Bhushan B. Nanotribology and Nanomechanics: An Introduction
Подождите немного. Документ загружается.


1112 B. Bhushan
The condition for the prevention of sticking is F
el
> F
ad
. By combining (20.39)
and (20.40), a requirement for the minimum distance S between structures which
will prevent sticking of the structures is given as [57]
S > 2δ = 2
4
3
W
ad
l
3
ER
3
= 2
32
3
W
ad
λ
3
E
(20.41)
The constant 2 takes into account two nearest structures. Using distance S,thefiber
density, ρ, is calculated as
ρ =
1
(S + 2R)
2
(20.42)
Equation 20.42 was then used to calculate the allowed minimum density of fibers
without sticking or bunching. In (20.41), it is shown that the minimum distance, S,
depends on both the aspect ratio λ and the elastic modulus E. A smaller aspect ratio
and higher elastic modulus allow for greater packing density. However, fibers with
a low aspect ratio and high modulus are not desirable for adhering to rough surfaces
due to lack of compliance.
20.7.4 Numerical simulation
The simulation of adhesion of an attachment system in contact with random rough
surfaces was carried out numerically. In order to conduct 2D simulations it is ne-
cessary to calculate applied load F
n
as a function of applied pressure P
n
as an input
condition.Using ρ calculated by non-stickingcondition, Kim and Bhushan [57] cal-
culated F
n
as
F
n
=
P
n
p
ρ
(20.43)
where p is the number of springs in scan length L, which equals L/(S + 2R).
Fibers of the attachment system are modeled as one-level hierarchy elastic
springs (Fig. 20.13) [57]. The deflection of each spring and the elastic force arisen
in the springs are calculated according to (20.21) and (20.22), respectively. The ad-
hesion force is the lowest value of elastic force F
el
when the fiber hasdetached from
the contacting surface. Kim and Bhushan [57] used an iterative process to obtain op-
timalfiber geometry– fiber radius and aspectratio. Ifthe appliedload, theroughness
of contacting surface and the fiber material are given, the procedure for calculating
the adhesion force is repeated iteratively until the desired adhesion force is satis-
fied. In order to simplify the design problem, fiber material is regarded as a known
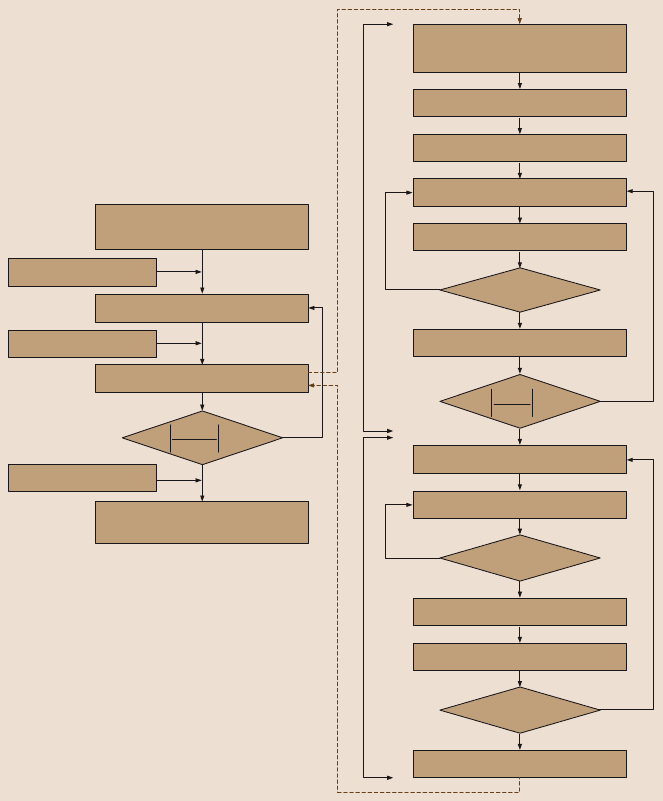
variable. The next step is constructing the design database. Figure 20.22a shows the
flow chart for the construction of adhesion design database and Fig. 20.22b shows
the calculation of the adhesion force that is a part of the procedure to construct an
adhesion design database.
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1113
Calculate F
ad
ff
i ad
≤
No
Number of contacts = 0
Calculate elastic force, F
el
Yes
Pull of loop
Calculate number of contacts
Yes
No
Calculate Δl
New spring position, h
Calculate elastic force, F
el
No
Yes
Yes
No
Calculate Δl
New spring position, h
Guess initial spring position, h
0
Rough surface height data, z
Input parameters
FRRl
,, , ,,N
tσ
σ
Δl ≤ 0
FF
F
el n
n
–
< 0.001
Press down loop
Calculation of adhesion force
No
Yes
Guess initial fiber size, R and λ
Input parameters
P
t
,,, ,E'R
σ
μ σ
μμ
μ
new
–
< 0.001
Non-buckling condition
Non-sticking condition
Non-fiber fracture condition
Construction of adhesion
design database
a)
b)
''
'
Fig. 20.22. Flow chart for (a) the construction of adhesion design database and (b) the calcu-
lation of the adhesion force. In this figure, P
n
is the applied pressure, E is the elastic modulus,
µ
is the adhesion coefficient, R
t
is the tip radius, σ is root mean square (RMS) amplitude,R
is the fiber radius, λ is the aspect ratio of fiber, F
n
is the applied load, N is the number of
springs, k and l are stiffness and length of structures, Δl is the spring deformation, f
i
is the
elastic force of a single spring and f
ad
is the adhesion force of a single contact [57]
1114 B. Bhushan
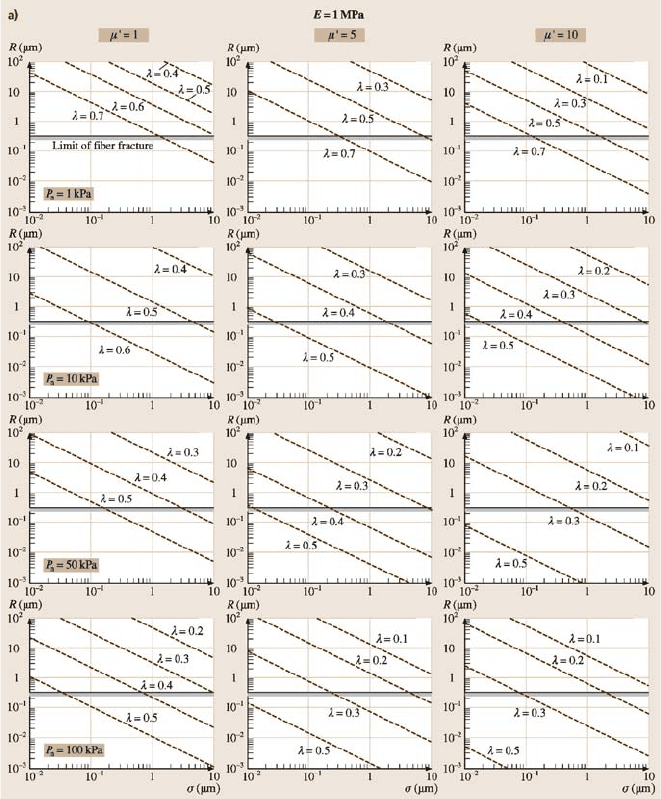
20.7.5 Results and discussion
Figure 20.23 shows an example of the adhesion design database for biomimetic at-
tachment systems consisting of single-level cylindrical fibers with orientation angle
of 30° and spherical tips of R
t
= 100nm constructed by Kim and Bhushan [57].
The minimum fiber radius calculated by non-fiber fracture condition, which plays
a role of lower limit of optimized fiber radius, is also added on the plot. The plots in
Fig. 20.22 cover all applicable fiber materials from soft elastomer material such as
poly(dimethylsiloxane)(PDMS) tostiffer polymerssuch aspolyimideand β-keratin.
The dashedlines in each plotrepresentthe limits of fiber fracturedue to the adhesion
force. For a soft material with E = 1 MPa in Fig. 20.23a, the range of the desirable
fiber radius is more than 0.3µm and that of the aspect ratio is approximately less
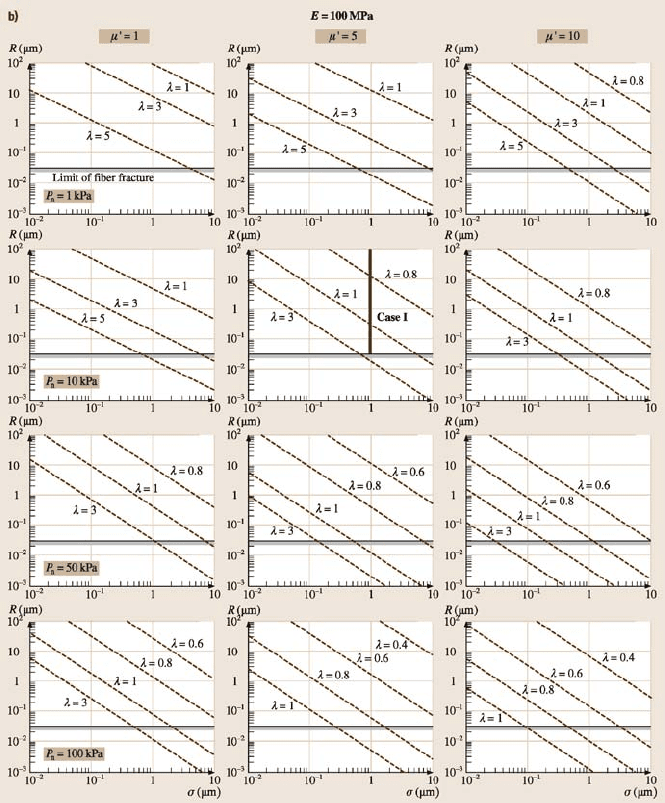
than 1. As elastic modulus increases, the feasible range of both fiber radius and as-
pect ratio also increase as shown in Fig. 20.23b and 20.23c. In Fig. 20.23, the fiber
radius has a linear relation with the surface roughness on a logarithm scale.
If the applied load, the roughness of contacting surface and the elastic modu-
lus of a fiber material are specified, the optimal fiber radius and aspect ratio for the
desired adhesion coefficient can be selected from this design database. The adhe-
sion databases are useful for understanding biological systems and for guiding the
fabrication of biomimetic attachment systems. Two case studies [57] are calculated
below.
Case study I: Select the optimal size of fibrillar adhesive for a wall climbing
robot with the following requirements:
• Material: polymer with E ≈100MPa
• Applied pressure by weight <10kPa
• Adhesion coefficient < 5
• Surface roughness σ<1 µm.
The subplot of adhesion database that satisfies the requirement is at second col-
umn and second row in Fig. 20.23b. From this subplot, any values on the marked
line can be selected to meet the requirements. For example, fiber radius of 0.4 µm
with aspect ratio of 1 or fiber radius of 10 µm with aspect ratio of 0.8 satisfies the
specified requirements.
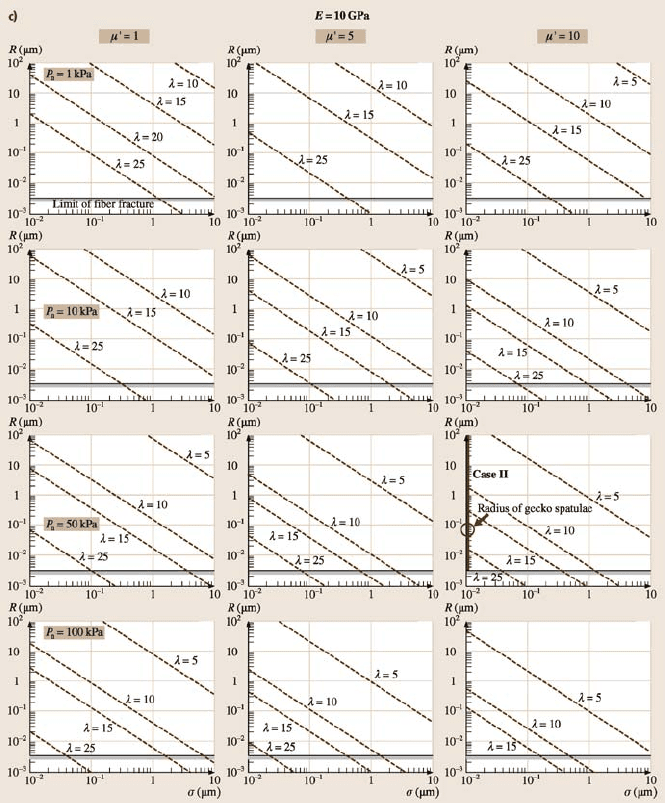
Case study II: Compare with adhesion test for a single gecko seta [6,7]:
• Material: β-keratin with E ≈10GPa
• Applied pressure = 57kPa (2.5µNonanareaof43.6µm
2
)
• Adhesion coefficient = 8to16
• Surface roughness σ<0.01µm.
Autumn et al. [6,7] showed that in isolated gecko setae contacting with surface
of a single crystalline silicon wafer, a 2.5 µN preload yielded adhesion of 20 to
40µN and thus a value of adhesion coefficient of 8 to 16. The region that satisfies
the above requirements is marked in Fig. 20.23c. The spatulae of gecko setae have
an approximate radius of 0.05µm with an aspect ratio of 25. However, the radius
corresponding to λ = 25 for the marked line is about 0.015µm. This discrepancy
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1115
Fig. 20.23. Adhesion design database for biomimetic attachment system consisting of single-
level cylindrical fibers with orientation angle of 30° and spherical tips of 100 nm for elastic
modulus of (a) 1MPa,(b) 100 MPa and (c) 10 GPa [57]. The solid lines shown in Figs. (b)
and (c) correspond to the cases I and II, respectively, which satisfy the specified requirements
1116 B. Bhushan
Fig. 20.23. (continued)
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1117
Fig. 20.23. (continued)
1118 B. Bhushan
is due to the difference between simulated fiber model and real gecko setae model.
Gecko setae are composed of three-level hierarchicalstructure in practice, so higher
adhesion can be generated than a single-level model [20,55,56]. Given the simpli-
fication in the fiber model, this simulation result is very close to the experimental
result.
20.8 Fabrication of Biomimetric Gecko Skin
On the basis of studies found in the literature, the dominant adhesion mechanism
utilized by geckos and other spider attachment systems appears to be van der Waals
forces. The complex divisions of the gecko skin (lamellae-setae-branches-spatulae)
enable a large real area of contact between the gecko skin and mating surface.
Hence, a hierarchical fibrillar micro/nanostructure is desirable for dry, superadhe-
sive tapes. The development of nanofabricated surfaces capable of replicating this
adhesion force developed in nature is limited by current fabrication methods. Many
different techniqueshavebeen used in an attempt to create [32,64,65,82,96,97]and
characterize [19,37,68] bio-inspired adhesive tapes.
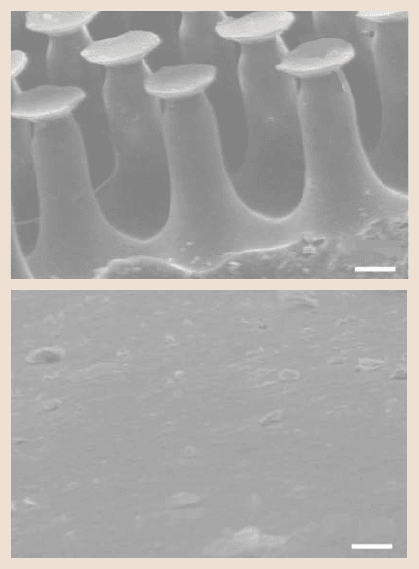
Gorb et al. [37] and Bhushan and Sayer [19] characterized two polyvinylsilox-
ane (PVS) samples from Gottlieb Binder Inc., Holzgerlingen, Germany: one con-
sisting of mushroom-shaped pillars (Fig. 20.24a) and the other sample was an un-
structured control surface (Fig. 20.24b). The structured sample is inspired by the
micropatterns found in the attachment systems of male beetles from the family
chrysomelidae,and are easier to fabricate.Both sexes possess adhesivehairs on their
tarsi, however, males bear hair extremely specialized for adhesion on the smooth
surface of female’s covering wings during mating. The hairs have broad flattened
tip with grooves under the tip to provide flexibility. The structured samples were
produced at room temperature by pouring two-compound polymerizing PVS into
the holed template lying on a smooth glass support. The fabricated sample is com-
prised of pillars that are arranged in a hexagonal order to allow maximum packing
density. They are approximately 100µm in height, 60µm in base diameter, 35µm
in middle diameter and 25 µm in diameter at the narrowed region just below the
terminal contact plates. These plates were of about 40µm in diameter and 2µ min
thickness at the lip edges. The adhesion force of the two samples in contact with
a smooth flat glass substrate was measured by Gorb et al. [37] using a home-made
microtribometer. Results revealed that the structured specimens featured an adhe-
sion force more than twice that of the unstructured specimens. The adhesion force
was also found to be independentof the preload. Moreover, it was found that the ad-
hesive force of the structured sample was more tolerant to contamination compared
to the control and it could be easily cleaned with a soap solution.
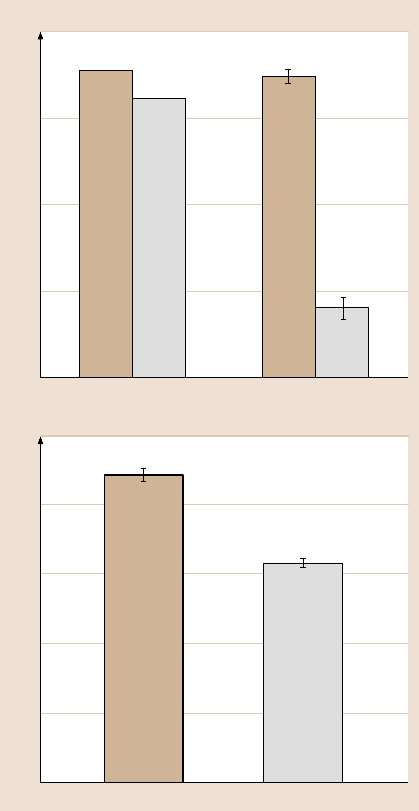
Bhushan and Sayer [19] characterized the surface roughness, friction force, and
contact angle of the structured sample and compared the results to an unstructured
control.As shown in Fig. 20.25a, the macroscalecoefficient of kinetic friction of the
structured sample was found to be almost four times greater than the unstructured
sample. This increase was determined to be a result of the structured roughness
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1119
LP
50 mμ
50 mμ
NR
SH
a)
b)
Fig. 20.24. SEM micrographs
of the (a) structured and (b)
unstructured PVS samples.
SH: shaft, NR: neck region,
LP: lip [19]
of the sample and not the random nanoroughness. It is also noteworthy that the
static and kinetic coefficients of friction are approximately equal for the structured
sample. It is believed that the divided contacts allow the broken contacts of the
structured sample to constantly recreate contact. As seen in Fig. 20.25b, the pillars
also increased the hydrophobicity of the structured sample in comparison to the
unstructuredsample as expecteddue to increasedsurfaceroughness [22,92].A large
contact angle is important for self cleaning [10], which agrees with the findings of
Gorb et al. [37] that the structured sample is more tolerant of contamination than
the unstructured sample.
20.8.1 Single Level Hierarchical Structures
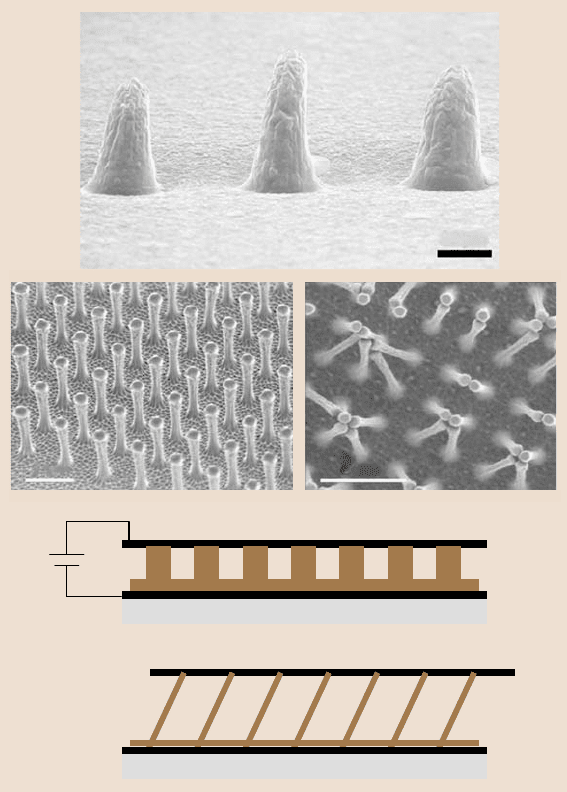
Oneof the simplestapproachesto create asingle levelhierarchicalsurfaceemployed
an AFM tip to create a set of dimples on a wax surface. These dimples served as
a mold for creating polymer nanopyramidsshown in Fig. 20.26a[82]. The adhesive
force to an individual pyramid was measured using another AFM cantilever. The
force was found to be about 200 µN. Although each pyramid of the material is
capable of producing large adhesive forces, the surface failed to replicate gecko
adhesion on a macroscale. This was due to the lack of flexibility in the pyramids. In
1120 B. Bhushan
0
150
b) Contact angle (deg)
Structured
30
60
90
120
0
4
a) Coefficient of friction
Static friction
1
2
3
Kinetic friction
Unstructured
Structured Unstructured
Fig. 20.25. (a) Coefficients of
static and kinetic friction for
the structured and unstruc-
tured samples slid against
magnetic tape with a normal
load of 130 mN.
(b) Water contact angle for
the structured and unstruc-
tured samples [19]
order to ensure that the largest possible area of contact occurs between the tape and
mating surface, a soft, compliant fibrillar structure would be desired [52]. As shown
in previouscalculations, the van der Waals adhesiveforce for two parallel surfaces is
inversely proportional to the cube of the distance between two surfaces. Compliant
fibrillar structures enable more fibrils to be in close proximity of a mating surface,
thus increasing van der Waals forces.
Geim et al. [32] created arrays of nanohairs using electron-beam lithography
and dry etching in oxygen plasma (Fig. 20.26b (left)). The original arrays were
created on a rigid silicon wafer. This design was only capable of creating 0.01N
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1121
V
10 mμ
2 mμ 2 μm
a)
b)
c)
Fig. 20.26. SEM micrographs of (a) three pillars created by nano-tip indentation [81],
(b) (left) an array of polyimide nanohairs and (right) bunching of the nanohairs, which leads
to a reduction in adhesive force [32], and (c) directed self-assembly based method of produc-
ing high aspect ratio micro/nanohairs [81]
of adhesive force for a 1 cm
2
patch. The nanohairs were then transferred from the
silicon wafer to a soft polymer substrate. A 1 cm
2
samplewasabletocreate3N
of adhesive force under the new arrangement. This is approximately one-third the
adhesive strength of a gecko. The fabricated a Spiderman toy (about 0.4N) with
a hand covered with molded polymer nanohairs, Fig. 20.27. The demonstrated that