Cohen I.M., Kundu P.K. Fluid Mechanics
Подождите немного. Документ загружается.

This page intentionally left blank

Chapter 3
Kinematics
1. Introduction ..................... 53
2. Lagrangian and Eulerian
Specifications .................... 54
3. Eulerian and Lagrangian Descriptions:
The Particle Derivative ........... 55
4. Streamline, Path Line, and Streak
Line ............................. 57
5. Reference Frame and Streamline
Pattern .......................... 59
6. Linear Strain Rate ............... 60
7. Shear Strain Rate................ 61
8. Vorticity and Circulation ......... 62
9. Relative Motion near a Point:
Principal Axes ................... 64
10. Kinematic Considerations of
Parallel Shear Flows............ 67
11. Kinematic Considerations of Vortex
Flows .......................... 68
Solid-Body Rotation ............ 68
Irrotational Vortex .............. 70
Rankine Vortex ................. 71
12. One-, Two-, and Three-Dimensional
Flows .......................... 71
13. The Streamfunction ............. 73
14. Polar Coordinates .............. 75
Exercises ....................... 77
Supplemental Reading .......... 79
1. Introduction
Kinematics is the branch of mechanics that deals with quantities involving space and
time only. It treats variables such as displacement, velocity, acceleration, deformation,
and rotation of fluid elements without referring to the forces responsible for such a
motion. Kinematics therefore essentially describes the “appearance” of a motion.
Some important kinematical concepts are described in this chapter. The forces are
considered when one deals with the dynamics of the motion, which will be discussed
in later chapters.
A few remarks should be made about the notation used in this chapter and
throughout the rest of the book. The convention followed in Chapter 2, namely,
that vectors are denoted by lowercase letters and higher-order tensors are denoted
by uppercase letters, is no longer followed. Henceforth, the number of subscripts
will specify the order of a tensor. The Cartesian coordinate directions are denoted
by (x, y, z), and the corresponding velocity components are denoted by (u, v, w).
When using tensor expressions, the Cartesian directions are denoted alternatively
53
©2010 Elsevier Inc. All rights reserved.
DOI: 10.1016/B978-0-12-381399-2.50003-4
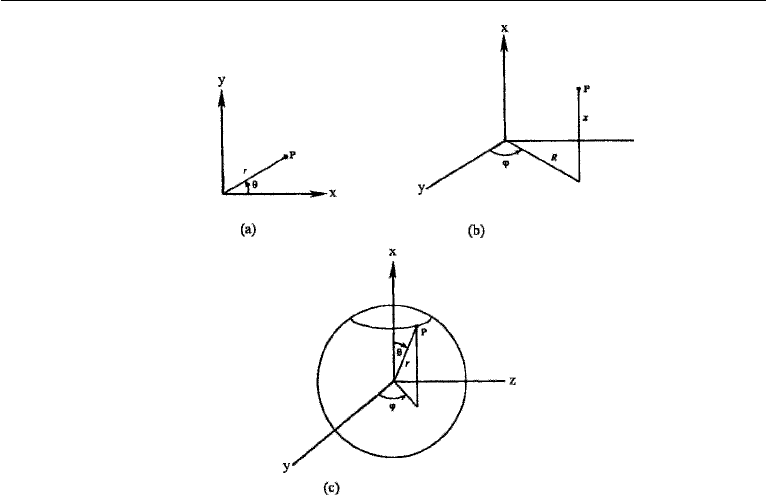
54 Kinematics
z
Figure 3.1 Plane, cylindrical, and spherical polar coordinates: (a) plane polar; (b) cylindrical polar;
(c) spherical polar coordinates.
by (x
1
,x
2
,x
3
), with the corresponding velocity components (u
1
,u
2
,u
3
). Plane
polar coordinates are denoted by (r, θ), with u
r
and u
θ
the corresponding velocity
components (Figure 3.1a). Cylindrical polar coordinates are denoted by (R,ϕ,x),
with (u
R
,u
ϕ
,u
x
) the corresponding velocity components (Figure 3.1b). Spheri-
cal polar coordinates are denoted by (r,θ,ϕ), with (u
r
,u
θ
,u
ϕ
) the corresponding
velocity components (Figure 3.1c). The method of conversion from Cartesian to
plane polar coordinates is illustrated in Section 14 of this chapter.
2. Lagrangian and Eulerian Specifications
There are two ways of describing a fluid motion. In the Lagrangian description, one
essentially follows the history of individual fluid particles (Figure 3.2). Consequently,
the two independent variables are taken as time and a label for fluid particles. The label
can conveniently be taken as the position vector a of the particle at some reference time
t = 0. In this description, any flow variable F is expressed as F(a,t). In particular,
the position vector is written as r = r(a,t), which represents the location at t of a
particle whose position was a at t = 0.
In the Eulerian description, one concentrates on what happens at a spatial point
r
, so that the independent variables are taken as r
and t
. (Here the primes are meant
to distinguish Lagrangian dependent variables from Eulerian independent variables.)
Flow variables are written, for example, as F(r
,t
).
3. Eulerian and Lagrangian Descriptions: The Particle Derivative 55
x
y
z
r (0) 5 a
r (t)
u
particle
path
Figure 3.2 Particle—Lagrangian description. Independent variables: (a,t); dependent variables: r(a,t),
u = (∂r/∂t)
a
, ρ = ρ(a,t), and so on.
The velocity and acceleration of a fluid particle in the Lagrangian description are
simply the partial time derivatives
u = ∂r/∂t, acceleration a = ∂u/∂t = ∂
2
r/∂t
2
(3.1)
as the particle identity is kept constant during the differentiation. In the Eulerian
description, however, the partial derivative ∂/∂t
gives only the local rate of change
at a point r
and is not the total rate of change as seen by the fluid particle. Additional
terms are needed to form derivatives following a particle in the Eulerian description,
as explained in the next section.
The Eulerian specification is used in most problems of fluid flows. The
Lagrangian description is used occasionally when we are interested in finding particle
paths of fixed identity; examples can be found in Chapters 7 and 13.
3. Eulerian and Lagrangian Descriptions: The Particle
Derivative
Classical mechanics has two alternative descriptions: the field description (Eulerian)
and the particle description (Lagrangian), associated with two of the great European
mathematical physicists of the eighteenth century [Leonhard Euler (1707–1783) and
Joseph Louis, Comte de Lagrange (1736–1813)]. Most of this book is written in
the field description (Figure 3.3) but it is frequently very useful to express a parti-
cle derivative in the field description. Thus we wish to compare and relate the two
descriptions.
Consider any fluid property F(r
,t
) = F(a,t) at the same position and time
in the two descriptions. F may be a scalar, vector, or tensor property. We seek to
express (∂F /∂t)
a
, which is the rate of change of F as seen by an observer on the
fixed particle labeled by coordinate a = r(0) at t = 0, in field variables. That is,
56 Kinematics
z9
(x9, y9, z9, t9)
y9
x9
r
u
Figure 3.3 Field—Eulerian description. Independent variables: (x
,y
,z
,t
); dependent variables:
u(r
,t
), ρ(r
,t), and so on.
we ask what combination of r
,t
field derivatives corresponds to (∂F /∂t)
a
?Wedo
our calculation at r
= r and t
= t so we are at the same point and time in the two
descriptions. Thus
F(a,t) = F [r(a, t), t]=F(r
,t
). (3.2)
Differentiating, taking care to differentiate dependent variables with respect to inde-
pendent variables, and using the chain rule,
[∂F(a, t)/∂t]
a
= (∂F /∂t
)
r
(∂t
/∂t ) + (∂F /∂r
)
t
•
(∂r
/∂r)
•
(∂r/∂t)
a
. (3.3)
Now ∂t
/∂t is simply the ratio of time scales used in the two descriptions. We take this
equal to 1 by measuring the time in the same units (say seconds). Here ∂r
/∂r is the
transformation matrix between the two coordinate systems. If r
and r are not rotated or
stretched with respect to each other, but with parallel axes and with lengths measured
in the same units (say meters), then ∂r
/∂r = I, the unit matrix, with elements δ
ij
.
Since (∂r/∂t)
a
= u, we have the result
(∂F /∂t)
a
= ∂F /∂t
+ (∇
F)
•
u ≡ DF/Dt. (3.4)
The total rate of change D/Dt is generally called the material derivative (also called
the substantial derivative,orparticle derivative) to emphasize the fact that the deriva-
tive is taken following a fluid element. It is made of two parts: ∂F /∂t is the local
rate of change of F at a given point, and is zero for steady flows. The second part
u
i
∂F /∂x
i
is called the advective derivative, because it is the change in F as a result
of advection of the particle from one location to another where the value of F is dif-
ferent. (In this book, the movement of fluid from place to place is called “advection.”
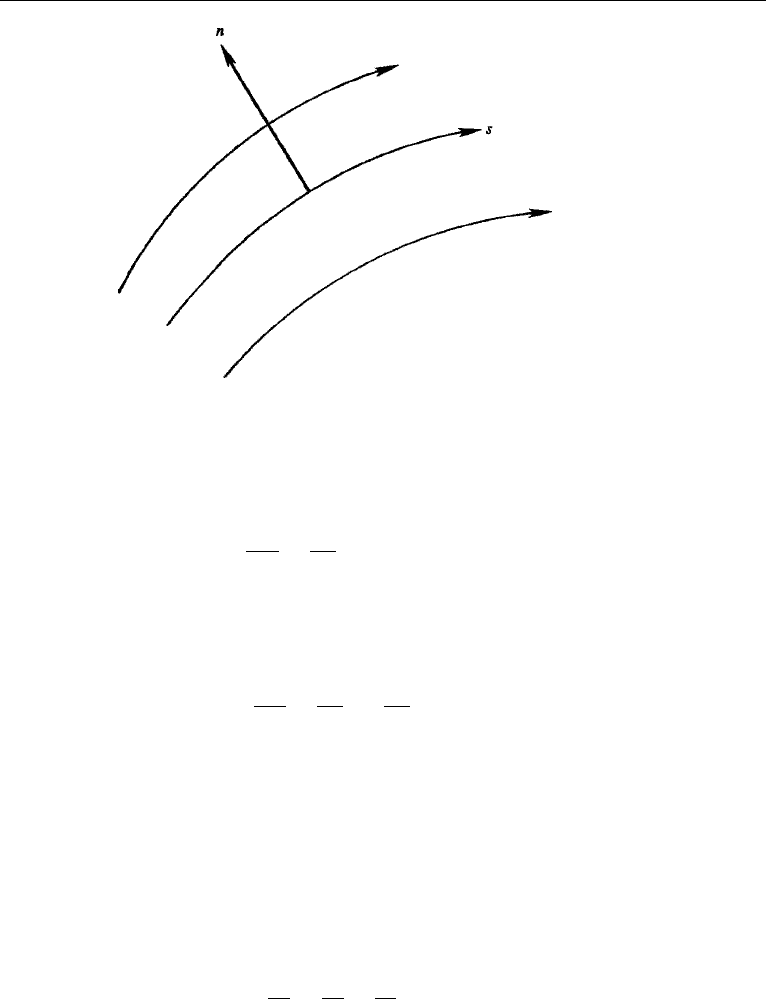
4. Streamline, Path Line, and Streak Line 57
Figure 3.4 Streamline coordinates (s, n).
Engineering texts generally call it “convection.” However, we shall reserve the term
convection to describe heat transport by fluid movements.)
In vector notation, equation (3.4) is written as
DF
Dt
=
∂F
∂t
+ u
•
∇F. (3.5)
The scalar product u
•
∇F is the magnitude of u times the component of ∇F in the
direction of u. It is customary to denote the magnitude of the velocity vector u by q.
Equation (3.5) can then be written in scalar notation as
DF
Dt
=
∂F
∂t
+ q
∂F
∂s
, (3.6)
where the “streamline coordinate” s points along the local direction of u (Figure 3.4).
4. Streamline, Path Line, and Streak Line
At an instant of time, there is at every point a velocity vector with a definite direction.
The instantaneous curves that are everywhere tangent to the direction field are called
the streamlines of flow. For unsteady flows the streamline pattern changes with time.
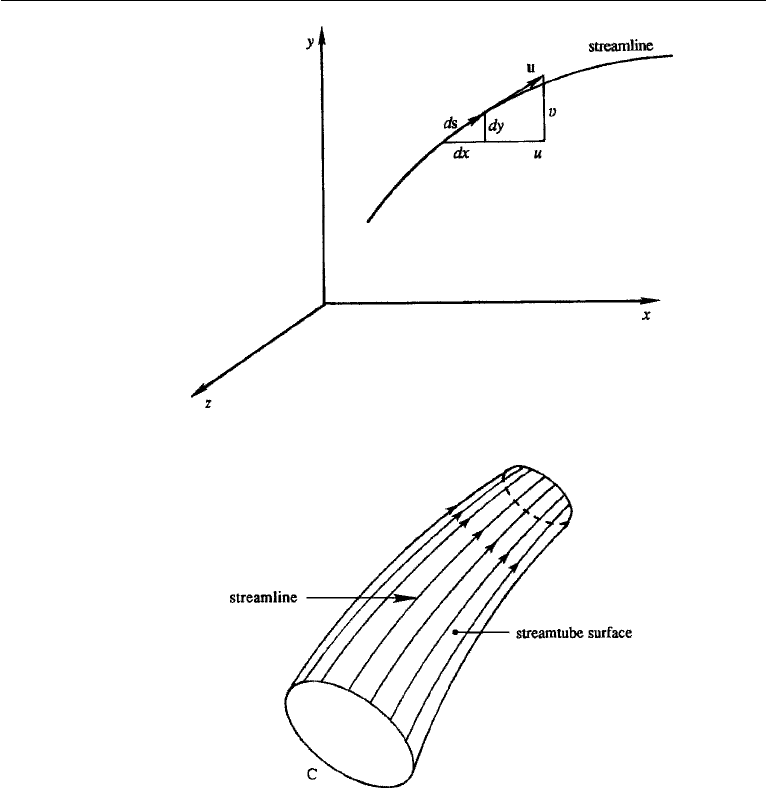
Let ds = (dx, dy, dz) be an element of arc length along a streamline (Figure 3.5),
and let u = (u, v, w) be the local velocity vector. Then by definition
dx
u
=
dy
v
=
dz
w
, (3.7)
along a streamline. If the velocity components are known as a function of time, then
equation (3.7) can be integrated to find the equation of the streamline. It is easy to
show that equation (3.7) corresponds to u ×ds = 0. All streamlines passing through
58 Kinematics
Figure 3.5 Streamline.
Figure 3.6 Streamtube.
any closed curve C at some time form a tube, which is called a streamtube (Figure 3.6).
No fluid can cross the streamtube because the velocity vector is tangent to this surface.
In experimental fluid mechanics, the concept of path line is important. The path
line is the trajectory of a fluid particle of fixed identity over a period of time. The
path line or particle path is represented as in Section 2 by r = r(a,t) where a is
the location of the particle at the reference time, say t = 0. Then u = ∂r/∂t for
fixed particle. Assuming a nonzero Jacobian determinant, we may invert to obtain
the reference particle location at t = 0, a = a(r,t). Path lines and streamlines are
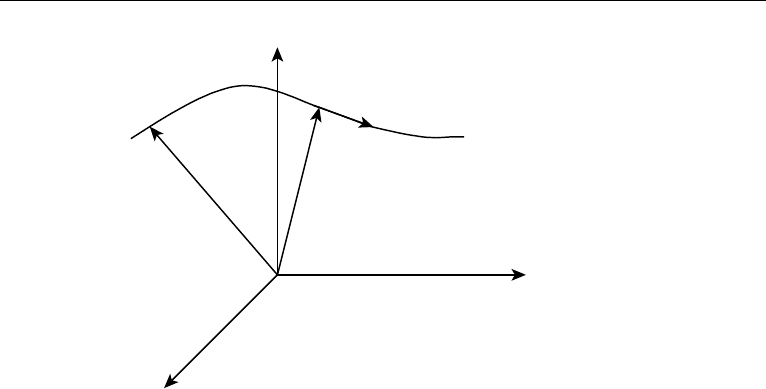
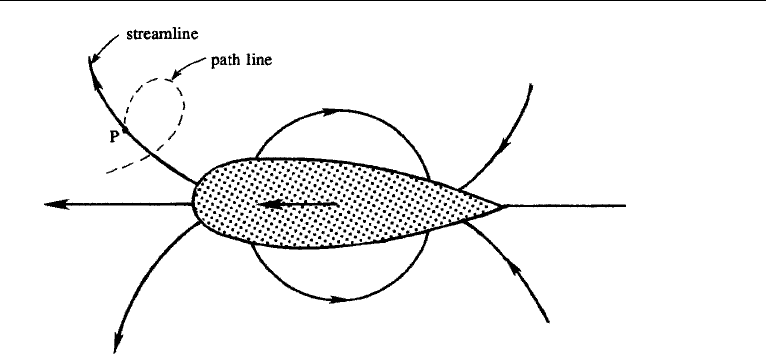
identical in a steady flow, but not in an unsteady flow. Consider the flow around a
body moving from right to left in a fluid that is stationary at an infinite distance from
the body (Figure 3.7). The flow pattern observed by a stationary observer (that is,
5. Reference Frame and Streamline Pattern 59
Figure 3.7 Several streamlines and a path line due to a moving body.
an observer stationary with respect to the undisturbed fluid) changes with time, so
that to the observer this is an unsteady flow. The streamlines in front of and behind
the body are essentially directed forward as the body pushes forward, and those
on the two sides are directed laterally. The path line (shown dashed in Figure 3.7)
of the particle that is now at point P therefore loops outward and forward again as the
body passes by.
The streamlines and path lines of Figure 3.7 can be visualized in an experiment
by suspending aluminum or other reflecting materials on the fluid surface, illuminated
by a source of light. Suppose that the entire fluid is covered with such particles, and a
brief time exposure is made. The photograph then shows short dashes, which indicate
the instantaneous directions of particle movement. Smooth curves drawn through
these dashes constitute the instantaneous streamlines. Now suppose that only a few
particles are introduced, and that they are photographed with the shutter open for a
long time. Then the photograph shows the paths of a few individual particles, that is,
their path lines.
A streak line is another concept in flow visualization experiments. It is defined as
the current location of all fluid particles that have passed through a fixed spatial point
at a succession of previous times. It is determined by injecting dye or smoke at a fixed
point for an interval of time. Suppose a particle on a streak line passes the location of
dye ξ at a time τ ≤ t. Then the equation of the streak line is x = x[a(ξ , τ), t]. See
Aris (1962), Chapter 4 for more details. In steady flow the streamlines, path lines,
and streak lines all coincide.
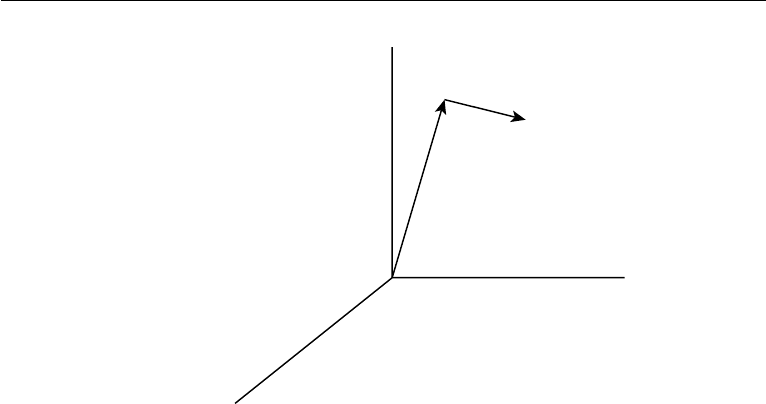
5. Reference Frame and Streamline Pattern
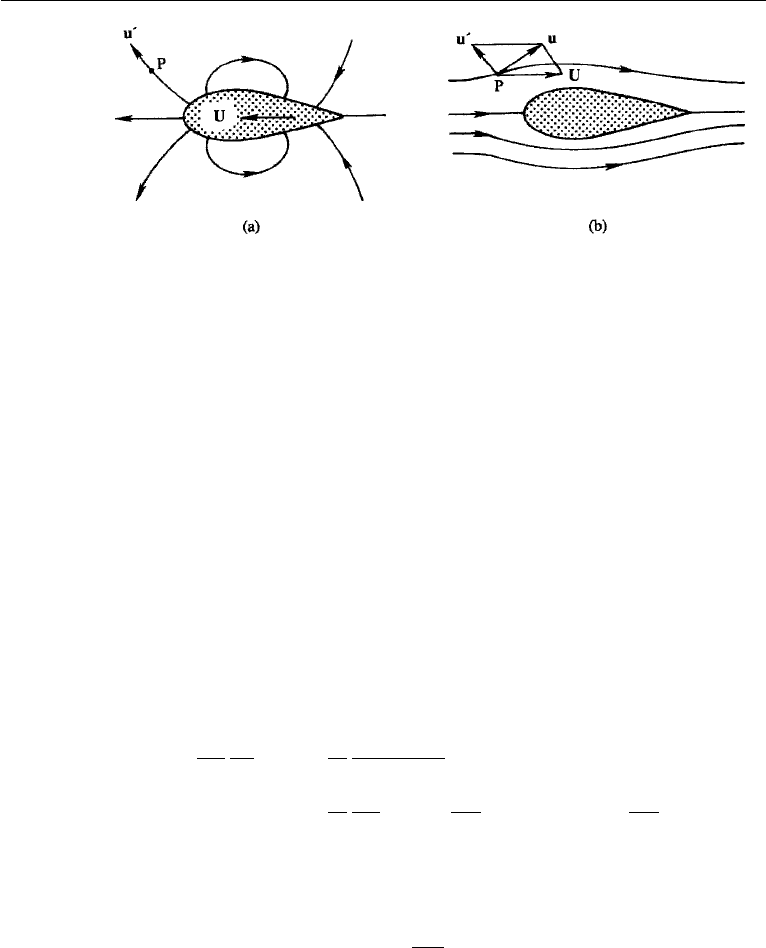
A flow that is steady in one reference frame is not necessarily so in another. Consider
the flow past a ship moving at a steady velocity U, with the frame of reference (that
is, the observer) attached to the river bank (Figure 3.8a). To this observer the local
flow characteristics appear to change with time, and thus appear to be unsteady. If,
60 Kinematics
Figure 3.8 Flow past a ship with respect to two observers: (a) observer on river bank; (b) observer on ship.
on the other hand, the observer is standing on the ship, the flow pattern is steady
(Figure 3.8b). The steady flow pattern can be obtained from the unsteady pattern of
Figure 3.8a by superposing on the latter a velocity U to the right. This causes the
ship to come to a halt and the river to move with velocity U at infinity. It follows that
any velocity vector u in Figure 3.8b is obtained by adding the corresponding velocity
vector u
of Figure 3.8a and the free stream velocity vector U.
6. Linear Strain Rate
A study of the dynamics of fluid flows involves determination of the forces on an
element, which depend on the amount and nature of its deformation, or strain. The
deformation of a fluid is similar to that of a solid, where one defines normal strain as
the change in length per unit length of a linear element, and shear strain as change
ofa90
◦
angle. Analogous quantities are defined in a fluid flow, the basic difference
being that one defines strain rates in a fluid because it continues to deform.
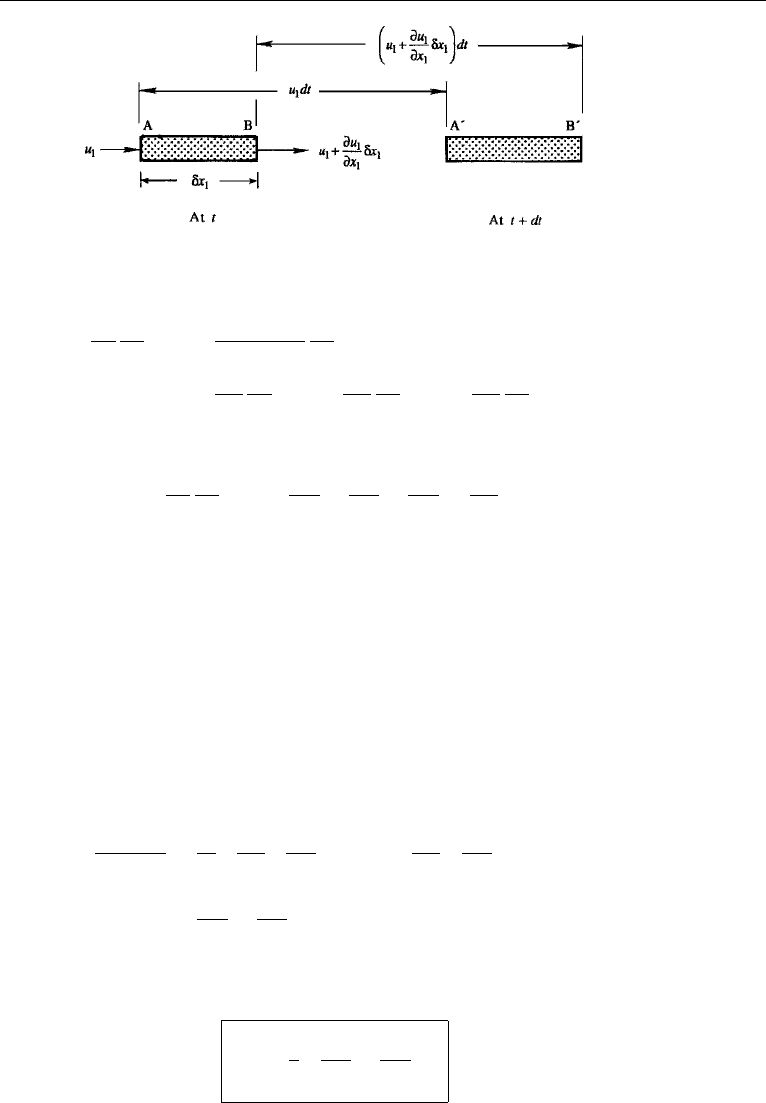
Consider first the linear or normal strain rate of a fluid element in the x
1
direction
(Figure 3.9). The rate of change of length per unit length is
1
δx
1
D
Dt
(δx
1
) =
1
dt
A
B
− AB
AB
=
1
dt
1
δx
1
δx
1
+
∂u
1
∂x
1
δx
1
dt − δx
1
=
∂u
1
∂x
1
.
The material derivative symbol D/Dt has been used because we have implicitly
followed a fluid particle. In general, the linear strain rate in the α direction is
∂u
α
∂x
α
, (3.8)
where no summation over the repeated index α is implied. Greek symbols such as α
and β are commonly used when the summation convention is violated.
The sum of the linear strain rates in the three mutually orthogonal directions
gives the rate of change of volume per unit volume, called the volumetric strain rate
(also called the bulk strain rate). To see this, consider a fluid element of sides δx
1
,
7. Shear Strain Rate 61
Figure 3.9 Linear strain rate. Here, A
B
= AB + BB
− AA
.
δx
2
, and δx
3
. Defining δᐂ ≡ δx
1
δx
2
δx
3
, the volumetric strain rate is
1
δᐂ
D
Dt
(δ
ᐂ) =
1
δx
1
δx
2
δx
3
D
Dt
(δx
1
δx
2
δx
3
),
=
1
δx
1
D
Dt
(δx
1
) +
1
δx
2
D
Dt
(δx
2
) +
1
δx
3
D
Dt
(δx
3
),
that is,
1
δᐂ
D
Dt
(δ
ᐂ) =
∂u
1
∂x
1
+
∂u
2
∂x
2
+
∂u
3
∂x
3
=
∂u
i
∂x
i
. (3.9)
The quantity ∂u
i
/∂x
i
is the sum of the diagonal terms of the velocity gradient
tensor ∂u
i
/∂x
j
. As a scalar, it is invariant with respect to rotation of coordinates.
Equation (3.9) will be used later in deriving the law of conservation of mass.
7. Shear Strain Rate
In addition to undergoing normal strain rates, a fluid element may also simply deform
in shape. The shear strain rate of an element is defined as the rate of decrease of the
angle formed by two mutually perpendicular lines on the element. The shear strain so
calculated depends on the orientation of the line pair. Figure 3.10 shows the position
of an element with sides parallel to the coordinate axes at time t, and its subsequent
position at t +dt. The rate of shear strain is
dα + dβ
dt
=
1
dt
1
δx
2
∂u
1
∂x
2
δx
2
dt
+
1
δx
1
∂u
2
∂x
1
δx
1
dt
=
∂u
1
∂x
2
+
∂u
2
∂x
1
. (3.10)
An examination of equations (3.8) and (3.10) shows that we can describe the
deformation of a fluid element in terms of the strain rate tensor
e
ij
≡
1
2
∂u
i
∂x
j
+
∂u
j
∂x
i
.
(3.11)