от долей ватта до
600 Вт (габариты 01—06) на номинальные напряжения 6—220 В и частоты
вращения 1400—12 000 об/мин в открытом, защищенном и закрытом исполнениях:
новой серии ПБС и серии ПЛ общепромышленного применения параллельного
возбуждения, а также исполнительные микродвигатели серии СЛ параллельного и
последовательного возбуждения (СЛ-М — с постоянными магнитами); мало-
инерционные с полым якорем серий ДП, ДПМ и ДПР в закрытом исполнении с
возбуждением от постоянного магнита; серий ДИМ-РС и ДПР-РС с
полупроводниковыми регуляторами частоты вращения, разработанные па базе
микродвигателей серий ДПМ, ДПР: серии ДПБ (якорь полый, немагнитный,
бескаркасный); серии МИ в закрытом исполнении (МИ-Т — с встроенным

тахогенератором); серий СД и ПДЗ; серии ПВ — встраиваемые (В) параллельного
возбуждения в открытом невентилируемом исполнении.
5.21. Универсальные и однофазные коллекторные двигатели
Все более широкое применение как в бытовых приборах, так и в приводах
различных механизмов, и в устройствах автоматики находят универсальные
коллекторные двигатели, нормально работающие в сетях переменного или
постоянного тока (
U
U
~
=
). Двигатели устроены так же, как и двигатель постоянного
тока последовательного возбуждения, и имеют упрощенную конструкцию (рис.
3.28,а и б). Магнитная система двигателя выполняется полностью шихтованной.
Примерно одинаковая частота вращения двигателя на постоянном и переменном
токах достигается благодаря тому, что последовательная обмотка возбуждения
выполняется с ответвлениями и в цепь переменного тока включается лишь частично
(см. рис. 3.28,в). Механические характеристики двигателя показаны на рис. 3.28,г.
Коллекторные двигатели переменного тока конструктивно и внешне похожи
на машины постоянного тока, но существенно отличаются от них (имеют
конструктивные усложнения): сердечник индуктора (статор) собирается из листовой
электротехнической стали, как и у машин переменного тока; в пазах статора
(обычно неявнополюсного), кроме главной обмотки возбуждения и обмотки
добавочных полюсов (компенсирующих реакцию якоря), размещается и
компенсирующая обмотка для прямой компенсации магнитного поля якоря и
уменьшения индуктивного сопротивления двигателя с целью повышения его соs
ϕ
.
Все эти три обмотки соединяются с якорем последовательно.
Наибольшее применение получили коллекторные двигатели переменного
тока последовательного возбуждения, позволяющие плавно и экономично
регулировать частоту вращения (рис. 3.28,г) при относительно небольшом