Cohen I.M., Kundu P.K. Fluid Mechanics
Подождите немного. Документ загружается.

22 Introduction
The pressure of the reference state decreases vertically as
dp
a
dz
=−ρ
a
g. (1.36)
In the ocean the speed of sound c is defined by c
2
= ∂p/∂ρ, where the partial derivative
is taken at constant values of entropy and salinity. In the reference state these variables
are uniform, so that dp
a
= c
2
dρ
a
. Therefore, the density in the neutrally stable state
varies due to the compressibility effect at a rate
dρ
a
dz
=
1
c
2
dp
a
dz
=
1
c
2
(−ρ
a
g) =−
ρg
c
2
, (1.37)
where the subscript “a” on ρ has been dropped because ρ
a
is nearly equal to the actual
density ρ.
The static stability of the ocean is determined by the sign of the potential density
gradient
dρ
pot
dz
=
dρ
dz
−
dρ
a
dz
=
dρ
dz
+
ρg
c
2
. (1.38)
The medium is statically stable if the potential density gradient is negative, and
so on. For a perfect gas, it can be shown that equations (1.30) and (1.38) are
equivalent.
Scale Height of the Atmosphere
Expressions for pressure distribution and “thickness” of the atmosphere can be
obtained by assuming that they are isothermal. This is a good assumption in the
lower 70 km of the atmosphere, where the absolute temperature remains within 15%
of 250 K. The hydrostatic distribution is
dp
dz
=−ρg =−
pg
RT
.
Integration gives
p = p
0
e
−gz/RT
,
where p
0
is the pressure at z = 0 . The pressure therefore falls to e
−1
of its surface
value in a height RT /g. The quantity RT/g, called the scale height, is a good measure
of the thickness of the atmosphere. For an average atmospheric temperature of T =
250 K, the scale height is RT/g = 7.3 km.
Exercises
1. Estimate the height to which water at 20
◦
C will rise in a capillary glass
tube 3 mm in diameter exposed to the atmosphere. For water in contact with glass the
wetting angle is nearly 90
◦
.At20
◦
C and water-air combination, σ = 0.073 N/m.
(Answer: h = 0.99 cm.)
Exercises 23
2. Consider the viscous flow in a channel of width 2b. The channel is aligned
in the x direction, and the velocity at a distance y from the centerline is given by the
parabolic distribution
u(y) = U
0
1 −
y
2
b
2
.
In terms of the viscosity µ, calculate the shear stress at a distance of y = b/2.
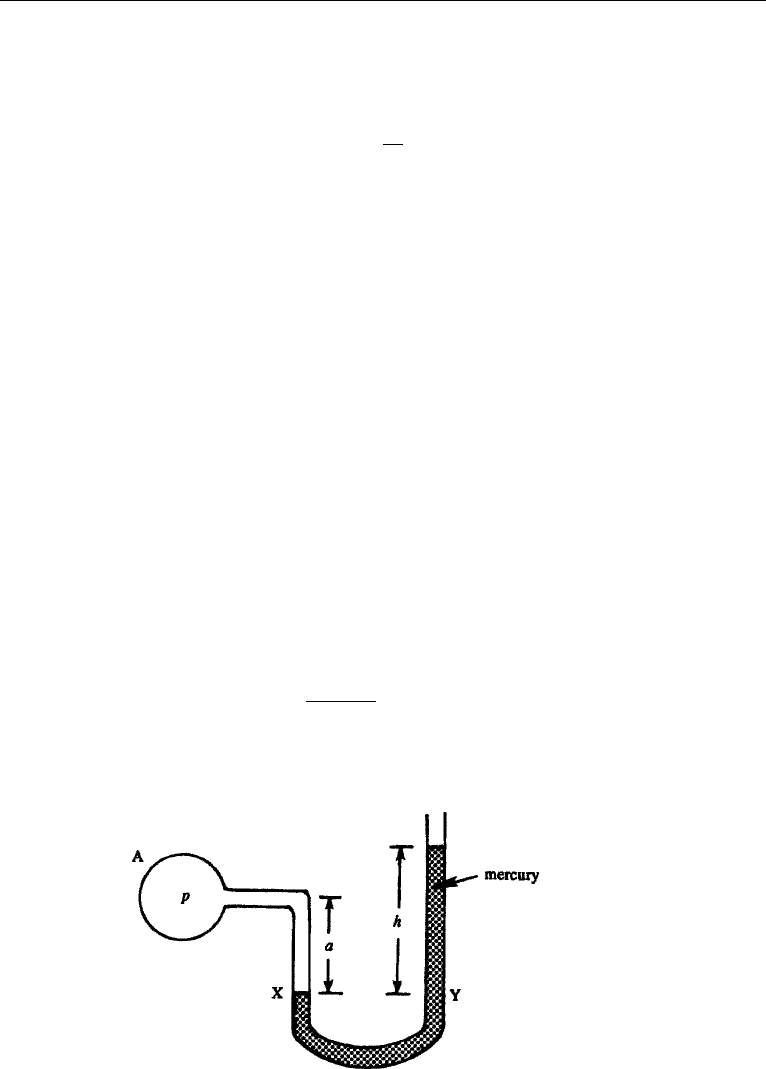
3. Figure 1.10 shows a manometer, which is a U-shaped tube containing mer-
cury of density ρ
m
. Manometers are used as pressure measuring devices. If the fluid
in the tank A has a pressure p and density ρ, then show that the gauge pressure in the
tank is
p − p
atm
= ρ
m
gh −ρga.
Note that the last term on the right-hand side is negligible if ρ ρ
m
.(Hint: Equate
the pressures at X and Y .)
4. A cylinder contains 2 kg of air at 50
◦
C and a pressure of 3 bars. The air is
compressed until its pressure rises to 8 bars. What is the initial volume? Find the final
volume for both isothermal compression and isentropic compression.
5. Assume that the temperature of the atmosphere varies with height z as
T = T
0
+ Kz.
Show that the pressure varies with height as
p = p
0
T
0
T
0
+ Kz
g/KR
,
where g is gravity and R is the gas constant.
Figure 1.10 A mercury manometer.

24 Introduction
6. Suppose the atmospheric temperature varies according to
T = 15 − 0.001z
where T is in degrees Celsius and height z is in meters. Is this atmosphere stable?
7. Prove that if e(T , v) = e(T ) only and if h(T , p) = h(T ) only, then the
(thermal) equation of state is equation (1.21) or pv = kT .
8. For a reversible adiabatic process in a perfect gas with constant specific
heats, derive equations (1.25) and (1.26) starting from equation (1.18).
9. Consider a heat insulated enclosure that is separated into two compartments
of volumes V
1
and V
2
, containing perfect gases with pressures and temperatures of
p
1
, p
2
, and T
1
, T
2
, respectively. The compartments are separated by an imperme-
able membrane that conducts heat (but not mass). Calculate the final steady-state
temperature assuming each of the gases has constant specific heats.
10. Consider the initial state of an enclosure with two compartments as described
in Exercise 9. At t = 0, the membrane is broken and the gases are mixed. Calculate
the final temperature.
11. A heavy piston of weight W is dropped onto a thermally insulated cylinder
of cross-sectional area A containing a perfect gas of constant specific heats, and
initially having the external pressure p
1
, temperature T
1
, and volume V
1
. After some
oscillations, the piston reaches an equilibrium position L meters below the equilibrium
position of a weightless piston. Find L. Is there an entropy increase?
Literature Cited
Taylor, G. I. (1974). The interaction between experiment and theory in fluid mechanics. Annual Review of
Fluid Mechanics 6: 1–16.
Von Karman, T. (1954). Aerodynamics, New York: McGraw-Hill.
Supplemental Reading
Batchelor, G. K. (1967). “An Introduction to Fluid Dynamics,” London: Cambridge University Press,
(A detailed discussion of classical thermodynamics, kinetic theory of gases, surface tension effects,
and transport phenomena is given.)
Hatsopoulos, G. N. and J. H. Keenan (1981). Principles of General Thermodynamics. Melbourne, FL:
Krieger Publishing Co. (This is a good text on thermodynamics.)
Prandtl, L. and O. G. Tietjens (1934). Fundamentals of Hydro- and Aeromechanics, New York: Dover
Publications. (A clear and simple discussion of potential and adiabatic temperature gradients is given.)

Chapter 2
Cartesian Tensors
1. Scalars and Vectors .............. 25
2. Rotation of Axes: Formal Definition
of a Vector ....................... 26
3. Multiplication of Matrices ........ 29
4. Second-Order Tensor ............ 30
5. Contraction and Multiplication . . 32
6. Force on a Surface ............... 33
Example 2.1 .................... 35
7. Kronecker Delta and Alternating
Tensor........................... 36
8. Dot Product ..................... 37
9. Cross Product ................... 38
10. Operator ∇: Gradient, Divergence,
and Curl ........................ 38
11. Symmetric and Antisymmetric
Tensors .......................... 40
12. Eigenvalues and Eigenvectors of a
Symmetric Tensor ................ 41
Example 2.2 .................... 42
13. Gauss’ Theorem ................. 44
Example 2.3 .................... 45
14. Stokes’ Theorem ................. 47
Example 2.4 .................... 48
15. Comma Notation ................ 49
16. Boldface vs Indicial Notation..... 49
Exercises ........................ 50
Literature Cited ................. 51
Supplemental Reading ........... 51
1. Scalars and Vectors
In fluid mechanics we need to deal with quantities of various complexities. Some
of these are defined by only one component and are called scalars, some others are
defined by three components and are called vectors, and certain other variables called
tensors need as many as nine components for a complete description. We shall assume
that the reader is familiar with a certain amount of algebra and calculus of vectors.
The concept and manipulation of tensors is the subject of this chapter.
A scalar is any quantity that is completely specified by a magnitude only, along
with its unit. It is independent of the coordinate system. Examples of scalars are
temperature and density of the fluid. A vector is any quantity that has a magnitude
and a direction, and can be completely described by its components along three
specified coordinate directions. A vector is usually denoted by a boldface symbol,
for example, x for position and u for velocity. We can take a Cartesian coordinate
system x
1
,x
2
,x
3
, with unit vectors a
1
, a
2
, and a
3
in the three mutually perpendicular
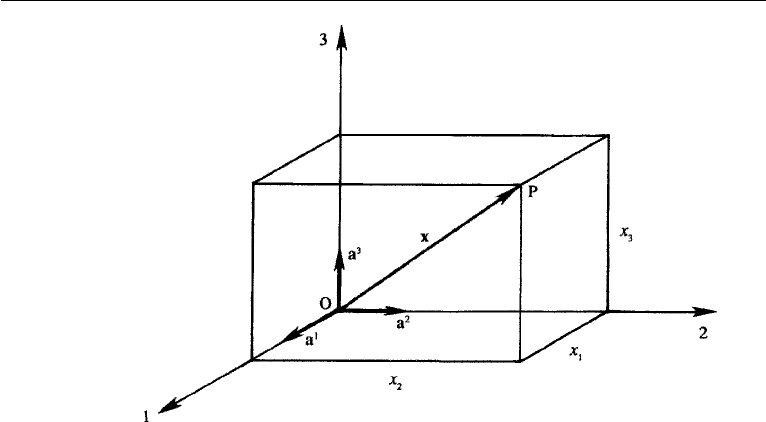
directions (Figure 2.1). (In texts on vector analysis, the unit vectors are usually denoted
by i , j, and k. We cannot use this simple notation here because we shall use ij k to
25
©2010 Elsevier Inc. All rights reserved.
DOI: 10.1016/B978-0-12-381399-2.50002-2
26 Cartesian Tensors
Figure 2.1 Position vector OP and its three Cartesian components (x
1
,x
2
,x
3
). The three unit vectors
are a
1
, a
2
, and a
3
.
denote components of a vector.) Then the position vector is written as
x = a
1
x
1
+ a
2
x
2
+ a
3
x
3
,
where (x
1
,x
2
,x
3
) are the components of x along the coordinate directions. (The
superscripts on the unit vectors a do not denote the components of a vector; the a’s
are vectors themselves.) Instead of writing all three components explicitly, we can
indicate the three Cartesian components of a vector by an index that takes all possible
values of 1, 2, and 3. For example, the components of the position vector can be
denoted by x
i
, where i takes all of its possible values, namely, 1, 2, and 3. To obey the
laws of algebra that we shall present, the components of a vector should be written
as a column. For example,
x =
x
1
x
2
x
3
.
In matrix algebra, one defines the transpose as the matrix obtained by interchanging
rows and columns. For example, the transpose of a column matrix x is the row matrix
x
T
=[x
1
x
2
x
3
].
2. Rotation of Axes: Formal Definition of a Vector
A vector can be formally defined as any quantity whose components change similarly
to the components of a position vector under the rotation of the coordinate system.

2. Rotation of Axes: Formal Definition of a Vector 27
Figure 2.2 Rotation of coordinate systemO123toO1
2
3
.
Let x
1
x
2
x
3
be the original axes, and x
1
x
2
x
3
be the rotated system (Figure 2.2). The
components of the position vector x in the original and rotated systems are denoted
by x
i
and x
i
, respectively. The cosine of the angle between the old i and new j axes
is represented by C
ij
. Here, the first index of the C matrix refers to the old axes,
and the second index of C refers to the new axes. It is apparent that C
ij
= C
ji
.A
little geometry shows that the components in the rotated system are related to the
components in the original system by
x
j
= x
1
C
1j
+ x
2
C
2j
+ x
3
C
3j
=
3
i=1
x
i
C
ij
. (2.1)
For simplicity, we shall verify the validity of equation (2.1) in two dimensions only.
Referring to Figure 2.3, let α
ij
be the angle between old i and new j axes, so that
C
ij
= cos α
ij
. Then
x
1
= OD = OC + AB = x
1
cos α
11
+ x
2
sin α
11
. (2.2)
As α
11
= 90
◦
−α
21
,wehavesinα
11
= cos α
21
= C
21
. Equation (2.2) then becomes
x
1
= x
1
C
11
+ x
2
C
21
=
2
i=1
x
i
C
i1
. (2.3)
In a similar manner
x
2
= PD = PB − DB = x
2
cos α
11
− x
1
sin α
11
.
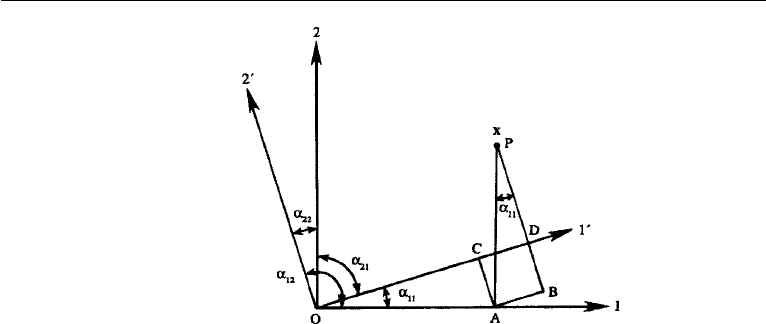
28 Cartesian Tensors
Figure 2.3 Rotation of a coordinate system in two dimensions.
As α
11
= α
22
= α
12
− 90
◦
(Figure 2.3), this becomes
x
2
= x
2
cos α
22
+ x
1
cos α
12
=
2
i=1
x
i
C
i2
. (2.4)
In two dimensions, equation (2.1) reduces to equation (2.3) for j = 1, and to equa-
tion (2.4) for j = 2. This completes our verification of equation (2.1).
Note that the index i appears twice in the same term on the right-hand side of
equation (2.1), and a summation is carried out over all values of this repeated index.
This type of summation over repeated indices appears frequently in tensor notation.
A convention is therefore adopted that, whenever an index occurs twice in a term, a
summation over the repeated index is implied, although no summation sign is explicitly
written. This is frequently called the Einstein summation convention. Equation (2.1)
is then simply written as
x
j
= x
i
C
ij
, (2.5)
where a summation over i is understood on the right-hand side.
The free index on both sides of equation (2.5) is j, and i is the repeated or dummy
index. Obviously any letter (other than j ) can be used as the dummy index without
changing the meaning of this equation. For example, equation (2.5) can be written
equivalently as
x
i
C
ij
= x
k
C
kj
= x
m
C
mj
=···,
because they all mean x
j
= C
1j
x
1
+ C
2j
x
2
+ C
3j
x
3
. Likewise, any letter can also
be used for the free index, as long as the same free index is used on both sides of
the equation. For example, denoting the free index by i and the summed index by k,
equation (2.5) can be written as
x
i
= x
k
C
ki
. (2.6)

3. Multiplication of Matrices 29
This is because the set of three equations represented by equation (2.5) corresponding
to all values of j is the same set of equations represented by equation (2.6) for all
values of i.
It is easy to show that the components of x in the old coordinate system are
related to those in the rotated system by
x
j
= C
ji
x
i
. (2.7)
Note that the indicial positions on the right-hand side of this relation are different
from those in equation (2.5), because the first index of C is summed in equation (2.5),
whereas the second index of C is summed in equation (2.7).
We can now formally define a Cartesian vector as any quantity that transforms like
a position vector under the rotation of the coordinate system. Therefore, by analogy
with equation (2.5), u is a vector if its components transform as
u
j
= u
i
C
ij
. (2.8)
3. Multiplication of Matrices
In this chapter we shall generally follow the convention that 3 × 3 matrices are repre-
sented by uppercase letters, and column vectors are represented by lowercase letters.
(An exception will be the use of lowercase τ for the stress matrix.) Let A and B be
two 3×3 matrices. The product of A and B is defined as the matrix P whose elements
are related to those of A and B by
P
ij
=
3
k=1
A
ik
B
kj
,
or, using the summation convention
P
ij
= A
ik
B
kj
.
(2.9)
Symbolically, this is written as
P = A
•
B. (2.10)
A single dot between A and B is included in equation (2.10) to signify that a single
index is summed on the right-hand side of equation (2.9). The important thing to note
in equation (2.9) is that the elements are summed over the inner or adjacent index k.
It is sometimes useful to write equation (2.9) as
P
ij
= A
ik
B
kj
= (A
•
B)
ij
,
where the last term is to be read as the “ij -element of the product of matrices A
and B.”

30 Cartesian Tensors
In explicit form, equation (2.9) is written as
P
11
P
12
P
13
P
21
P
22
P
23
P
31
P
32
P
33
=
A
11
A
12
A
13
A
21
A
22
A
23
A
31
A
32
A
33
B
11
B
12
B
13
B
21
B
22
B
23
B
31
B
32
B
33
(2.11)
Note that equation (2.9) signifies that the ij -element of P is determined by multiplying
the elements in the i-row of A and the j -column of B, and summing. For example,
P
12
= A
11
B
12
+ A
12
B
22
+ A
13
B
32
.
This is indicated by the dotted lines in equation (2.11). It is clear that we can define
the product A
•
B only if the number of columns of A equals the number of rows of B.
Equation (2.9) can be used to determine the product of a 3 × 3 matrix and a
vector, if the vector is written as a column. For example, equation (2.6) can be written
as x
i
= C
T
ik
x
k
, which is now of the form of equation (2.9) because the summed index
k is adjacent. In matrix form equation (2.6) can therefore be written as
x
1
x
2
x
3
=
C
11
C
12
C
13
C
21
C
22
C
23
C
31
C
32
C
33
T
x
1
x
2
x
3
.
Symbolically, the preceding is
x
= C
T
•
x,
whereas equation (2.7) is
x = C
•
x
.
4. Second-Order Tensor
We have seen that scalars can be represented by a single number, and a Cartesian
vector can be represented by three numbers. There are other quantities, however, that
need more than three components for a complete description. For example, the stress
(equal to force per unit area) at a point in a material needs nine components for a
complete specification because two directions (and, therefore, two free indices) are
involved in its description. One direction specifies the orientation of the surface on
which the stress is being sought, and the other specifies the direction of the force on
that surface. For example, the j -component of the force on a surface whose outward
normal points in the i-direction is denoted by τ
ij
. (Here, we are departing from the
convention followed in the rest of the chapter, namely, that tensors are represented by
uppercase letters. It is customary to denote the stress tensor by the lowercase τ .) The
first index of τ
ij
denotes the direction of the normal, and the second index denotes
the direction in which the force is being projected.
This is shown in Figure 2.4, which gives the normal and shear stresses on an
infinitesimal cube whose surfaces are parallel to the coordinate planes. The stresses
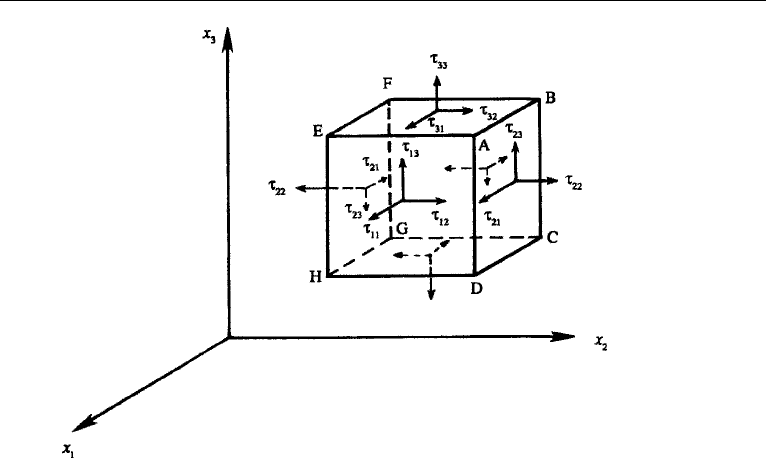
4. Second-Order Tensor 31
Figure 2.4 Stress field at a point. Positive normal and shear stresses are shown. For clarity, the stresses
on faces FBCG and CDHG are not labeled.
are positive if they are directed as in this figure. The sign convention is that, on a
surface whose outward normal points in the positive direction of a coordinate axis,
the normal and shear stresses are positive if they point in the positive direction of
the axes. For example, on the surface ABCD, whose outward normal points in the
positive x
2
direction, the positive stresses τ
21
, τ
22
, and τ
23
point toward the x
1
,x
2
and x
3
directions, respectively. (Clearly, the normal stresses are positive if they are
tensile and negative if they are compressive.) On the opposite face EFGH the stress
components have the same value as on ABCD, but their directions are reversed. This
is because Figure 2.4 shows the stresses at a point. The cube shown is supposed to be
of “zero” size, so that the faces ABCD and EFGH are just opposite faces of a plane
perpendicular to the x
2
-axis. That is why the stresses on the opposite faces are equal
and opposite.
Recall that a vector u can be completely specified by the three components u
i
(where i = 1, 2, 3). We say “completely specified” because the components of u in
any direction other than the original axes can be found from equation (2.8). Similarly,
the state of stress at a point can be completely specified by the nine components τ
ij
(where i, j = 1, 2, 3), which can be written as the matrix
τ =
τ
11
τ
12
τ
13
τ
21
τ
22
τ
23
τ
31
τ
32
τ
33
.
The specification of the preceding nine components of the stress on surfaces parallel
to the coordinate axes completely determines the state of stress at a point, because