Buschow K.H.J. (Ed.) Concise Encyclopedia of Magnetic and Superconducting Materials
Подождите немного. Документ загружается.

Moments: Magnetism). On application of a magnetic
field, many R-based compounds exhibit transitions in
the magnetization, usually denoted as metamagnetic
transitions, examples of which are presented below.
For a more detailed survey see Gignoux and Schmitt
(1991).
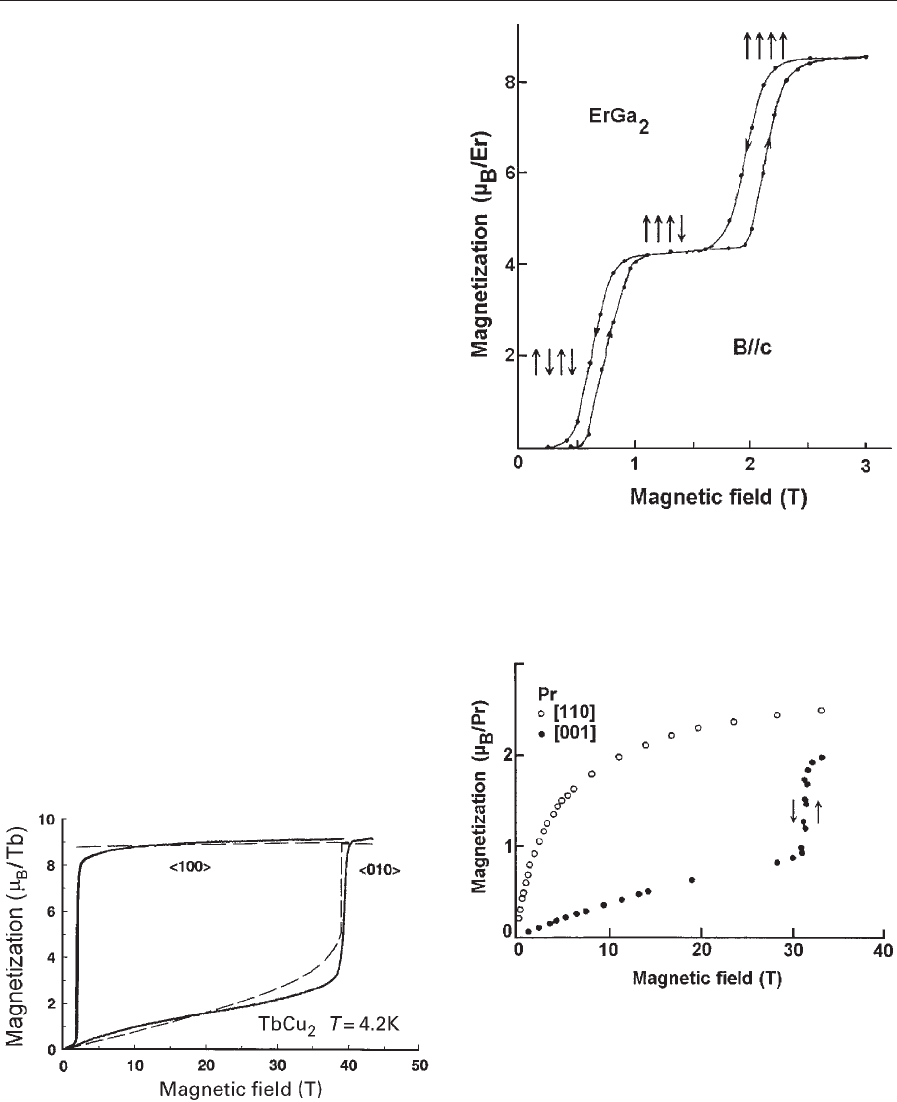
Antiferromagnetic materials with small magnetic
anisotropy may, at a certain field value which usually
is not very high, exhibit a so-called spin-flop transi-
tion in which the collinear antiparallel magnetic mo-
ments rotate to a direction perpendicular to the
applied field, thereby approximately preserving the
collinear structure. This type of metamagnetic tran-
sition is often encountered in gadolinium com-
pounds, which generally have small magnetic
anisotropy since gadolinium has no orbital moment.
Another type of metamagnetic transition, the spin-
flip transition, is found in antiferromagnetic materials
with stronger magnetic anisotropy. In this transition,
a simple single-step phase transition takes place from
the antiferromagnetic state to the forced-ferromag-
netic (magnetically saturated) state. A beautiful ex-
ample is the orthorhombic compound TbCu
2
in
which the terbium moments form a collinear antif-
erromagnetic structure with the moments aligned
along the a direction. If the field is applied along this
direction, a spin-flip occurs in 2 T (Fig. 2). If the field
is applied along the b direction, a similar transition is
observed at almost 40 T after the antiparallel terbium
moments have been rotated from the a to the b di-
rection. In many cases, the magnetization process of
antiferromagnetic compounds is more complex and
two- (Fig. 3) or multistep metamagnetic processes are
involved in reaching the forced-ferromagnetic state.
The occurrence of metamagnetic transitions is not
limited to magnetically ordered R-based materials. In
Fig. 4, the magnetization of the paramagnetic metal
praseodymium is seen to exhibit a metamagnetic
transition. This transition can be ascribed to the
crossing of two crystal field levels, a singlet which is
the ground state in zero field and a magnetic excited
Figure 2
Magnetization of TbCu
2
at 4.2 K in magnetic fields
applied along the a and b axes (after Andreev et al.
1998).
Figure 3
Magnetization of the hexagonal compound ErGa
2
at
different temperatures in a magnetic field applied along
the c axis (after Gignoux and Schmitt 1991).
Figure 4
Magnetization of praseodymium at 4.2 K in magnetic
fields applied along and perpendicular to the c axis
(after Gignoux and Schmitt 1991).
750
Magnetism: High-field
level which has the lowest energy above a certain
value of the applied field.
4. 3d–4f Magnetism
Intermetallic compounds of R metals and the late-3d
transition (T) metals form a very important class of
materials that find numerous applications in e.g.,
permanent magnets, magnetostrictive devices, mag-
neto-optical recording, etc. In the R–T compounds
with T ¼Fe, Co, the strongest interaction is the
3d–3d interaction which primarily determines the
Curie temperature. The 4f–4f interaction is very weak
and can be neglected. The 4f–3d interaction, although
much weaker than the 3d–3d interaction, is of special
importance since by this interaction the strongly an-
isotropic R sublattice magnetization is coupled to the
much less anisotropic T sublattice magnetization.
The interaction between 4f and 3d moments is based
on an indirect interaction between the 4f and 3d
spins, which is antiferromagnetic. This, together with
Hund’s rules, explains why the magnetic order is
ferromagnetic in R–T compounds where R is a lighter
element in the series and ferrimagnetic if R is a heav-
ier element (see Alloys of 4f (R) and 3d (T) Elements:
Magnetism).
The way in which the magnetic moment configu-
ration in R–T compounds is affected by a magnetic
field, applied along the principal crystallographic di-
rections of a single crystal, can generally be well de-
scribed in a molecular-field model with two magnetic
sublattices, the R and T sublattices. From such an
analysis, quantitative information on the magnetic
anisotropy (the crystal field interaction) and on the
strength of the 4f–3d interaction can be obtained.
Evidently, such information is most readily obtained
from magnetization measurements on ferrimagnetic
compounds, in which the strict antiparallel configu-
ration of the moments will be affected by a suffi-
ciently high magnetic field.
Single crystals of various classes of R–T com-
pounds with R ¼Co and Fe have become available,
for instance the R
2
T
17
and R
2
T
14
B series, and their
magnetization behavior has been investigated sys-
tematically in high magnetic fields applied along the
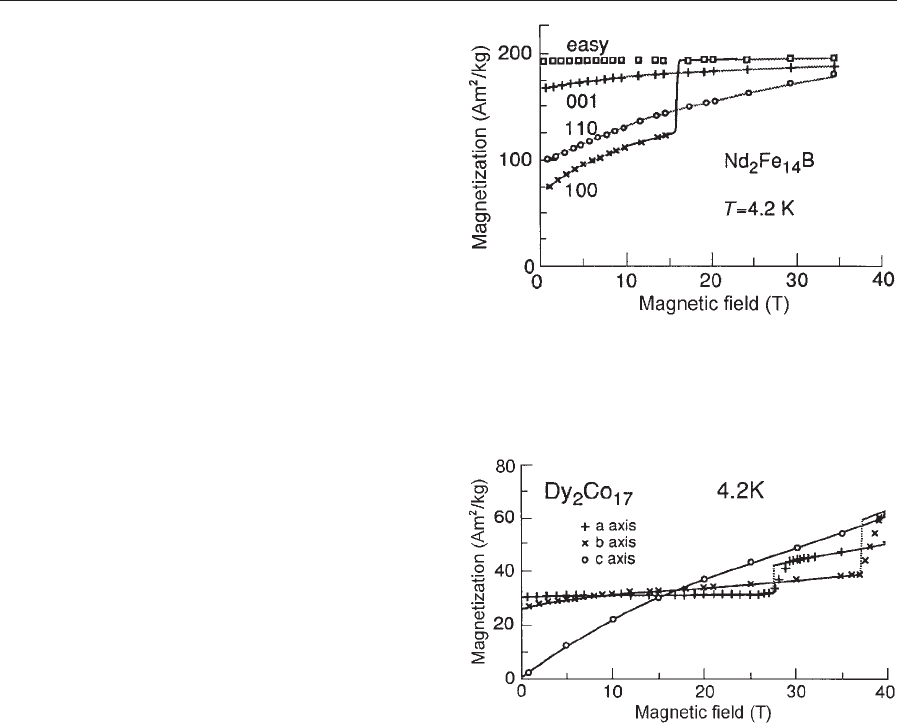
main crystallographic directions. The magnetic iso-
therms at 4.2 K of the ferromagnetic compound
Nd
2
Fe
14
B are shown in Fig. 5. In this compound,
the magnetic moments on the neodymium and the
iron atoms are parallel and the Nd–Fe coupling is
sufficiently strong to keep the moments rigidly cou-
pled in the parallel orientation during the magneti-
zation process. Therefore, the magnetic transition
observed at about 16 T with the field applied in the
[100] direction finds its origin exclusively in the mag-
netic anisotropy. Transitions like this one can be as-
cribed to higher-order terms in the anisotropy or,
equivalently, to higher-order crystal field coefficients
and allow for a rather precise determination of these
parameters. The transition in Nd
2
Fe
14
B is generally
referred to as a first-order magnetization process
(FOMP). In Pr
2
Fe
14
B, two transitions have been
found which are of second-order type (SOMP).
High-field magnetic transitions that are based on
the competition between the strength of the applied
field and the strength of the 4f–3d exchange interac-
tion have been extensively studied on single crystals
of ferrimagnetic R
2
Co
17
and R
2
Fe
17
compounds. As
an example, the magnetization of the hexagonal com-
pound Dy
2
Co
17
is shown in Fig. 6, measured with the
field along the three principal crystallographic direc-
tions. As can be seen, the magnetic anisotropy of
Dy
2
Co
17
is of easy-plane type, the dysprosium mo-
ments lying along the a axis in the basal plane, an-
tiparallel with the cobalt moments, as represented by
Figure 5
Magnetization of Nd
2
Fe
14
B at 4.2 K in magnetic fields
applied along several crystallographic directions
(Buschow 1988).
Figure 6
Magnetization of Dy
2
Co
17
at 4.2 K in magnetic fields
applied along the three main crystallographic directions
(Franse and Radwanski 1993).
751
Magnetism: High-field
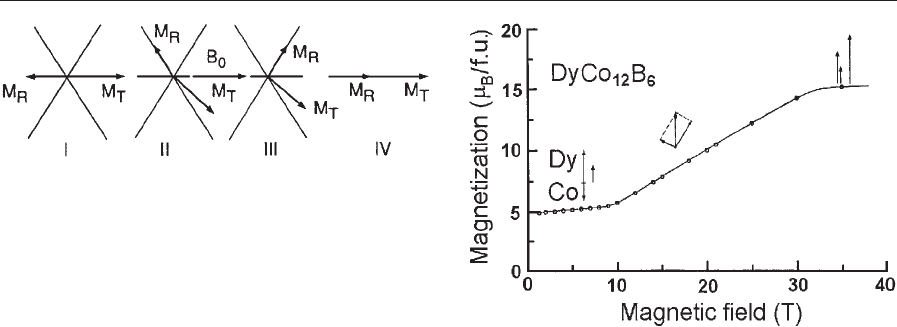
configuration I in Fig. 7. The resulting magnetization
is constant up to about 28 T and equal to the differ-
ence of the two sublattice magnetizations. At 28 T the
collinear magnetic structure of this ferrimagnet is
broken and a transition takes place to a moment
configuration (II in Fig. 7) in which the dysprosium
moments jump to another easy direction and in which
magnetostatic energy is gained at the expense of ex-
change energy. For the field applied along the b axis,
this transition takes place at a field strength of about
38 T. The solid lines in Fig. 6 correspond to calcu-
lations in terms of a molecular-field model by assum-
ing the existence of two magnetic sublattices, one for
the dysprosium and one for the cobalt moments. On
the basis of the calculations, for the situation with the
field applied along the a axis, in total three transitions
are expected until the parallel, forced-ferromagnetic
arrangement of the two sublattice magnetizations is
reached. When the field is applied along the b axis,
two transitions are expected. Such transitions have
been reported for a large number of compounds of
several series of R–T compounds, such as the R
2
Fe
17
,
R
2
Co
17
, and R
2
Fe
14
B series. Analysis of the magnet-
ization curves has led to knowledge of the crystal field
coefficients for these compounds and has provided
values for the strength of the 4f–3d interaction
(Franse and Radwanski 1993). Also, systematic
trends of these parameters have been established.
An experimental method has also been developed
to measure directly the strength of the 4f–3d inter-
action between the R and the T magnetic moments in
heavy R–T intermetallic compounds. The method
consists of measuring the low-temperature magnetic
isotherms in very high magnetic fields of a single
crystal or of fine single-crystalline powder particles
that can freely rotate in the applied magnetic field.
The free-powder magnetization of DyCo
12
B
6
is
shown as an example in Fig. 8. In this compound,
the breaking of the collinear ferrimagnetic structure
starts at about 10 T. The bending of the sublattice
moments proceeds smoothly up to about 32 T where
the forced ferromagnetic state is reached. The value
of the strength of the Dy–Co exchange interaction
can be obtained by analyzing the observed magnet-
ization during the bending process in terms of a
mean-field description. The very simple magnetiza-
tion process of DyCo
12
B
6
is representative of all R–T
intermetallic compounds, in which the magnetic an-
isotropy of the T sublattice moment is negligible with
respect to the R sublattice anisotropy. For these cas-
es, if the crystal can freely rotate in the applied field,
the R sublattice moment will remain in its easy di-
rection in the crystal during the entire magnetization
process and the magnetization process will be simple.
The magnetization process of DyCo
12
B
6
is very
exceptional in the sense that it is completed in ex-
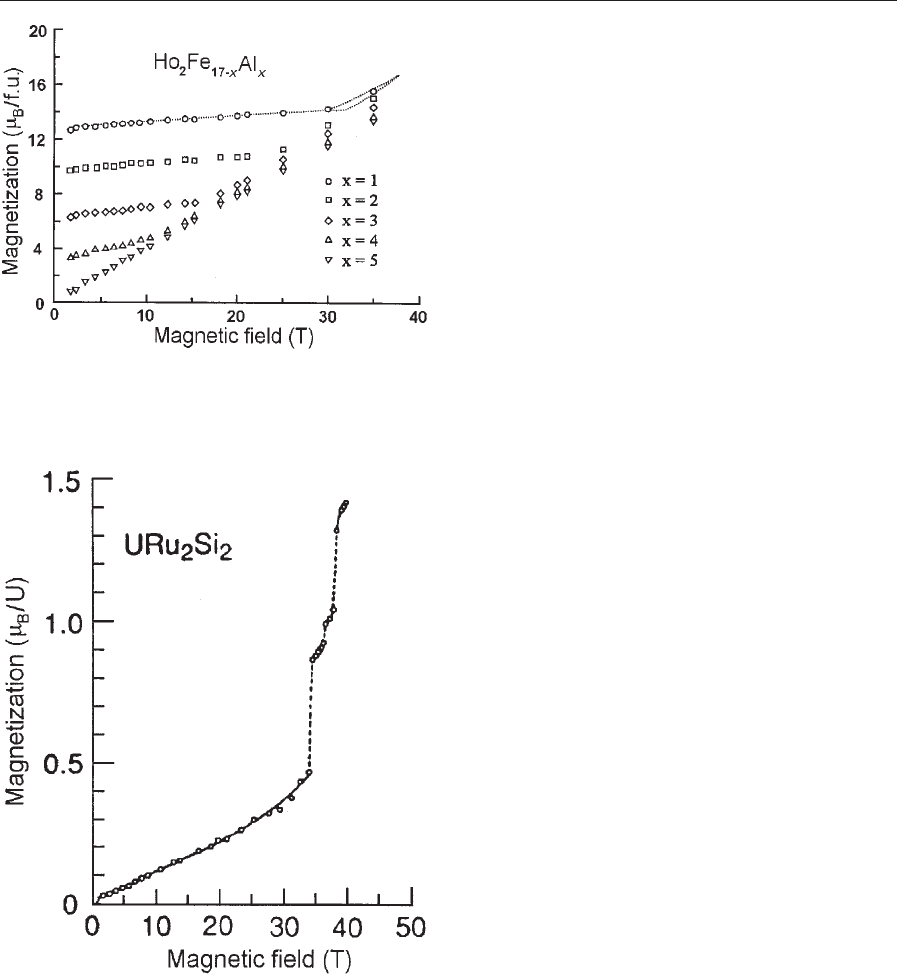
perimentally accessible fields. In general, even the
value of the field where the bending of the sublattice
moments starts is experimentally inaccessible. How-
ever, because, as the theoretical description tells, this
field is proportional to the difference of the two sub-
lattice moments, the value of this field can be reduced
by carrying out suitable chemical substitutions that
make the values of the two sublattice moments more
similar. This is illustrated in Fig. 9 for Ho
2
Fe
17
in
which the iron sublattice moment is larger than the
moment of the holmium sublattice and the two sub-
lattice moments can be made more similar by alumi-
num substitution for iron. In this way the bending
process can be brought in an accessible field range,
allowing for the determination of the Ho–Fe
exchange coupling. Systematic trends of the 4f–3d
interaction within and among series of R–T interme-
tallic compounds could be established on the basis of
magnetization measurements on free powders of a
large variety of properly substituted R–T systems
(Liu et al. 1994).
5. 5f Magnetism
Intermetallic compounds that comprise actinides, e.g.,
uranium, are of special interest since the behavior of
Figure 7
Schematic representation of the various moment
configurations in hexagonal ferrimagnetic easy-plane
R
2
T
17
compounds.
Figure 8
Magnetization of free powder of DyCo
12
B
6
at 4.2 K
(after de Boer 1996).
752
Magnetism: High-field
the 5f electrons is intermediate between itinerant
and localized (Sechovsky and Havela 1998). The
magnetism of uranium compounds is characterized
by complex magnetic structures, unstable magnetic
moments, hybridization of the 5f states with d- and
p-electron states of the ligand atoms, and extremely
large anisotropy that can be associated with this hy-
bridization (see 5f Electron Systems: Magnetic Prop-
erties). The magnetization of the antiferromagnet
URu
2
Si
2
(Fig. 10) nicely illustrates the very large an-
isotropy and the richness of field-induced transitions
that are encountered in uranium compounds. More
examples of the high-field behavior of uranium com-
pounds are given in the review of Sechovsky and
Havela (1998).
See also: Magnetism in Solids: General Introduction;
Magnetic Measurements: Pulsed Field; Magnetic
Phase Transitions: Field-induced (Order to Order)
Bibliography
Andreev A V, Bartashevich M I, Goto T, Divis M, Svoboda P
1998 High-field transition in TbCu
2
. In: Clark R G (ed.)
Proc. 5th Int. Symp. on Research in High Magnetic Fields.
North-Holland, Amsterdam, pp. 479–82 (Physica B 246–247,
497–82)
Buschow K H J 1988 Permanent magnet materials based on 3d-
rich ternary compounds. In: Wohlfarth E P, Buschow K H J
(eds.) Ferromagnetic Materials. North-Holland, Amsterdam,
Vol. 4, pp. 1–129
de Boer F R 1996 The magnetization process in free single-
crystalline particles of rare-earth transition-metal com-
pounds. J. Magn. Magn. Mater. 159, 64–70
Duc N H, Brommer P E 1999 Formation of 3d-moments and
spin fluctuations in some rare-earth-cobalt compounds. In:
Buschow K H J (ed.) Handbook of Magnetic Materials.
North-Holland, Amsterdam, Vol. 12, pp. 259–394
Franse J J M, Radwanski R J 1993 Magnetic properties of
binary rare-earth 3d-transition-metal intermetallic com-
pounds. In: Buschow K H J (ed.) Handbook of Magnetic
Materials. North-Holland, Amsterdam, Vol. 7, pp. 307–501
Gignoux D, Schmitt D 1991 Rare earth intermetallics. J. Magn.
Magn. Mater. 100, 99–125
Gignoux D, Schmitt D 1997 Magnetism of compounds of rare
earths with non-magnetic metals. In: Buschow K H J (ed.)
Handbook of Magnetic Materials. North-Holland, Amster-
dam, Vol. 11, pp. 239–413
Liu J P, de Boer F R, de Chaˆ tel P F, Coehoorn R, Buschow K
H J 1994 On the 4f–3d exchange interaction in intermetallic
compounds. J. Magn. Magn. Mater. 132, 159–79
Luong N H, Franse J J M 1993 Magnetic properties of rare
earths Cu
2
compounds. In: Buschow K H J (ed.) Handbook
of Magnetic Materials. North-Holland, Amsterdam, Vol. 8,
pp. 415–92
Sechovsky V, Havela L 1998 Magnetism of ternary intermetal-
lic compounds of uranium. In: Buschow K H J (ed.) Hand-
book of Magnetic Materials. North-Holland, Amsterdam,
Vol. 11, pp. 1–289
Zvezdin A K 1995 Field induced phase transitions in ferrimag-
nets. In: Buschow K H J (ed.) Handbook of Magnetic Ma-
terials. North-Holland, Amsterdam, Vol. 9, pp. 405–543
F. R. de Boer
Universiteit van Amsterdam, Amsterdam
The Netherlands
Figure 10
Magnetization of URu
2
Si
2
at 4.2 K in magnetic fields
applied parallel and perpendicular to the c axis
(Sechovsky and Havela 1998).
Figure 9
Magnetization of free powder of Ho
2
Fe
17x
Al
x
compounds at 4.2 K (after Zvezdin 1995).
753
Magnetism: High-field
Magnetization Reversal Dynamics
Many important technological applications involve
reversing magnetic moment in a magnetic material
within a very short time period. For instance, in
computer hard-disk drives, storing a single bit re-
quires reversing the magnetic moments of both the
write transducer and the thin film recording medium
in a fraction of a nanosecond. Understanding mag-
netization reversal dynamics is critical in these appli-
cations (Bertram and Zhu 1992, Mao 2000, Zhu
2001, Zhu and Zheng 2002).
In general, magnetization reversal in a magnetic
material, either of a bulk or thin film, or a particulate
form, is always complex. For studying the reversal
dynamics, there are many experimental means, in-
cluding time-resolved Kerr microscopy field in situ
transmission electron microscopy, field in situ scan-
ning electron microscopy with polarization analysis
(SEMPA), and field in situ magnetic force microscopy
(Hubert and Scha
¨
fer 2000).
Magnetization reversal dynamics can also be stud-
ied via micromagnetic modeling. Combining the
gyromagnetic dynamic equation with the classic mi-
cromagnetic theory (Strikman and Treves 1963,
Brown 1978), the dynamic microscopic magnetiza-
tion reversal process in a ferromagnetic object can be
simulated on a computer or on a cluster of computers
(e.g., Zhu 1989). In the modeling, magnetic energy
density, E, that includes magnetocrystalline aniso-
tropy energy, magnetostatic energy, ferromagnetic
exchange energy, and magnetic potential energy
(Zeeman energy), is calculated at each location of
the object:
E ¼ E
anisotropy
þ E
magneto
þ E
exchange
þ E
Zeeman
ð1Þ
The effective magnetic field exerted on a local
magnetic moment is
H ¼
@E
@M
¼
@E
@M
x
#
e
x
þ
@E
@M
y
#
e
y
þ
@E
@M
z
#
e
z
ð2Þ
1. Gyromagnetic Equations with Energy Damping
Consider a magnetic moment with magnetization M
in a magnetic field H. Due to the fact that magnetic
moment in a magnetic material arises from electron
spin angular momentum and orbital angular mo-
mentum, the magnetic moment precesses around the
field direction, described by the following torque
equation (Landau and Lifshitz 1935):
dM
dt
¼gM H ð3Þ
where g is the gyromagnetic constant. In this process,
the angle between the magnetic moment and the field
remains unchanged. In other words, the energy of
the system is conserved. Any energy dissipation
(or often referred to as energy damping) in the sys-
tem results in a reduction of the angle. To include
energy dissipation, one phenomenological form is the
Gilbert equation:
dM
dt
¼gM H þ
a
M
M
dM
dt
ð4Þ
where M is the magnitude of the magnetic moment
and a is referred to as the damping constant (Gilbert
1955). In this form, the damping motion of the mo-
ment direction towards field direction is viscous. The
above implicit form of the dynamic equation can be
transformed into the following explicit one, known as
the Landau–Lifshitz equation (Landau and Lifshitz
1935):
dM
dt
¼g
L
M H
l
M
M M H ð5Þ
with
g
L
¼
g
1 þ a
2
and l ¼
ga
1 þ a
2
In both Gilbert and Landau–Lifshitz equations,
the magnitude of the magnetic moment is unchanged.
Under the Gilbert equation, if the energy does not
depend explicitly on time, the rate of the energy
change is given by (Zhu 1989)
dE
dt
¼m
0
ag
ð1 þ a
2
ÞM
2
7M H7
2
ð6Þ
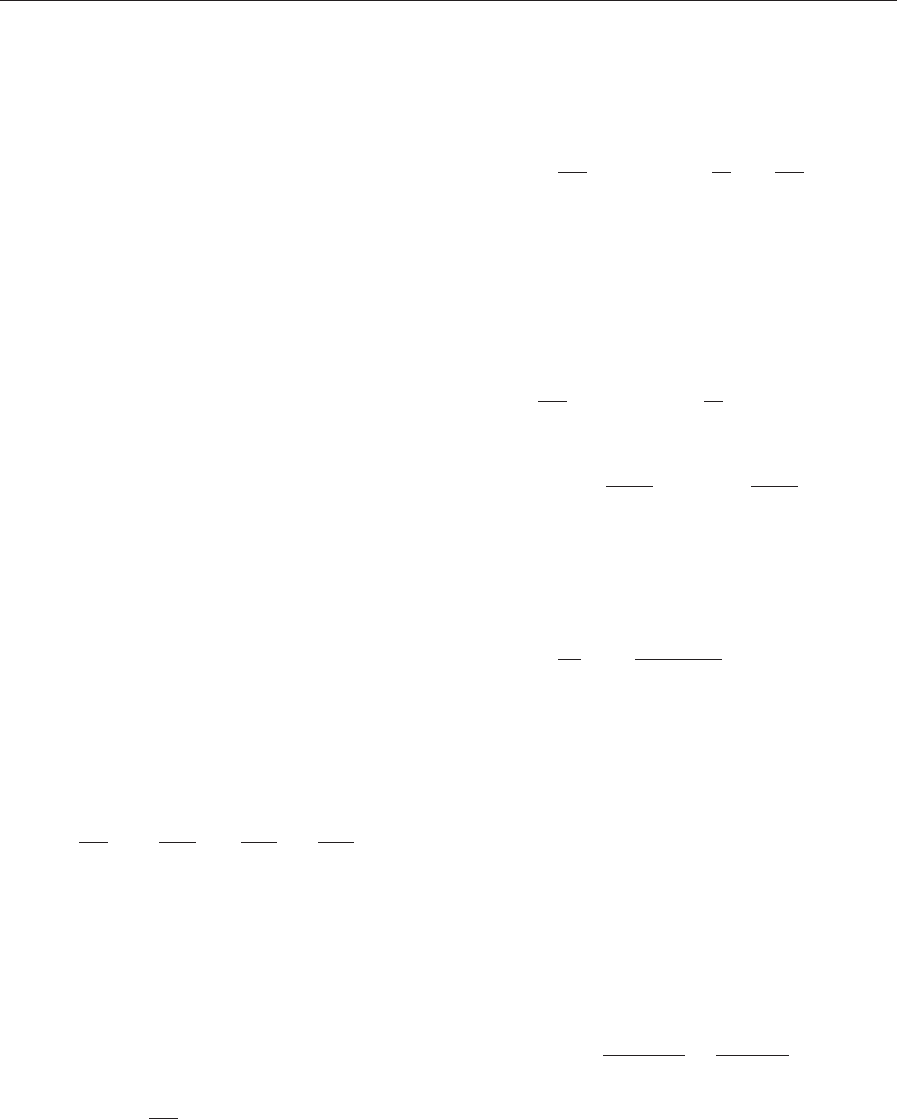
2. Magnetization Reversal of a Uniformly
Magnetized Sphere
Consider a uniformly magnetized single-domain
magnetic sphere in a magnetic field. At nonzero
damping, the magnetic moment of the sphere rotates
towards the field direction while precessing around
the field direction. The smaller the damping constant
a, the greater the number of precession cycles will be
before the magnetic moment aligns with the field di-
rection. Figure 1 shows the calculated trajectories
according to Eqn. (4) for two different values of the
damping constant a. The time duration of the re-
versal, from near antiparallel direction to the parallel
direction, with respect to the field is given by
Dt ¼
1 þ a
2
agðH2H
s
Þ
ln
tanðy
2
=2Þ
tanðy
1
=2Þ
ð7Þ
where y
2
and y
1
are the final and initial angles be-
tween the magnetic moment and the field whose am-
plitude is denoted by H, and H
s
is the switching field
threshold (e.g., the anisotropy field). For a given
magnetic field whose amplitude is greater than the
754
Magnetization Reversal Dynamics
switching field threshold, a ¼1 gives the shortest re-
versal time (Kikuchi 1956).
3. Magnetization Reversal of a Uniformly
Magnetized Thin Film
The dynamic magnetization reversal process in an
always uniformly magnetized magnetic thin film is
quite different than that in an always uniformly mag-
netized sphere. For a magnetization reversal with an
external magnetic field applied in the film plane, the
precession of the magnetic moment around the field
direction causes the magnetization to rotate out of
plane, generating a demagnetization field normal to
the film plane. Subsequently, the magnetization pre-
cesses around this demagnetization field, yielding the
rotation toward the external field direction within
the film plane. Figure 2 shows the trajectories of the
magnetization unit vector for the case of a ¼0 (red
curve) and the case of a ¼0.02 (blue curve). The ro-
tation trajectory of the magnetization vector behaves
very much like a pendulum: at zero damping, the
magnetization swings like an undamped pendulum.
At nonzero damping, the magnetization vector even-
tually rests along the external field direction.
Note that for a uniformly magnetized thin film, it is
the precession of the magnetization that drives the
magnetization reversal in the film plane, in contrast to
the case of uniformly magnetized sphere. The shortest
reversal time for a given external field magnitude
occurs at a relatively small damping constant
depending on the magnitude of the magnetization.
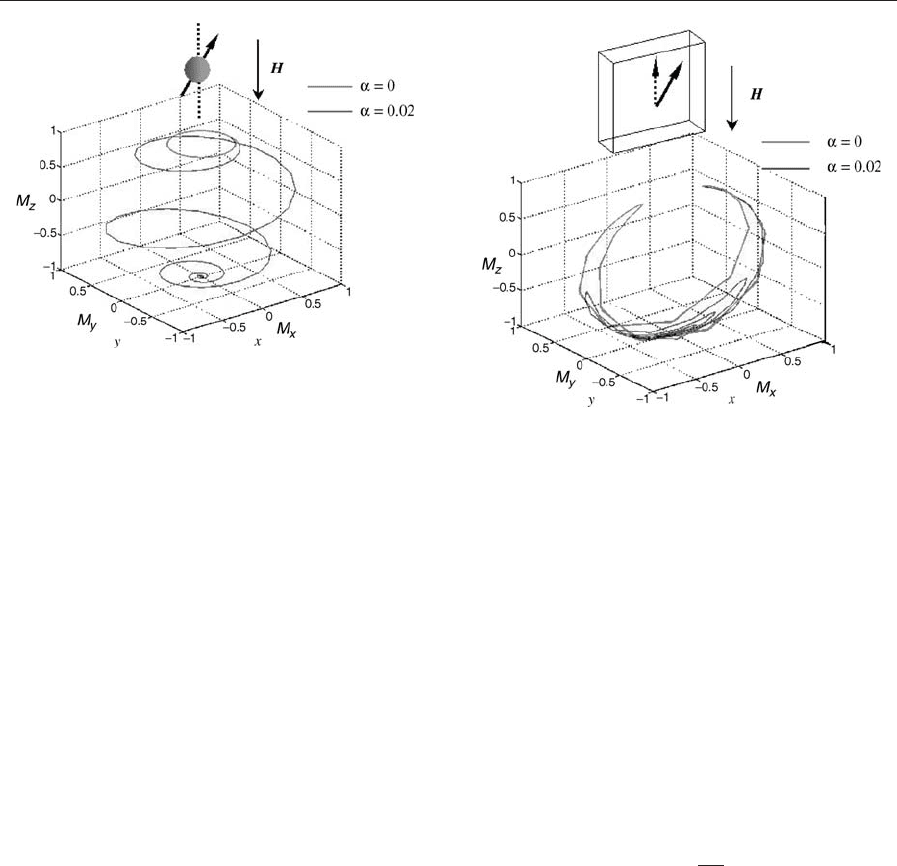
4. Magnetization Reversal of Patterned Mag netic
Thin Film Elements
The two magnetization reversal processes described
in the previous two sections apply only to objects that
have physical dimensions smaller than the exchange
length, defined as the square root of the ratio of
physical dimension significantly greater than the
exchange length:
l
ex
¼
ffiffiffiffiffiffiffi
A
M
2
s
s
ð8Þ
where A is the exchange stiffness constant and M
s
is
the saturation magnetization of the material (Brown
1978). For ferromagnetic objects whose physical di-
mensions are greater than the exchange length, the
dynamic magnetization configurations during a mag-
netization reversal are usually spatially nonuniform.
In the case that the ferromagnetic object is a pat-
terned thin film element, the transient reversal pro-
cess becomes almost independent of the damping
constant, except at very final stage of the reversal.
Figure 3 shows a dynamic reversal process for a
Permalloy thin film elliptical element with a length of
0.6 mm, a width of 0.3 mm, and a thickness of 25 nm.
A damping constant a ¼0 has been assumed. The
Figure 1
Magnetization trajectory of a uniformly magnetized
sphere in a magnetic field. With zero damping,
magnetization gyrates around the field direction with a
constant moment-to-field angle, and the energy of
system is unchanged. With the damping constant
nonzero, the magnetization reverses into the field
direction while gyrating around the field direction.
Figure 2
Magnetization reversal of a uniformly magnetized
permalloy (Ni
81
Fe
19
) film for two different values of the
damping constant a. The magnetization reversal is really
driven by the precession motion of the magnetization.
755
Magnetization Reversal Dynamics
external applied field is assumed to rise exponentially
with a rise time t ¼0.1 ns. The reversal starts as
four magnetization vortices nucleate along the edges
of the element, followed by the motion of the vor-
tices transverse to the field direction, across the film
element. As the vortices move out of the opposite
edges of the element, the magnetization of the entire
element has virtually been reversed, except magnet-
ization still precesses, forming a set of spin waves in
the element. Due to the reversal of the magnetization
direction, the Zeeman energy has been reduced.
Since there is no energy damping during the reversal
process, the Zeeman energy has been transformed
into the ferromagnetic exchange energy stored in
the resulted spin waves. The changes of various en-
ergy densities with time during the reversal are plot-
ted in Fig. 4.
The calculation also show that the transient re-
versal process is virtually unchanged if a small energy
damping is introduced during the reversal process
and the reversal time becomes essentially independent
of the damping constant (Fig. 5). The only difference
is that in the case of nonzero energy damping during
the reversal process, no spin wave is generated after
the completion of the reversal.
For a reversal of a thin film element within the film
plane, in the case of zero energy damping, entropy
becomes the driving force of the reversal: the gener-
ation of the spin wave at the end of the reversal re-
sults in an increase of the system’s entropy. Note that
spin wave is an excellent energy reservoir. Further-
more, a spin wave could directly couple to lattice vi-
brations, creating an energy-damping path through
magnon–phonon interactions.
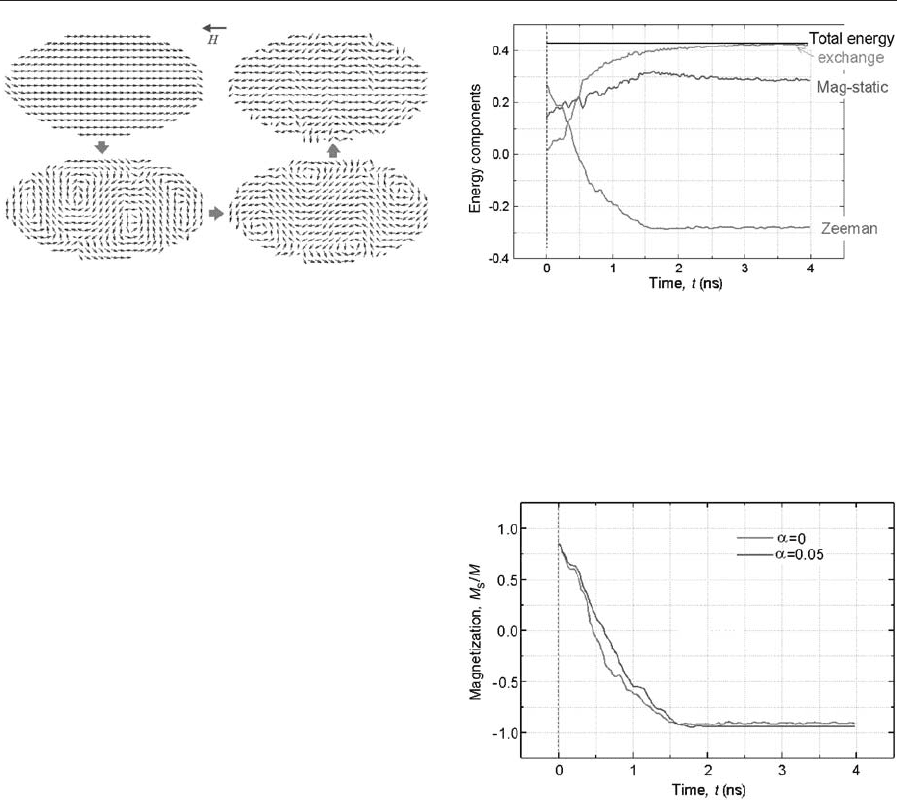
5. Near-uniform Magnetization Switching
The magnetization reversal process described in the
previous section can be characterized as nucleation
and motion of magnetization vortices. The formations
of the vortices are driven by the relatively high mag-
netostatic energy since it is significantly reduced in
a magnetization vortex due to the magnetization flux
closure. When a film becomes sufficiently thin, mag-
netization vortices longer form and the magnetization
reversal becomes near-uniform rotation. Figure 6
shows the magnetization reversal process of a NiFe
film element with a size of 0.5 mm 0.3 mmanda
Figure 3
Calculated magnetization reversal process of an
elliptical permalloy thin film element. The length of the
element is 0.6 mm, width 0.3 mm, and thickness 25 nm.
The reversal starts with the formation of four vortices
along the edges of the element. The four vortices move
across the width of the element, leave magnetization
reversed. At the end, spin waves are generated in the
reversed element.
Figure 4
The dynamic change of various energy densities during
the in-plane magnetization reversal of a patterned
nonsingle domain thin film element with zero energy
damping (a ¼0). The reduction of Zeeman energy
becomes the ferromagnetic exchange energy and
magnetostatic energy stored in the resulted spin waves.
Figure 5
Element-averaged magnetization component along field
direction during a magnetization reversal for two energy
damping constants a ¼0 (red) and a ¼0.05 (blue).
756
Magnetization Reversal Dynamics
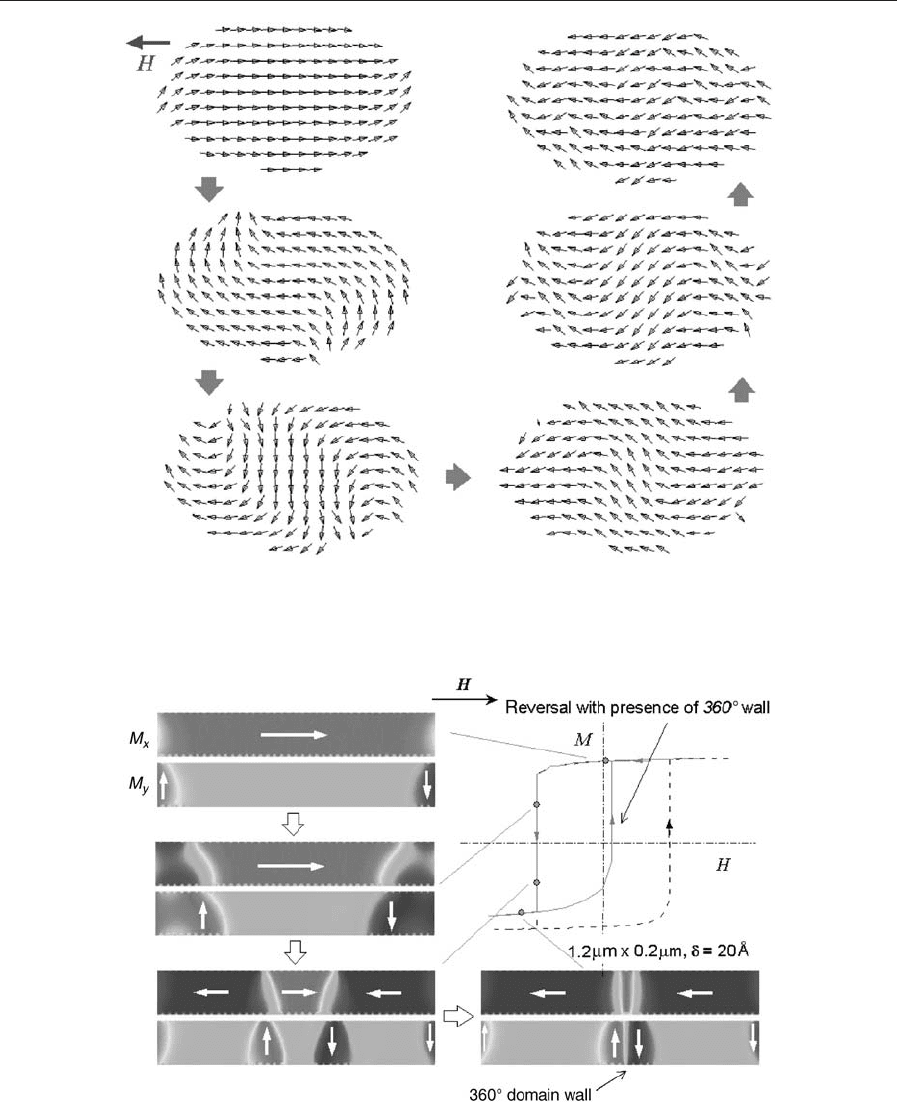
Figure 6
Element-averaged magnetization component along field direction during a magnetization reversal for two energy
damping constants a ¼0 (red) and a ¼0.05 (blue).
Figure 7
Formation of a 3601 domain wall during the reversal of a thin NiFeCo film element that is 1.2 mm 0.2 mm in size and
2 nm in thickness. The two rows of color pictures at each stage during the reversal represent the longitudinal and the
transverse magnetization components, respectively (calculated with a ¼0.02).
757
Magnetization Reversal Dynamics
thickness only 6 nm. No vortex is present at any stage
during the reversal.
6. Effect of the Element Ends
The dynamic magnetization reversal process in a
patterned thin film element strongly depends on
the element’s geometric shape. Reversal of a long
rectangular shaped element is particularly interest-
ing. Figure 7 shows a reversal process in a perm-
alloy element with thickness d ¼2 nm. The length
and the width of the element are 1.2 mm and 0.2 mm,
respectively. The external field is applied along the
element length direction. The magnetizations at
both ends of the element are oriented parallel to
the edges, forming edge domains. The reversal starts
from the two ends and expands into the interior of
the element via motion of the two domain walls.
The magnetization direction within the two domain
walls inherits the magnetization directions of the
two initial edge domains, which are in the opposite
directions in this particular case. As the reversal
progresses, the two domain walls move towards
each other, forming a 3601 domain wall in the mid-
dle of the element. The detailed magnetization con-
figuration of the 3601 domain wall is shown in
Fig. 8. A further significant increase of the field
magnitude is needed to move the 3601 domain walls
out of the side (long) edges. Whereas to reverse the
magnetization back with the presence of the 3601
domain wall, the critical field magnitude becomes
significantly smaller (Fig. 7). The presence of 3601
domain wall in the film element is one of the
important mechanisms causing nonrepeatable mag-
netic switching processes.
7. Element of Relatively Large Sizes
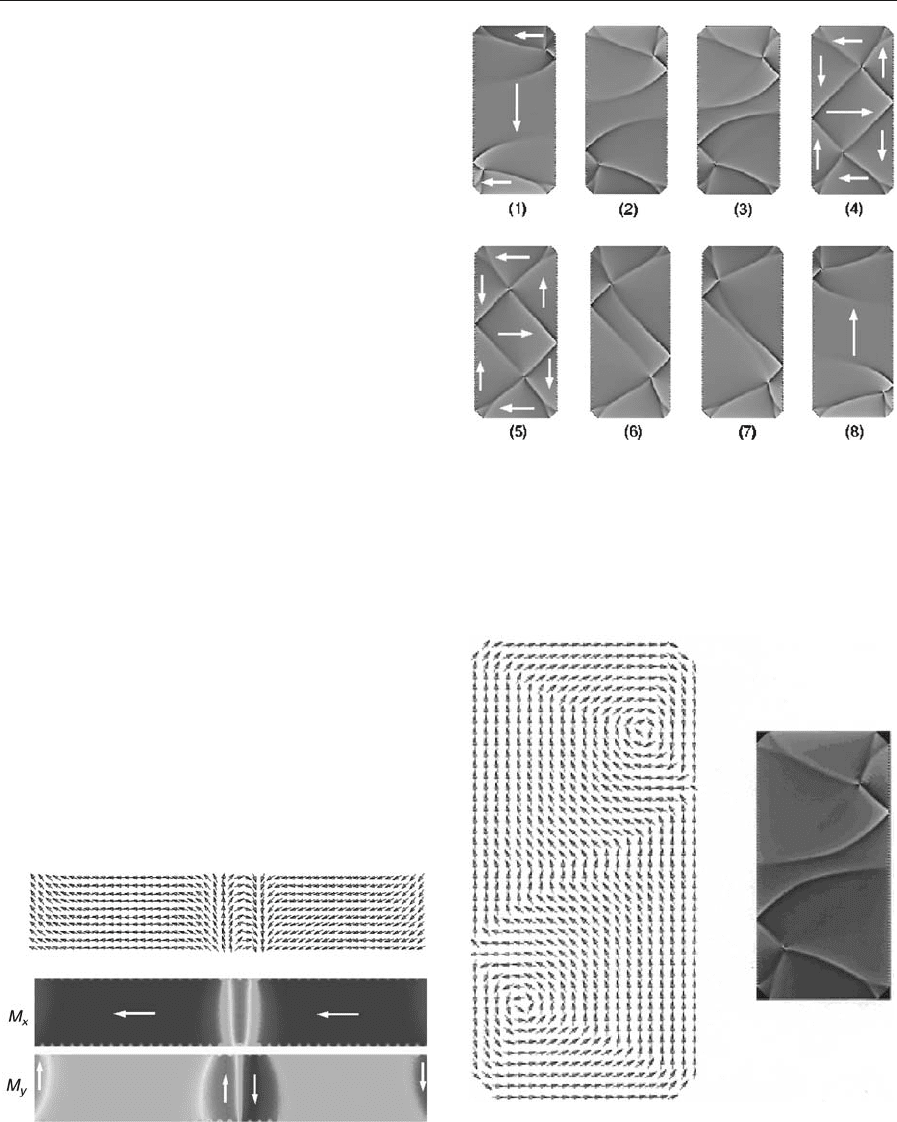
Figure 9 shows the calculated magnetization reversal
process of a rectangular permalloy thin film element
Figure 8
Detailed magnetization configuration of the 3601
domain wall of Fig. 7.
Figure 9
Simulated magnetization reversal process of a permalloy
film element of size 10 mm 5 mm and thickness 30 nm.
The gray scale represents the magnetization divergence.
An external magnetic field is applied in the element
length direction, opposite to the initial magnetization
(1) in the center of the element.
Figure 10
Magnetization vector configuration of a state during the
reversal shown in Fig. 9 and its corresponding gray scale
representation of the magnetization divergence.
758
Magnetization Reversal Dynamics
with size 10 mm 5 mm and thickness 30 nm. The di-
vergence of the magnetization is plotted in gray scale
to show the domain walls. Figure 10 shows an exam-
ple of the exact magnetization pattern corresponding
to a wall configuration shown in a gray scale plot. As
shown in Fig. 9, from frame (1) to frame (8), the
magnetization of the center of the element is com-
pletely reversed, from pointing down to pointing up.
Prior to the reversal, frame (1) in the figure, there al-
ready exist two triangular domains at the top right and
bottom left whose magnetizations are already in the
reversed (up) direction. As the reversal proceeds, these
two reversed domains expand, forcing the formation
of the diamond transverse domain in the middle of the
element and resulting in the complete flux closure do-
main configuration shown in frame (4). Continued
expansion of the two reverse domains into the entire
central area of the element eliminates the transverse
diamond domain and the reversal is thus completed.
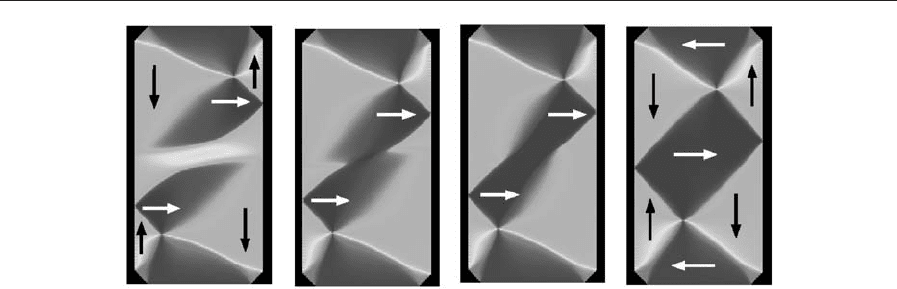
The formation of the closure domain configuration
shown in frame (4) of Fig. 9 is particularly interest-
ing. Figure 11 shows the transient magnetization
configurations from the state shown in frame (3) to
the state shown in frame (4) of Fig. 9. The connection
of the two curved domains forms the central diamond
domain in the closure domain configuration.
8. Summary
Magnetization reversal dynamics can be very compli-
cated even in ferromagnetic objects of simple geometric
shape. The discovery of the giant magnetoresistance,
the advancement of spin-dependent tunneling, and the
exploration of spin in semiconductors have sparked
recent insurgence on the development of many new
types of magnetic devices that utilize magnetic multi-
layer structures patterned into diminutive dimensions.
To facilitate the technological advancements, dynamic
micromagnetic modeling will continue to be a powerful
tool to obtain critically needed understanding of the
magnetization reversal characteristics in these devices
and structures.
See also: Longitudinal Media: Fast Switching; Mi-
cromagnetics: Basic Principles; Micromagnetics: Fi-
nite Element Approach; Magnetic Recording:
Patterned Media; Magnetic Recording Media: Parti-
culate Media, Micromagnetic Simulations
Bibliography
Bertram H N, Zhu J -G 1992 Fundamental magnetization
processes in thin-film recording media. In: Ehrenreich H,
Turnbull D (eds.) Solid State Physics. Academic Press, Vol.
46, pp. 271–371
Brown W F Jr 1978 Micromagnetics. Krieger, Huntington
Gilbert T L 1955 A lagrangian formulation of the gyromagnetic
equation of the magnetization field. Phys. Rev. 100, 1243–53
Hubert A, Scha
¨
fer R 2000 Magnetic Domains. Springer,
pp. 11–104
Kikuchi R 1956 On the minimum of magnetization reversal
time. J. Appl. Phys. 27, 1352–7
Landau L, Lifshitz E 1935 On the theory of dispersion of mag-
netic permeability in ferromagnetic bodies. Physik. Zeitsch.
D. Sowjetunion 8, 153–69
Mao C Y 2000 Micromagnetic modeling of thin film write
heads for magnetic recording. Ph.D. Dissertation, Carnegie
Mellon University, pp. 72–80
Strikman S, Treves D 1963 Micromagnetics. In: Rado G T,
Suhl H (eds.) Magnetism. Academic Press, Vol. 3, pp. 395–414
Figure 11
The transient magnetization configurations showing the dynamic formation of the closure domain pattern during the
magnetization reversal in Fig. 9. The initial (the extreme left) and the final (the extreme right frame) magnetization
states correspond to the states shown in frames (3) and (4) in Fig. 9, respectively. The spectrum of natural light is used
to represent the magnetization component in the horizontal direction, with blue indicating the magnetization pointing
to right and red to the left.
759
Magnetization Reversal Dynamics