Дипломная работа: Синтез гибридной нейронной сети для управления двухмассовой электромеханической системой с зазором. 2003 г
Подождите немного. Документ загружается.

Мiнiстерство освiти i науки Украïни
Нацiональний технiчний унiверситет
«Харкiвський полiтехнiчний iнститут»
Кафедра «Автоматизованi електромеханiчнi системи»
ПОЯСНЮВАЛЬНА ЗАПИСКА
ДО ДИПЛОМНОЇ РОБОТИ НА ТЕМУ:
«Синтез гібридної нейроної сеті для керування
двохмасової електромеханічної системи з зазором»
2
ПЕРЕЧЕНЬ ИСПОЛЬЗУЕМЫХ СОКРАЩЕНИЙ
АД – асинхронный двигатель;
АКФ – автоколебания фрикционные;
АЦП – аналого-цифровой преобразователь;
ГА – генетический алгоритм;
ГНС – гибридная нейронная сеть;
НС – нейронная сеть;
МНС – многослойная нейронная сеть;
МНК – метод наименьших квадратов;
ПИ регулятор - пропорционально интегральный регулятор;
ЦАП – цифро-аналоговый преобразователь;
ЭМС – электромеханическая система;
ANFIS - Adaptivе Neuro Fuzzy Interference System - адаптивная нейронная нечеткая
система вывода, разновидность гибридных нейронных сетей;
DSP – Digital Signal Prozessor - цифровой сигнальный процессор;
3
СОДЕРЖАНИЕ
Перечень условных обозначений ............................................................................................... 2
Введение ......................................................................................................................................... 5
1 Обзор литературы....................................................................................................................... 7
1.1 Применение гибридных сетей в виде регулятора ............................................................... 7
1.2 Постановка задач дипломной работы. ................................................................................ 12
2. Описание объекта регулирования. ........................................................................................ 13
2.1 Параметры объекта регулирования ..................................................................................... 13
2.2 Предварительные эксперименты. ........................................................................................ 18
3. Построение математической модели .................................................................................... 23
4. Сущность гибридной нейронной сети и принципа регулирования на ее основе ............ 29
4.1 Кратко о фаззи регулировании ............................................................................................ 29
4.2 Нейронная интерпретация фаззи регулятора и гибридной сети. Принципы
функционирования каждого из ее элементов. .......................................................................... 34
4.3 Особенности различных гибридных сетей и выбор сети ANFIS архитектуры.............. 36
4.4 Принципиальная схема применения нейронной сети ....................................................... 43
4.5 Исходные параметры сети .................................................................................................... 55
4.6 Обоснование выбора ПО и описание алгоритма функционирования ............................. 57
4.7 Автоматическое определение параметров нейронной сети .............................................. 59
4.8. Параметры обученной нейронной сети.............................................................................. 66
5 Компьютерное моделирование ............................................................................................... 71
5.1 Регулятор с использованием задержек за входе ................................................................ 71
5.2 Регулятор с использованием разностных сигналов ........................................................... 79
5.3 Регулятор с использованием разностных сигналов и с коррекцией управляющего сигнала
использование интегратора ........................................................................................................ 81
5.4 Регулятор с использованием интегратора .......................................................................... 82
5.5 Регулятор с дифференцирующими звеньями на входе ..................................................... 86
5.6 Регулятор на базе прямой и обратной модели с фильтром на входе ............................... 91
6 Экономикическое обоснование дипломной работы ............................................................. 96
6.1 Расчет общих затрат на научно-исследовательскую работу ............................................. 97
6.2 Построение линейного графика работ по НИР .................................................................. 98
4
6.3 Экономическое обоснование целесообразности применения нейронных
сетей для управления нелинейными электромеханическими системами ............................. 99
7. Охрана труда ......................................................................................................................... 101
7.1 Общие вопросы охраны труда .................................................................................................
7.2 Производственная санитария ............................................................................................. 101
7.3 Техника безопасности ......................................................................................................... 103
7.3.1 Конструктивные меры электробезопасности ................................................................ 104
7.4 Схемно-конструктивные меры электробезопасности .................................................... 104
7.4.1 Расчет на отключающую способность ........................................................................... 106
7.4.2 Определение полного сопротивления трансформатора ............................................... 107
7.4.3 Определение активного сопротивления фазного и нулевого защитного
проводников ............................................................................................................................... 108
7.5 Эксплуатационные меры электробезопасности ............................................................... 110
7.6 Пожарная безопасность ...................................................................................................... 110
7.5 Защита окружающей среды ................................................................................................ 111
8 Гражданская оборона ............................................................................................................. 112
Заключение ............................................................................................................................... 115
Список источников информации ............................................................................................ 117
Приложение А .......................................................................................................................... 120
Приложение Б ........................................................................................................................... 126
Приложение В ........................................................................................................................... 135
5
ВВЕДЕНИЕ
Машиностроение представляет собой одну из наиболее наукоемких отраслей, в которой
задачи производства изделий, в конечном итоге, должны решаться, как задачи обеспечения
поступательного развития производства. На этом пути все ярче проявляются основные черты
современных подходов к их решению. И прежде всего - это максимально эффективное
использование всех имеющихся в распоряжении машиностроителей ресурсов. Безусловно, здесь
все более становится актуальной проблема оптимизации использования ресурсов в быстро
меняющихся условиях. Усложнение постановок задач оптимизации в машиностроении требует
особого подхода к выбору аппарата моделирования и оптимизации.
Большие возможности открывает перед машиностроением применение теории сетей с
нейро подобными элементами и развитие нейро сетевых технологий. Эти возможности столь же
значительно отличаются от использования традиционных подходов, с одной стороны, это
позволяет избавиться от многих рутинных вычислений, с другой, позволяет управлять сложными
нелинейными объектами регулирования. Действительно, использование понятия модель-образ
создает исключительные возможности применения формальных методов разработки нейронных
сетей в условиях неполной или быстро меняющейся информации.
В настоящее время решение различных задач в нейро сетевом логическом базисе
становится возможным на основе использования более 30-летнего научного задела в этом
направлении. С развитием робототехники и программно управляемых приводов, требуется решать
все более сложные задачи оптимизации управления, аппроксимации нелинейных функций, и
создания адаптивных быстродействующих регуляторов. Эти регуляторы должны быть просты в
наладке и обслуживании надежны и долговечны. Применение новых систем управления призвано
улучшить качество переходных процессов приводов даже для колебательных и неустойчивых
систем.
Сегодня можно говорить об универсальности нейро сетевых технологий. В современном
электроприводе наметился переход к новым системам управления, основанным на
интеллектуальных регуляторах. Главное отличие интеллектуальных регуляторов состоит в работе
на основе цифровых данных, по программно реализуемому алгоритму, в способности обобщать
получаемые данные, проводить кластеризацию данных и другие операции которые сейчас с
успехом решаются нейронными сетями , фаззи логикой и программно управляемыми системами.
Успехи применения нейронных сетей различной архитектуры и систем нечеткой логики при
решении задач управления сложными нелинейными объектами создают условия для широкого
применения алгоритмов нейронных сетей и фаззи логики на практике.
Так, например, системы с нейрорегуляторами с успехом могут:
- возвращать неустойчивые динамические объекты в зону устойчивости.
- Подавлять колебания в электромагнитной и механической системах.
- Устранение вибраций в механических системах с отрицательным вязким трением.
- Обеспечивать заданный переходный процесс координат объекта управления.
6
Многие промышленные привода в силу протяженности кинематических связей и конечной
жесткости элементов следует рассматривать как двух массовую электромеханическую систему с
упругой связью. К таким системам относятся многие привода станков, лифтов, кранов, или
главный привод колесной пары электропоездов и др.
Так же примером двух массовых систем считаются те, в которых жесткость кинематической
связи между двумя массами резко отличается по величине, как это происходит в приводах с
ременной передачей.
По мере работы оборудования происходит износ рабочих поверхностей и образования
зазоров в зубчатых передачах редукторов и увеличение люфтов в муфтах.
Эти зазоры, будучи приведены к валу двигателя, составляют от долей до единиц и десятков
градусов. Поэтому электропривод должен рассматриваться как электромеханическая система с
зазором. При этом данная система является нелинейной, из-за нелинейной характеристики трения
и влияния с зазора. Такие системы обладают склонностью к колебаниям в силу наличия упругости,
а наличие зазора создает возможность для соударения кинематических звеньев и росту пиковых
значений упругого момента, что приводит к механическому перенапряжению.
Наибольшие проблемы в таких системах связаны с наличием нелинейной характеристики
трения, то есть силы трения от скорости привода, что приводит к значительным колебаниям,
особенно если коэффициент вязкого трения становится отрицательным.
Целью настоящей работы является построение регулятора, основанного на современных
методах управления и выполненного на современной элементной базе, обеспечивающего
снижение пиковых моментов и механического перенапряжения кинематических звеньев.
В отличие от подобных задач, решавшихся на основе традиционных методов , в настоящей
работе рассматривается новый тип нейронных сетей, которые объединяют в себе архитектуру
систем нечеткой логики, сохраняя без изменения уже знакомую структуру фаззи регулятора и в то
же время, обладающих главной способностью нейронных сетей к обучению и автоматической
настройке параметров функций активации и весовых коэффициентов, определяющих поведение
регулятора ANFIS - (Adaptive NeuroFuzzy Interference System) адаптивной нейро-нечеткой
системы заключений. Второе название подобной системы – гибридная нейронная сеть.
Нейронные сети такого вида обладают рядом преимуществ перед другими типами
нейронных сетей, так как объединяют логическую структуру фаззирегулятора и самостоятельное
обучение методами нейронных сетей. Такие сети могут быть использованы для применения в
системах управления сложными нелинейными объектами, поскольку они являются хорошими
аппроксиматорами функций.
В данной области ведутся разработки всего несколько последних лет. И в целом это
направление развития нейронных сетей и построенных на их основе систем управления для
нелинейных электромеханических систем, является новым словом в технологии и принципах
построения сложных интеллектуальных регуляторов.
7
1.ОБЗОР ЛИТЕРАТУРЫ
В большинстве источников по данной тематике указывается на широкие возможности
применения нейрофаззи (NeuroFuzzy) систем как наиболее удобный и наглядный способ
представления нейронного или фаззи регулятора.
1.1 Применение гибридных сетей в виде регулятора
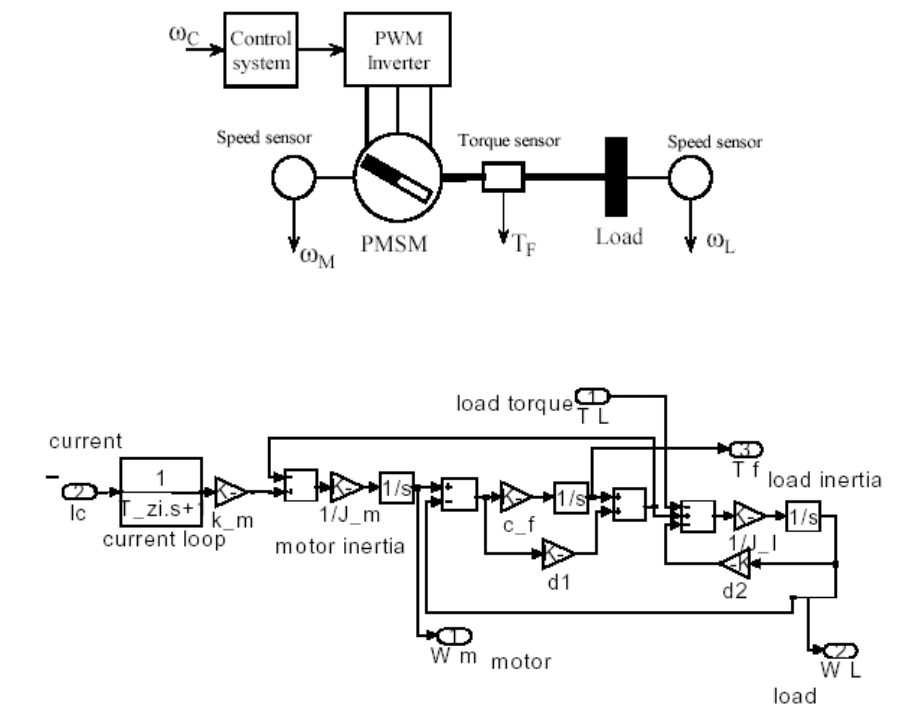
В статье Стефана Брока (Stefan Brock) Application of ANFIS Controller for Two - Mass -
System из технологического университета, Познань, рассматривается применение ANFIS
контроллера в виде наблюдателя состояния в двухмассовом нелинейном приводе.
Рисунок 1.1.1 - Исходная система, объект управления.
Рисунок 1.1.2 - Математическая модель привода
Использование ANFIS сети:
Необходимо спроектировать наблюдатель состояния полного порядка. ANFIS сеть может
использованием как наблюдатель.Для обучения нейронной сети используются данные реакции на
скачок. Эти данные составляют только около 10% возможных режимов работы привода.

8
Наблюдатель состояния в виде нейронной сети позволяет избавиться от дорогостоящего датчика
момента двигателя.
Устойчивость сохраняется при изменении инерции ротора в диапазоне 0.2 .. 2 от
номинального значения.
Рисунок 1.1.3 - Структурная схема привода с ANFIS наблюдателем.
Рисунок 1.1.4 - Переходные процессы при различных моментах инерции.
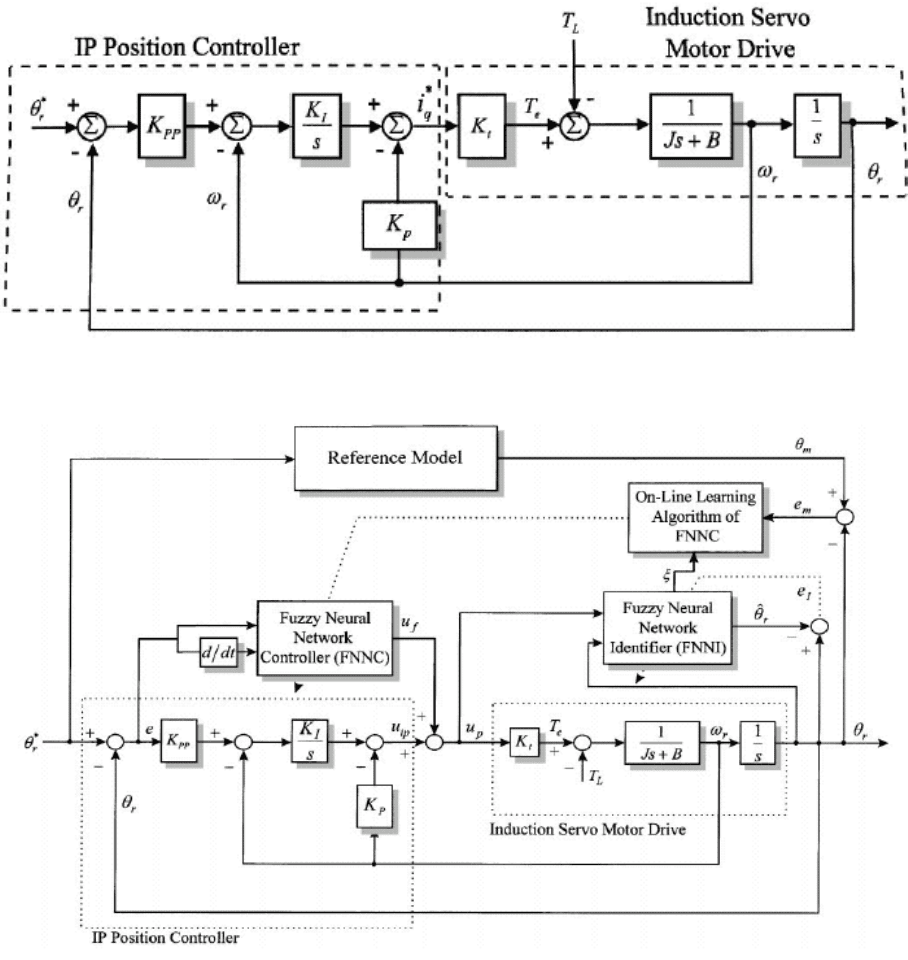
В статье Rong-Jong Wai, Hsin-Hai Lin", Faa-Jeng Lin „ Использование гибридный контроллера для
идентификации управления сервоприводом “ 2000 год.
“Hybrid controller using fuzzy neural networks for identifcation and control of induction servo
motor drive” Rong-Jong Wai!, Hsin-Hai Lin", Faa-Jeng Lin".
Рассматривается применение нейрофаззи системы для идентификации и управления
9
Рисунок 1.1.5 Упрощенная структурная схема сервопривода.
Рисунок 1.1.6. Структурная схема гибридной системы управления.
На рисунке 1.1.6 представлена структурная схема гибридной системы управления. Здесь одна
нейронная сеть(FNNI) используется для имитирования работы реального объекта, с тем чтобы
использовать нейронную модель для обучения регулятора.
В данной схеме фаззи регулятор(FNNC) осуществляет прогнозирование и коррекцию работы
ПИ регулятора.

10
Рисунок 1.1.7. – Переходные процессы в системе с ПИ регулятором.
Рисунок 1.1.8. Переходные процессы в гибридной системе управления.
Как видно из графиков, применение гибридных систем позволяет придавать переходному
процессу системы нужный вид при минимальной ошибке, по сравнению с ПИ регулятором.
В работе авторов Ivan Petrovic , Zoran Rac, Nedjeljko Peric,
«Neural Network Based Predictive Control of Electrical Drives with Elastic
Transmission and Backlash»UNIVERSITY OF ZAGREB, FACULTY OF ELECTRICAL
ENGINEERING AND COMPUTING, DEPARTMENT OF CONTROL AND COMPUTER
ENGINEERING IN AUTOMATION