Davidson K.R., Donsig A.P. Real Analysis with Real Applications
Подождите немного. Документ загружается.


CHAPTER 13
Fourier Series and Physics
Fourier series were first developed to solve partial differential equations that arise
in physical problems, such as heat flow and vibration. We will look at the physics
problem of heat flow to see how Fourier series arise and why they are useful. Then
we will proceed with the solution, which leads to a lot of very interesting mathe-
matics. Then we will see that the problem of a vibrating string leads to a different
PDE that requires similar techniques to solve.
While this problem sounds very applied, the infinite series that arise as solu-
tions forced mathematicians to delve deeply into the foundations of analysis. When
d’Alembert proposed his solution for the motion of a vibrating string in 1754, there
were no clear, precise definitions of limit, function, or even of the real numbers—
all things taken for granted in most calculus courses today. D’Alembert’s solution
(which we shall see at the end of this chapter) has a closed form, and thus did not
really challenge deep principles. However, the solution to the heat problem that
Fourier proposed in 1807 required notions of convergence that mathematicians of
that time did not have. Fourier won a major prize in 1812 for this work, but the
judges, Laplace, Lagrange, and Legendre, criticized Fourier for lack of rigour.
Work in the nineteenth century by many now famous mathematicians eventually
resolved these questions by developing the modern definitions of limit, continuity,
and uniform convergence. These tools were developed not because of some fetish
for finding complicated things, but because they were essential to understanding
Fourier series.
13.1. The Steady-State Heat Equation
The purpose of this section is to derive from physical principles the partial
differential equation satisfied by heat flow on a surface.
Consider the problem of determining the temperature on a thin metal disk given
that the temperature on the boundary circle is fixed. We assume that there is no
heat loss in the third dimension. Perhaps this disk is placed between two insulating
pads. We also assume that the system is at equilibrium. As a consequence, the
423
424 Fourier Series and Physics
temperature at each point remains constant over time. This is known as the steady-
state heat problem.
It is convenient to work in polar coordinates in order to exploit the symmetry.
The disk will be given as the set
D = {(x, y) : x
2
+ y
2
≤ 1} = {(r, θ) : 0 ≤ r ≤ 1, −π ≤ θ ≤ π},
where (0, θ) represents the origin for all values of θ; and (r, −π) = (r, π) for
all r ≥ 0. More generally, we allow (r, θ) for any real value of θ and make the
identification (r, θ + 2π) = (r, θ).
Let us denote the temperature distribution over the disk by a function u(r, θ),
and let the given function on the boundary circle be f(θ).
As usual in physical problems such as this, we need to know a mathematical
form of the appropriate physical law in order to determine a differential equation
that governs the behaviour of the system. In this case, the law is that the heat flow
across a boundary is proportional to the temperature difference between the two
sides of the curve. Of course, our temperature distribution function will be contin-
uous. So we must deal with the infinitesimal version of temperature change, which
is the derivative of the temperature in the direction perpendicular to the boundary,
known as the normal derivative.
With this assumption, we can write down a mathematical version of the fact
that given any region R in the disk with piecewise smooth boundary C, the total
amount of heat crossing the boundary C must be 0. This yields the heat conservation
equation
0 =
Z
C
∂u
∂n
ds.
Here ∂u/∂n denotes the normal derivative in the outward direction perpendicular
to the tangent, and ds indicates integration over arc length along the curve.
Those students comfortable with multivariable calculus will recognize a ver-
sion of the Divergence Theorem:
Z
C
∂u
∂n
ds =
Z
R
∆u dA,
where ∆u = u
xx
+u
yy
is the Laplacian and dA represents integration with respect
to area. Whenever a continuous function integrates to 0 over every nice region
(say squares or disks), then the function must be 0 everywhere, which leads to
the equation ∆u = 0. This is the desired differential equation, except that it is
necessary to express the Laplacian in polar coordinates. A (routine but nontrivial)
exercise using the multivariate chain rule shows that
∆u = u
rr
+
1
r
u
r
+
1
r
2
u
θθ
.
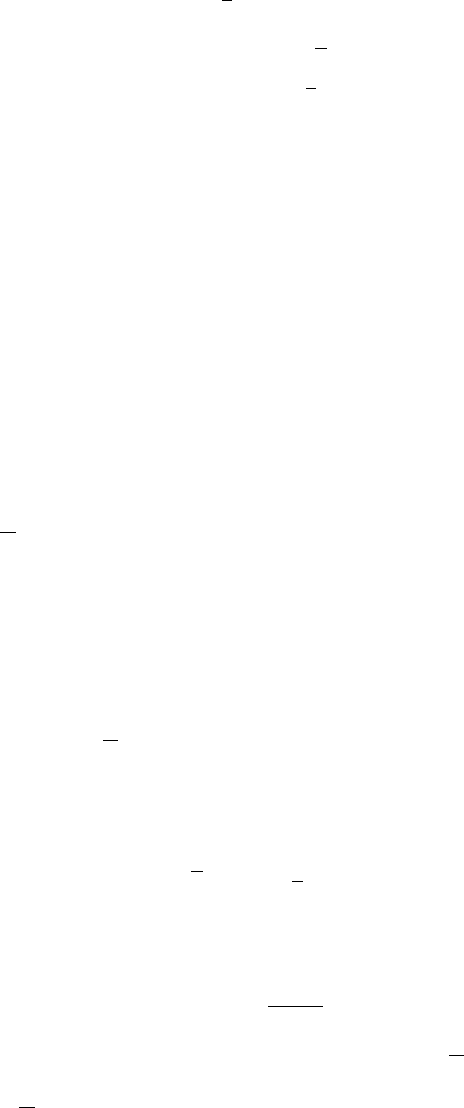
For the convenience of students unfamiliar with ideas in the previous para-
graph, we show how to derive this equation directly. This has the advantage that
we can work in polar coordinates and avoid the need for a messy change of vari-
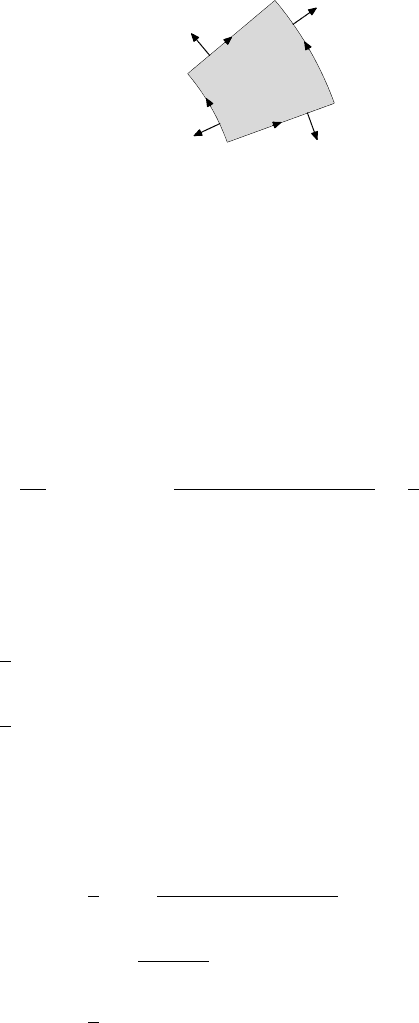
ables. The idea is to take R to be the region graphed in Figure 13.1, namely
R = {(r, θ) : r
0
≤ r ≤ r
1
, θ
0
≤ θ ≤ θ
1
}.
13.1 The Steady-State Heat Equation 425
Then we will divide the integral by (θ
1
− θ
0
)(r
1
− r
0
) and take the limit as θ
1
decreases to θ
0
and r
1
decreases to r
0
, which we evaluate using the Fundamental
Theorem of Calculus. This will yield the same result.
L
0
L
1
A
0
A
1
FIGURE 13.1. The region R with boundary and outward normal vectors.
The boundary C of R consists of two radial line segments
L
0
= {(r, θ
0
) : r
0
≤ r ≤ r
1
} and L
1
= {(r, θ
1
) : r
0
≤ r ≤ r
1
}
and two arcs
A
0
= {(r
0
, θ) : θ
0
≤ θ ≤ θ
1
} and A
1
= {(r
1
, θ) : θ
0
≤ θ ≤ θ
1
}.
Taking orientation into account, C = L
0
+ A
1
− L
1
− A
0
. Along L
1
, the outward
normal at (r, θ
1
) is in the θ direction, and arc length along the circle with angle h
is rh, thus
∂u
∂n
(r, θ
1
) = lim
h→0
u(r, θ
1
+ h) − u(r, θ
1
)
rh
=
1
r
u
θ
(r, θ
1
).
Along the arc A
1
, the outward normal is the radial direction, and thus the normal
derivative is u
r
(r
1
, θ). The arc length ds along the radii L
0
and L
1
is just dr, while
arc length along an arc of radius r is r dθ. Thus by adding over the four pieces of
the boundary, we obtain the conservation law
0 =
Z
r
1
r
0
1
r
¡
u
θ
(r, θ
1
) − u
θ
(r, θ
0
)
¢
dr +
Z
θ
1
θ
0
u
r
(r
1
, θ)r
1
dθ −
Z
θ
1
θ
0
u
r
(r
0
, θ)r
0
dθ
=
Z
r
1
r
0
1
r
¡
u
θ
(r, θ
1
) − u
θ
(r, θ
0
)
¢
dr +
Z
θ
1
θ
0
¡
r
1
u
r
(r
1
, θ) − r
0
u
r
(r
0
, θ)
¢
dθ.
Divide by θ
1
− θ
0
and take the limit as θ
1
decreases to θ
0
. The first term
is integrated with respect to r, which is independent of θ, and thus the limit is
evaluated using the Leibniz Rule (8.3.4). For the second term, the limit follows
from the Fundamental Theorem of Calculus.
0 =
Z
r
1
r
0
1
r
lim
θ
1
→θ
0
u
θ
(r, θ
1
) − u
θ
(r, θ
0
)
θ
1
− θ
0
dr
+ lim
θ
1
→θ
0
1
θ
1
− θ
0
Z
θ
1
θ
0
¡
r
1
u
r
(r
1
, θ) − r
0
u
r
(r
0
, θ)
¢
dθ
=
Z
r
1
r
0
1
r
u
θθ
(r, θ
0
) dr + r
1
u
r
(r
1
, θ
0
) − r
0
u
r
(r
0
, θ
0
)

426 Fourier Series and Physics
Now divide by r
1
− r
0
and take the limit as r
1
decreases to r
0
. We obtain
0 = lim
r
1
→r
0
1
r
1
− r
0
Z
r
1
r
0
1
r
u
θθ
(r, θ
0
) dr +
r
1
u
r
(r
1
, θ
0
) − r
0
u
r
(r
0
, θ
0
)
r
1
− r
0
=
1
r
0
u
θθ
(r
0
, θ
0
) +
∂
∂r
(ru
r
)(r
0
, θ
0
)
=
1
r
0
u
θθ
(r
0
, θ
0
) + u
r
(r
0
, θ
0
) + r
0
u
rr
(r
0
, θ
0
)
= r
0
∆u(r
0
, θ
0
).
Thus our differential equation with boundary conditions becomes
∆u := u
rr
+
1
r
u
r
+
1
r
2
u
θθ
= 0 for 0 ≤ r < 1, −π ≤ θ ≤ π
u(1, θ) = f (θ) for − π ≤ θ ≤ π.
Exercises for Section 13.1
A. Do the change of variables calculation converting u
xx
+ u
yy
to polar coordinates.
B. Let u(r, θ) = log r. Compute ∆u and u(1, θ). Explain why u is not a solution of the
heat equation for the boundary function f(θ) = 0.
C. Suppose that u is a solution of the steady-state heat equation for the annulus A =
{(r, θ) : r
0
≤ r ≤ r
1
}.
(a) If u depends only on r, and not on θ, what ODE does u satisfy? Solve the heat
equation for the boundary conditions u(r
0
, θ) = a
0
and u(r
1
, θ) = a
1
.
(b) Show that if u depends only on θ, then it is constant.
D. Show that u(r, θ) = (3−4r
2
+r
4
)+(8r
2
−8r
4
) sin
2
θ+8r
4
sin
4
θ satisfies ∆u(r, θ) = 0
and u(1, θ) = 8sin
4
θ.
E. Let S = {(x, y) : 0 ≤ x ≤ 1, y ∈ R} and consider the steady-state heat problem on
this strip.
(a) Show that e
nπy
sinnπx is a solution for the problem of zero boundary values.
(b) Do you believe that this is a reasonable solution to the physical problem? Discuss.
F. Suppose that an infinite rod has a temperature distribution u(x, t) at the point x ∈ R
at time t > 0. The heat equation is u
t
= u
xx
.
(a) Prove that u(x, t) =
1
√
4πt
e
−x
2
/4t
is a solution.
(b) Evaluate the total heat at time t:
Z
∞
−∞
u(x, t) dx.
HINT: Let I =
Z
∞
−∞
e
−x
2
/2
dx. Express I
2
as a double integral over the plane, and
convert to polar coordinates. Or use Example 8.3.5.
(c) Evaluate lim
t→0
u(x, t). Can you give a physical explanation of what this limit repre-
sents?
13.2 Formal Solution 427
13.2. Formal Solution
The steady-state heat equation is a difficult problem to solve. We approach it
first by making the completely unjustified assumption that there will be solutions
of a special form. Then we combine the solutions we find to obtain a quite general
solution in which all considerations of convergence are ignored. After that, we
will work backward and show rigorously that these solutions in fact make good
sense and are completely general. So we justify our first steps as experiments that
lead us to a likely candidate for the solution but do not in themselves constitute a
proper derivation of the solution. In subsequent sections, we will use our analysis
techniques to justify why it works.
Our method, called separation of variables, is to look for solutions of the form
u(r, θ) = R(r)Θ(θ), where R is a function only of r and Θ is a function only of θ.
The reason for doing this is that it enables us to split the partial differential equation
into two ordinary differential equations of a single variable each. Indeed, the DE
∆u = 0 becomes
R
00
(r)Θ(θ) +
1
r
R
0
(r)Θ(θ) +
1
r
2
R(r)Θ
00
(θ) = 0.
Manipulate this by taking all dependence on r to one side of the equation and all
dependence on θ to the other to obtain
r
2
R
00
(r) + rR
0
(r)
R(r)
=
−Θ
00
(θ)
Θ(θ)
.
The left-hand side does not depend on θ and the right-hand side does not depend
on r. As they are equal, they are both independent of all variables and hence are
equal to a constant c.
r
2
R
00
(r) + rR
0
(r)
R(r)
= c =
−Θ
00
(θ)
Θ(θ)
These equations can now be rewritten as
Θ
00
(θ) + cΘ(θ) = 0
and
r
2
R
00
(r) + rR
0
(r) − cR(r) = 0.
The first equation is a well-known linear DE with constant coefficients. We
know from Section 12.6 that this DE has a two-parameter space of solutions corre-
sponding to the possible initial values. We can solve the equation (D
2
+ cI)y = 0
making use of the quadratic equation x
2
+ c = 0, which has roots ±
√
−c if c < 0,
a double root at 0 for c = 0 and two imaginary roots ±
√
ci when c > 0. Hence by
Exercise 12.6.B, we obtain the solutions
Θ(θ) = A cos(
√
c θ) + B sin(
√
c θ) for c > 0
Θ(θ) = A + Bθ for c = 0
Θ(θ) = Ae
√
−c θ
+ Be
−
√
−c θ
for c < 0.
428 Fourier Series and Physics
However, not all of these solutions fit our problem. Our solutions must be 2π-
periodic because (r, −π) and (r, π) represent the same point; and more generally
(r, θ) and (r, θ + 2π) represent the same point. Hence
Θ(−π) = Θ(π) and Θ
0
(−π) = Θ
0
(π).
This eliminates the case c < 0 and limits the c = 0 case to the constant functions.
For c > 0, this forces
√
c to be an integer. Hence we obtain
Θ(θ) = A cos nθ + B sinnθ for c = n
2
≥ 1
Θ(θ) = A for c = 0.
Now for each c = n
2
, n ≥ 0, we must solve the equation
r
2
R
00
(r) + rR
0
(r) − n
2
R(r) = 0.
This is not as easy to solve, but a trick, the substitution r = e
t
, leads to the answer.
Differentiation yields
dR
dt
=
dR
dr
dr
dt
= R
0
r
and
d
2
R
dt
2
=
d
dr
(R
0
r)
dr
dt
= (R
00
r + R
0
)r = r
2
R
00
+ rR
0
.
Hence our DE becomes
d
2
R
dt
2
= n
2
R. This is a linear DE with constant coefficients,
which has the solutions
R = ae
nt
+ be
−nt
= ar
n
+ br
−n
for n ≥ 1
R = a + bt = a + b logr for n = 0.
Again physical considerations demand that R be continuous at r = 0. This elim-
inates the solutions r
−n
and logr. That leaves the solutions R(r) = ar
n
for each
n ≥ 0.
Combining these two solutions for each c = n
2
provides the solutions
u(r, θ) = A
n
r
n
cosnθ + B
n
r
n
sinnθ for n ≥ 0.
Of course, the case n = 0 is special and yields u(r, θ) = A
0
. Since the sum of
solutions for a homogeneous DE such as ours will also be a solution, we obtain a
formal solution (ignoring convergence issues)
u(r, θ) = A
0
+
∞
X
n=1
A
n
r
n
cosnθ + B
n
r
n
sinnθ.
Continuing to ignore the question of the convergence, we let r = 1 and use our
boundary condition to obtain
f(θ) = A
0
+
∞
X
n=1
A
n
cosnθ + B
n
sinnθ.
Such a series is called a Fourier series, which we have discussed in Section 7.4.

13.3 Orthogonality Relations 429
Exercises for Section 13.2
A. (a) Verify that ∆u = 0 = ∆v implies that ∆(au + bv) = 0 for all scalars a, b ∈ R.
(b) Solve the DE y
0
= −y
2
. Show that the sum of any two solutions can never be a
solution.
(c) Explain the difference in these two situations.
B. Adapt the method of this section (i.e., separation of variables) to find the possible
solutions of ∆u(r, θ) = 0 on the region U = {(r, θ) : r > 1} that are continuous on
U
and are continuous at infinity in the sense that lim
r→∞
u(r, θ) = L exists, independent
of θ.
C. Let HS = {(x, y) : 0 ≤ x ≤ 1, y ≥ 0}, and consider the steady-state heat problem
on HS with boundary conditions u(0, y) = u(1, y) = 0 and u(x, 0) = x − x
2
.
(a) Use separation of variables to obtain a family of basic solutions.
(b) Show that the conditions on the two infinite bounding lines restricts the possible
solutions. If in addition, you stipulate that the solution must be bounded, express
the resulting solution as a formal series.
(c) What does the boundary condition on [0, 1] become for this formal series?
D. Consider a circular drum membrane of radius 1. At time t, the point (r, θ) on the
surface has a vertical deviation of u(r, θ, t). The wave equation for the motion is
u
tt
= c
2
∆u, where c is a constant. In this exercise, we will only consider solutions
that have radial symmetry (no dependence on θ).
(a) What boundary condition should apply to u(1, θ, t)?
(b) Look for solutions to the PDE of the form u(r, θ, t) = R(r)T (t). Use separation of
variables to obtain ODEs for R and T . An unknown constant must be introduced.
(c) What conditions on the ODE for T are needed to guarantee that T remains bounded
(a reasonable physical hypothesis)?
(d) The DE for R is called Bessel’s DE. What degeneracy of the DE requires us to add
another condition that R remain bounded at r = 0?
13.3. Orthogonality Relations
The next step in our heuristic development is to determine the coefficients A
n
and B
n
in the Fourier series given in the last section. To do this, we use the natural
inner product on C[−π, π] given by
hf, gi =
1
2π
Z
π
−π
f(θ)g(θ) dθ.
In Section 7.4, we showed that the functions {1,
√
2cosnθ,
√
2sinnθ : n ≥ 1}
form an orthonormal set in C[−π, π] with this inner product.
Moreover, we used the orthogonality relations to show that for a trigonometric
polynomial p(θ) = A
0
+
n
P
k=1
A
k
coskθ + B
k
sinkθ, we can recover all of the
coefficients from the inner products A
0
= hp, 1i, A
k
= hp, 2 cos kθi and B
k
=
hp, 2sinkθi for k ≥ 1. This was the motivation for defining Fourier series of

430 Fourier Series and Physics
f ∈ C[−π, π] to be
f ∼ A
0
+
∞
X
k=1
A
k
coskθ + B
k
sinkθ,
where A
0
= hf, 1i =
1
2π
Z
π
−π
f(t) dt, A
k
= hf, 2 cos kθi =
1
π
Z
π
−π
f(t) coskt dt
and B
k
= hf, 2 sin kθi =
1
π
Z
π
−π
f(t) sinkt dt for k ≥ 1.
We have said nothing yet about the convergence of this series. There are serious
difficulties that need to be addressed. We also note that this definition makes sense
when f is not continuous provided that f is Riemann integrable. Since f must be
bounded,
kfk
1
:=
1
2π
Z
π
−π
|f(θ)|dθ < ∞.
Such functions are called absolutely integrable functions. In particular, Fourier
series of piecewise continuous functions are defined. We will need the following
easy estimate.
13.3.1. LEMMA. If f is absolutely integrable on [−π, π], then
|A
0
| ≤ kf k
1
, |A
n
| ≤ 2kf k
1
and |B
n
| ≤ 2kf k
1
for n ≥ 1.
Since kfk
1
≤ kfk
∞
, it follows that if f ∈ C[−π, π], then its Fourier coefficients
are bounded.
PROOF. This is routine. For example,
|B
n
| ≤
1
π
Z
π
−π
|f(θ) sinnθ|dθ ≤
1
π
Z
π
−π
|f(θ)|dθ = 2kf k
1
.
Moreover, it is evident that if f is bounded,
kfk
1
=
1
2π
Z
π
−π
|f(θ)|dθ ≤
1
2π
Z
π
−π
kfk
∞
dθ = kfk
∞
.
So continuous functions are absolutely integrable, and thus the Fourier coefficients
are bounded by 2kfk
∞
. ¥
13.3.2. EXAMPLE. Consider the Fourier series of the function f(θ) = |θ| for
−π ≤ θ ≤ π. First note that f is even, so that f(θ) sinnθ is an odd function for all
n ≥ 1. Hence B
n
= 0 for all n ≥ 1 (Exercise 13.3.G). For A
n
we compute
A
0
=
1
2π
Z
π
−π
|t|dt =
1
π
Z
π
0
t dt =
π
2
,

13.3 Orthogonality Relations 431
and, using integration by parts,
A
n
=
1
π
Z
π
−π
|t|cosnt dt =
2
π
Z
π
0
t cosnt dt
=
2t
π
sinnt
n
¯
¯
¯
¯
π
0
−
2
π
Z
π
0
1
sinnt
n
dt = 0 +
2cosnt
πn
2
¯
¯
¯
¯
π
0
=
2
πn
2
¡
(−1)
n
− 1
¢
=
0 if n is even
−
4
πn
2
if n is odd.
Thus the Fourier series is
|θ| ∼
π
2
−
4
π
∞
X
k=0
cos(2k + 1)θ
(2k + 1)
2
.
Exercises for Section 13.3
A. Find the Fourier series of the following functions:
(a) f(θ) = cos
3
(θ)
(b) f(θ) = |sinθ|
(c) f(θ) = θ for −π ≤ θ ≤ π
B. Find the Fourier expansion for the function u(r, θ) of Exercise 13.1.D with boundary
function f(θ) = sin
4
θ.
C. Verify the remaining parts of Lemma 7.4.5.
D. (a) Suppose that f(θ) is a 2π-periodic function with known Fourier series. Let α be a
real number, and let g(θ) = f(θ − α) for θ ∈ R. Find the Fourier series of g.
(b) Combine part (a) with Exercise A(b) to find the Fourier series of |cosθ|.
E. (a) Let f(θ) be a 2π-periodic function with a given Fourier series. Let g(θ) = f (−θ)
for θ ∈ R. Find the Fourier series of g.
(b) Suppose that h is a 2π-periodic function such that h(π − θ) = h(θ). What does
this imply about its Fourier series?
F. (a) Compute the Fourier series of f(θ) =
(
1 − |θ| for − 1 ≤ θ ≤ 1
0 otherwise
.
(b) Compute the Fourier series of g(θ) =
1 for − 1 ≤ θ ≤ 0
−1 for 0 < θ ≤ 1
0 otherwise
.
(c) What relationship do you see between these two functions and series?
G. Show that if f ∈ C[−π, π] is an odd function, then the Fourier series of f involves
only functions of the form sinkθ. Similarly, if f ∈ C[−π, π] is an even function, then
the Fourier series of f involves only the constant term and the cosine functions.
H. For f ∈ C[−π, π], define f
e
(θ) =
1
2
¡
f(θ) + f (−θ)
¢
and f
o
(θ) =
1
2
¡
f(θ) − f (−θ)
¢
.
Compute the Fourier series of f
e
and f
o
in terms of the series for f.
432 Fourier Series and Physics
I. Show that f
0
(θ) = 1 and f
n
(θ) =
√
2cos nθ on 0 ≤ θ ≤ π for n ≥ 1 is an orthonor-
mal set in C[0, π] for the inner product hf, gi =
1
π
Z
π
0
f(θ)g(θ) dθ.
J. (a) Find an inner product on C[0, 1] so that {
√
2sin nπx : n ≥ 1} is an orthonormal
set, and verify that this set is orthonormal for your choice of inner product.
(b) In Exercise 13.2.C, find the coefficients necessary to satisfy the boundary condition
on the unit interval.
13.4. Convergence in the Open Disk
It is now time to return to the original problem and systematically analyze our
proposed solutions. The behaviour of the function u on the open disk
D = {(r, θ) : 0 ≤ r < 1, −π ≤ θ ≤ π}
is much easier than the analysis of the boundary behaviour. We deal with that first,
and we will find that it leads to a method for understanding the Fourier series of f.
Often results about the behaviour of u on D will follow from a stronger result on
each smaller closed disk
D
R
= {(r, θ) : 0 ≤ r ≤ R, −π ≤ θ ≤ π} for R < 1.
13.4.1. PROPOSITION. Let f be an absolutely integrable function on [−π, π]
with Fourier series f ∼ A
0
+
P
∞
n=1
A
n
cosnθ + B
n
sinnθ. Then the series
A
0
+
∞
X
n=1
A
n
r
n
cosnθ + B
n
r
n
sinnθ
converges uniformly on
D
R
for any R < 1 and thus converges everywhere on the
open disk D to a continuous function u(r, θ).
PROOF. This follows from the Weierstrass M-test (8.4.7). Indeed,
°
°
A
n
r
n
cosnθ + B
n
r
n
sinnθ
°
°
D
R
= max
(r,θ)∈
D
R
¯
¯
A
n
r
n
cosnθ + B
n
r
n
sinnθ
¯
¯
≤ (|A
n
| + |B
n
|)R
n
≤ 4kf k
1
R
n
.
Since
∞
X
n=0
4kfk
1
R
n
=
4kfk
1
1 − R
< ∞,
the M-test guarantees that the series converges uniformly on D
R
. The uniform
limit of continuous functions is continuous by Theorem 8.2.1. Therefore, u(r, θ) is
continuous on D
R
. Since this is true for each R < 1, u is continuous on the whole
open disk D. ¥