Bhushan B. Nanotribology and Nanomechanics: An Introduction
Подождите немного. Документ загружается.


1092 B. Bhushan
20.5.4 Effects of Hydrophobicity
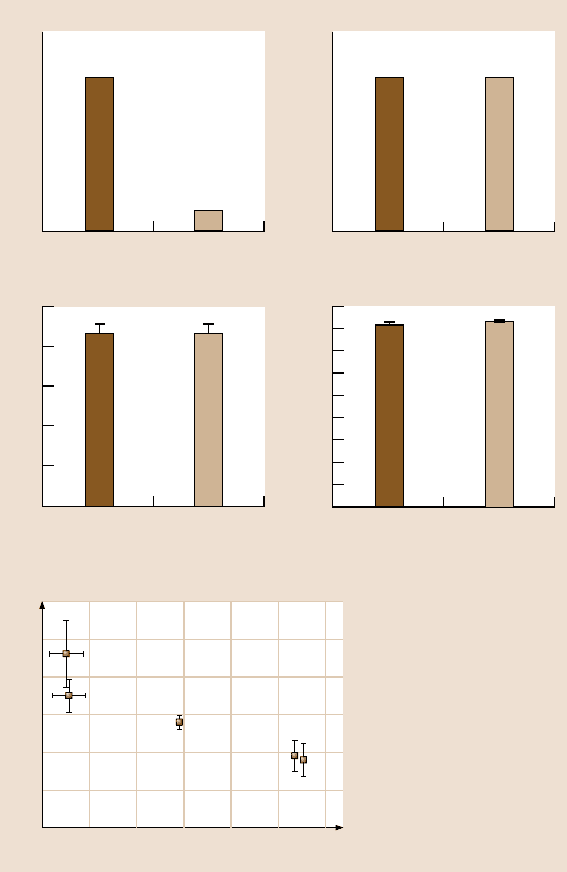
To further test the hypothesis capillary forces, plays a role in gecko adhesion, the
spatular pull-off force was determined for contact with both hydrophilic and hy-
drophobic surfaces. As seen in Fig. 20.12a, the capillary adhesion theory predicts
that agecko spatulawill generatea greater adhesionforce when in contactwith a hy-
drophilic surface as compared to a hydrophobicsurface while the van der Waals ad-
hesion theory predicts that the adhesion force between a gecko spatula and a surface
will be the same regardless of the hydrophobicity of the surface [7]. Figure 20.12b
shows the shear stress of a whole gecko and adhesive force of a single seta on hy-
drophilic and hydrophobic surfaces. The data shows that the adhesion values are the
same on both surfaces. This supports the van der Waals prediction of Fig. 20.12a.
Huber et al. [47] found that the hydrophobicity of the attachment surface had an ef-
fect on the adhesion force of a single gecko spatula as shown in Fig. 20.12c. These
results show that adhesion force has a finite value for superhydrophobicsurface and
increases as the surface becomes hydrophilic. It is concluded that van der Waals
forces are the primary mechanism and capillary forces further increase the adhesion
force generated.
20.6 Adhesion Modeling
With regard to the natural living conditions of the animals, the mechanics of gecko
attachment can be separated into two parts: the mechanics of adhesion of a single
contact with a flat surface, and an adaptation of a large number of spatulae to a nat-
ural, rough surface. Modeling of the mechanics of adhesion of spatulae to a smooth
surface, in the absence of meniscus formation, was developed by Autumn et al. [7],
Jagota and Bennison[52] andArzt et al. [3].As discussed previouslyin Sect. 20.3.2,
the adhesion force of multiple contacts F
ad
can be increased by dividing the con-
tact into a large number (n) of small contacts, while the nominal area of the contact
remains the same, F
ad
∼
√
nF
ad
. However, this model only considers contact with
a flat surface. On natural, rough surfaces, the compliance and adaptability of setae
are the primary sources of high adhesion. As stated earlier, the hierarchical struc-
ture of gecko setae allows for a greater contact with a natural, rough surface than
a non-branched attachment system [82].
20.6.1 Spring Model
Bhushan et al. [20] and Kim and Bhushan [55–58] have recently approximated
a gecko seta in contact with random rough surfaces using a hierarchical spring
model. Each level of springs in their model corresponds to a level of seta hierar-
chy. The upper level of springs corresponds to the thicker part of gecko seta, the
middle spring level corresponds to the branches, and the lower level of springs cor-
responds to the spatulae. The upper level is the thickest branch of the seta. It is
75µm in length and 5µm in diameter. The middle level, referred to as a branch,
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1093
Contact angle (deg)
20
0
24
Adhesive force (nN)
0
Capillary adhesion prediction
c) Results supporting capillary forces
40 60 80 100 120
4
8
12
16
20
N-phil
Hydrophilic
SiO
2
Hydrophilic
van der Waals adhesion prediction
Shear stress (N/mm )
2
b) Results supporting van der Waals forces
a)
Hydrophobic Hydrophilic Hydrophobic
Hydrophobic
GaS
Hydrophilic
SiO
2
Hydrophobic
Si
T-phil
Glass
N-phob
T-phob
Adhesive force ( N)μ
Whole
gecko
data
Single
seta
data
0
10
20
30
40
0
0.05
0.10
0.15
0.20
0.25
Fig. 20.12. (a) Capillary and van der Waals adhesion predictions for the relative magnitude
of the adhesive force of gecko setae with hydrophilic and hydrophobic surfaces [7]. (b) Re-
sults of adhesion testing for a whole gecko (left) and single seta (right) with hydrophilic and
hydrophobic surfaces [7] and (c) results of adhesive force testing of a single gecko spatula
with surfaces with different contact angles [47]

1094 B. Bhushan
has a length of 25µm and diameter of 1 µm. The lower level, called a spatula, is the
thinnest branchwith a length of 2.5µm and a diameter of about 0.1µm (Table 20.2).
Autumn et al. [6] showed that the optimal attachment angle between the substrate
and a gecko seta is 30° in the single seta pull-off experiment. This finding is sup-
ported by the adhesion models of setae as cantilever beams [31,79] (see Sect. 20.3.3
for more details). Therefore, θ was fixed at 30° in the studies [20,55–58].
20.6.2 Single Spring Contact Analysis
In their analysis, Bhushan et al. [20] and Kim and Bhushan [55–58] assumed the
tip of the spatula in a single contact to be spherical. The springs on every level
of hierarchy have the same stiffness as the bending stiffness of the corresponding
branches of seta. If the beam is orientedat an angle θ to the substrate and the contact
load F is aligned normal to the substrate, its components along and tangential to
the direction of the beam, Fcosθ and Fsinθ, give rise to bending and compressive
deformations, δ
b
and δ
c
, respectively, as [95]
δ
b
=
Fcosθl
3
m
3EI
,δ
c
=
Fsinθl
m
A
C
E
(20.16)
where, I = πR
4
m
/4andA
C
= πR
2
m
are the moments of inertia of the beam and the
cross-sectional area, respectively, and l
m
and R
m
are the length and the radius of
seta branches, respectively, and m is the level number. The net displacement, δ
⊥
normal to the substrate is given by
δ
⊥
= δ
c
sinθ + δ
b
cosθ. (20.17)
Using (20.16) and (20.17), the stiffness of seta branches, k
m
, is calculated as [34].
k
m
=
πR
2
m
E
l
m
sin
2
θ
1+
4l
2
m
cot
2
θ
3R
2
m
(20.18)
For an assumed elastic modulus, E, of seta material of 10GPa with a load applied at
an angle of 60° to spatulae long axis, Kim and Bhushan [55] calculated the stiffness
of every level of seta as given in Table 20.3.
In the model, both tips of a spatula and asperity summits of the rough surface
are assumed to be spherical with a constant radius [20]. As a result, a single spatula
adhering to a rough surface was modeled as the interaction between two spherical
tips. Because β-keratin has a high elastic modulus [12, 75], the adhesion force be-
tween two round tips was calculated according to the Derjaguin–Muller–Toporov
(DMT) theory [26] as
F
ad
= 2πR
c
W
ad
(20.19)
where R
c
is thereduced radiusof contact,which is calculatedas R
c
=
(
1/R
1
+ 1/R
2
)
−1
;
R
1
,R
2
– radii of contacting surfaces; R
1
= R
2
, R
c
= R/2. The work of adhesion, W
ad
,
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1095
Table 20.3. Geometrical size, calculated stiffness and typical densities of branches of seta for
Tokay gecko (Kim and Bhushan, 2007a)
Level of seta Length
(µm)
Diameter
(µm)
Bending
stiffness
1
(N/m)
Typical density
(#/mm
2
)
III upper 75 5 2.908 14×10
3
II middle 25 1 0.126 –
I lower 2.5 0.1 0.0126 1.4–14 × 10
6
1
for elastic modulus of 10 GPa with load applied at 60° to spatula long axis
is then calculated using the following equation for two flat surfaces separated by
a distance D [50].
W
ad
= −
H
12πD
2
(20.20)
where H is the Hamakar constant which depends on the medium between the two
surfaces. Typical values of the Hamakar constant for polymers are H
air
= 10
−19
J
in the air and H
water
= 3.7×10
−20
J in the water [50]. For a gecko seta, which is
composed of β-keratin, the value of H isassumedtobe10
−19
J. The works of
adhesion of two surfaces in contact separated by an atomic distance D ≈ 0.2nmis
approximately equal to 66mJ/m
2
[50]. By assuming that the tip radius, R,is50nm,
using (20.19), the adhesion force of a single contact is calculated as 10 nN [55].
This value is identical to the adhesion force of a single spatula measured by Huber
et al. [46]. This adhesion force is used as a critical force in the model for judging
whether the contact between the tip and the surface is broken or not during pull-off
cycle [20]. If the elastic force of a single spring is less than the adhesion force, the
spring is regarded as having been detached.
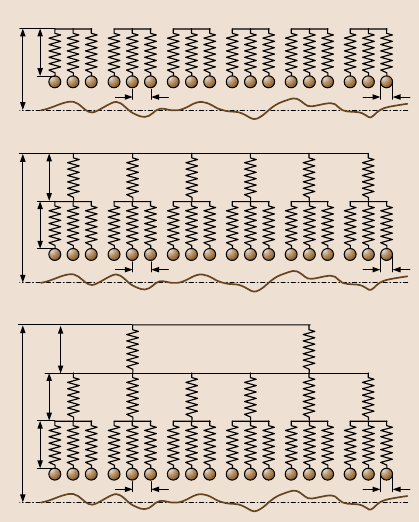
20.6.3 The Multi-Level Hierarchical Spring Analysis
hierarchical levels in the attachment system on attachment ability, models with one-
[20, 55, 56], two- [20, 55, 56] and three- [55, 56] levels of hierarchy were simu-
lated (Fig. 20.13). The one-level model has springs with length l
I
= 2.5µmand
stiffness k
I
= 0.0126N/m. The length and stiffness of the springs in the two-level
model are l
I
= 2.5µm,k
I
= 0.0126N/m and l
II
= 25µm, k
II
= 0.126N/m for lev-
els I and II, respectively. The three-level model has additional upper level springs
with l
III
= 75µm, k
III
= 2.908N/m on the springs of the two-level model, which is
identical to gecko setae. The base of the springs and the connecting plate between
the levels are assumed to be rigid. The distance S
I
between neighboring structures
of level I is 0.35µm, obtained from the average value of measured spatula density,
8×10
6
mm
−2
, calculated by multiplying 14,000setae/mm
2
by anaverageof 550 spat-
ula/seta [77] (Table 20.3). A 1 : 10 proportion of the number of springs in the upper
level to that in the level below was assumed [20]. This corresoponds to one spring
1096 B. Bhushan
One-level hierarchy
l
I
h
S
1
2R
k
I
Two-level hierarchy
l
I
h
S
1
2R
k
I
l
II
k
II
Three-level hierarchy
l
I
h
S
1
2R
k
I
l
II
k
II
l
III
k
III
Fig. 20.13. One-, two- and
three-level hierarchical spring
models for simulating the ef-
fect of hierarchical morphol-
ogy on interaction of a seta
with a rough surface. In this
figure, l
I,II,III
are lengths of
structures, s
I
is space be-
tween spatulae, k
I,II,III
are
stiffnesses of structures, I, II
and III are level indexes, R is
radius of tip, and h is distance
between upper spring base of
each model and mean line of
the rough profile [55]
at level III is connected to ten springs on level II and each spring on level II also
has ten springs on level I. The number of springs on level I considered in the model
is calculated by dividing the scan length (2000µm) with the distance S
I
(0.35µm),
which corresponds to 5700.
The spring deflection Δl was calculated as
Δl = h−l
0
−z , (20.21)
where h is the positionof the spring base relative to the mean line of surface; l
0
is the
total length of a spring structure which is l
0
= l
I
for the one-level model, l
0
= l
I
+ l
II
for thetwo-levelmodel, andl
0
= l
I
+l
II
+l
III
for the three-levelmodel; and z is profile
height of the rough surface. The elastic force F
el
arisen in the springs at a distance
h from the surface was calculated for the one-level model as [20]
F
el
= −k
I
p
i=1
Δl
i
u
i
u
i
=
1 if contact
0 if no contact
(20.22)
where p is the number of springs in the level I of the model. For the two-level model
the elastic force was calculated as [20]
F
el
= −
q
j=1
p
i=1
k
ji
(Δl
ji
−Δl
j
)u
ji
u
ji
=
1 if contact
0 if no contact
(20.23)

20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1097
where q is the number of springs in the level II of the model. For the three-level
model the elastic force was calculated as [55]
F
el
= −
r
k=1
q
j=1
p
i=1
k
kji
(Δl
kji
−Δl
kj
−Δl
j
)u
kji
u
kji
=
1 if contact
0 if no contact
(20.24)
where r is the number of springs in the level III of the model. The spring force when
the springs approach the rough surface is calculated using either (20.22), (20.23),
or (20.24) for one-, two- and three-level models, respectively. During pull-off,the
same equations are used to calculate the spring force. However, when the applied
load is equal to zero, the springs do not detach due to adhesion attraction given
by (20.19). The springs are pulled apart until the net force (pull-off force minus
attractive adhesion force) at the interface is equal to zero.
The adhesion force is the lowest value of elastic force F
el
when the seta has
detached from the contacting surface. The adhesion energy is calculated as
W
ad
=
∞
D
F
el
(
D
)
dD (20.25)
where D is the distancethat the springbase movesawayfrom the contactingsurface.
The lower limit of the distance
D is the value of D where F
el
is first zero when the
model is pulled away from the contacting surface. Also although the upper limit of
the distance is infinity, in practice, the F
el
(D) curve is integrated to and upper limit
where F
el
increases from a negative valueto zero. Figure 20.14shows the flow chart
for the calculation of the adhesion force and the adhesion energy employed by Kim
and Bhushan [55].
The random rough surfaces used in the simulations were generated by a com-
puter program [14,15]. Two-dimensional profiles of surfaces that a gecko may en-
counter were obtained using a stylus profiler [20]. These profiles along with the
surface selection methods and surface roughness parameters (root mean square
(RMS) amplitude σ and correlation length β
∗
) for scan lengths of 80, 400, and
2000µm are presented in Appendix 20.A. The roughness parameters are scale
dependent, and, therefore, adhesion values also are expected to be scale depen-
dent. As the scan length was increased, the measured values of RMS amplitude
and correlation length both increased. The range of values of σ from 0.01µmto
30µm and a fixed value of β
∗
= 200µm were used for modeling the contact of
a seta with random rough surfaces. The chosen range covers values of roughnesses
for relatively smooth, artificial surfaces to natural, rough surfaces. A typical scan
length of 2000µm was also chosen which is comparable to a lamella length of
gecko.

1098 B. Bhushan
Calculate F, E
ad ad
ff
iad
≤
No
Number of contacts = 0
Calculate elastic force, F
el
Yes
Pull off loop
Calculate number of contacts
Yes
No
Calculate , ,ΔΔΔlll
kji kj k
New spring position, h
Calculate elastic force, F
el
No
Yes
Yes
No
Calculate Δl
kji
New spring position, h
Guess initial spring position, h
0
Rough surface height data, z
Input parameters
Fk k k NN N l l l
n I II III I II III I II III
,, , , , , ,, ,
Δl
kji
≤ 0
FF
F
el n
n
–
< 0.001
Press down loop
Fig. 20.14. Flow chart for the
calculation of the adhesion
force (F
ad
) and the adhesion
energy (E
ad
) for three-level
hierarchical spring model. In
this figure, F
n
is an applied
load, k
I, II, III
and l
I, II, III
are
stiffnesses and lengths of
structures, Δl
kji
, Δl
ki
and Δl
k
are the spring deformations
on level I, II and III, respec-
tively, i, j and k are spring
indexes on each level, f
i
is
the elastic force of a single
spring and f
ad
is the adhesion
force of a single contact [55]
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1099
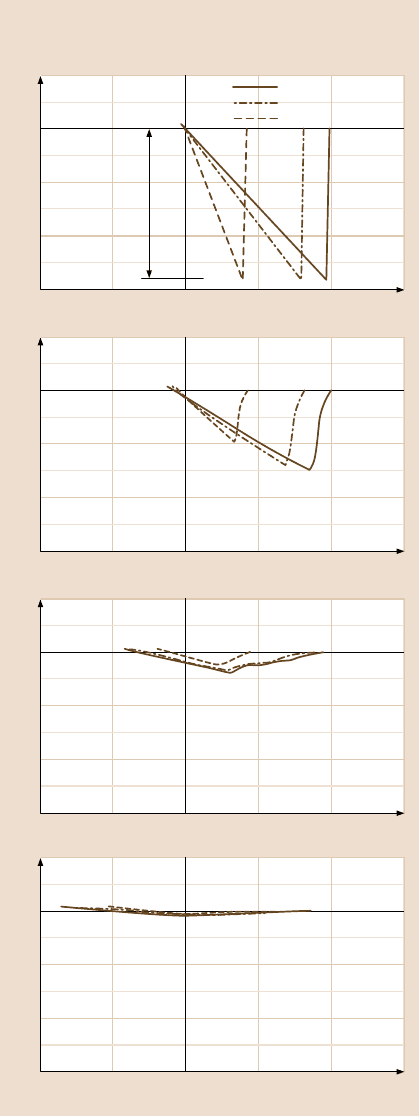
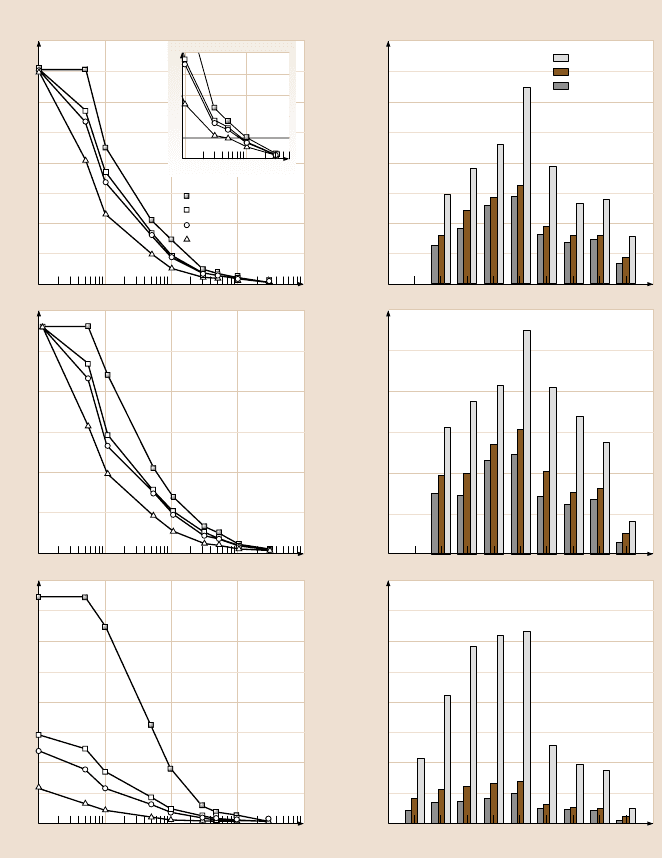
20.6.4 Adhesion Results of the Multi-level Hierarchical Spring Model
by Kim and Bhushan [55]. The obtained varioususeful results and will be presented
next. Figure 20.15a shows the calculated spring force–distance curves for the one-,
two- and three-level hierarchical models in contact with rough surfaces of different
values of root mean square (RMS) amplitude σ anging from σ0.01µmtoσ10µm
at an applied load of 1.6µN which was derived from the gecko’s weight. When the
springmodel is pressedagainstthe roughsurface,contact betweenthe springand the
rough surface occurs at point A; as the spring tip presses into the contactingsurface,
the force increases up to point B, B
or B
. During pull off, the spring relaxes, and
the spring force passes an equilibrium state (0 N); tips break free of adhesion forces
at point C, C
or C
as the spring moves away from the surface. The perpendicular
distance from C, C
or C
to zero is the adhesion force. Adhesion energy stored
during contact can be obtained by calculating the area of the triangle during the
unloading part of the curves (20.25).
Using the spring force-distance curves, Kim and Bhushan [55] calculated the
adhesion coefficient, the number of contacts per unit length and the adhesion en-
ergy per unit length of the one-, two- and three-level models for an applied load of
1.6 µN and a wide range of RMS roughness as seen in the left graphs of Fig. 20.15b.
The adhesion coefficient, defined as the ratio of pull-off force to applied preload,
represents the strength of adhesion with respect to the preload. For the applied load
of 1.6µN, which corresponds to the weight of a gecko, the maximum adhesion co-
efficient is about 36 when σ is smaller than 0.01µm. This means that a gecko can
generate enough adhesion force to support 36 times its bodyweight. However, if σ
is increased to 1 µm, the adhesion coefficient for the three-level model is reduced
to 4.7. It is noteworthy that the adhesion coefficient falls below 1 when the con-
tacting surface has an RMS roughness σ greater than 10µm. This implies that the
attachment system is no longer capable of supporting the gecko’s weight. Autumn
et al. [6,7] showedthat in isolated gecko setae contactingwith the surface of a single
crystalline silicon wafer, a 2.5µN preload yielded adhesion of 20 to 40µN and thus
a value of adhesion coefficient of 8 to 16, which supports the simulation results of
Kim and Bhushan [55].
Figure 20.15b (top left) shows that the adhesion coefficient for the two-level
model is lower than that for the three-level model, but there is only a small differ-
ence between the adhesion forces between the two- and three-levelmodels, because
the stiffness of level III for the three-level model is calculated to be higher com-
pared to those of levels I and II. In order to show the effect of stiffness, the results
for the three-level model with springs in level III of which the stiffness is 10 times
smaller than that of original level III springs are plotted. It can be seen that the
three-level model with a third level stiffness of 0.1 k
III
has a 20–30% higher ad-
hesion coefficient than the three-level model. The results also show that the trends
in the number of contacts are similar to that of the adhesive force. The study also
investigated the effect of σn adhesion energy. It was determined that the adhesion
energy decreased with an increase of σ. For the smooth surface with σ0.01µm, the
adhesion energies for the two- and three-level hierarchical models are 2 times and
1100 B. Bhushan
Distance ( )mμ
–60
20
–2 –1
0123
–40
–20
0
–60
20
–2 –1
0123
–40
–20
0
–60
20
–2 –1
0123
–40
–20
0
–60
20
Spring force ( N)μ
–2 –1
0123
–40
–20
0
= 0.01 mσ μ
= 0.1 mσ μ
=1 mσ μ
=10 mσ μ
The effect of multi-level hierachical structure
B’’
F
n
= 1.6 m * = 200 mμμ, β
B’ B
C’’ C’ C
a)
One-level
Two-level
Three-level
F
n
A
Fig. 20.15. (a) Force-distance
curves of one-, two- and
three-level models in contact
with rough surfaces with
different σ values for an
applied load of 1.6 µN
20 Gecko Feet: Natural Hairy Attachment Systems for Smart Adhesion 1101
10
2
0
80
Adhesion energy per unit length (×10 J/mm)
–12
10110
–1
10
–2
σ ( m)μ
Three-level
Two-level
One-level
The effect of multi-level hierachical structure
F
n
= 1.6 m * = 200 mμμ, β
b)
20
40
60
0
2000
Relative increase of adhesion energy (%)
50.01
σ ( m)μ
500
1000
1500
0.05 0.1 0.5 1 3 10 30
0
3000
Number of contacts per unit length (mm )
–1
1000
2000
0
Relative increase of contact numbers (%)
50
100
150
0
40
Adhesion coefficient ( )FF
ad n
,
Three-level (0.1 )k
III
Three-level ( )k
III
Two-level
One-level
10
20
30
0
200
Relative increase of adhesion coefficient (%)
50
100
150
1
2
3
4
5
0
110
Fig. 20.15. (continued) (b) The adhesion coefficient, the number of contacts and the adhesion
energy per unit length of profile for one- and multi-level models with an increase of σ value
(left figures), and relative increases between multi- and one -level models (right side)foran
applied load of 1.6 µN. The value of k
III
in the analysis is 2.908 N/m [55]