Дрючин В.Г., Ткачев Р.Ю. Теоретические основы электротехники. Электрические цепи
Подождите немного. Документ загружается.

и при I
в
= const постоянен.
Электромагнитный момент двигателей (3.10)
я1zэм
IkIФkМ
⋅
=
⋅
⋅
=
. (3.26)
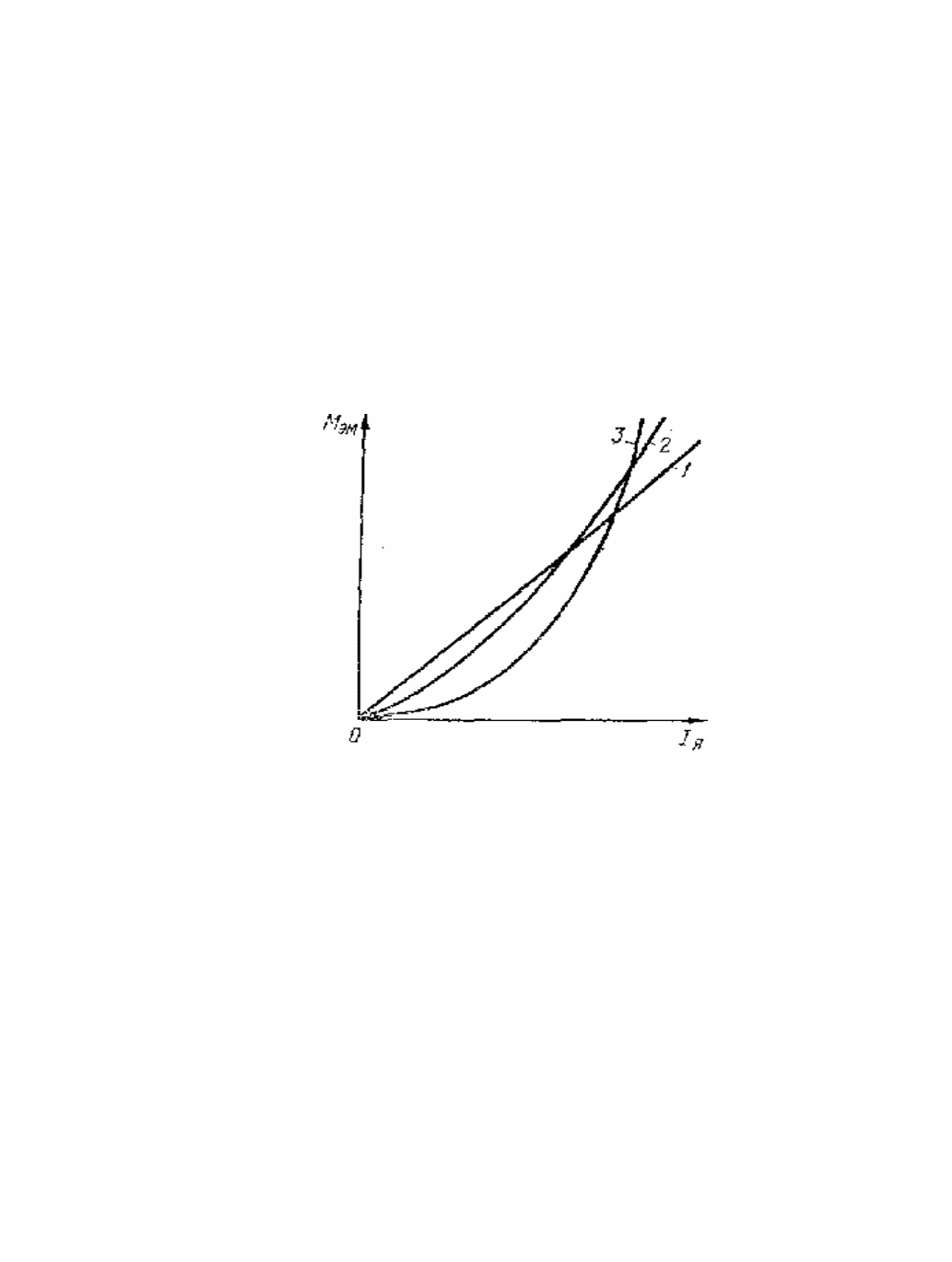
Таким образом, электромагнитный момент двигателей параллельного и
независимого возбуждения (до насыщения магнитопровода) пропорционален току
якоря (прямая 1 на рис. 3.18).
Рисунок 3.18 – Зависимость электромагнитного момента от тока якоря
двигателей постоянного тока при разном возбуждении
В двигателе последовательного возбуждения (см. рис. 3.7,в) обмотка
возбуждения включается последовательно с якорем, ток в нагрузке является
одновременно током якоря и током возбуждения, магнитный поток — функцией
тока якоря и до насыщения магнитопровода пропорционален ему. Следовательно,
электромагнитный момент двигателя М
эм
= kФI
я
пропорционален, квадрату тока
якоря:
2
я
IkМэм ⋅
′
= . (3.27)

Зависимость М
эм
(I
я
) изображена на рис. 3.18 параболической кривой 3.
Двигатель смешанного возбуждения (см. рис. 3.7,г) имеет параллельную и
последовательную обмотки возбуждения, которые обычно включаются согласно.
При этом составляющие магнитного потока полюса Ф (I
в
) и Ф (I
я
) складываются, а
зависимость электромагнитного момента двигателя М
эм
(I
я
) является также
примерно параболической, как показано на рис. 3.18 (кривая 2).
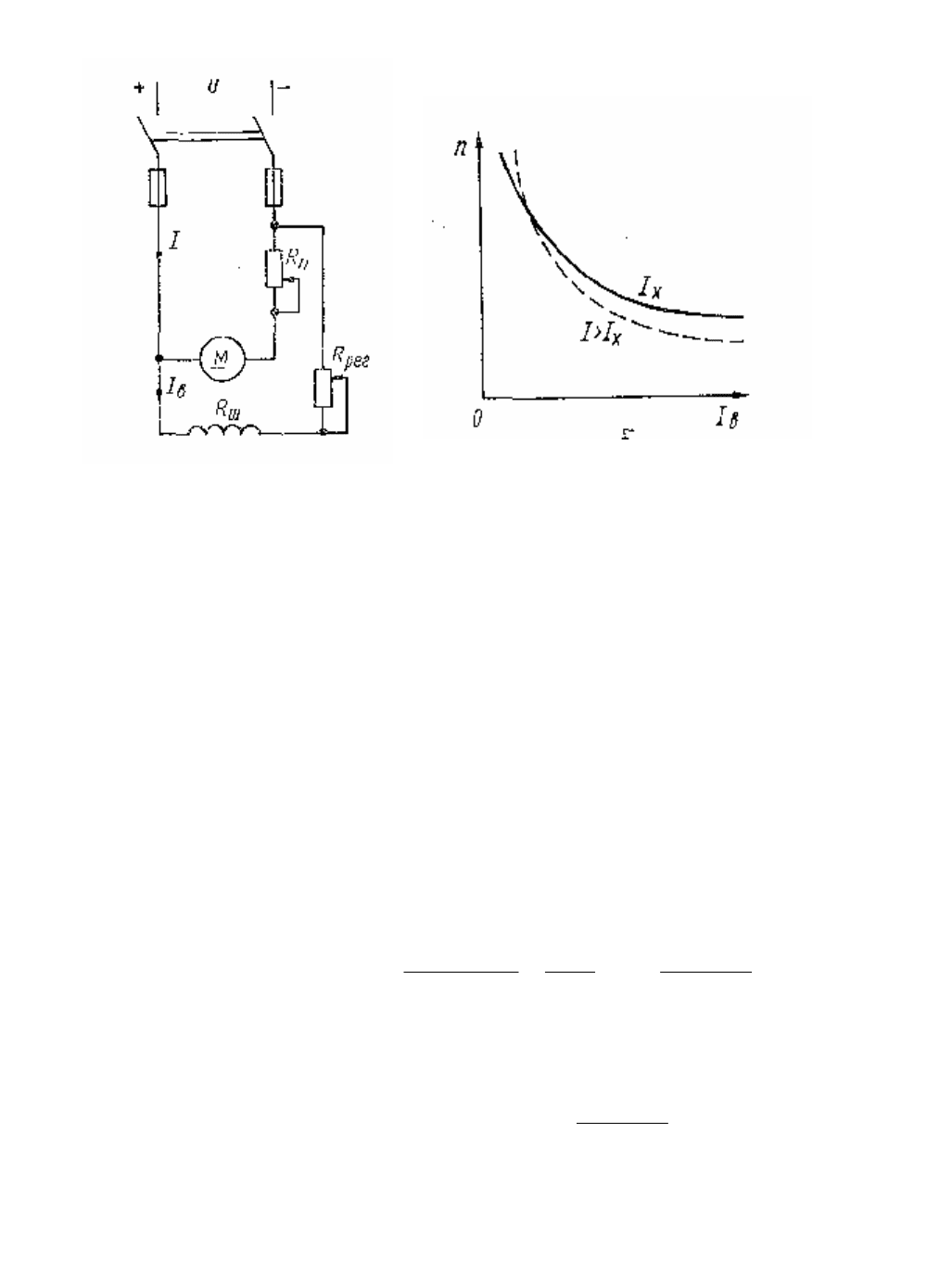
5.15. Двигатель параллельного возбуждения
Схема двигателя показана на рис. 3.19,а. Ток в нагрузке двигателя I = I
я
+ I
в
. В
двигателе обмотка возбуждения подключена к сети параллельно с обмоткой якоря
(до пускового реостата R
п
). Для регулирования частоты вращения двигателя в цепь
обмотки возбуждения включен регулировочный реостат R
рег
. Пуск двигателя
осуществляется при введенном пусковом и выведенном регулировочном реостатах.
Последнее обеспечивает включение обмотки возбуждения при пуске двигателя па
полное напряжение сети U.
Свойства и области применения двигателя определяются его
характеристиками. Регулировочная характеристика холостого вращения дает
зависимость частоты вращения якоря от тока возбуждения при отсутствии нагрузки
двигателя: n (I
в
) при I = I
х
и U=const.
Как следует из уравнения (3.24), при U=const и I
я
=I
х
<<I
я.ном
частота вращения
двигателя обратно пропорциональна магнитному потоку статора (току возбуждения
I
в
), т. е. характеристика носит гиперболический характер (рис. 3.19,б).
С резким уменьшением тока возбуждения, особенно при обрыве в цепи
возбуждения (I
в
= 0), когда поток статора уменьшается до потока остаточного
намагничивания Ф
0
, частота вращения двигателя быстро увеличивается —
двигатель «идет вразнос». В этом случае двигатель надо немедленно отключить от
сети. Применяется и автоматическая защита двигателей, отключающая их от сети
при недопустимом уменьшении потока (ниже 1/3 Ф
ном
).
а б
Рисунок 3.19 – Двигатель постоянного тока параллельного возбуждения
Механическая характеристика двигателя представляет собой зависимость
частоты вращения от вращающего (электромагнитного) момента на валу, т. е. n(М)
при I
в
= const и U = const.
Подставив в уравнение (3.24) значение тока якоря из выражены:
вращающего момента М = kФI
я
, получим
2
яяя
Ф
k
с
R
М
Ф
c
U
Ф
с
IRU
n
⋅⋅
⋅−
⋅
=
⋅
⋅
−
= , (3.28)
или
2
я
0
Ф
k
с
R
Мnn
⋅⋅
⋅−= , (3.29)
где частота идеального ХХ двигателя (когда момент М=0)
Ф
c
U
n
0
⋅
== . (3.29)
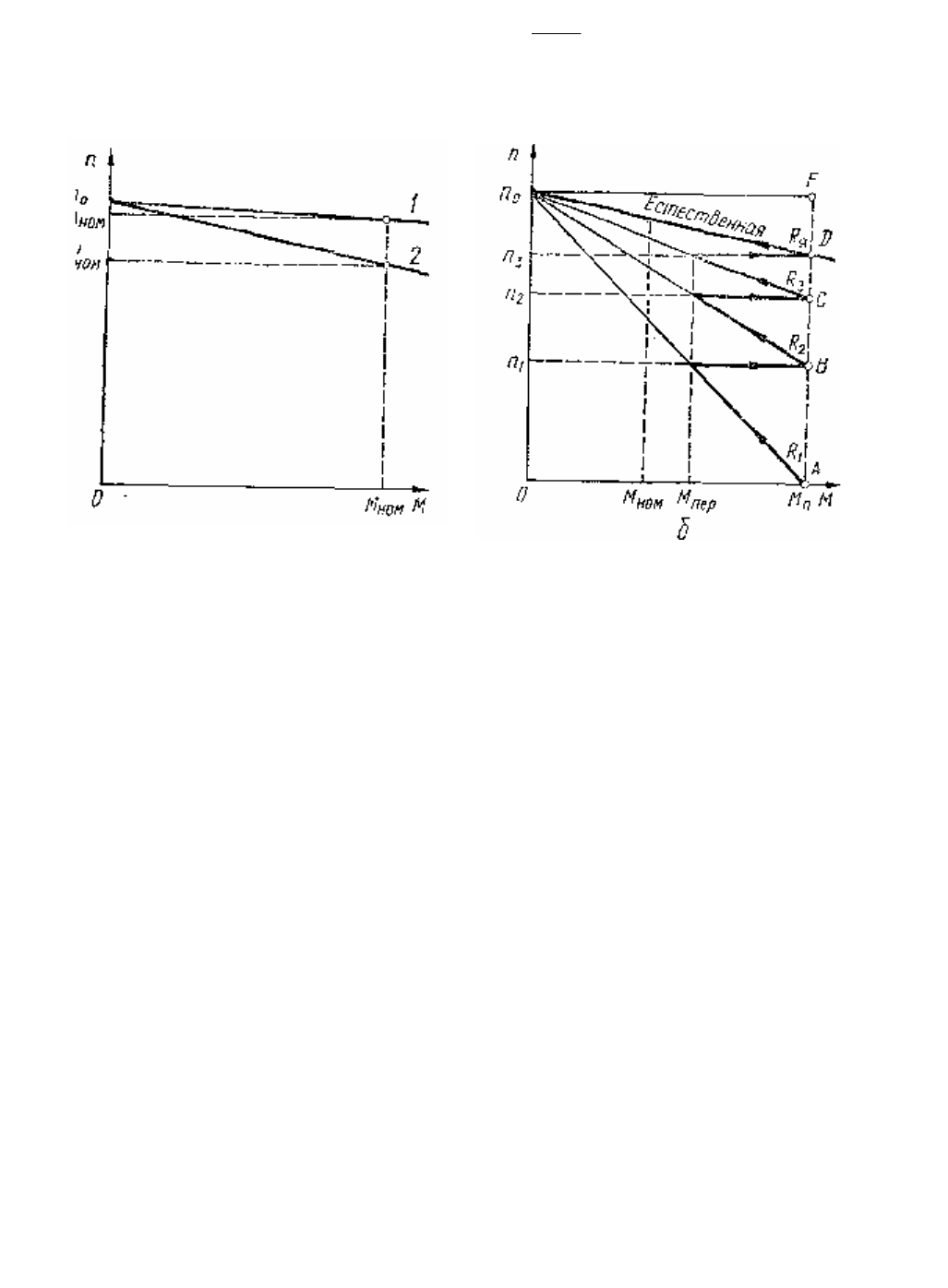
а
Рисунок 3.20 – Механические характеристики двигателя параллельного
возбуждения
Механическая характеристика двигателя параллельного возбуждения (рис.
3.20, а) — жесткая (при номинальной нагрузке снижение частоты вращения не
превышает 0,05
÷
0,1n
0
), график ее практически является прямой линией.
В соответствии с уравнением (3.25) двигатель, кроме естественной
механической характеристики 1 при R
пр
= 0 (см. рис. 3.20, а) имеет еще и
искусственные (или реостатные) характеристики, каждая из которых
соответствует определенной ступени пускового (или пускорегулирующего)
реостата. На рис. 3.20, а показана искусственна характеристика 2 для одной
(последней) ступени R
п
.
Пуск двигателя (рис. 3.20,б) осуществляется с полностью включенным
реостатом R
п
от М
п
> М
с
(момента статического сопротивления). При моменте М
пер
реостат R
п
ступенчато переключается и происходит переход с одной характеристики

на другую — с меньшим сопротивлением пускового реостата. Разгон якоря
кончается с выходом на естественную характеристику при полностью выключенном
реостате. Установившийся режим работы двигателя соответствует равенству
моментов М = М
т
при n=const.
Из реостатных механических характеристик следует также, что при наличии
пускорегулирующего реостата (резистора) R
пр
в цепи якоря можно регулировать
частоту вращения двигателя n, которая при данном тормозном моменте будет
зависеть от сопротивления цепи якоря. Частота вращения уменьшается при
увеличении сопротивления реостата R
пр
.
Естественная характеристика — прямая (см. рис. 3.20, а), строится по двум
точкам (М = 0, n=n
х
) и (М
ном
, n
ном
) на основании каталожных данных Р
ном
, U
ном
,
I
я.ном
, R
я
, n
ном
и равенств (3.24), (3.29):
;n/Р9550М
номномном
⋅
=
,
Ф
с
IR
nn
ном.яя
0ном
⋅
⋅
−=
или, так как n
0
=U
ном
/(сФ),
.U/IRnnn
номном.яя00ном
⋅
⋅
−
=
Отсюда частота вращения идеального XX двигателя (при М = 0)
.
IRU
U
nn
ном.яяном
ном
ном0
⋅−
⋅= (3.30)
Искусственная характеристика для заданного сопротивления R (прямая)
строится также, по двум точкам n
0
и М
ном
, но при
ном
nn
′
=
— уже по реостатной
характеристике, соответствующей сопротивлению в цепи якоря R
я
+R. В этом
случае номинальная частота вращения (см. рис. 3. 20, а)
,I
U
RR
nnn
ном.я
ном
я
00ном
⋅
+
⋅−=
′
.
U
I)RR(U
nn
ном
ном.яяном
0ном
⋅
+
−
⋅=
′
(3.31)
С увеличением сопротивления R в цепи якоря наклон механической
характеристики (прямой) увеличивается — она становится более мягкой. Каждой
ступени реостата соответствует своя искусственная характеристика двигателя. Все
они проходят через точку n
0
, образуя семейство характеристик (см. рис. 3.20,б).
Сопротивление пускового реостата двигателя R
н
, равное сумме
сопротивлений его ступеней, выбирается из необходимости М
п
> М
с
и условия
I
п
= 2
÷
2,5I
ном
.
В двигателе параллельного возбуждения можно осуществить электрическое
торможение: противовключением, генераторное (рекуперативное) и динамическое.
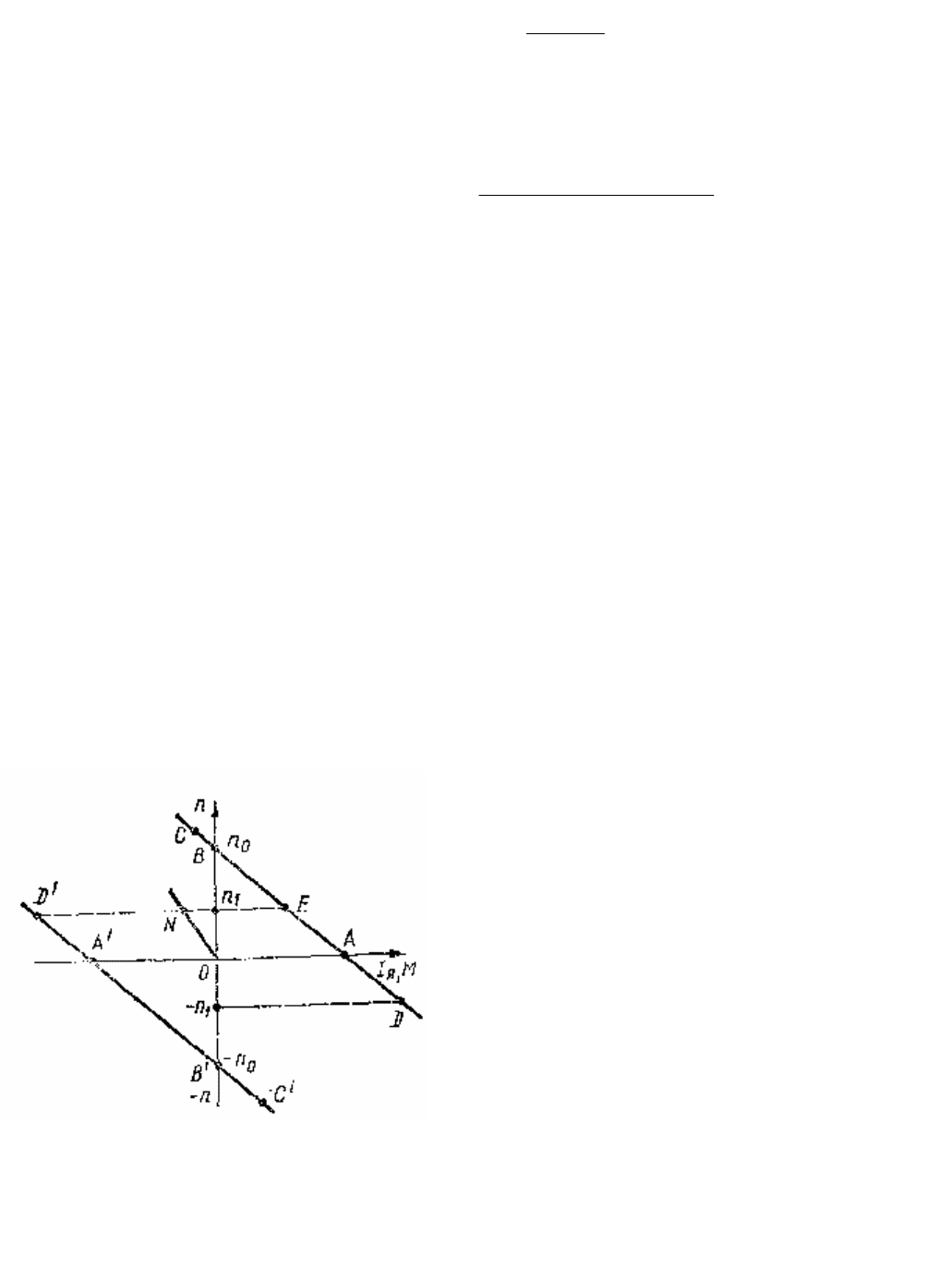
Во всех этих режимах в электродвига-
теле создается тормозной момент, так как его
электромагнитный момент действует встречно
вращению якоря машины. Тормозные режимы
работы двигателя параллельного возбуждения
можно рассмотреть на механической
характеристике (рис. 3.21), продолжив ее в
обе стороны за пределы первого квадранта.
Торможение противовключением
обычно осуществляется изменением
направления тока якоря на ходу двигателя, как
Рис.
3.21.
Механическая
характеристика двигателя
параллельного возбуждения

при реверсировании. В этом случае электромагнитный момент двигателя меняет
свое направление и действует встречно, т. е. тормозит вращающийся в прежнем
направлении якорь. Такое торможение сопровождается значительным увеличением
тока якоря. При переключении цепи якоря на торможение изменяется полярность
напряжения U на якоре. Ток якоря резко увеличивается согласно уравнению (3.22)
равен I
я
=
яя
R/)EU(R/)EU(
+
−
=
−
−
.
Для его ограничения в цепь якоря на время торможения последовательно
вводится добавочный резистор сопротивлением R
т
. Чтобы двигатель после
торможения не начал вращаться в обратную сторону, при снижении частоты
вращения до нуля его необходимо отключить от сети.
Режим противовключения двигателя может быть и без переключения цепи
якоря, например при спуске груза подъемным краном, когда двигатель лебедки
сдерживает опускание груза. Двигатель при этом включается на подъем груза, по
его якорь под действием массы груза вынужден вращаться в обратную сторону — в
сторону спуска груза.
Режиму противовключения па диаграмме (см. рис. 3.21) соответствует
участок АD механической характеристики. Допустим, что двигатель работает в
точке Е участка АВ характеристики и вращается с частотой n
1
. При переключении
цепи якоря ток I
я
и вращающий момент М двигателя меняют скачкообразно
значения и знаки при прежней частоте вращения n
1
, так как происходит переход на
механическую характеристику
D
C
′
′
в точку D'. Торможение двигателя
соответствует режиму его работы в точке D характеристики СD, где сохранены
прежние знаки тока якоря и момента двигателя, но условно изменено направление
вращения якоря с n
1
на —n
1
. В процессе торможения состояние двигателя на
характеристике изменяется от точки D' к точке A' на характеристике С'D' и от D к А
на характеристике СD.
Генераторное торможение наступает, если якорь двигателя под действием
внешнего воздействия, например, при спуске груза, превысит частоту вращения

идеального XX n
0
. Э. д. с. якоря увеличится и станет больше напряжения сети (Е=U
при n=n
0
). В результате ток якоря I
я
=(U— Е)/R
Я
станет отрицательным, т. е. изменит
свое направление. Машина без изменения направления вращения будет работать в
режиме генератора за счет механической энергии извне, а ее электромагнитный
момент станет тормозным. Поскольку такое торможение сопровождается
возвращением энергии в сеть, то оно называется еще рекуперативным (от лат.
recuperatio — возвращение) торможением. На характеристике (см. рис. 3.21) ему
соответствует прямая ВС. Рекуперативное торможение широко применяется на
электрифицированных железных дорогах (на длинных участках спуска) и является
важным источником экономии электроэнергии.
Динамическое торможение чаще всего используется для быстрого останова
двигателя. Торможение осуществляется отключением якоря от сети (цепь
возбуждения остается включенной) и замыканием его на резистор сопротивлением
R
д
. Ток якоря, вызванный э. д. с. Е, вращающейся по инерции машины (фактически
работающей в режиме генератора), имеет обратное направление в сравнении с
режимом двигателя и потому создает тормозной электромагнитный момент. В
конце торможения он становится равным нулю (n=0, Е=0). Динамическому
торможению соответствует прямая ОN характеристики n(М) на рис. 3.21. С
увеличением тормозного сопротивления R
д
ее наклон к горизонтальной оси
увеличивается, процесс торможения замедляется. Переход от двигательного к
тормозному режиму происходит из точки Е на характеристике СD,
соответствующей частоте вращения двигателя n
1
в точку N на характеристике ОN.
Двигатели параллельного возбуждения широко применяются для привода
металлорежущих станков, насосов, вентиляторов, центрифуг, ткацких машин,
прокатных станов, шахтных подъемников, в качестве тягового двигателя
подвесных электрифицированных дорог, в судовых и других установках,
требующих стабильной частоты вращения с возможностью плавного
регулирования ее в широких пределах в зависимости от требований
технологического процесса.
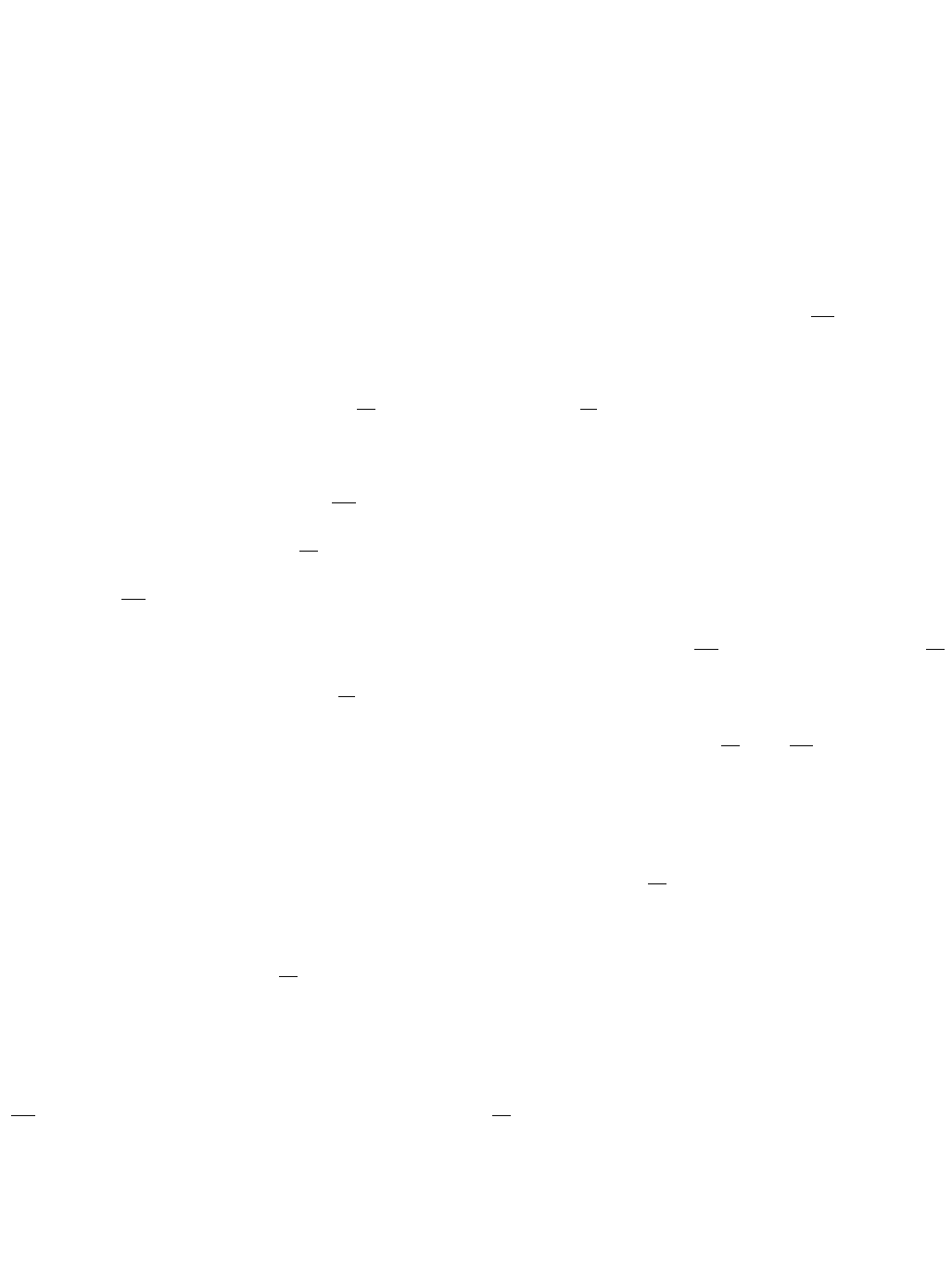
5.16. Система «генератор—двигатель» (Г—Д)
Система Г—Д осуществляет безреостатный пуск и регулирование в
широких пределах частоты вращения двигателя постоянного тока независимого
возбуждения изменением как напряжения, подводимого к якорю, так и тока в цепи
его возбуждения.
Система Г—Д (рис. 3.22,а) состоит из четырех электрических машин:
регулируемого двигателя постоянного тока независимого возбуждения M , который
приводит в движение рабочую машину РМ (исполнительный механизм), генератора
независимого возбуждения G, возбудителя В (генератора параллельного
возбуждения относительно небольшой мощности) и первичного двигателя
(трехфазного асинхронного M или синхронного), установленных на общем валу.
Напряжение генератора G непосредственно подается на якорь регулируемого
двигателя M .
Обмотки возбуждения регулируемого двигателя M и генератора G
питаются от возбудителя В через реостаты. Реостатом R
рег
изменяют ток
возбуждения и, следовательно, напряжение на якорях машин G и M . Реостатом
R
р.д
можно изменять поток полюса регулируемого двигателя и, следовательно, его
механическую характеристику. Пуск двигателя производится без пускового
реостата при достаточно низком напряжении генератора G. Плавное регулирование
частоты вращения двигателя в пределах до 8 : 1 и выше осуществляется изменением
напряжения генератора G с помощью регулировочного реостата R
рег
.
Источником регулируемого напряжения в системе Г—Д может быть и
полупроводниковый преобразователь на тиристорах. Для реверсирования двигателя
M в цепи возбуждения генератора G предусматривается переключатель,
изменяющий направление тока возбуждения. Дальнейшее расширение пределов
регулирования частоты вращения двигателя (до 20 : 1 и более) осуществляется
изменением тока в цепи возбуждения двигателя с помощью
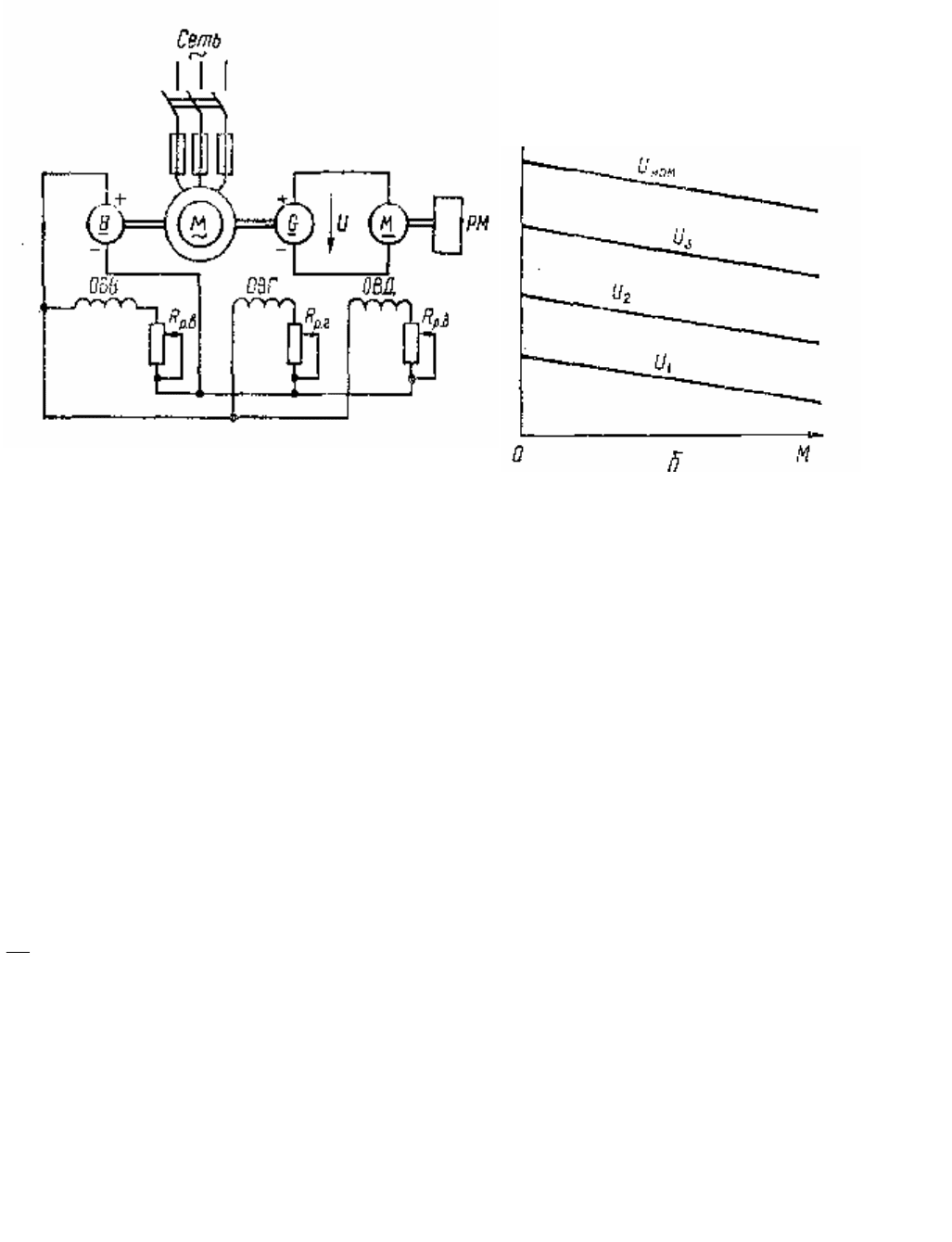
Рисунок 3.22 – Схемы системы Г—Д (а) и механические
характеристики двигателя постоянного тока в этой системе (б)
регулировочного реостата R
р.д
. Такое регулирование обычно ведется путем
уменьшения магнитного потока при небольших моментах нагрузки для
увеличения частоты вращения сверх номинальной (при условии, чтобы ток якоря
не превысил номинального значения).
Искусственные механические характеристики двигателя постоянного тока
M в системе Г—Д при I
в
.
ном
и различных значениях напряжения (U
1
<U
2
<U
3
<U
ном
)
на якоре имеют вид наклонных параллельных линий (рис. 3.22,б).
К основным недостаткам системы Г—Д относятся: низкий общий к. п. д.
(0,6—0,7 при номинальной нагрузке) из-за трехкратного преобразования энергии,
потребляемой из сети; громоздкость; большая инерционность регулирования;
высокая стоимость и трудоемкая эксплуатация.
Система Г—Д применяется в тех случаях, когда необходимо обеспечить
а
п