Beer F.P., Johnston E.R., DeWolf J.T., Mazurek D.F. Mechanics of Materials
Подождите немного. Документ загружается.

Apago PDF Enhancer
207
Problems
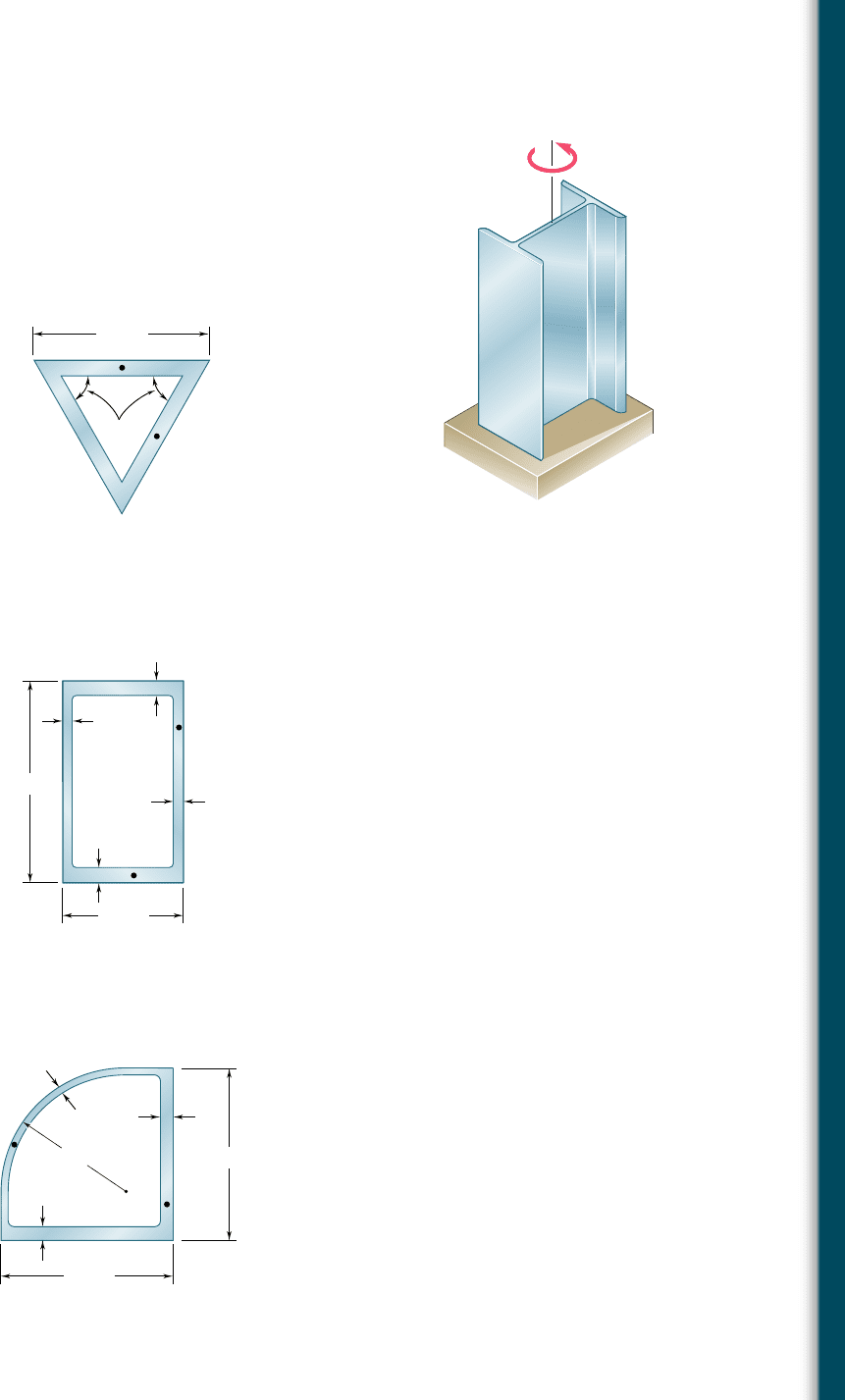
3.138 A 4-m-long steel member has a W310 3 60 cross section. Knowing
that G 5 77.2 GPa and that the allowable shearing stress is 40 MPa,
determine (a) the largest torque T that can be applied, (b) the cor-
responding angle of twist. Refer to Appendix C for the dimensions
of the cross section and neglect the effect of stress concentrations.
(See hint of Prob. 3.137.)
3.139 A torque T 5 750 kN ? m is applied to the hollow shaft shown that
has a uniform 8-mm wall thickness. Neglecting the effect of stress
concentrations, determine the shearing stress at points a and b.
T
W
310 60
Fig. P3.138
90 mm
60
a
b
Fig. P3.139
3.140 A torque T 5 5 kN ? m is applied to a hollow shaft having the
cross section shown. Neglecting the effect of stress concentrations,
determine the shearing stress at points a and b.
a
b
125 mm
6 mm
10 mm
75 mm
10 mm
6 mm
Fig. P3.140
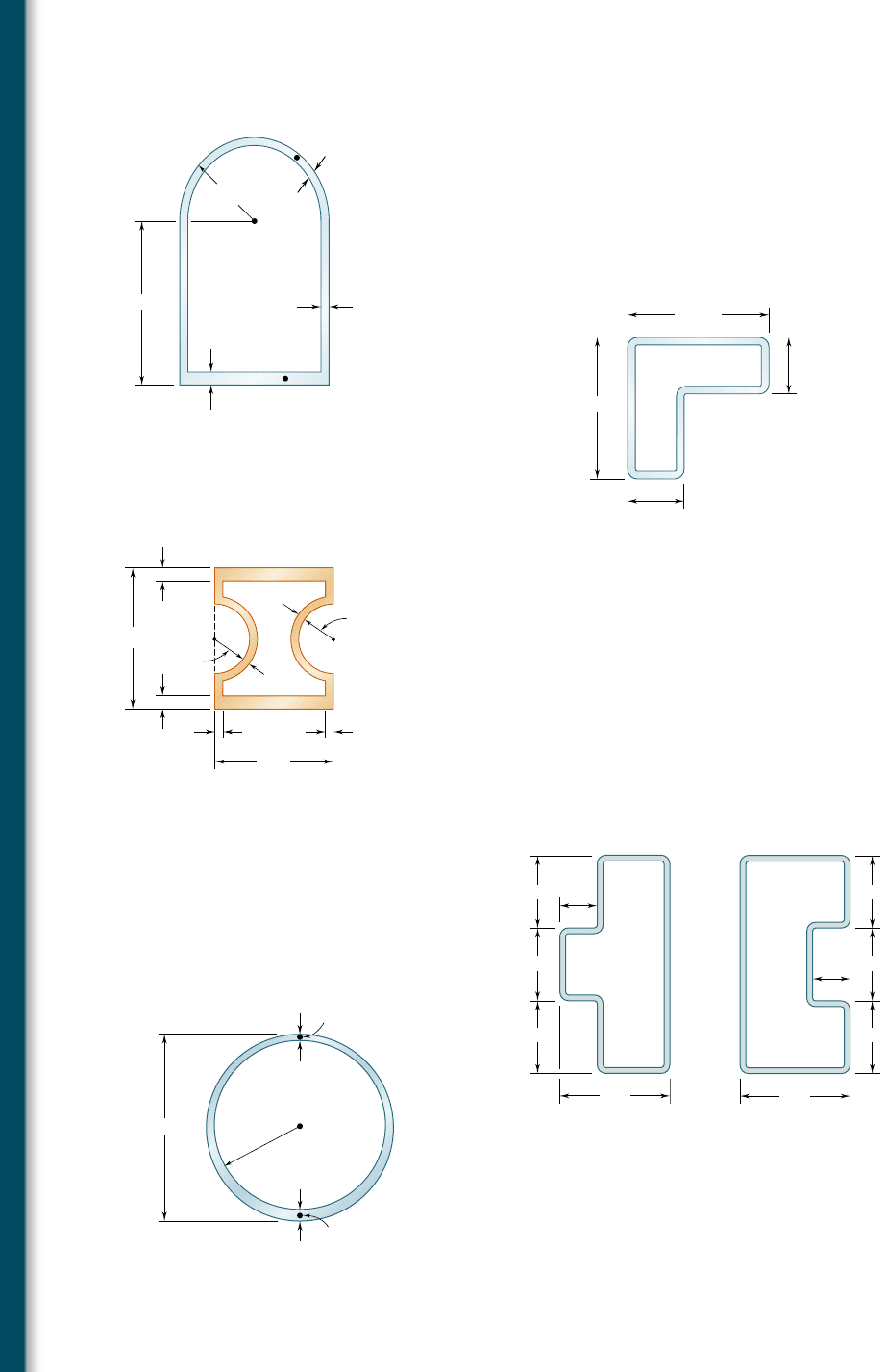
b
40 mm
2 mm
4 mm
a
4 mm
55 mm
55 mm
Fig. P3.141
3.141 A 90-N ? m torque is applied to a hollow shaft having the cross
section shown. Neglecting the effect of stress concentrations,
determine the shearing stress at points a and b.
bee80288_ch03_140-219.indd Page 207 9/21/10 3:09:47 PM user-f499bee80288_ch03_140-219.indd Page 207 9/21/10 3:09:47 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
208
Torsion
3.142 A 5.6 kN ? m-torque is applied to a hollow shaft having the cross
section shown. Neglecting the effect of stress concentrations,
determine the shearing stress at points a and b.
3.143 A hollow member having the cross section shown is formed from
sheet metal of 2-mm thickness. Knowing that the shearing stress
must not exceed 3 MPa, determine the largest torque that can be
applied to the member.
100 mm
8 mm
5 mm
5 mm
50 mm
a
b
Fig. P3.142
20 mm
20 mm
50 mm
50 mm
Fig. P3.143
3.144 A hollow brass shaft has the cross section shown. Knowing that the
shearing stress must not exceed 12 ksi and neglecting the effect of
stress concentrations, determine the largest torque that can be
applied to the shaft.
3.145 and 3.146 A hollow member having the cross section shown
is to be formed from sheet metal of 0.06-in. thickness. Knowing
that a 1250 lb ? in.-torque will be applied to the member, deter-
mine the smallest dimension d that can be used if the shearing
stress is not to exceed 750 psi.
0.5 in.
5 in.
0.2 in.
0.2 in.
0.2 in.
0.2 in.
0.5 in.
6 in.
1.5 in.
1.5 in.
Fig. P3.144
2 in.
d
2 in.
2 in.
3 in.
Fig. P3.145
2 in.
2 in.
2 in.
d
3 in.
Fig. P3.146
3.147 A hollow cylindrical shaft was designed to have a uniform wall
thickness of 0.1 in. Defective fabrication, however, resulted in the
shaft having the cross section shown. Knowing that a 15 kip ? in.-
torque is applied to the shaft, determine the shearing stresses at
points a and b.
1.1 in.
0.12 in.
0.08 in.
2.4 in.
a
b
Fig. P3.147
bee80288_ch03_140-219.indd Page 208 9/21/10 3:09:56 PM user-f499bee80288_ch03_140-219.indd Page 208 9/21/10 3:09:56 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
209
Problems
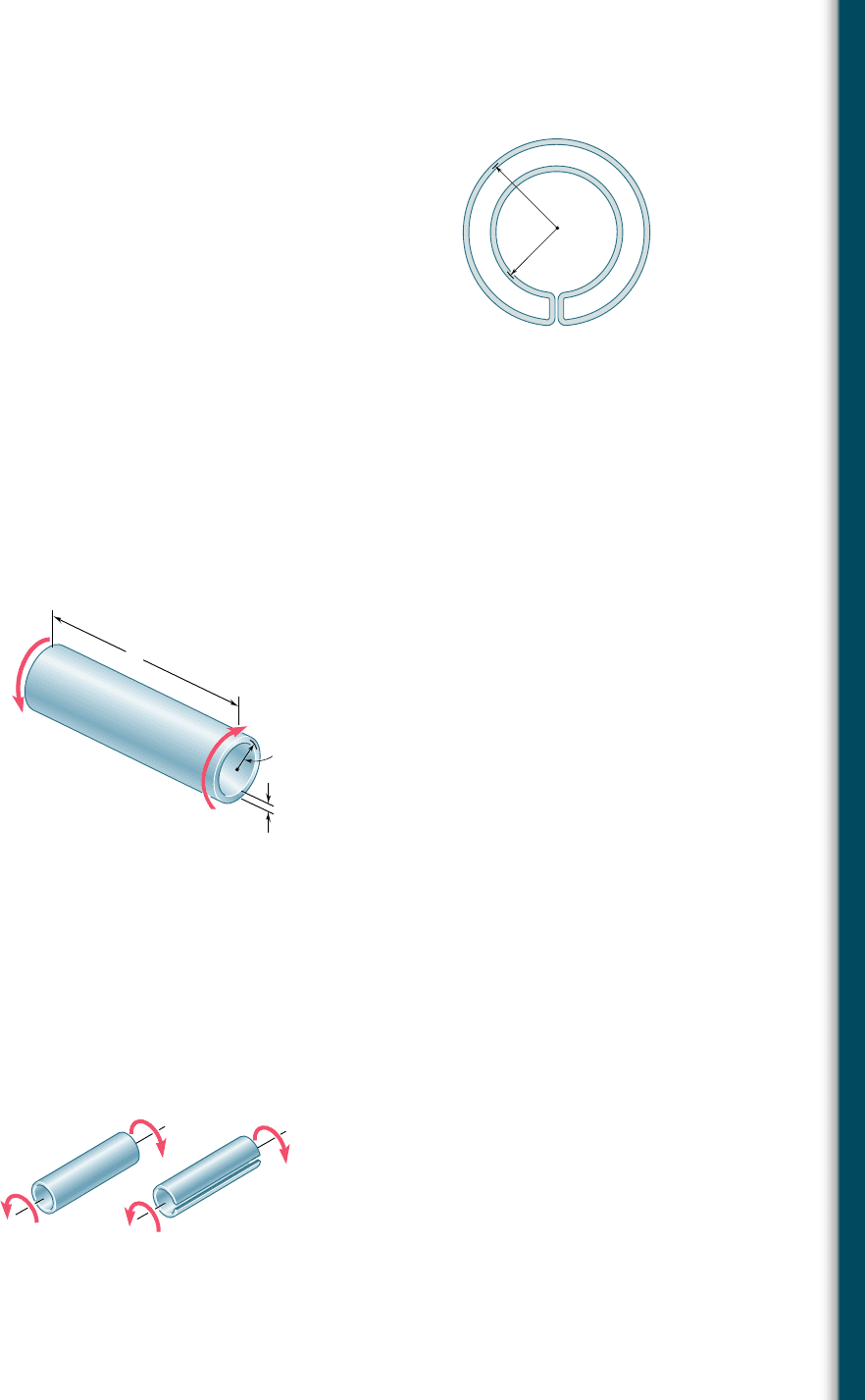
3.148 A cooling tube having the cross section shown is formed from a
sheet of stainless steel of 3-mm thickness. The radii c
1
5 150 mm
and c
2
5 100 mm are measured to the center line of the sheet
metal. Knowing that a torque of magnitude T 5 3 kN ? m is applied
to the tube, determine (a) the maximum shearing stress in the
tube, (b) the magnitude of the torque carried by the outer circular
shell. Neglect the dimension of the small opening where the outer
and inner shells are connected.
3.149 A hollow cylindrical shaft of length L, mean radius c
m
, and uni-
form thickness t is subjected to a torque of magnitude T. Con-
sider, on the one hand, the values of the average shearing stress
t
ave
and the angle of twist f obtained from the elastic torsion
formulas developed in Secs. 3.4 and 3.5 and, on the other hand,
the corresponding values obtained from the formulas developed
in Sec. 3.13 for thin-walled shafts. (a) Show that the relative error
introduced by using the thin-walled-shaft formulas rather than the
elastic torsion formulas is the same for t
ave
and f and that the rela-
tive error is positive and proportional to the ratio tyc
m
. (b) Compare
the percent error corresponding to values of the ratio tyc
m
of 0.1,
0.2, and 0.4.
c
1
O
c
2
Fig. P3.148
L
t
c
m
T
T'
Fig. P3.149
3.150 Equal torques are applied to thin-walled tubes of the same length
L, same thickness t, and same radius c. One of the tubes has been
slit lengthwise as shown. Determine (a) the ratio t
b
yt
a
of the maxi-
mum shearing stresses in the tubes, (b) the ratio f
b
yf
a
of the
angles of twist of the tubes.
T
T
T'
T'
(a)
(b)
Fig. P3.150
bee80288_ch03_140-219.indd Page 209 9/21/10 3:10:06 PM user-f499bee80288_ch03_140-219.indd Page 209 9/21/10 3:10:06 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
210
REVIEW AND SUMMARY
This chapter was devoted to the analysis and design of shafts sub-
jected to twisting couples, or torques. Except for the last two sections
of the chapter, our discussion was limited to circular shafts.
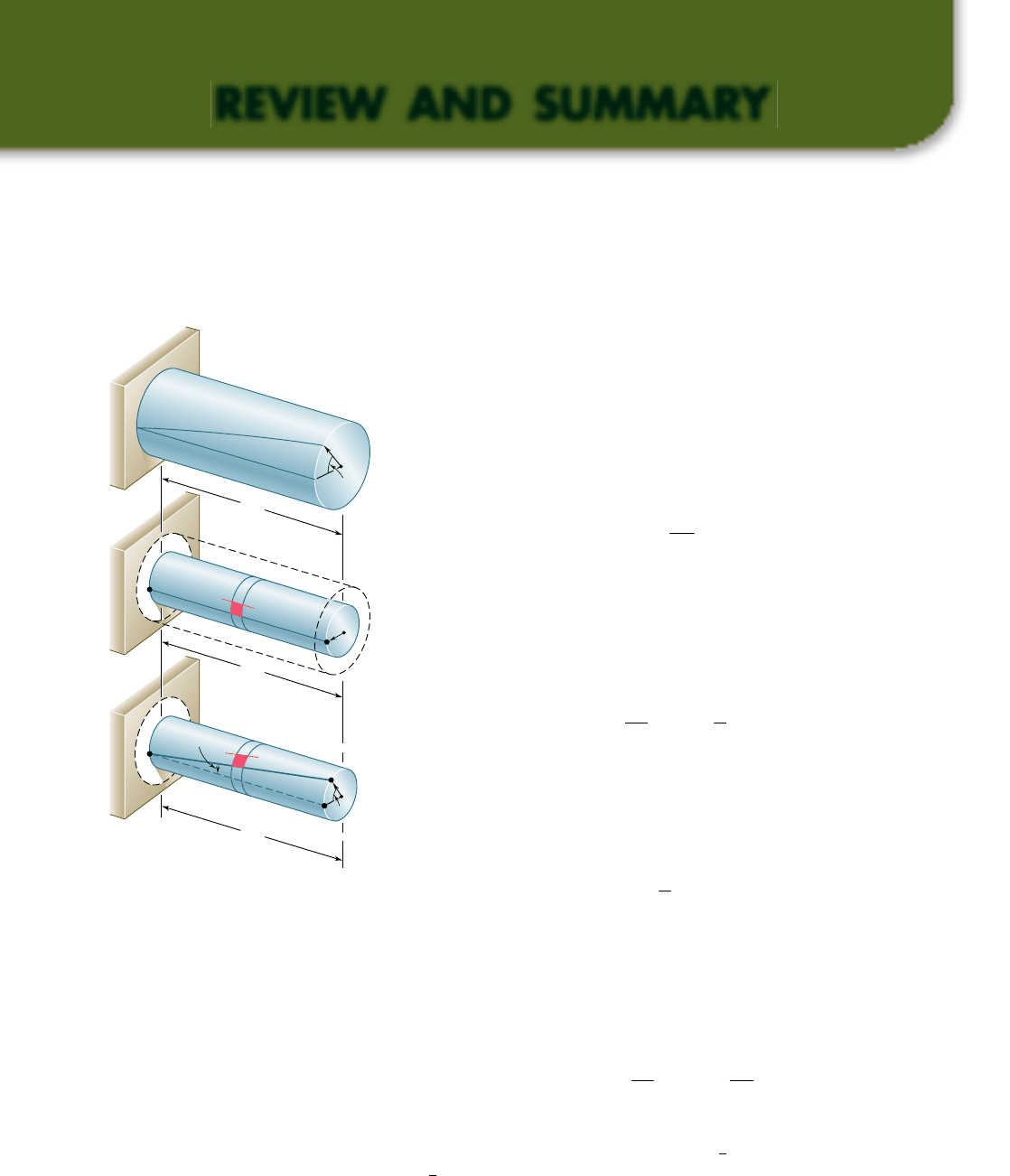
In a preliminary discussion [Sec. 3.2], it was pointed out that
the distribution of stresses in the cross section of a circular shaft is
statically indeterminate. The determination of these stresses, there-
fore, requires a prior analysis of the deformations occurring in the
shaft [Sec. 3.3]. Having demonstrated that in a circular shaft sub-
jected to torsion, every cross section remains plane and undistorted,
we derived the following expression for the shearing strain in a small
element with sides parallel and perpendicular to the axis of the shaft
and at a distance r from that axis:
g 5
rf
L
(3.2)
where f is the angle of twist for a length L of the shaft (Fig. 3.57).
Equation (3.2) shows that the shearing strain in a circular shaft var-
ies linearly with the distance from the axis of the shaft. It follows
that the strain is maximum at the surface of the shaft, where r is
equal to the radius c of the shaft. We wrote
g
max
5
cf
L
g 5
r
c
g
ma
x
(3.3, 4)
Considering shearing stresses in a circular shaft within the elastic
range [Sec. 3.4] and recalling Hooke’s law for shearing stress and
strain, t 5 Gg, we derived the relation
t 5
r
c
t
ma
x
(3.6)
which shows that within the elastic range, the shearing stress t in a
circular shaft also varies linearly with the distance from the axis of
the shaft. Equating the sum of the moments of the elementary forces
exerted on any section of the shaft to the magnitude T of the torque
applied to the shaft, we derived the elastic torsion formulas
t
max
5
Tc
J
t 5
Tr
J
(3.9, 10)
where c is the radius of the cross section and J its centroidal polar
moment of inertia. We noted that
J 5
1
2
pc
4
for a solid shaft and
J 5
1
2
p1c
4
2
2 c
4
1
2 for a hollow shaft of inner radius c
1
and outer
radius c
2
.
Deformations in circular shafts
L
L
(a)
(b)
(c)
L
B
O
c
B
B
A
O
O
A'
A
Fig. 3.57
Shearing stresses in elastic range
bee80288_ch03_140-219.indd Page 210 9/21/10 3:10:12 PM user-f499bee80288_ch03_140-219.indd Page 210 9/21/10 3:10:12 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
211
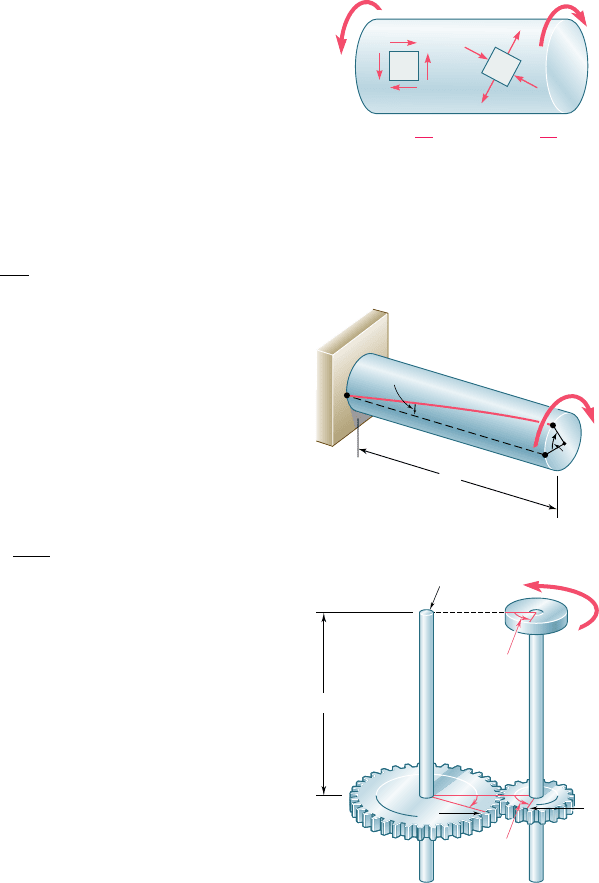
We noted that while the element a in Fig. 3.58 is in pure shear,
the element c in the same figure is subjected to normal stresses of
the same magnitude, TcyJ, two of the normal stresses being tensile
and two compressive. This explains why in a torsion test ductile
materials, which generally fail in shear, will break along a plane per-
pendicular to the axis of the specimen, while brittle materials, which
are weaker in tension than in shear, will break along surfaces forming
a 458 angle with that axis.
In Sec. 3.5, we found that within the elastic range, the angle of twist
f of a circular shaft is proportional to the torque T applied to it (Fig.
3.59). Expressing f in radians, we wrote
f 5
T
L
JG
(3.16)
where L 5 length of shaft
J 5 polar moment of inertia of cross section
G 5 modulus of rigidity of material
If the shaft is subjected to torques at locations other than its ends
or consists of several parts of various cross sections and possibly of
different materials, the angle of twist of the shaft must be expressed
as the algebraic sum of the angles of twist of its component parts
[Sample Prob. 3.3]:
f 5
a
i
T
i
L
i
J
i
G
i
(3.17)
We observed that when both ends of a shaft BE rotate (Fig. 3.60),
the angle of twist of the shaft is equal to the difference between the
angles of rotation f
B
and f
E
of its ends. We also noted that when
two shafts AD and BE are connected by gears A and B, the torques
applied, respectively, by gear A on shaft AD and by gear B on shaft
BE are directly proportional to the radii r
A
and r
B
of the two gears—
since the forces applied on each other by the gear teeth at C are
equal and opposite. On the other hand, the angles f
A
and f
B
through
which the two gears rotate are inversely proportional to r
A
and r
B
—
since the arcs CC9 and CC0 described by the gear teeth are equal
[Example 3.04 and Sample Prob. 3.4].
If the reactions at the supports of a shaft or the internal torques
cannot be determined from statics alone, the shaft is said to be stati-
cally indeterminate [Sec. 3.6]. The equilibrium equations obtained
from free-body diagrams must then be complemented by relations
involving the deformations of the shaft and obtained from the geom-
etry of the problem [Example 3.05, Sample Prob. 3.5].
In Sec. 3.7, we discussed the design of transmission shafts. We first
observed that the power P transmitted by a shaft is
P 5 2p fT (3.20)
where T is the torque exerted at each end of the shaft and f the fre-
quency or speed of rotation of the shaft. The unit of frequency is
Review and Summary
Angle of twist
Statically indeterminate shafts
Fig. 3.59
L
T
c
max
C'
'
T
E
B
C
Fixed end
B
L
A
D
A
C'
E
Fig. 3.60
Tc
J
max
Tc
J
45
a
T
T'
c
Fig. 3.58
Transmission shafts
bee80288_ch03_140-219.indd Page 211 9/21/10 3:10:21 PM user-f499bee80288_ch03_140-219.indd Page 211 9/21/10 3:10:21 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
212
Torsion
the revolution per second (s
21
) or hertz (Hz). If SI units are used,
T is expressed in newton-meters (N ? m) and P in watts (W). If U.S.
customary units are used, T is expressed in lb ? ft or lb ? in., and P
in ft ? lb/s or in ? lb/s; the power may then be converted into horse-
power (hp) through the use of the relation
1 hp 5 550 ft ? lb/s 5 6600 in ? lb/s
To design a shaft to transmit a given power P at a frequency f, you
should first solve Eq. (3.20) for T. Carrying this value and the maxi-
mum allowable value of t for the material used into the elastic for-
mula (3.9), you will obtain the corresponding value of the parameter
Jyc, from which the required diameter of the shaft may be calculated
[Examples 3.06 and 3.07].
In Sec. 3.8, we discussed stress concentrations in circular shafts.
We saw that the stress concentrations resulting from an abrupt
change in the diameter of a shaft can be reduced through the use
of a fillet (Fig. 3.61). The maximum value of the shearing stress at
the fillet is
t
max
5 K
T
c
J
(3.25)
where the stress TcyJ is computed for the smaller-diameter shaft, and
where K is a stress-concentration factor. Values of K were plotted in
Fig. 3.29 on p. 179 against the ratio ryd, where r is the radius of the
fillet, for various values of Dyd.
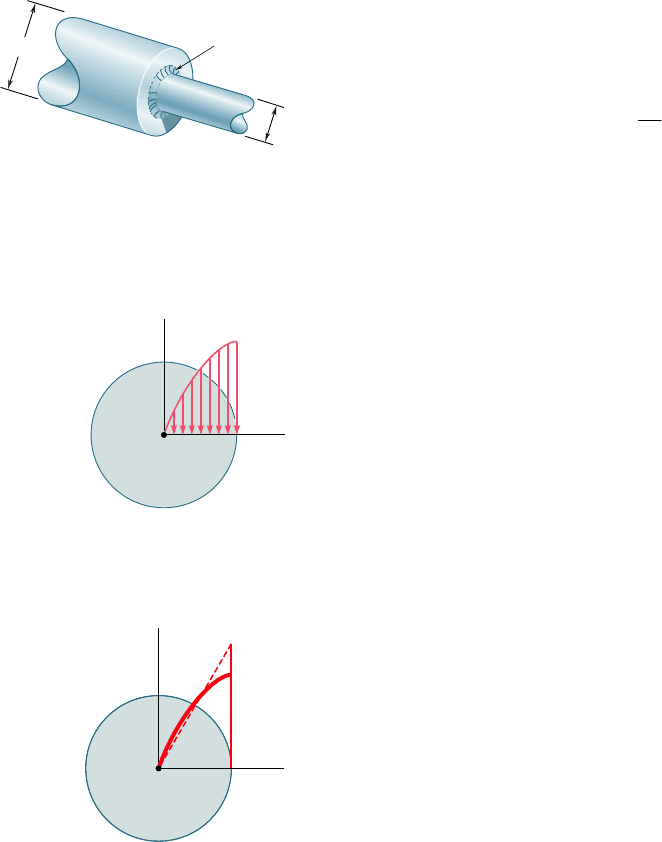
Sections 3.9 through 3.11 were devoted to the discussion of plastic
deformations and residual stresses in circular shafts. We first recalled
that even when Hooke’s law does not apply, the distribution of strains
in a circular shaft is always linear [Sec. 3.9]. If the shearing-stress-
strain diagram for the material is known, it is then possible to plot
the shearing stress t against the distance r from the axis of the shaft
for any given value of t
max
(Fig. 3.62). Summing the contributions to
the torque of annular elements of radius r and thickness dr , we
expressed the torque T as
T 5
#
c
0
rt12pr dr25 2p
#
c
0
r
2
t dr
(3.26)
where t is the function of r plotted in Fig. 3.62.
An important value of the torque is the ultimate torque T
U
which
causes failure of the shaft. This value can be determined, either
experimentally, or by carrying out the computations indicated
above with t
max
chosen equal to the ultimate shearing stress t
U
of
the material. From T
U
, and assuming a linear stress distribution
(Fig 3.63), we determined the corresponding fictitious stress R
T
5
T
U
cyJ, known as the modulus of rupture in torsion of the given
material.
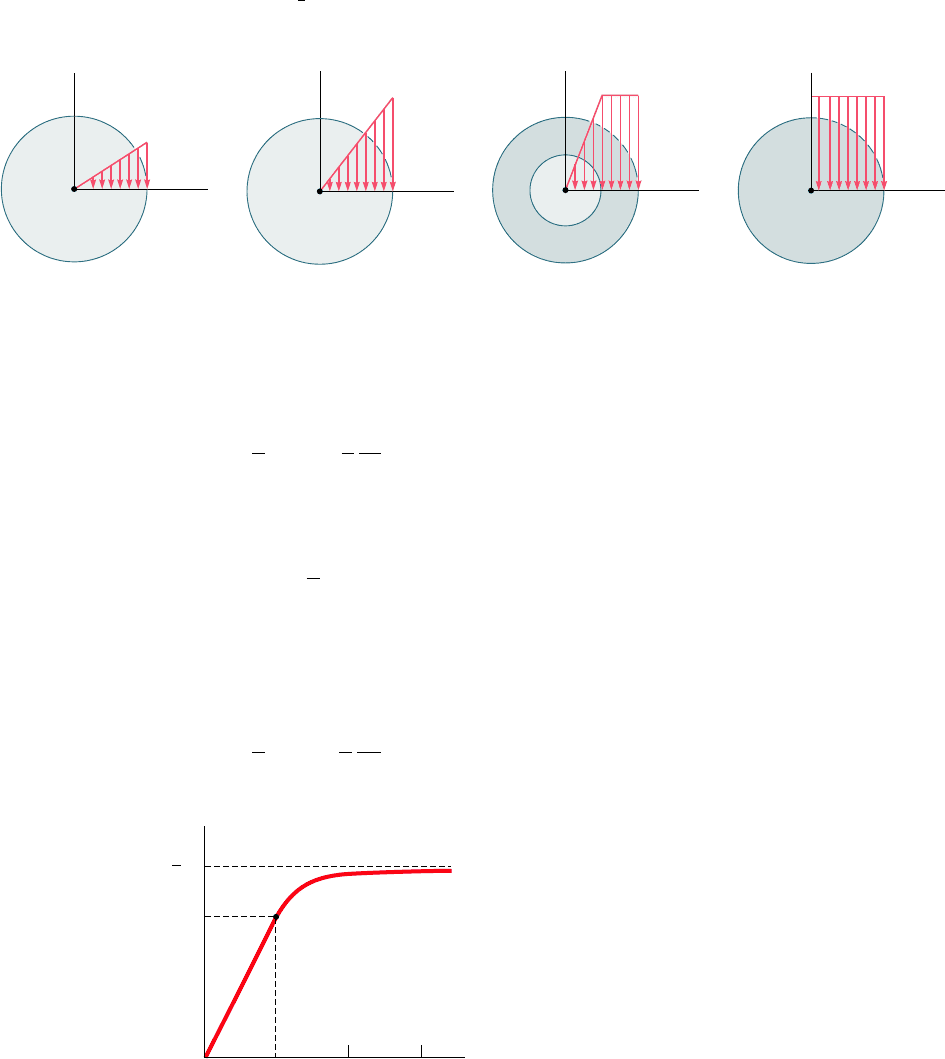
Considering the idealized case of a solid circular shaft made of
an elastoplastic material [Sec. 3.10], we first noted that, as long as
Stress concentrations
D
d
A
Fig. 3.61
Plastic deformations
O
c
max
Fig. 3.62
O
U
c
R
T
Fig. 3.63
Modulus of rupture
bee80288_ch03_140-219.indd Page 212 11/2/10 9:56:48 PM user-f494bee80288_ch03_140-219.indd Page 212 11/2/10 9:56:48 PM user-f494 /207/BSMB003/work%0/indd%0/207/BSMB003/work%0/indd%0
Apago PDF Enhancer
213
t
max
does not exceed the yield strength t
Y
of the material, the stress
distribution across a section of the shaft is linear (Fig. 3.64a). The
torque T
Y
corresponding to t
max
5 t
Y
(Fig. 3.64b) is known as the
maximum elastic torque; for a solid circular shaft of radius c, we
have
T
Y
5
1
2
pc
3
t
Y
(3.29)
Review and Summary
O
(a)
max
Y
c
O
(b)
max
Y
c
O
(c)
c
Y
Y
O
(d)
c
Y
Fig. 3.64
As the torque increases, a plastic region develops in the shaft around
an elastic core of radius r
Y
. The torque T corresponding to a given
value of r
Y
was found to be
T 5
4
3
T
Y
a
1 2
1
4
r
3
Y
c
3
b
(3.32)
We noted that as r
Y
approaches zero, the torque approaches a limit-
ing value T
p
, called the plastic torque of the shaft considered:
T
p
5
4
3
T
Y
(3.33)
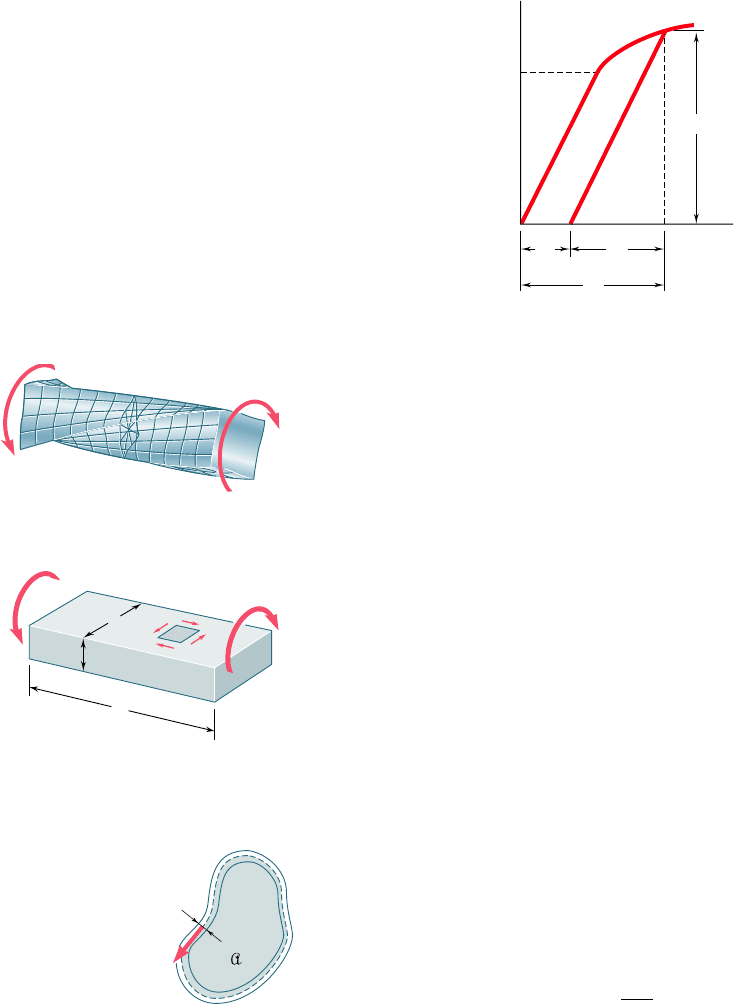
Plotting the torque T against the angle of twist f of a solid
circular shaft (Fig. 3.65), we obtained the segment of straight line
0Y defined by Eq. (3.16), followed by a curve approaching the
straight line T 5 T
p
and defined by the equation
T 5
4
3
T
Y
a1 2
1
4
f
3
Y
f
3
b
(3.37)
0
Y
3
Y
T
Y
T
p
4
T
Y
T
Y
2
Y
3
Fig. 3.65
Solid shaft of elastoplastic material
bee80288_ch03_140-219.indd Page 213 9/21/10 3:10:34 PM user-f499bee80288_ch03_140-219.indd Page 213 9/21/10 3:10:34 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
214
Torsion
Loading a circular shaft beyond the onset of yield and unloading it
[Sec. 3.11] results in a permanent deformation characterized by the
angle of twist f
p
5 f 2 f9, where f corresponds to the loading
phase described in the previous paragraph, and f9 to the unloading
phase represented by a straight line in Fig. 3.66. There will also be
residual stresses in the shaft, which can be determined by adding the
maximum stresses reached during the loading phase and the reverse
stresses corresponding to the unloading phase [Example 3.09].
Permanent deformation.
Residual stresses
0
T
T
T
Y
p
Fig. 3.66
The last two sections of the chapter dealt with the torsion of noncir-
cular members. We first recalled that the derivation of the formulas
for the distribution of strain and stress in circular shafts was based on
the fact that due to the axisymmetry of these members, cross sections
remain plane and undistorted. Since this property does not hold for
noncircular members, such as the square bar of Fig. 3.67, none of the
formulas derived earlier can be used in their analysis [Sec. 3.12].
It was indicated in Sec. 3.12 that in the case of straight bars with a
uniform rectangular cross section (Fig. 3.68), the maximum shearing
stress occurs along the center line of the wider face of the bar. For-
mulas for the maximum shearing stress and the angle of twist were
given without proof. The membrane analogy for visualizing the dis-
tribution of stresses in a noncircular member was also discussed.
We next analyzed the distribution of stresses in noncircular thin-walled
hollow shafts [Sec. 3.13]. We saw that the shearing stress is parallel to
the wall surface and varies both across the wall and along the wall cross
section. Denoting by t the average value of the shearing stress computed
across the wall at a given point of the cross section, and by t the thick-
ness of the wall at that point (Fig. 3.69), we showed that the product
q 5 tt, called the shear flow, is constant along the cross section.
Furthermore, denoting by T the torque applied to the hollow
shaft and by A the area bounded by the center line of the wall cross
section, we expressed as follows the average shearing stress t at any
given point of the cross section:
t 5
T
2
t
A
(3.53)
Torsion of noncircular members
T
T'
Fig. 3.67
Bars of rectangular cross section
L
a
b
max
T
T'
Fig. 3.68
Thin-walled hollow shafts
t
Fig. 3.69
bee80288_ch03_140-219.indd Page 214 9/21/10 3:10:39 PM user-f499bee80288_ch03_140-219.indd Page 214 9/21/10 3:10:39 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
215
REVIEW PROBLEMS
3.151 The ship at A has just started to drill for oil on the ocean floor
at a depth of 5000 ft. Knowing that the top of the 8-in.-diameter
steel drill pipe (G 5 11.2 3 10
6
psi) rotates through two complete
revolutions before the drill bit at B starts to operate, determine
the maximum shearing stress caused in the pipe by torsion.
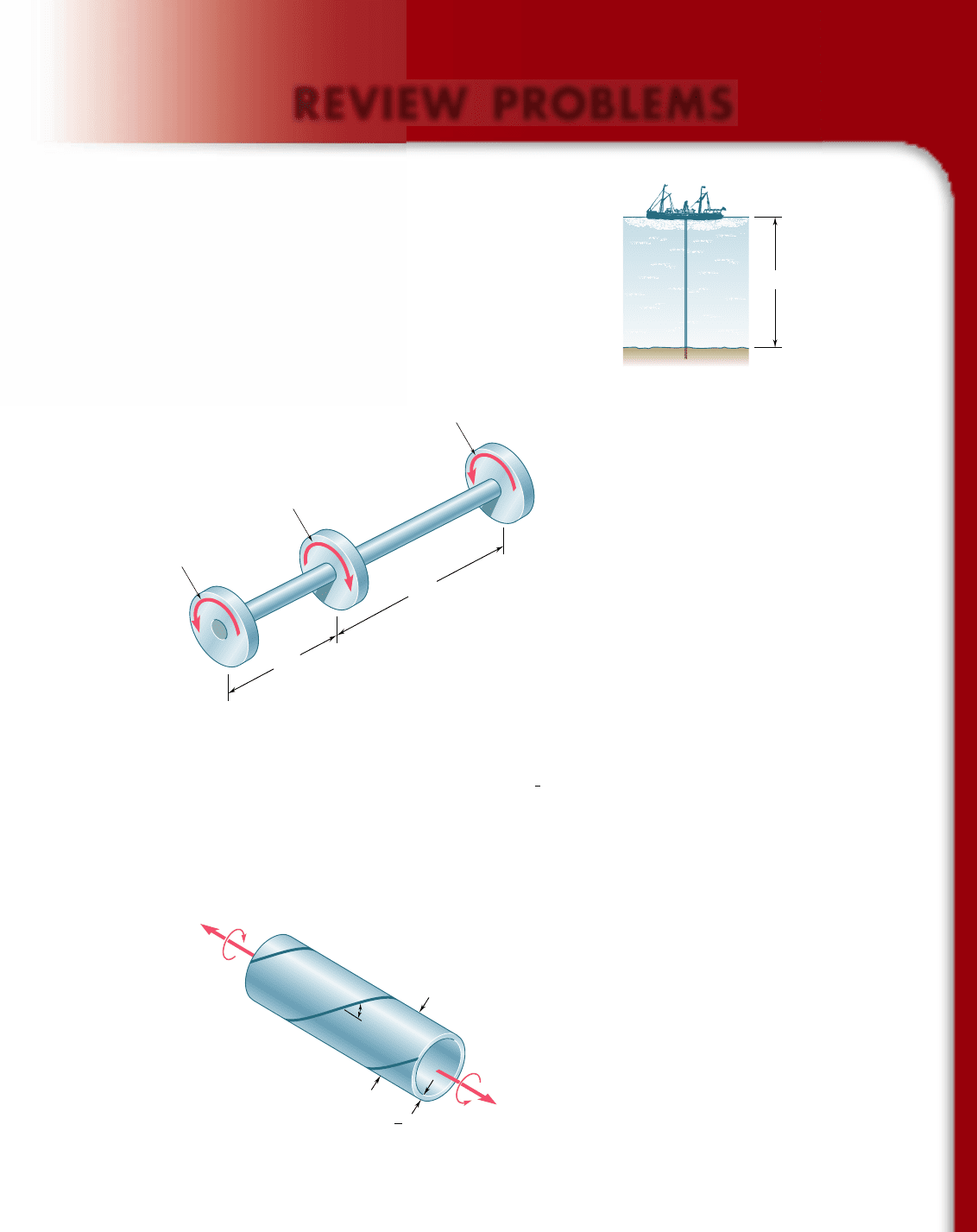
3.152 The shafts of the pulley assembly shown are to be designed. Knowing
that the allowable shearing stress in each shaft is 8.5 ksi, determine
the smallest allowable diameter of (a) shaft AB, (b) shaft BC.
5000 ft
A
B
Fig. P3.151
6.8 kip · in.
72 in.
C
10.4 kip · in.
3.6 kip · in.
B
48 in.
A
Fig. P3.152
3.153 A steel pipe of 12-in. outer diameter is fabricated from
1
4
-in.-thick
plate by welding along a helix that forms an angle of 458 with a
plane perpendicular to the axis of the pipe. Knowing that the
maximum allowable tensile stress in the weld is 12 ksi, determine
the largest torque that can be applied to the pipe.
12 in.
in.
1
4
45⬚
T
T'
Fig. P3.153
bee80288_ch03_140-219.indd Page 215 9/21/10 3:11:46 PM user-f499bee80288_ch03_140-219.indd Page 215 9/21/10 3:11:46 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03
Apago PDF Enhancer
216
Torsion
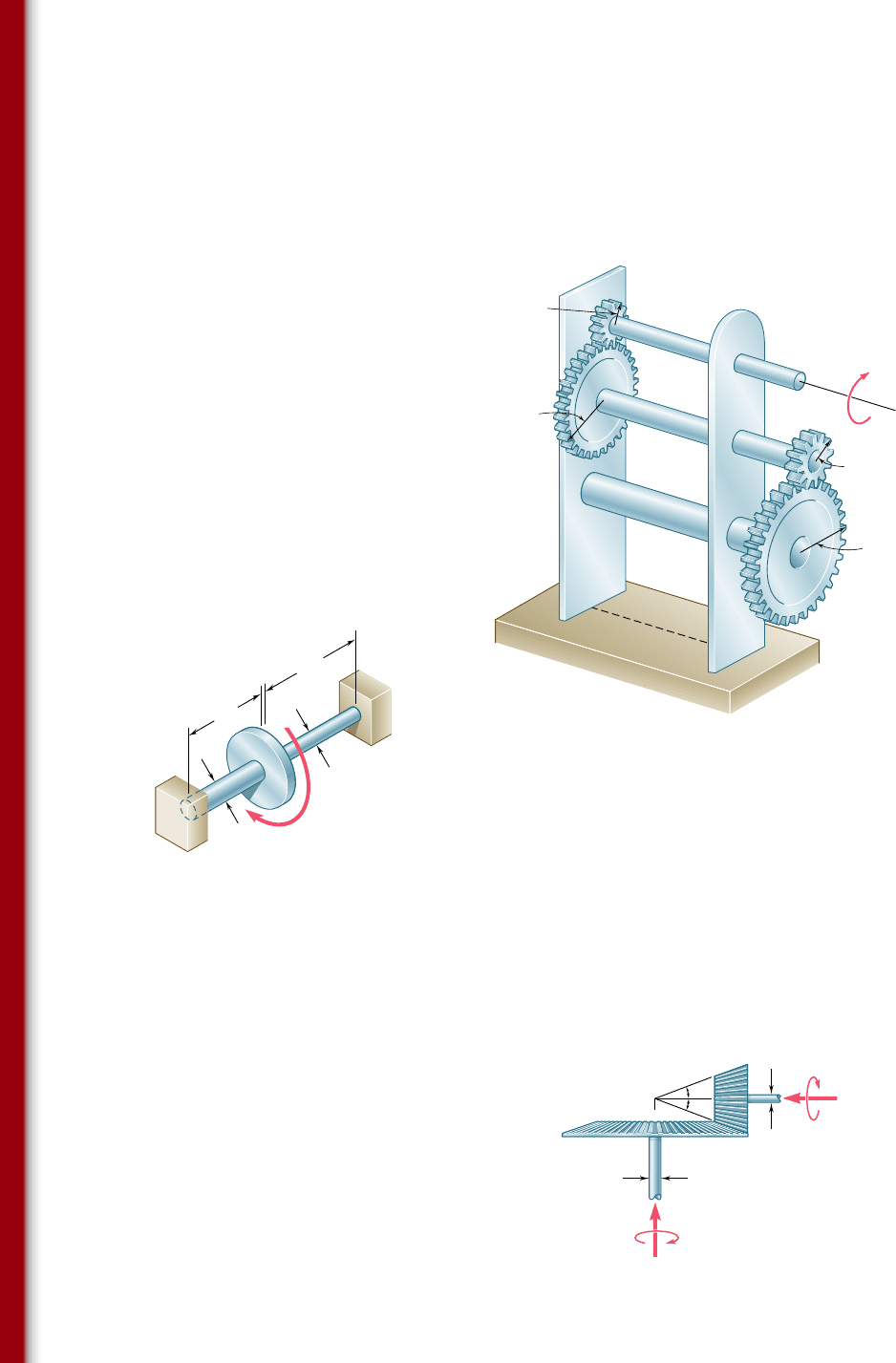
3.154 For the gear train shown, the diameters of the three solid shafts
are:
d
AB
5 20 mm d
CD
5 25 mm d
EF
5 40 mm
Knowing that for each shaft the allowable shearing stress is 60 MPa,
determine the largest torque T that can be applied.
3.155 Two solid steel shafts (G 5 77.2 GPa) are connected to a cou-
pling disk B and to fixed supports at A and C. For the loading
shown, determine (a) the reaction at each support, (b) the maxi-
mum shearing stress in shaft AB, (c) the maximum shearing stress
in shaft BC.
3.156 In the bevel-gear system shown, a 5 18.438. Knowing that the
allowable shearing stress is 8 ksi in each shaft and that the system
is in equilibrium, determine the largest torque T
A
that can be
applied at A.
B
C
75 mm
A
D
E
F
30 mm
90 mm
T
30 mm
Fig. P3.154
250 mm
38 mm
1.4 kN · m
50 mm
C
200 mm
B
A
Fig. P3.155
B
C
A
T
B
T
A
␣
␣
0.625 in.
0.5 in.
Fig. P3.156
bee80288_ch03_140-219.indd Page 216 9/21/10 3:12:38 PM user-f499bee80288_ch03_140-219.indd Page 216 9/21/10 3:12:38 PM user-f499 /Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03/Users/user-f499/Desktop/Temp Work/Don't Delete Job/MHDQ251:Beer:201/ch03