Дипломная работа: Синтез гибридной нейронной сети для управления двухмассовой электромеханической системой с зазором. 2003 г
Подождите немного. Документ загружается.

11
Рассматривается применение нейронных сетей для управления, в двухмассовом
электроприводе с зазором. В работе указывается на то, что характер переходных процессов
скорости и момента имеет значительные колебательные составляющие, которые не являются
благоприятными для привода.
Классическим подходом являлось построение контуров с ПИ регуляторами или создание
модального регулятора состояния на основе наблюдателей, что так же сопряжено с техническими
трудностями.
Оба подхода предполагают, что детальное знание механической системы, чтобы получать
желательное качество управления, поведения системы, и поэтому не всегда применимо.
Все перечисленные методы требуют измерения состояний переменных двигателя и
вычисления или оценки не измеряемых координат электропривода.
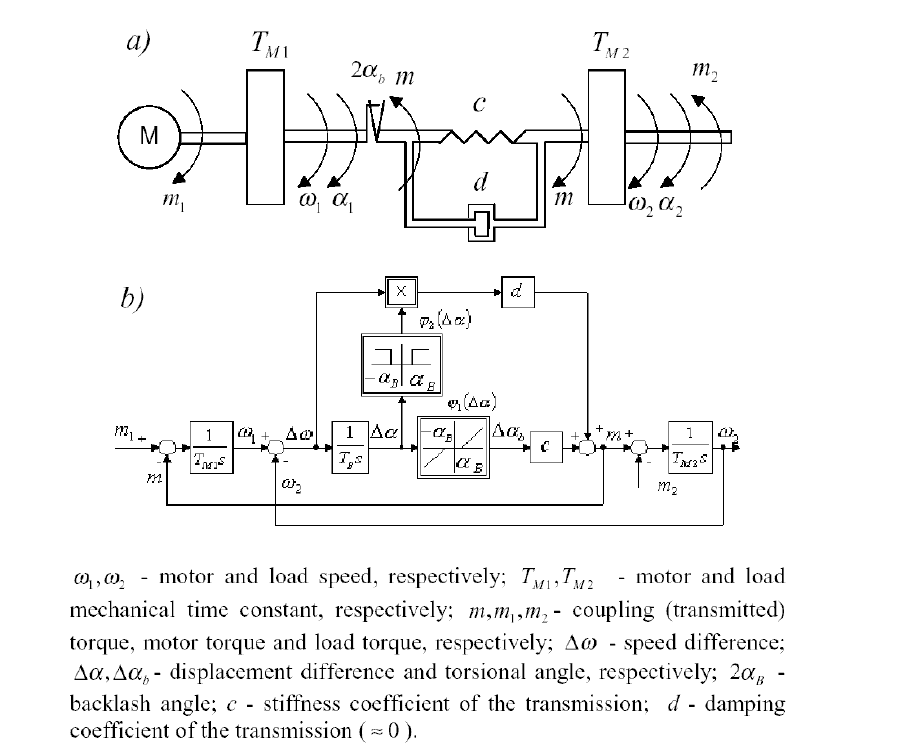
В статье рассматривается нейросетевой подход к управлению нелинейной двухмассовой
системой с зазором. Двигатель представлен «Черным ящиком» регулятор выполнен на базе :
- персептрона (MLP) нейронной сети;
- Прогнозирующей нейронной сети (GPC) ;
- Линеаризованной авторегрессивной сетью с (ARX модель)
Рисунок 1.1.9 – Двух массовая механическая система с зазором.
Авторы делают вывод о том, что нейросетевые подходы в управлении вполне могут
применяться для регулирования подобных систем, что было показано на симуляционной модели в
Matlab.
12
Однако до сих пор нет ни одной практической разработки нейронного регулятора, с
разработкой специфического программного обеспечения для двух массового электропривода с
эластичной связью и зазором. Хотя гибридные нейронные сети находят широкое применение в
системах диагностики, классификации, и управления. Именно это делает настоящую работу
актуальной с точки зрения новизны представленных идей регулирования.
1.2 Постановка задач дипломной работы.
1) Изучение опыта предыдущих разработок в области применения гибридных нейронных
сетей в электроприводе для управления двухмассовой электромеханической системой.
2) Изучение и сравнение различных видов нейро-фаззи сетей.
3) Применение и разработка ГНС с ANFIS архитектурой на основе пакета математических
вычислений Matlab 6.1.R13.
4) Выбор вектора обучения для нейронной сети и выбор оптимальной архитектуры ГНС.
5) Разработка нейронного регулятора и нейронной модели нелинейного объекта управления
– двухмассовой ЭМС с зазором
6) Создание независимой от специальных пакетов разработки нейронных сетей, программы
на языке Matlab как на простом алгоритмическом языке для последующих модификаций
и создания программ на других языках программирования ( Delphi , C++).
7) Написание на С++ программы функционирования нейронной сети ANFIS для работы в
промышленном цифровом сигнальном процессоре dSpace DS 1102.
8) Испытание симуляционной модели привода в Matlab Simulink.
9) Реальное моделирование нейронного регулятора на испытательном стенде.

2 ОПИСАНИЕ ОБЪЕКТА РЕГУЛИРОВАНИЯ
2.1 Параметры объекта регулирования
Объект управления представляет собой двух массовую электромеханическую систему с
зазором и гибкой связью первой и второй массы.
Первая масса это асинхронный двигатель с векторным управлением. Вторая масса
представляет собой двигатель постоянного тока с независимым возбуждением.
Механическая связь выполнена с использованием стальной пружины, имитирующей
эластичную связь первой и второй масс. Соединительная муфта валов имеет зазор.
Таблица 2.1 - Параметры рабочего двигателя тип: kper 9054M194
Количество
фаз
Cos
Ток , А
треуг/звезда
Мощность
кВт
Обороты,
1/сек
Частота, Гц
3
0.84
4.6/2.65
1.1
1400
50
Таблица 2.2 - Параметры нагрузочной машины тип: Siemens 1HU3058 –OAC 01-Z
Напряжение
В
Момент, Нм
Max/Ном
Ток , А .
Мах/Ном
Мощность
кВт
Обороты,
1/сек
Режим
171
6.5/6
8.8/9.9
1.33
2000
S3 – 40 %
В качестве регулирующего устройства использован цифровой сигнальный процессор
фирмы dSpace тип DS 1102. Он работает в составе управляющего персонального ПК на базе
процессора Pentium 100, и соединяется с ним через ISA шину
Рисунок 2.1. 1 – Внешний вид DS 1102

14
В задачи DSP входит регистрация данных с датчиков скорости и момента а так же
обработка рабочей программы векторного управления АД и формирования сигнала управления
для внешних контуров регулирования.
Рисунок 2.1.2 - Функциональная схема DS 1102.
Программирование DS1102 доступно через компилятор Borland C++ 3.1. Таким образом
можно запрограммировать любой регулятор используя данный язык программирования.
Использование векторного управления позволяет рассматривать нелинейный асинхронный
двигатель с управляемым преобразователем как машину постоянного тока с независимым
возбуждением. При этом мы пренебрегаем переходными процессами в самом асинхронном
двигателе, и погрешностями, вызванными инерцией функционального преобразования координат,
при векторном управлении. Система векторного управления была сделана на испытательном
стенде, поэтому специальные вопросы векторного управления и его расчет в данной работе не
приводится.
Рассчитанные параметры объекта регулирования были взяты из предыдущих работ с
использованием данной установки.
Резонансная частота механической системы.
0
= 8.5 Гц
Механическая постоянная времени двигателя Tm=0.430 c.
Механическая постоянная времени второй массы T
L
=0.17 c.
Электромагнитная постоянная времени двигателя Т
= 0.02с
Постоянная времени демпфера или постоянная времени гибкой связи первой и второй масс
вычисляется из выражения :

15
Lm
LmF
TT
TTT
2
1
0
(2.1)
Эта формула показывает связь резонансной круговой частоты от постоянных времени
электромеханической системы.
Далее получаем :
222
0
2
ML
LM
F
TT
TT
T
(2.2)
В итоге,
F
T
=0.0028 с.
Рисунок 2.1. 3 Принципиальная схема электропривода.
Как видно из рисунка 2.1.3 асинхронный двигатель имеет встроенный контур
регулирования скорости, что необходимо для векторного управления. Разность сигнала задания
скорости и реального сигнала скорости АД используется для формирования сигнала управления
преобразователем частоты и напряжения, питающий приводной двигатель. Выходной вал
двигателя соединяется с гибким эластичным валом (пружиной). Вторая сторона гибкого вала
соединяется через зазор с валом нагрузочной машины – двигателем постоянного тока с
независимым возбуждением, которая используется для создания момента сопротивления в
испытуемом приводе, имитируя приложение момента нагрузки. Питание для нагрузочной машины
формируется с помощью управляемого выпрямителя. Сигнал управления формируется
программой функционирования DSP.
Для измерения реальных значений координат объекта управления в системе есть
аналоговые и цифровые датчики скорости двигателя и второй массы, а так же датчик упругого
момента и датчик измерения зазора.
Параметры цифровой системы:
Минимальный шаг квантования сигнала управления
To=0.0005 cек.
Рабочий шаг квантования To = 0.001 сек., с учетом времени на выполнение рабочей
программы и расчета регулятора.
Диапазон измеряемых напряжений 10 В.
Шаг квантования АЦП 0.0004 сек.
Шаг квантования ЦАП 0.0001 сек.
Квантование датчиков скорости 2500 импульсов на один оборот.

16
Разрядность ЦАП 12 бит
Разрядность АЦП для скорости 16 бит, для моментов 12 бит.
Рисунок 2.1.4 -Функциональная схема механической части электропривода.
Рисунок 2.1.5- Структурная схема механической части объекта регулирования.
На рисунках 2.1.4 и 2.1.5 представлена механическая часть объекта регулирования.
Функции f1(
M
) и f2(
L
) - это функции вязкого трения, ктоторые в общем случае
представляют собой нелинейные функции с падающим участком где функция убывает.
Рисунок 2.1.6- Измерение величины зазора.
Как видно из рисунка 2.1.6. в кинематической системе привода присутствует зазор, размер
которого был измерен с помощью датчиков момента, расположенных по обе стороны зазора.
Искажение прямолинейной идеальной характеристики зазора связано с несовершенством и
погрешностью измерений. Измеренная величина зазора = 2.5°.
На рисунке 2.7 представлена функциональная схема испытательной установки.

17
Сигнал задания скорости soll вырабатывается рабочей программой DSP и подается в
контур регулирования скорости, и момента. Сигнал регулирования сдвига фазы между током и
напряжением , cos, так же генерируется DSP и подается на установку.
Асинхронный двигатель имеет фазный ротор, который питается от независимого источника
энергии через управляемый трехфазный выпрямитель с контуром регулирования ЭДС двигателя.
Рисунок 2.1.7 -Функциональная схема испытательной установки.
Со стороны статора, питание АД осуществляется при помощи управляемого
преобразователя напряжения и частоты. Система управления преобразователем имеет
внутренний контур регулирования тока с ограничением импульсных перегрузок преобразователя.
Сигнал управления от контура регулирования момента задает продольную составляющую
вектора тока Isqsoll, а блок вычисления потока выдает величину поперечной составляющей
вектора тока Isdsoll. Они образуются как проекция вращающегося вектора тока на взаимно
перпендикулярные оси системы координат q- d. Блок преобразователя координат переводит
проекции вектора тока Isqsoll и Isdsoll в трехфазную систему координат, для того чтобы подать
эти сигналы на трех фазный, управляемый преобразователь через контур тока.
Выходные величины токов и напряжений снимаются с помощью аналоговых датчиков
тока и напряжения и попадают в блок вычисления потока и момента. На валу двигателя установлен
тахогенератор, как аналоговый датчик скорости. Значение скорости проходит через модуль АЦП,
в котором кроме вычисления цифрового значения скорости производится интегрирование сигнала
для получения линейного перемещения как интеграла от скорости. Эти данные используются
блоком вычисления потока и момента.
Эластичный вал в виде стальной пружины имитирует собой протяженный жесткий вал, в
котором возникает заметное кручение. На конце гибкого вала установлен цифровой датчик
момента, сигнал которого используется для управления моментом сопротивления нагрузочной
машины постоянного тока, через питание от управляемого выпрямителя напряжения.
Нагрузочная машина так же имеет цифровой и аналоговый датчики скорости и аналоговый
датчик тока, для ограничения возможных импульсных перегрузок питающего преобразователя.
Все регуляторы, ЦАП и АЦП, а так же блоки вычисления момента и потока и
преобразователь координат реализованы в DSP c использованием рабочей программы,
написанной на Borland C++ 3.1, а так же специального программного обеспечения DSP.

18
2.2. Предварительные эксперименты.
Как видно из рисунка 2.2.1 Объект регулирования обладает значительной
колебательностью скорости и момента.
Рисунок 2.2. 1- Графики переходных процессов скоростей первой и второй массы и момента
при пуске и набросе нагрузки.

19
Рисунок 2.2. 2 - Графики переходных процессов скорости мотора
M
, нагрузочной массы
L
, упругого момента M
Ü
и сигнала задания скорости
Soll ,
с применением регулятора состояния.
На рисунке 2.2.2 представлены графики переходных процессов объекта регулирования при
использовании модального регулятора (или регулятора состояния). Из сравнения рисунков 2.2.1 и
2.2.2 видно, что применение регулятора значительно уменьшает колебательность, и значения
упругого момента.

20
Рисунок 2.2. 3 -Графики переходных процессов скорости мотора
M
, нагрузочной массы
L
, упругого момента M
Ü
и сигнала задания скорости
Soll ,
с применением наблюдателя состояния и
регулятора состояния.
Переходные процессы в системе без регулятора, представленные на рисунке 2.2. 2
подтверждают наличие колебаний, обусловленных спецификой характеристики трения, наличием
в системе упругой связи, влиянием зазора..
АКФ первого рода характеризуются чередованием интервалов проскальзывания и
остановок в кинематической паре.
АКФ второго рода вызываются наличием так называемого падающего участка в
характеристике трения, на котором увеличение скорости привода сопровождается снижением
момента сопротивления в трущихся частях механизма.