Awange J.,Grafarend E., Palancz B., Zaletnyik P. Algebraic Geodesy and Geoinformatics
Подождите немного. Документ загружается.

282 15 GNSS environmental monitoring
of the computed differences. In Figures 15.11 and 15.12, the computed differences
in bending angles due to nonlinearity assumption for L1 are in the range ±6 ×
10
−5
(degrees) with the maximum absolute value of 5.14 × 10
−5
(degree). For L2,
they are in the range ±5 × 10
−5
(degrees), with the maximum absolute value of
4.85 × 10
−5
(degree). The effects of nonlinearity error on the impact parameters
for L1 are in the range ±1.5 m with the maximum absolute value of 1.444 m, while
those of L2 are in the range ±2 m with the maximum absolute value of 1.534 m.
The large differences in the impact parameters are due to the large distances
of the GPS satellites (r
G
> 20, 000 km). They are used in the se cond equation of
(15.16) to compute the impact parameters to which the bending angles are related.
Any small difference in the computed bending angles due to nonlinearity therefore
contributes significantly to the large differences in the impact parameters. For this
particular occultation therefore, the bending angles of L1 and L2 signals could
probably be related to impact parameters that are off by up to ±2 m.
−6 −4 −2 0 2 4 6
x 10
−5
5
10
15
20
25
30
35
40
45
Deviation of refraction angle from L1 due to nonlinearity
Height(km)
Deviation(degree)
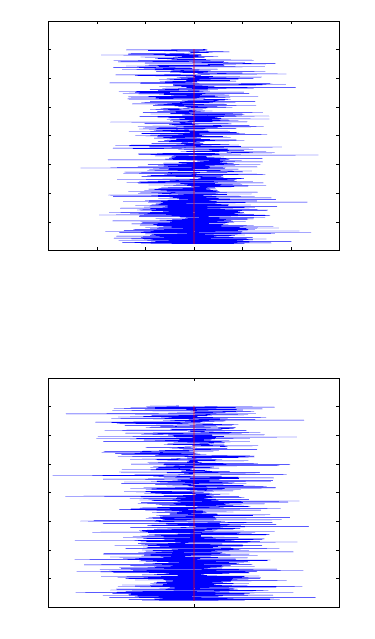
Figure 15.11. Differences in bending angles from L1 due to nonlinearity for occultation
133 of 3rd May 2002.
−5 0 5
x 10
−5
5
10
15
20
25
30
35
40
45
Deviation of refraction angle from L2 due to nonlinearity
Height(km)
Deviation(degree)
Figure 15.12. Differences in bending angles from L2 due to nonlinearity for occultation
133 of 3rd May 2002.
15-4 Algebraic analysis of some CHAMP data 283
−1.5 −1 −0.5 0 0.5 1 1.5
5
10
15
20
25
30
35
40
45
Deviation of impact parameter P from L1 due to nonlinearity
Height(km)
Deviation(m)
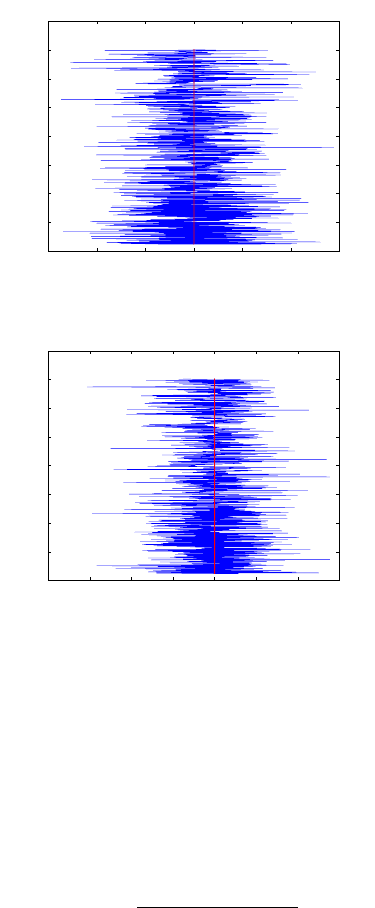
Figure 15.13. Differences in impact parameters from L1 due to nonlinearity for occul-
tation 133 of 3rd May 2002.
−2 −1.5 −1 −0.5 0 0.5 1 1.5
5
10
15
20
25
30
35
40
45
Deviation of impact parameter P from L2 due to nonlinearity
Height(km)
Deviation(m)
Figure 15.14. Differences in impact parameters from L2 due to nonlinearity for occul-
tation 133 of 3rd May 2002.
In-order to assess the overall effect of nonlinearity on the bending angles, both
bending angles from algebraic and Newton’s procedures have to be related to the
same impact parameters. In this analysis, the bending angles of L2 from algebraic
approach and those of L1 and L2 from Newton’s approach are all matched through
interpolation to the impact parameters P1 of L1 from algebraic approach. The
resulting total bending angles from both algebraic and iterative procedures are
then obtained by the linear correction method of [400] as
α(a) =
f
2
1
α
1
(a) − f
2
2
α
2
(a)
f
2
1
− f
2
2
, (15.19)
where f
1
, f
2
are the frequencies of L1 and L2 signals respectively and, α
1
(a) and
α
2
(a) the bending angles from L1 and L2 signals respectively. The resulting bend-
ing angles α(a)
i
from the Newton’s approach and α(a)
a
from algebraic approach
using (15.19) are plotted in Fig. 15.15. The deviation 5α = α(a)
a
− α(a)
i
ob-
tained are plotted in Fig. 15.16 which indicates the nonlinearity error to increase
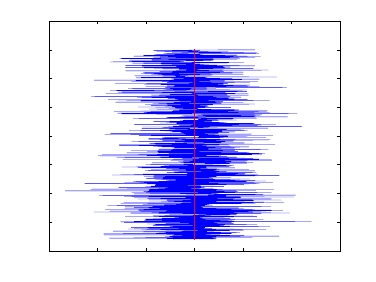
with decreasing atmospheric height. From 40km to 15km, the deviation is within
284 15 GNSS environmental monitoring
±2×10
−4
(degrees) but increases to ±7×10
−4
(degrees) for the region below 15km
with the maximum absolute deviation of 0.00069
◦
for this particular occultation.
This maximum absolute error is less than 1%. Vorob’ev and Krasil’nikova [400]
pointed out that the error due to nonlinearity increases downwards to a maximum
of about 2% when the beam perigee is close to the Earth’s ground. The large
difference in computed bending angles w ith decrease in height is expected as the
region below 5km is affected by the presence of water vapour, and as seen from
Fig. 15.9, the bending angles due to L2 are highly nonlinear.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
5
10
15
20
25
30
35
40
45
Bending anlges from algebraic and iterative approaches
Bending angle(degree)
Height(km)
Bending angles (iterative approach)
Bending angles (algebraic approach)
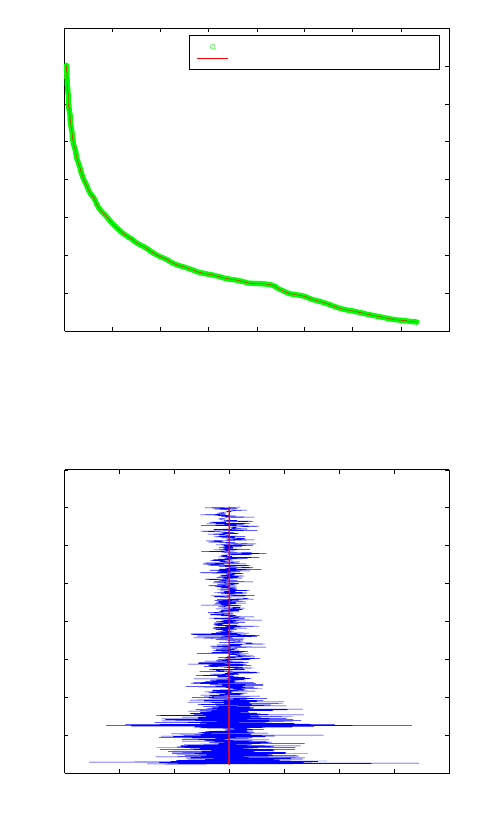
Figure 15.15. Bending angles from iterative and algebraic algorithms matched to the
same impact parameters for occultation 133 of 3rd May 2002.
−6 −4 −2 0 2 4 6 8
x 10
−4
5
10
15
20
25
30
35
40
45
Deviation of bending anlges due to nonlinearity assumption: 03−05−2002
Bending angle(degree)
Height(km)
Figure 15.16. Differences of computed bending angles due to nonlinearity for occultation
133 of 3rd May 2002.
15-4 Algebraic analysis of some CHAMP data 285
The algebraic approach was next used to compute the bending angles of occul-
tation number 3 of 14th May 2001 which occurred past mid-night at 00:39:58.00.
For this period, as stated earlier, the solar radiation is minimum and the effect of
ionospheric noise is also minimum. The results from this occultation show the dif-
ferences in bending angles from the algebraic and Newton’s methods to be smaller
(see Fig. 15.17) compared to those of s olar maximum period. The maximum ab-
solute difference value for b ending angles was 0.00001
◦
. For the computed impact
parameters, the differences were in the range ±5 cm for L1 signal (Fig. 15.18) and
±6 cm for L2 (Fig. 15.19). The maximum absolute values were 4 cm and 5 cm re-
spectively. In comparison to the results of occultation 133 of 3rd May 2002, the
results of occultation 3 of 14th May 2001 indicate the effect of ionospheric noise
during low solar radiation period to be less. The ionospheric noise could there-
fore increase the errors due to nonlinearity. In [36], further analysis of nonlinear
bending angles have shown that there could exist other factors that influence the
nonlinearity error other than the ionospheric noise.
−1.5 −1 −0.5 0 0.5 1 1.5
x 10
−5
5
10
15
20
25
30
35
40
45
Deviation of bending anlges due to nonlinearity assumption: 14−05−2001
Bending angle(degree)
Height(km)
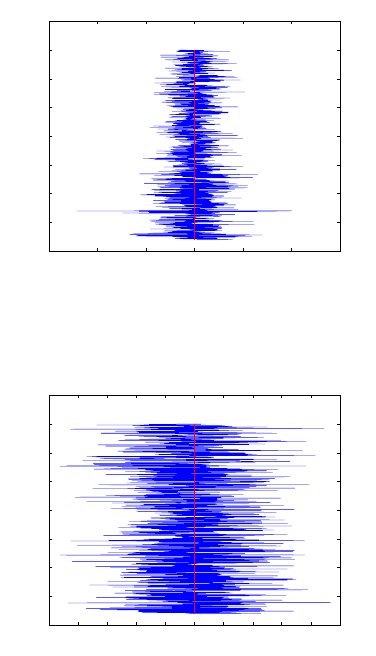
Figure 15.17. Differences in bending angles due to nonlinearity for occultation number
3 of 14th May 2001.
−0.05 −0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 0.04 0.05
5
10
15
20
25
30
35
40
45
Deviation of impact parameter P from L1 due to nonlinearity: 14−05−2001
Deviation(m)
Height(km)
Figure 15.18. Differences in impact parameters from L1 due to nonlinearity for occul-
tation number 3 of 14th May 2001
286 15 GNSS environmental monitoring
−0.06 −0.04 −0.02 0 0.02 0.04 0.06
5
10
15
20
25
30
35
40
45
Deviation of impact parameter P from L2 due to nonlinearity: 14−05−2001
Deviation(m)
Height(km)
Figure 15.19. Differences in impact parameters from L2 due to nonlinearity for occul-
tation number 3 of 14th May 2001
15-5 Concluding remarks
The new concept of GPS meteorology and its application to environmental moni-
toring is still new and an active area of research. The data that has been collected
so far have unearthed several atmospheric properties that were hitherto difficult
to fathom. The new technique clearly promises to contribute significantly and
enormously to environmental and atmospheric studies. When the life span of the
various missions (e.g., CHAMP, GRACE) will have reached, thousands of data will
have been collected which will help unravel some of the hidden and complicated
atmospheric and environmental phenomenon. Satellite missions such as EQUARS
will contribute valuable equatorial data that have long been elusive due to poor
radiosonde coverage. From the analysis of water vapour trappe d in the atmosphere
and the tropopause temperature, global warming studies will be enhanced a great
deal.
We have also successfully presented an independent algebraic algorithm for
solving the system of nonlinear bending angles for space borne GPS meteorology
and shown that nonlinearity correction should be taken into account if the accuracy
of the desired profiles are to be achieved to 1%. In particular, it has been high-
lighted how the nonlinearity errors in bending angles contribute to errors in the
impact parameters to which the bending angles are related. Occultation number
133 of 3rd May 2002 which occurred past noon and occultation number 3 of 14th
May 2001 which occurred past mid-night indicated the significance of ionospheric
noise on nonlinearity error. When ionospheric noise is minimum, e.g., during mid-
night, the computed differences in bending angles between the two procedures
are almost negligible. During maximum solar radiation in the afternoons with
increased ionospheric noise, the computed differences in bending angles between
algebraic and classical Newton’s methods increases.
The proposed algebraic method could therefore be used to control the results of
the classical Newton’s method especially when the ionospheric noise is suspected
to be great, e.g., for occultations that occur during maximum solar radiation pe-
riods. The hurdle that must be overcome however is to concretely identify the
15-5 Concluding remarks 287
criteria for selecting the admissible solution amongst the four algebraic solutions.
In this analysis, the smallest values amongst the four algebraic solutions turned
out to be the admissible in comparison with values of the classical Newton’s ap-
proach. Whether this applies in general is still subject to investigation. In terms of
computing time, the algebraic approach would probably have an advantage over
the classical Newton’s iterative procedure in cases where thousands of occultations
are to be processed. For single occultations however, the classical Newton’ s ap-
proach generally converges after few iterations and as such, the advantage of the
algebraic approach in light of modern computers may not be so significant. For
further literature on GPS meteorology, we refer to [13, 343].

16 Algebraic diagnosis of outliers
16-1 Outliers in observation samples
In Chap. 7, we introduced parameter estimation from observational data sample
and defined the models applicable to linear and nonlinear cases. In-order for the
estimates to be meaningful however;
(a) proper field observations must be carried out to minimize chances of gross
errors,
(b) the observed data sample must be processed to minimize or eliminate the
effects of systematic errors,
(c) appropriate estimation procedures that account for random errors have to be
applied.
Despite the care taken during observation period and the improved models used
to correct systematic errors, observations may still be contaminated with outliers
or gross errors. Outliers are those observations that are inconsistent with the rest
of the observation sample. They often degrade the quality of the estimated pa-
rameters and render them unreliable for any meaningful inferences (deductions).
Outliers find their way into observational data sample through:
• Miscopying during data entry, i.e., a wrong value can be entered during data
input into the computer or other processing machines.
• Misreading during observation period, e.g., number 6 can erroneously be read
as 9.
• Instrumental errors (e.g., problems with centering, vertical and horizontal cir-
cles, unstable tripod stands etc.)
• Rounding and truncation errors (e.g., during data processing)
• Poor models applied to correct systematic errors and estimate parameters (e.g.,
a linear model may be assumed where a nonlinear model could be suitable).
This error is also common during data smoothing where a linear fit is used
where actually a cubic fit could have been most suitable etc.
• Key punch errors during data input etc.
A special problem faced by users while dealing with outliers is the basis on which to
discard observations from a set of data on the grounds that they are contaminated
with outliers.
The least squares method used to estimate parameters assume the observa-
tional errors to be independent and normally distributed. In the presence of gross
errors in the observational data sample, these assumptions are violated and hence
render the estimators, such as least squares, ineffective. Earlier attempts to cir-
cumvent the problem of outlier involved procedures that would first detect and
isolate the outliers before adjusting the remaining data sample. Such procedures
were both statistical as seen in the works of [45, 46, 47, 304, 420, 421, 422], and
non statistical e.g., [219]. Other outlier detection procedures have been presented
by [4, 7].
J.L. Awange et al., Algebraic Geodesy and Geoinformatics, 2nd ed.,
DOI 10.1007/978-3-642-12124-1 16,
c
Springer-Verlag Berlin Heidelberg 2010
290 16 Algebraic diagnosis of outliers
The detection and isolation approach to the outlier problem comes with its
own shortcoming. On one hand, there exists the danger of false deletion and false
retention of the assumed outliers. On the other hand, there exists the problem that
the detection techniques are based on the residuals computed initially using the
least squares method which has the tendency of masking the outliers by pulling
their residuals closer to the regression fit. This makes the detection of outliers
difficult. These setbacks had been recognized by the father of robust statistics P. J.
Huber [232], [233, p. 5] and also [205, pp. 30–31] who suggested that the best option
to deal with the outlier problem was to use robust estimation procedures. Such
procedures would proceed safely despite the presence of outliers, isolate them and
give admissible estimates that could have been achieved in the absence of outliers
(i.e., if underlying distribution was normal). Following the fundamental paper by
P. J. Huber in 1964 [231] and [233], several robust estimation procedures have
been put forward that revolve around the robust M-estimators, L-estimators and
R-estimators. In geodesy and geoinformatics, use of robust estimation techniques
to estimate parameters has been presented e.g., in [5, 19, 20, 108, 196, 244, 246,
247, 306, 351, 422, 425, 426, 428] among others.
In this chapter, we present a non-statistical algebraic approach to outlier di-
agnosis that uses the Gauss-Jacobi combinatorial algorithm presented in Chap. 7.
The combinatorial solutions are analyzed and those containing falsified observa-
tions identified. In-order to test the capability of the algorithm to diagnose outliers,
we inject outliers of different magnitudes and signs on planar ranging and GPS
pseudo-ranging problems. The algebraic approach is then employed to diagnose
the outlying observations.
For GPS pseudo-range observations, the case of multipath effect is considered.
Multipath is the error that occurs when the GPS signal is reflected (mostly by
reflecting surfaces in built up areas) towards GPS receivers, rather than travel-
ling directly to the receiver. This error still remains a menace which hinders full
exploitation of the GPS system. Whereas other GPS observational errors such as
ionospheric and atmospheric refractions can be modelled, the error due to mul-
tipath still poses some difficulties in being contained thus necessitating a search
for procedures that can deal with it. In proposing procedures that can deal with
the error due to multipath, [416] have suggested the use of robust estimation ap-
proach that is based on iteratively weighted least squares (e.g., a generalization
of the Danish method to heterogeneous and correlated observations). Awange [18]
prop os ed the use of algebraic deterministic approach to diagnose outliers of type
multipath.
16-2 Algebraic diagnosis of outliers
Let us illustrate by means of a simple linear example how the algebraic algorithm
diagnoses outliers.
Example 16.1 (Outlier diagnosis using Gauss-Jacobi combinatorial algorithm). Con-
sider a case where three linear equations have been given for the purpose of solving
16-2 Algebraic diagnosis of outliers 291
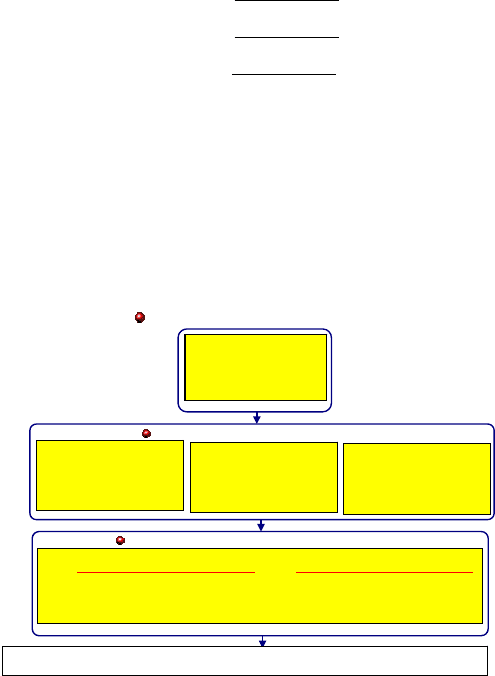
the two unknowns(x, y) in Fig. 16.1. Three pos sible combinations, each containing
two equations necessary for solving the two unknowns, can be formed as shown in
the box labelled “combination”. Each of these systems of two linear equations is
either solved by substitution, graphically or matrix inversion to give three pairs of
solutions {x
1,2
, y
1,2
}, {x
2,3
, y
2,3
} and {x
1,3
, y
1,3
}. The final step involves adjusting
these pseudo-observations {x
1,2
, y
1,2
, x
2,3
, y
2,3
, x
1,3
, y
1,3
} as indicated in the box
labelled “adjustment of the combinatorial subsets solutions”. The weight matrix Σ
or the weight elements {π
1,2
, π
2,3
, π
1,3
} are obtained via nonlinear error/variance-
covariance propagation. Assuming now that observation y
1
is contaminated by
gross error ∂y, then the first two combinatorial sets of the system of equations
containing observation y
1
will have their results {x
1,2
, y
1,2
}, {x
1,3
, y
1,3
} changed
to {x
∗
1,2
, y
∗
1,2
}, {x
∗
1,3
, y
∗
1,3
} respectively because of the change of observation y
1
to
(y
1
+ ∂y). The third combination set {x
2,3
, y
2,3
} without observation (y
1
+ ∂y)
remains unchanged. If one computes the combinatorial positional norms
p
1
=
q
(x
∗2
1,2
+ y
∗2
1,2
)
p
2
=
q
(x
∗2
1,3
+ y
∗2
1,3
)
p
3
=
q
(x
2
2,3
+ y
2
2,3
),
and subtract them from the norms of the adjusted positional values, median or a
priori values (say from maps), one can analyze the deviations to obtain the falsified
observation y
1
which is common in the first two sets. It will be noticed that the
deviation of the first two sets containing the contaminated value is larger than the
uncontaminated set. The median is here used as opp osed to the mean as it is less
sensitive to extreme scores.
Forasystemoflinearequations
+ − =
+ − =
+ − =
111
222
333
0
0
0
ax by y
ax by y
ax by y
⎧
=
⎫
+ − =
⎪⎪
⎪⎪
⎨⎬
⎪⎪
+ − =
⎪⎪
⎩⎭
1,2 1,2
111
222
,
0
0
ax by y
ax y
y
b
x
y
⎧
=
⎫
+ − =
⎪⎪
⎪⎪
⎨⎬
⎪⎪
+ − =
⎪⎪
⎩⎭
1,3 1,3
111
333
,
0
0
ax by y
ax y
y
b
x
y
⎧
=
⎫
+ − =
⎪⎪
⎪⎪
⎨⎬
⎪⎪
+ − =
⎪⎪
⎩⎭
2,3 2,3
222
333
,
0
0
ax by y
ax y
y
b
x
y
Form3combinatorialsolutions
Adjustthecombinatorialsubsetsolutions
1,2 1,2 1,3 1,3 2,3 2,3 1,2 1,2 1,3 1,3 2,3 2,3
1,2 1,3 2,3 1,2 1,3 2,3
11 1
,
( Σ ) Σ
xxx yyy
xy
or
πππ πππ
πππ πππ
−− −
⎧⎫
⎪⎪
++ ++
⎪⎪
==
⎨⎬
⎪⎪
++ ++
⎪⎪
⎩⎭
′′
=ξ AAAy
Subtractthecombinatorialsolutionsfromtheadjustedtodetect outliers
Figure 16.1. Algebraic outlier diagnosis steps

292 16 Algebraic diagnosis of outliers
The program operates in the following steps:
Step 1: Given an overdetermined system with n observations in m unknowns, k
combinations are formed using (7.28) on p. 93.
Step 2: Each of the minimal combination is solved in closed form using either
Groebner basis or polynomial res ultant algebraic technique of Chaps. 4 or 5.
From the combinatorial solutions, compute the positional norm.
Step 3: Perform the nonlinear error/variance-covariance propagation to obtain
the weight matrix of the pseudo-observations resulting from step 2.
Step 4: Using these pseudo-observations and the weight matrix from step 3, per-
form an adjustment using linear Gauss-Markov model (7.12) on p. 87.
Step 5: Compute the adjusted barycentric coordinate values together with its
positional norm and the median positional norm from step 2. Subtract these
positional norms from those of the combinatorial solutions to diagnose outliers
from the deviations.
16-21 Outlier diagnosis in planar ranging
In Sect. 12-3 of Chap. 12, we discussed the planar ranging problem and presented
the solution to the overdetermined case. We demonstrated by means of Example
12.4 on p. 198 how the position of unknown station could be obtained from distance
measurements to more than two s tations. In this section, we use the same example
to demonstrate how the algebraic combinatorial algorithm can be used to diagnose
outliers. From observational data of the overdetermined planar ranging problem
of [237] given in Table 12.11 on p. 198, the position of the unknown station is
determined. The algorithm is then applied to diagnose outlying observations. Let
us consider three cases as follow s; first, the algorithm is subjected to outlier free
observations and used to compute the positional norms. Next, an outlier of 0.95 m
is injected to the distance observation to station 2 and the algorithm applied to
diagnose that particular observation. Finally, the distance observed to station 4 is
considered to have been miss-booked with 6 typed as 9, thus leading to an error
of 3 m.
Example 16.2 (Outlier free observations). From the values of Table 12.11 and using
(7.28) on p. 93, 6 combinations, each consisting of two observation equations are
formed. The aim is to obtain the unknown position from the nonlinear ranging
observations equations. From the computed positions in step 2, the positional
norms are given by
P
i
=
q
X
2
i
+ Y
2
i
|
i=1, . . . ,6
, (16.1)
where (X
i
, Y
i
) |
i=1, . . . ,6
are the two-dimensional geocentric coordinates of the un-
known station computed from each combinatorial pair. Table 16.1 indicates the
combinations, their computed positional norms, and deviations from the norm of
the adjusted value (48941.769 m) from step 4. The results are for the case of outlier
free observations. These deviations are plotted against combinatorial numbers in
Fig. 16.2.