Численные методы турбулентных несжимаемых течений (Том 4 Часть 2)
Подождите немного. Документ загружается.

15.2 Uniqueness of c
D
and c
L
125
refined computational meshes, with h the smallest element diameter in the
mesh.
We find that S
h
(
ˆ
U;
ˆ
ψ) shows a slow logarithmic growth, and extrapolating
we find that S
ν
(
ˆ
U;
ˆ
ψ) ∼ ν
−1/2
. We take this as evidence of computability and
weak uniqueness of c
D
, and we obtain similar results for the lift coefficient c
L
.
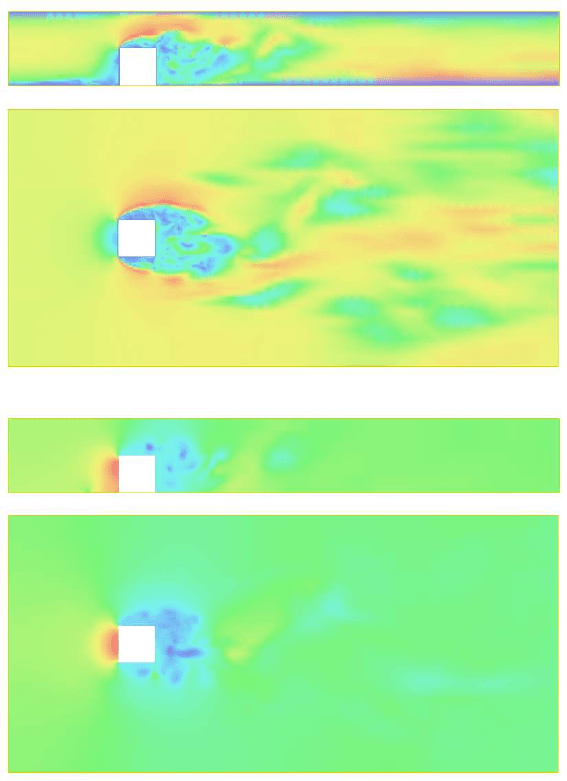
Fig. 15.2. Surface mounted cube: velocity |U | (upper) and pressure P (lower), in
the x
1
x
2
-plane at x
3
= 3.5H and in the x
1
x
3
-plane at x
2
= 0.5H.
126 15 Weak Uniqueness by Computation
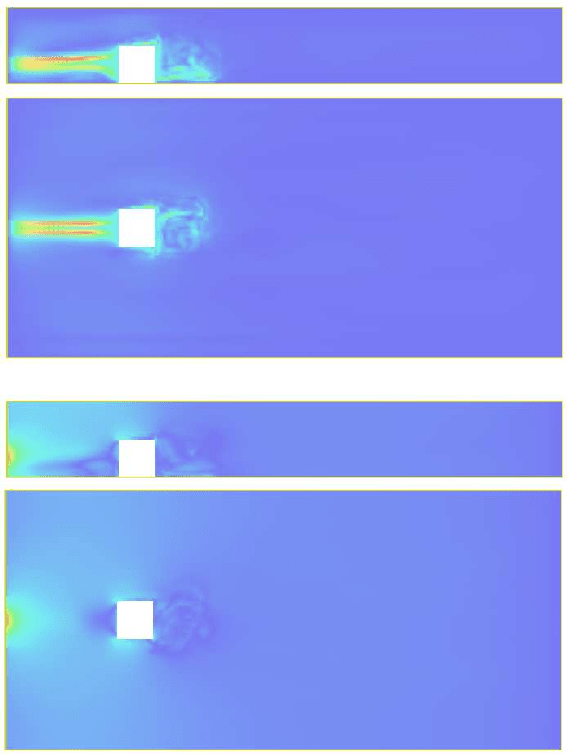
Fig. 15.3. Surface mounted cube: dual velocity |ϕ
h
| (upper), and dual pressure |ι
h
|
(middle), in the x
1
x
2
-plane at x
3
= 3.5H and in the x
1
x
3
-plane at x
2
= 0.5H.
15.3 Non-Uniqueness of D(t)
We now investigate the computability and weak uniqueness of the normalized
drag force D(t) at a specific time t. In Figure 15.1 we show the variation in
time of D(t) computed on different meshes, and we notice that D(t) for a
given t does not appear to converge with decreasing h: The best we can say
seems to be that 1.3 ≤ D(t) ≤ 1.7.
We now choose one of the finer meshes corresponding to h
−1
≈ 500, and
we compute the dual solution corresponding to a mean value of D(t) over a
15.3 Non-Uniqueness of D(t) 127
0.8 1 1.2 1.4 1.6 1.8 2 2.2
2
2.2
2.4
2.6
2.8
3
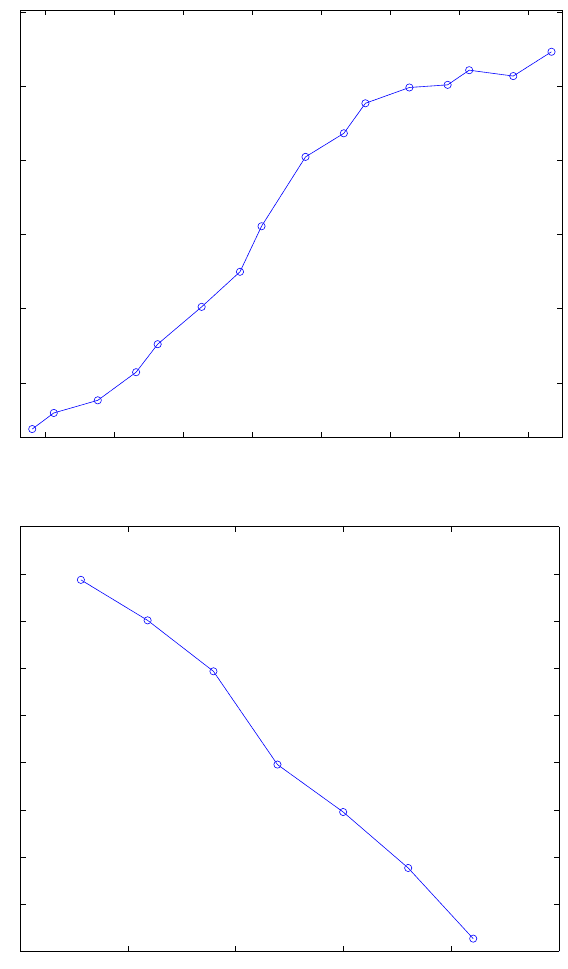
Fig. 15.4. log
10
-log
10
-plot of S
h
(
ˆ
U;
ˆ
ψ) as a function of 1/h.
−1.5 −1 −0.5 0 0.5 1
2.8
2.9
3
3.1
3.2
3.3
3.4
3.5
3.6
3.7
Fig. 15.5. S
h
(
ˆ
U;
ˆ
ψ) corresponding to computation of the mean drag force (nor-
malized) over a time interval [
ˆ
t
0
,
ˆ
t ], as a function of the interval length |
ˆ
t −
ˆ
t
0
|
(log
10
-log
10
-plot).
128 15 Weak Uniqueness by Computation
time interval [
ˆ
t
0
,
ˆ
t ], where we let
ˆ
t
0
→
ˆ
t. We thus seek to compute the point
value D(
ˆ
t ).
In Figure 15.5 we find a growth of S
h
(
ˆ
U;
ˆ
ψ) similar to |
ˆ
t −
ˆ
t
0
|
−1/2
, as
we let
ˆ
t
0
→
ˆ
t. The results show that for |
ˆ
t −
ˆ
t
0
| = 1/16 we have S
h
(
ˆ
U;
ˆ
ψ) ≈
10ν
−1
, and extrapolation of the computational results indicate further growth
of
˜
S
0
(
ˆ
ψ), as
ˆ
t
0
→
ˆ
t and h → ν. We take this as evidence of non-computability
and weak non-uniqueness of D(
ˆ
t ).
15.4 Stability of the Dual Solution with Respect to Time
Sampling
To get an idea of the dependence of stability factors on the primal solution
ˆ
U used to compute the dual solution, we sample the coefficients in the dual
problem with different frequencies in time and compute the corresponding
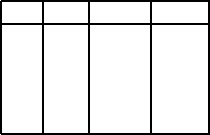
dual solutions. In Table 5.1 we display different norms of the dual solution
ˆϕ
h
and notice that different sampling frequencies give very similar stability
factors, and in Fig. 15.6 we plot snapshots of different dual solutions, again
very similar.
freq. kϕ
h
k k∇ϕ
h
k k ˆϕ
h
k
ˆ
V
8 7.99 646 652
4 8.04 658 663
4
∗
8.14 679 684
2 8.23 693 698
1 8.35 744 749
Table 15.1. Surface mounted cube: Norms of the dual solution ϕ
h
linearized at
a primal velocity U sampled with different frequencies (normalized by the inflow
velocity U
∞
= 1), with “4
∗
” being a translated sampling of “4” with the same
frequency.
15.5 Conclusion
We have given computational evidence of weak uniqueness of mean values
such as c
D
and c
L
and weak non-uniqueness of a momentary value D(t) of
the total drag. In the computations we observe this phenomenon as a con-
tinuous degradation of computability (increasing stability factor S
0
(
ˆ
ψ)) as
the length of the time interval underlying the mean value decreases to zero.
Effectively we seem to be able to compute c
D
and c
L
up to a tolerance of
roughly 0.05 taking mean values in time of length 10, while the variation of a
momentary value D(t) may be almost a factor 10 larger. Thus the distinction
15.5 Conclusion 129
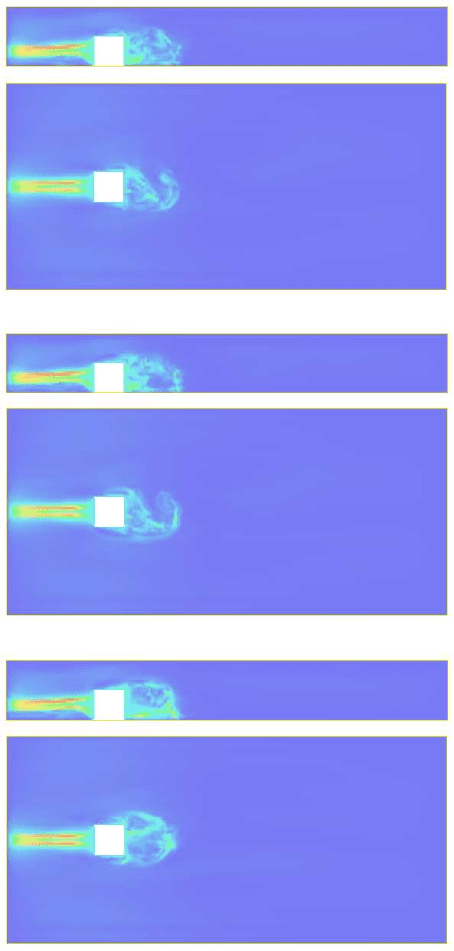
Fig. 15.6. Surface mounted cube: snapshots of the dual velocity |ϕ
h
| sampled 4
times per time unit (upper), 2 times per time unit (middle), and once per time
unit (lower), corresponding to “4”, “2”, and “1”, in Table 15.1, in the x
1
x
2
-plane at
x
3
= 3.5H and in the x
1
x
3
-plane at x
2
= 0.5H.
130 15 Weak Uniqueness by Computation
between computability (or weak uniqueness) and non-computability (weak
non-uniqueness) may in practice be just one order of magnitude in output
error, rather than a difference between 0 and 1 (or ∞).
Of course, this is what you may expect to see in a quantified computational
world, as compared to an ideal mathematical world. In particular, we are
led to measure residuals of approximate weak solutions, rather than working
with the exact weak solutions of Leray with zero residuals. A such quantified
mathematical world is in fact richer than an ideal zero residual world, and
thus may be more accessible.

16
Existence of -Weak Solutions by G2
One may be tempted to believe that physical laminar flows correspond
to smooth mathematical solutions (of the Navier–Stokes equations) and
turbulent flows to non-smooth solutions (Oseen in Hydrodynamik ...).
On peut v´erifier en outre que l’´energie cin´etique totale du liquide reste
born´ee; mais il ne semble pas possible de d´eduire de ce fait que le mouvement
lui-mˆeme reste r´egulier; j’ai mˆeme indiqu´e une raison qui me fait croire `a
l’existence de mouvements devenant irr´eguliers au bout d’un temps fini; je
n’ai malheuresement pas r´eussi `a forger un exemple d’une telle singularit´e
(Leray 1934).
We will now discuss in a little more detail the Struggle for Existence.(Darwin)
16.1 Introduction
We now show that we may construct -weak solutions of the NS equations
using stabilized Galerkin finite element methods in the form of G2. We do
this in order to highlight a basic property of a G2 solution, which is designed
so as to have a a small residual in a weak sense, and thus may pass as an
-weak solution for a certain depending on the mesh size. We do not here
give full details of the formulation of G2, e.g. concerning the use of continuous
or discontinuous Galerkin for the time stepping, but focus on the basic role of
the stabilization in G2, and give a complete description of G2 in Chapter 28.
In the discussion of the Clay Prize Problem we commented that an alterna-
tive way of proving existence of -weak solutions is to first prove existence for
suitably regularized NS equations, which is possible using standard methods
of mathematical analysis, and to then prove that a regularized solution passes
as an -weak solution for some depending on the regularization, which tends
to zero with the regularization.

132 16 Existence of -Weak Solutions by G2
16.2 The Basic Energy Estimate for the Navier–Stokes
Equations
We start by deriving a basic stability estimate of energy type for the velocity
u of the NS equations (5.3), assuming for simplicity that f = 0. This is about
the only analytical a priori estimate known for the NS equations. We thus
formally assume existence of a (pointwise) solution (u, p), and derive a bound
for the velocity u in terms of given data.
Scalar multiplication of the momentum equation by u and integration with
respect to x gives
1
2
d
dt
Z
Ω
|u|
2
dx + ν
3
X
i=1
Z
Ω
|∇u
i
|
2
dx = 0,
because by partial integration (with boundary terms vanishing),
Z
Ω
∇p · u dx = −
Z
Ω
p∇ · u dx = 0
and
Z
Ω
(u · ∇)u · u dx = −
Z
Ω
(u · ∇)u · u dx −
Z
Ω
∇ · u|u|
2
dx
so that
Z
Ω
(u · ∇)u · u dx = 0. (16.1)
Integrating next with respect to time, we obtain the following basic a priori
stability estimate for
ˆ
t > 0 in terms of the L
2
-norm of the initial velocity u
0
:
E
ν
(u) ≡
1
2
ku(·,
ˆ
t )k
2
+ D
ν
(u,
ˆ
t ) =
1
2
ku
0
k
2
, (16.2)
where
D
ν
(u,
ˆ
t ) = ν
3
X
i=1
Z
ˆ
t
0
k∇u
i
k
2
dt,
and where k· k denotes the L
2
(Ω)-norm. This estimate gives a bound on the
kinetic energy of the velocity with D
ν
(u,
ˆ
t ) representing the total dissipa-
tion from the viscosity of the fluid over the time interval [0,
ˆ
t ]. We see that
the growth of this term with time corresponds to a decrease of the velocity
(momentum) of the flow (with f = 0).
The characteristic feature of a turbulent flow is that D
ν
(u,
ˆ
t ) is compar-
atively large, while in a laminar flow with ν small, D
ν
(u,
ˆ
t ) is small. With
D
ν
(u,
ˆ
t ) ∼ 1 in a turbulent flow and |∇u| uniformly distributed, we may
expect to have pointwise
|∇u
i
| ∼ ν
−1/2
. (16.3)

16.3 Existence by G2 133
16.3 Existence by G2
To generate approximate weak solutions of the NS equations, we use a finite
element method of the form (assuming for simplicity f = 0): Find
ˆ
U ≡
ˆ
U
h
∈
ˆ
V
h
, where
ˆ
V
h
⊂
ˆ
V is a finite dimensional subspace of piecewise polynomial
functions defined on a computational mesh in space-time of mesh size h, such
that
((R(
ˆ
U), ˆv)) + ((hR(
ˆ
U), R(ˆv))) = 0, ∀ˆv ∈
ˆ
V
h
, (16.4)
where R( ˆw) ≡ (R
1
( ˆw), R
2
(w)), ˆw = (w, r) and
R
1
( ˆw) = ˙w + U ·∇w + ∇r − ν∆w,
R
2
(w) = ∇ · w,
(16.5)
with element-wise definition of second order terms. We here interpret a con-
vection term ((U · ∇w, v)) as
1
2
((U · ∇w, v)) −
1
2
((U · ∇v, w)
which is literally true if ∇ · U = 0. With this interpretation we will have
((U · ∇U, U )) = 0, which corresponds to (16.1), even if the divergence of the
finite element velocity U does not vanish exactly. With this interpretation we
obtain choosing ˆv =
ˆ
U in (16.4) (still assuming f = 0):
E
ν
(U) + ((hR(
ˆ
U), R(
ˆ
U))) =
1
2
ku
0
k
2
. (16.6)
Fig. 16.1. Richard Courant (1888–1972) introduced the finite element method in
1922, in an existence proof of a version of the Riemann mapping theorem. Boris Grig-
orievich Galerkin (1871–1945), Russian engineer who introduced the finite element
method as a computational tool.
The finite element method (16.4) is a stabilized Galerkin method with
the term ((R(
ˆ
U), v)) corresponding to Galerkin’s method and the term

134 16 Existence of -Weak Solutions by G2
((hR(ˆu), R(ˆv))) corresponding to a weighted residual least squares method
with stabilizing effect expressed in (16.6). We also refer to this method as
General Galerkin or G2, and we thus refer to
ˆ
U as a G2-solution. The ex-
istence of a discrete solution
ˆ
U ≡
ˆ
U
h
∈ V
h
follows by Brouwer’s fixed point
theorem combined with the stability estimate (16.6).
We now return to the main objective of this chapter of showing the exis-
tence of -weak solutions to the NS equations. For all ˆv ∈
ˆ
V , we have with
ˆv
h
∈
ˆ
V
h
a standard interpolant of v satisfying kh
−1
(ˆv −ˆv
h
)k ≤ C
i
kˆvk
ˆ
V
, using
also (16.4),
((R(
ˆ
U), ˆv)) = ((R(
ˆ
U), ˆv − ˆv
h
)) − ((hR(
ˆ
U), R(ˆv
h
)))
≤ C
i
khR(
ˆ
U)kkˆvk
ˆ
V
+ M (U)khR(
ˆ
U)kkˆvk
ˆ
V
,
(16.7)
where M(U ) is a pointwise bound of the velocity U(x, t), and C
i
≈ 1 is an
interpolation constant. It follows that the G2-solution
ˆ
U is an -weak solution
with
= (C
i
+ M (U))khR(
ˆ
U)k ≤
√
h(C
i
+ M (U))ku
0
k,
since from the energy stability estimate k
√
hR(
ˆ
U)k ≤ ku
0
k.
Assuming now that M(U ) = M(U
h
) is bounded with h > 0, and letting
C
i
+ M(U) ≤ C, it follows that
ˆ
U is an -weak solution with = C
√
h,
assuming ku
0
k ≤ 1. More generally, we may say that a G2 solution
ˆ
U is an
-weak solution with = CkhR(
ˆ
U)k.
We have now demonstrated the existence of an -weak solution to the
NS equations for any , assuming that the maximum computed velocity is
bounded (or grows slower than h
−1/2
). More generally, we have shown that a
G2-solution
ˆ
U is an -weak solution with = C
U
khR(
ˆ
U)k with C
U
= C
i
+
M(U). Computing
ˆ
U, we can compute = C
U
khR(
ˆ
U)k and thus determine
the corresponding .
We conclude that coming up with -weak solutions to the NS equations
is easy, if we use G2 and a computer (and find that C
U
grows slower than
h
−1/2
).
We now turn to the question of estimation of the error in output of G2-
solutions, which of course as above will bring in the corresponding stability
factor.
Remark. In estimating above ((R(
ˆ
U), ˆv−ˆv
h
)) we did not properly account for
the diffusion term ((ν∇U, ∇(v −v
h
))). Doing so would introduce an additional
term which most easily can be estimated by a term of the form C
√
νkˆvk
ˆ
V
,
and to bound this term as above we would need that ν ≤ h. Since ν often is
smaller than 10
−4
for the problems we focus on in this book, this would not
be restrictive in most cases. For larger ν we can turn the argument around in
a different way, but we do not here enter into details.